SLAM 精度评估
相关文章:
SLAM 精度评估
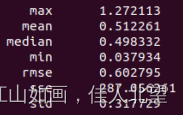
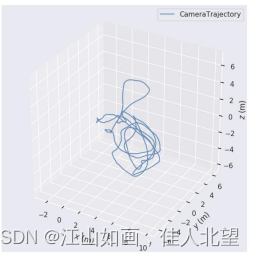
SLAM 精度的评估有两个最重要的指标,即绝对轨迹误差(ATE)和相对位姿误差(RPE)的 均方根误差(RMSE): 绝对轨迹误差:直接计算相机位姿的真实值与 SLAM 系统的估计值之间的差值,首先将…...
Postman使用教程
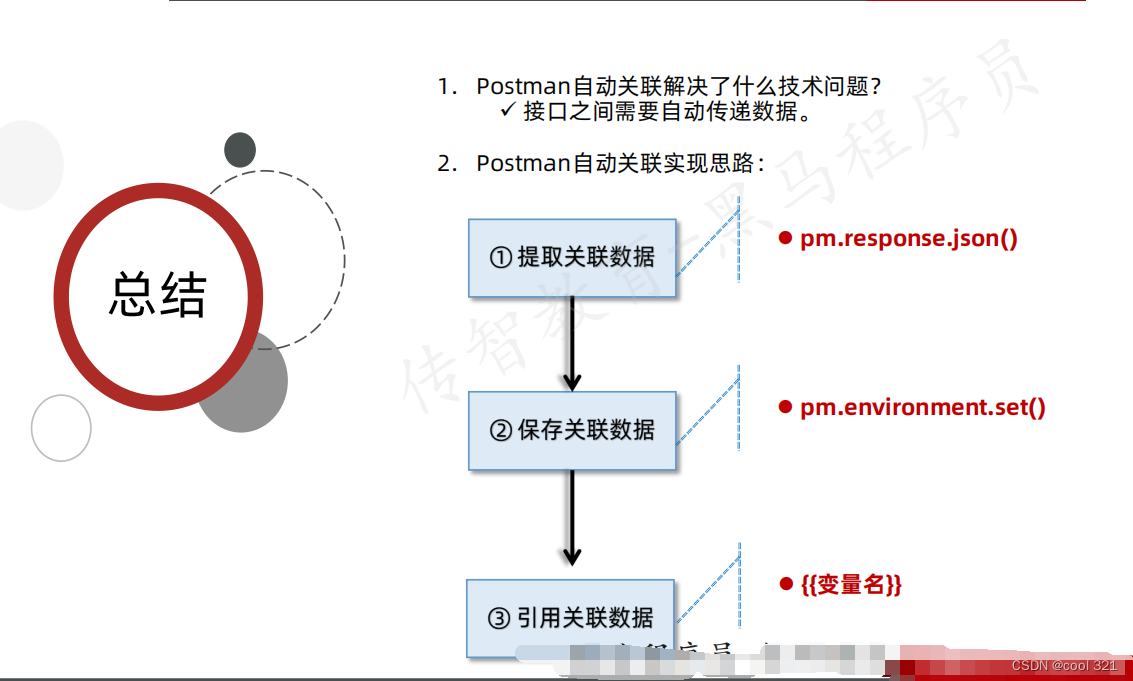
传统接口风格 RESTful风格 使用Postman完成测试用例目标: Postman教程 (1)准备工作,下载Postman新建 (2)登录接口调试-获取验证码 (3)登录接口调试-登录 (4)…...

UDP协议深入解析
一. UDP报文结构 UDP报文由以下4个字段组成: 源端口号(Source Port):16位,标识发送方的端口号。如果发送方没有使用端口号,则该字段为0。 目标端口号(Destination Port):16位,标识接收方的端口号。 长度(Length):16位,表示UDP报文的总长度,…...
Rethinking Federated Learning with Domain Shift: A Prototype View
CVPR2023,针对分布式数据来自不同的域时,私有模型在其他域上表现出退化性能(具有域转移)的问题。提出用于域转移下联邦学习的联邦原型学习(FPL)。核心思想是构建集群原型和无偏原型,提供富有成效的领域知识和公平的收敛目标。将样本嵌入拉近到属于相同语义的集群原型,而…...

打卡第2天----数组双指针,滑动窗口
今天是参与训练营第二天,这几道题我都看懂了,自己也能写出来了,实现思路很重要,万事开头难,希望我可以坚持下去。希望最后的结果是量变带来质变。 一、理解双指针思想 leetcode编号:977 不止是在卡尔这里…...

Running cmake version 2.8.12.2解决方案
Centos7安装mysql8.0,编译环节出现如下报错: Running cmake version 2.8.12.2 CMake Warning at CMakeLists.txt:82 (MESSAGE):Please use cmake3 rather than cmake on this platform-- Please install cmake3 (yum install cmake3) CMake Error at CMa…...
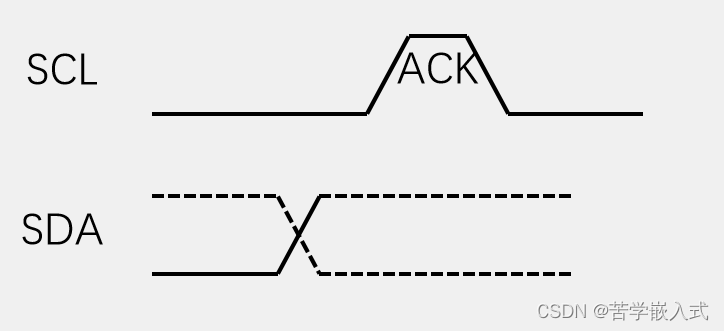
stm32中IIC通讯协议
参考资料:大部分均引用b站江协科技课程、GPT及网络资料 什么是IIC(i2C)通讯协议? 关键字:SCL、SDA、半双工、同步、串行。 IIC(Inter-Integrated Circuit),也称为I2C(In…...
那些年因为连接失败而一起熬过的夜)
允许防火墙通过端口 6379(通常用于 Redis 服务)那些年因为连接失败而一起熬过的夜
要允许防火墙通过端口 6379(通常用于 Redis 服务),您可以按照以下步骤在防火墙中添加规则。这里提供了使用 firewalld 和 ufw 两种常见防火墙管理工具的方法。 使用 firewalld (CentOS、Red Hat 等) 1. 启动并启用 f…...

tsconfig.json的include和exclude作用
tsconfig.json中的include和exclude属性用于指定需要被编译的TypeScript文件和需要被排除的文件。 include属性:用于指定哪些.ts、.tsx或.d.ts文件需要被编译。如果不指定include属性,则默认当前目录下除了exclude之外的所有.ts、.d.ts、…...

firewalld(8) policies
简介 前面的文章中我们介绍了firewalld的一些基本配置以及NAT的相关配置。在前面的配置中,我们所有的策略都是与zone相关的,例如配置的rich rule,--direct,以及NAT,并且这些配置都是数据包进入zone或者从zone发出时设置的策略。 我们在介绍…...
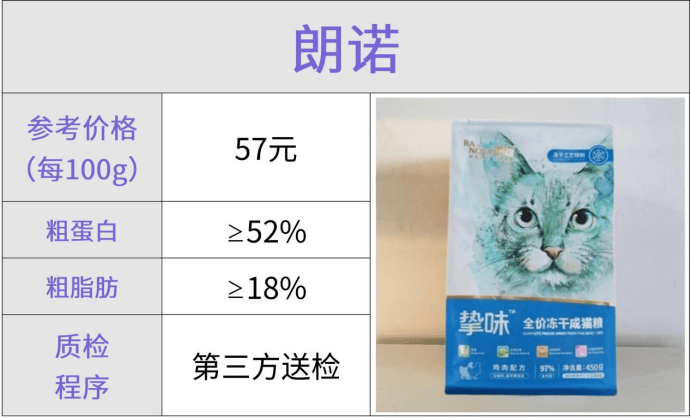
为什么进口主食冻干那么高贵?必入榜主食冻干总结分享
新手养猫人常常会有这样的疑问:为何进口主食冻干价格如此昂贵,但仍有大量养猫达人对其推崇备至?与国产主食冻干相比,进口产品的价格高出3-4倍之多,那么这高昂的价格背后,进口主食冻干是否真的值得推荐&…...

状态模式在金融业务中的应用及其框架实现
引言 状态模式(State Pattern)是一种行为设计模式,它允许对象在内部状态改变时改变其行为。状态模式通过将状态的相关行为分离到独立的状态类中,使得状态转换更加明确和简洁。在金融业务中,状态模式可以用于实现交易状…...
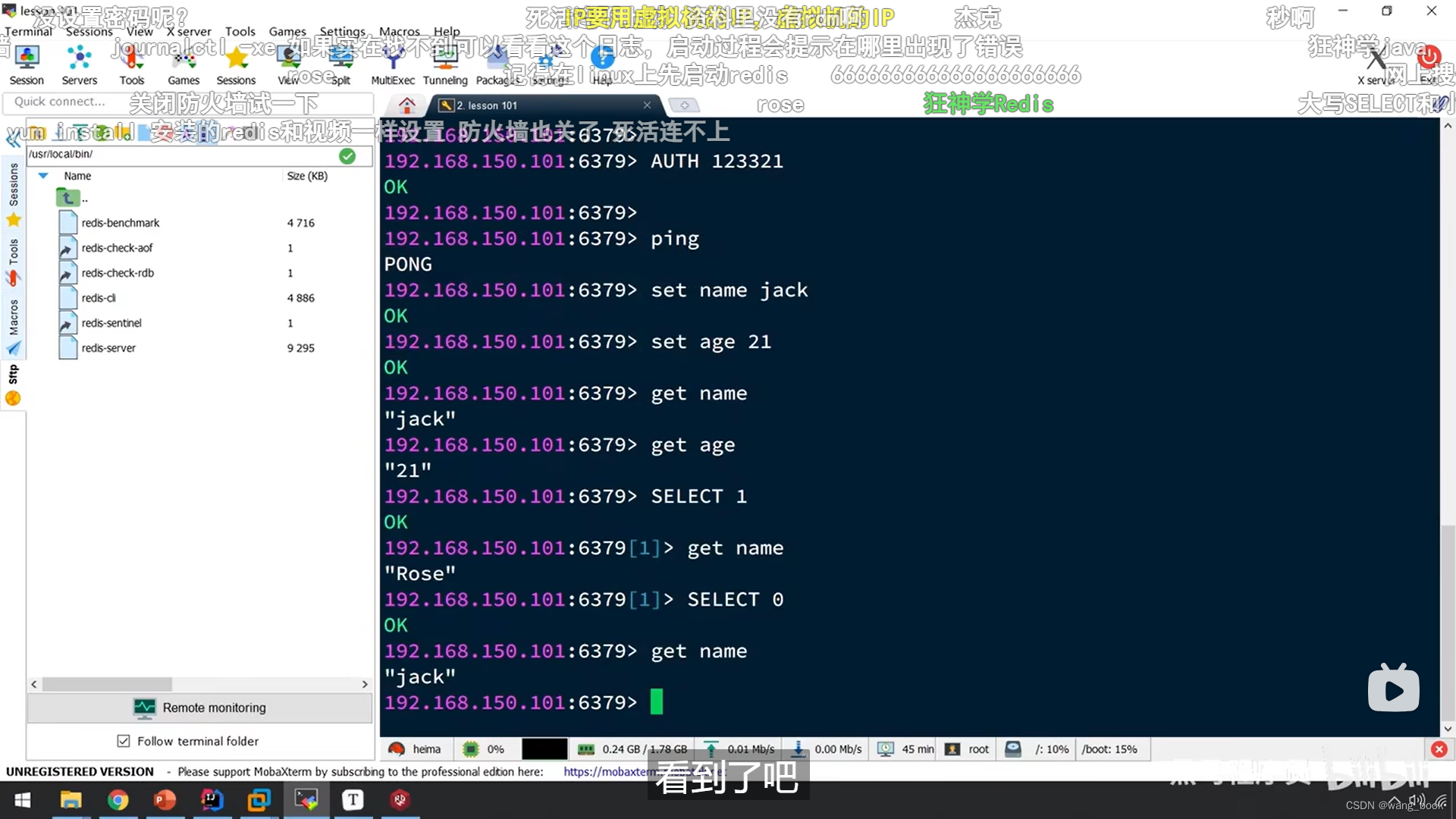
redis学习(002 安装redis和客户端)
黑马程序员Redis入门到实战教程,深度透析redis底层原理redis分布式锁企业解决方案黑马点评实战项目 总时长 42:48:00 共175P 此文章包含第5p-第p7的内容 文章目录 安装redis启动启动方式1:可执行文件启动启动方式2 基于配置文件启动修改redis配置文件 …...

在线客服系统多国语言,适合跨境外贸业务对外沟通 ,哈萨克语客服系统,根据浏览器语种标识自动切换...
我们看一下我们客服系统的哈萨克语展示。 演示网站:gofly.v1kf.com 有个客户,他们的业务主要是位于哈萨克斯坦,需求是访客端使用哈萨克语来展示。 现在这个界面就是哈萨克语的。当然,也可以切换成中文。界面上的文案已经切换成中文…...

等保2.0是否强制要求所有物联网设备都必须支持自动更新?
等保2.0对物联网设备自动更新的要求 等保2.0(网络安全等级保护2.0)是中国政府为了加强网络安全而推出的一套标准和要求。在物联网设备的安全管理方面,等保2.0确实提出了一系列措施,以确保设备的软件安全更新。这些措施包括&#…...

gin框架解决跨域问题
文章目录 前言一、使用github.com/gin-contrib/cors 前言 今天遇到了前后端跨域问题,前后端跨域解决蛮简单的,下面是解决方案 一、使用github.com/gin-contrib/cors go get github.com/gin-contrib/cors在路由的地方 r : gin.Default()corsConfig : c…...

4.判断登录用户选择按钮的展示
接着上一个文章,我们把按钮设置好了之后怎样可以做到登录的用户不同,选择展示的按钮不同? 我们可以从面向对象上手,例如获取到返回网站数据中,判断登录用户有特殊权限,就是管理员: # 1.判断登录…...

【硬核科普】存算一体化系统(Processing-in-Memory, PIM)深入解析
文章目录 0. 前言1. 提出背景1.1 存储墙1.2 功耗墙 2. 架构方案2.1 核心特征2.2 技术实现2.2.1 电流模式2.2.2 电压模式2.2.3 模式选择 2.3 PIM方案优势 3. 应用场景4. 典型产品4.1 鸿图H304.2 三星HBM-PIM 5. 存算一体化缺点6. 总结 0. 前言 按照国际惯例,首先声明…...

基于Java的壁纸网站设计与实现
💗博主介绍💗:✌在职Java研发工程师、专注于程序设计、源码分享、技术交流、专注于Java技术领域和毕业设计✌ 温馨提示:文末有 CSDN 平台官方提供的老师 Wechat / QQ 名片 :) Java精品实战案例《700套》 2025最新毕业设计选题推荐…...

Zookeeper底层原理
ZooKeeper 是一个高可用的分布式协调服务,广泛应用于分布式系统中,用于解决分布式系统的一致性问题。下面将详细介绍 ZooKeeper 的底层原理,包括其架构、数据模型、核心机制和一致性协议等方面。 1. 架构 ZooKeeper 采用主从架构࿰…...

幻兽帕鲁玩不了?别急着删游戏!手把手教你用命令行参数搞定UE5黑屏闪退
幻兽帕鲁玩不了?别急着删游戏!手把手教你用命令行参数搞定UE5黑屏闪退 每次打开《幻兽帕鲁》都卡在黑屏界面?游戏刚启动就闪退?这种体验确实让人抓狂。作为一款采用虚幻引擎5(UE5)技术打造的热门游戏&…...
)
不止是选择器:用Unity Dropdown组件打造一个可交互的游戏设置菜单(附完整C#脚本)
不止是选择器:用Unity Dropdown组件打造一个可交互的游戏设置菜单在游戏开发中,设置菜单是玩家与游戏交互的重要桥梁。一个设计精良的设置菜单不仅能提升用户体验,还能让玩家根据个人偏好调整游戏参数。Unity的Dropdown组件常被简单用作选择器…...

30+平台文档一键免费下载:浏览器文档下载工具的终极解决方案
30平台文档一键免费下载:浏览器文档下载工具的终极解决方案 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是…...

自适应能量对齐:提升电子态密度机器学习预测精度的关键技术
1. 项目概述:为什么电子态密度的机器学习预测需要“自适应对齐”?在计算材料科学领域,电子态密度(DOS)是一个核心的物理量。它描绘了材料中电子能级随能量的分布情况,就像一张材料的“电子身份证”。通过这…...

权威测评!2026年顶尖AI论文写作软件榜单,高质初稿轻松写
2026 年实测 10 款主流 AI 论文工具,千笔AI以全流程覆盖 语义级降重 免费查重领跑综合榜;ThouPen 稳坐留学生毕业全流程工具头把交椅;免费工具中DeepSeek Scholar、豆包学术版表现亮眼,30 分钟即可生成万字高质量初稿࿰…...

m4s-converter终极指南:3步解锁B站缓存视频的离线观看自由
m4s-converter终极指南:3步解锁B站缓存视频的离线观看自由 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经在B站缓存了心爱…...

Unity Android打包卡在detecting sdk tools version的根因与四套解决方案
1. 这个卡在“detecting current sdk tools version”的坑,我踩了三次才摸清门道 Unity打包时卡在“detecting current sdk tools version”这行日志上,光标静止、进度条不动、CPU占用率忽高忽低——你点开Android SDK目录,发现tools文件夹里…...

小微团队如何利用Taotoken管理多个项目的AI成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 小微团队如何利用Taotoken管理多个项目的AI成本 对于创业团队或小微企业而言,在拥抱大模型能力的同时,如何…...

深入解析中兴光猫工厂模式:解锁隐藏网络管理权限的技术探索
深入解析中兴光猫工厂模式:解锁隐藏网络管理权限的技术探索 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 在当今的网络设备管理中,中兴光猫作为广泛部署的终端…...

茅台预约自动化系统:构建高并发智能调度解决方案
茅台预约自动化系统:构建高并发智能调度解决方案 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gitco…...