基于YOLOv10+YOLOP+PYQT的可视化系统,实现多类别目标检测+可行驶区域分割+车道线分割【附代码】
文章目录
- 前言
- 视频效果
- 必要环境
- 一、代码结构
- 1、 训练参数解析
- 2、 核心代码解析
- 1.初始化Detector类
- 2. @torch.no_grad()
- 3. 复制输入图像并初始化计数器
- 4. 调用YOLOv10模型进行目标检测
- 5. 提取检测结果信息
- 6. 遍历检测结果并在图像上绘制边界框和标签
- 7. 准备输入图像以适应End-to-end模型
- 8. 使用YOLOP模型进行推理
- 9. 处理可行驶区域分割结果
- 10. 处理车道线分割结果
- 二、效果展示
- 三、完整代码获取
- 总结
前言
在往期博客中,我们详细介绍了如何搭建YOLOv10和YOLOP的环境。本期将结合这两个算法,实现多类别目标检测、可行驶区域分割和车道线分割等多种任务,并将其部署到PYQT界面中进行展示。
视频效果
b站链接:基于YOLOv10+YOLOP+PYQT的可视化系统,实现多类别目标检测+可行驶区域分割+车道线分割多种任务
必要环境
- 配置yolov10环境 可参考往期博客
地址:搭建YOLOv10环境 训练+推理+模型评估
- 配置yolop环境 可参考往期博客
地址:YOLOP 训练+测试+模型评估
一、代码结构
1、 训练参数解析
首先,我们利用 argparse 模块来设置命令行参数,以便灵活配置模型的权重路径、使用设备(cpu、gpu)等信息
# 解析命令行参数
parser.add_argument('--v10weights', default=r"yolov10s.pt", type=str, help='weights path')
parser.add_argument('--weights', default=r"weights/End-to-end.pth", type=str, help='weights path')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--imgsz', type=int, default=640, help='image size')
parser.add_argument('--merge_nms', default=False, action='store_true', help='merge class')
parser.add_argument('--conf_thre', type=float, default=0.3, help='conf_thre')
parser.add_argument('--iou_thre', type=float, default=0.2, help='iou_thre')
parser.add_argument('--augment', action='store_true', help='augmented inference')
opt = parser.parse_args()
关键参数详解:
-
–v10weights: 指定YOLOv10模型的权重文件路径。
-
–weights: 指定YOLOP模型的权重文件路径,这个模型包含了车道线分割和可行驶区域分割的任务
-
–device: 指定运行模型的设备,可以是单个GPU(如 0),或者是CPU(cpu)
-
–imgsz: 指定输入图像的尺寸,输入图像会被调整为这个尺寸,以适应模型的输入要求
-
–conf_thre: 设置初始置信度阈值,只有置信度高于这个阈值的检测框才会被保留
-
–iou_thre: 设置初始IOU阈值,在NMS过程中,只有IOU低于这个阈值的检测框才会被保留
2、 核心代码解析
此部分包含车道线分割、可行驶区域分割和目标检测等关键部分的代码
1.初始化Detector类
这段代码定义了一个名为Detector的类,该类初始化了两个模型:一个是用于End-to-end检测的YOLOP模型,另一个是用于目标检测的YOLOv10模型。通过加载权重文件、设置设备、调整图像大小以及配置模型参数,实现了对这两个模型的初始化和准备工作
class Detector:def __init__(self, v10weights, cfg, device, model_path=r'./best_dist_model.pt', imgsz=640, conf=0.5, iou=0.0625, merge_nms=False):self.device = deviceself.model = get_net(cfg)checkpoint = torch.load(model_path, map_location=device)self.model.load_state_dict(checkpoint['state_dict'])self.model = self.model.to(device)img_w = torch.zeros((1, 3, imgsz, imgsz), device=device)_ = self.model(img_w)self.model.eval()self.stride = int(self.model.stride.max())self.imgsz = check_img_size(imgsz, s=self.stride)self.merge_nms = merge_nmsself.model_v10 = YOLOv10(v10weights)self.names = self.model_v10.names
2. @torch.no_grad()
这是一个装饰器,用于禁用梯度计算,可以减少内存消耗并加快推理速度,通常在推理时使用
@torch.no_grad()
def __call__(self, image: np.ndarray, conf, iou):
3. 复制输入图像并初始化计数器
复制输入图像以便在结果图像上进行操作,并初始化一个默认字典来记录每个类别的检测次数
img_vis = image.copy()
class_counts = defaultdict(int)
4. 调用YOLOv10模型进行目标检测
使用YOLOv10模型在输入图像上进行目标检测,返回检测结果
results = self.model_v10(image, verbose=True, conf=conf, iou=iou, device=self.device)
5. 提取检测结果信息
提取检测结果中的类别、置信度和边界框坐标
bboxes_cls = results[0].boxes.cls
bboxes_conf = results[0].boxes.conf
bboxes_xyxy = results[0].boxes.xyxy.cpu().numpy().astype('uint32')
6. 遍历检测结果并在图像上绘制边界框和标签
遍历所有检测到的目标,在图像上绘制边界框和标签,并记录每个类别的检测次数
for idx in range(len(bboxes_cls)):box_cls = int(bboxes_cls[idx])bbox_xyxy = bboxes_xyxy[idx]bbox_label = self.names[box_cls]class_counts[bbox_label] += 1box_conf = f"{bboxes_conf[idx]:.2f}"xmax, ymax, xmin, ymin = bbox_xyxy[2], bbox_xyxy[3], bbox_xyxy[0], bbox_xyxy[1]img_vis = cv2.rectangle(img_vis, (xmin, ymin), (xmax, ymax), get_color(box_cls + 2), 3)cv2.putText(img_vis, f'{str(bbox_label)}/{str(box_conf)}', (xmin, ymin - 10),cv2.FONT_HERSHEY_SIMPLEX, 1.0, get_color(box_cls + 2), 3)
7. 准备输入图像以适应End-to-end模型
对输入图像进行调整和预处理,以适应End-to-end模型的输入要求
img, ratio, pad = letterbox_for_img(image, new_shape=self.imgsz, auto=True)
pad_w, pad_h = pad
pad_w = int(pad_w)
pad_h = int(pad_h)
ratio = ratio[1]
img = np.ascontiguousarray(img)
img = transform(img).to(self.device)
im = img.float()
if im.ndimension() == 3:im = im.unsqueeze(0)
8. 使用YOLOP模型进行推理
在预处理后的图像上运行End-to-end模型,输出检测结果、车道线分割结果和可行驶区域分割结果
det_out, da_seg_out, ll_seg_out = self.model(im)
9. 处理可行驶区域分割结果
这段代码将对可行驶区域的分割结果进行后处理,首先从模型输出中裁剪出实际的分割结果,通过双线性插值恢复到原始图像尺寸,然后提取每个像素的类别索引,最终生成可行驶区域的分割掩码
_, _, height, width = im.shape
da_predict = da_seg_out[:, :, pad_h:(height - pad_h), pad_w:(width - pad_w)]
da_seg_mask = torch.nn.functional.interpolate(da_predict, scale_factor=int(1 / ratio), mode='bilinear')
_, da_seg_mask = torch.max(da_seg_mask, 1)
da_seg_mask = da_seg_mask.int().squeeze().cpu().numpy()
10. 处理车道线分割结果
这段代码将对车道线分割结果进行后处理,和处理可行驶区域分割结果同理,首先从模型输出中裁剪出实际的分割结果,并通过双线性插值恢复到原始图像尺寸,然后提取每个像素的类别索引,生成最终的分割掩码
ll_predict = ll_seg_out[:, :, pad_h:(height - pad_h), pad_w:(width - pad_w)]
ll_seg_mask = torch.nn.functional.interpolate(ll_predict, scale_factor=int(1 / ratio), mode='bilinear')
_, ll_seg_mask = torch.max(ll_seg_mask, 1)
ll_seg_mask = ll_seg_mask.int().squeeze().cpu().numpy()
二、效果展示


三、完整代码获取
链接:基于YOLOv10+YOLOP+PYQT的可视化系统,实现多类别目标检测+可行驶区域分割+车道线分割
总结
本期博客就到这里啦,喜欢的小伙伴们可以点点关注,感谢!
最近经常在b站上更新一些有关目标检测的视频,大家感兴趣可以来看看 https://b23.tv/1upjbcG
学习交流群:995760755
相关文章:
基于YOLOv10+YOLOP+PYQT的可视化系统,实现多类别目标检测+可行驶区域分割+车道线分割【附代码】
文章目录 前言视频效果必要环境一、代码结构1、 训练参数解析2、 核心代码解析1.初始化Detector类2. torch.no_grad()3. 复制输入图像并初始化计数器4. 调用YOLOv10模型进行目标检测5. 提取检测结果信息6. 遍历检测结果并在图像上绘制边界框和标签7. 准备输入图像以适应End-to-…...

计算机网络之令牌总线
上文内容:什么是以太网 1.令牌总线工作原理 在总线的基础上,通过在网络结点之间有序地传递令牌来分配各结点对共享型总线的访问权利,形成闭合的逻辑环路。 完全采用半双工的操作方式,只有获得令牌的结点才能发送信息ÿ…...

策略模式的应用
前言 系统有一个需求就是采购员审批注册供应商的信息时,会生成一个供应商的账号,此时需要发送供应商的账号信息(账号、密码)到注册填写的邮箱中,通知供应商账号信息,当时很快就写好了一个工具类࿰…...

如何使用uer做多分类任务
如何使用uer做多分类任务 语料集下载 找到这里点击即可 里面是这有json文件的 因此我们对此要做一些处理,将其转为tsv格式 # -*- coding: utf-8 -*- import json import csv import chardet# 检测文件编码 def detect_encoding(file_path):with open(file_path,…...

【HICE】转发服务器实验
1.在本地主机上操作 2.在客户端操作设置主机的IP地址为dns 3.测试,客户机是否能ping通...

MATLAB-分类CPO-RF-Adaboost冠豪猪优化器(CPO)优化RF随机森林结合Adaboost分类预测(二分类及多分类)
MATLAB-分类CPO-RF-Adaboost冠豪猪优化器(CPO)优化RF随机森林结合Adaboost分类预测(二分类及多分类) 分类CPO-RF-Adaboost冠豪猪优化器(CPO)优化RF随机森林结合Adaboost分类预测(二分类及多分类…...
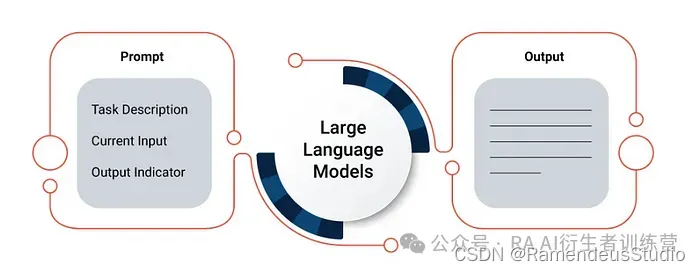
绝区贰--及时优化降低 LLM 成本和延迟
前言 大型语言模型 (LLM) 为各行各业带来了变革性功能,让用户能够利用尖端的自然语言处理技术处理各种应用。然而,这些强大的 AI 系统的便利性是有代价的 — 确实如此。随着 LLM 变得越来越普及,其计算成本和延迟可能会迅速增加,…...

JDBC【封装工具类、SQL注入问题】
day54 JDBC 封装工具类01 创建配置文件 DBConfig.properties driverNamecom.mysql.cj.jdbc.Driver urljdbc:mysql://localhost:3306/qnz01?characterEncodingutf8&serverTimezoneUTC usernameroot passwordroot新建配置文件,不用写后缀名 创建工具类 将变…...

Windows打开redis以及Springboot整合redis
目录 前言Windows系统打开redisSpringboot整合redis依赖实体类yml配置文件config配置各个数据存储类型分别说明记录string数据写入redis,并查询通过命令行查询 list插入数据到redis中从redis中读取命令读取数据 hash向redis中逐个添加map键值对获取key对应的map中所…...

MySQL使用LIKE索引是否失效的验证
1、简单的示例展示 在MySQL中,LIKE查询可以通过一些方法来使得LIKE查询能够使用索引。以下是一些可以使用的方法: 使用前导通配符(%),但确保它紧跟着一个固定的字符。 避免使用后置通配符(%)&…...
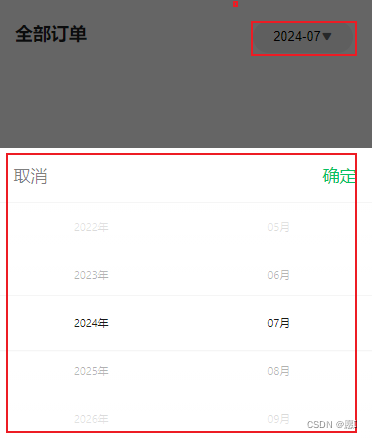
封装日历uniapp,只显示年月不显示日
默认展示最新日期 子组件 <template><view class"date-picker"><picker mode"date" fields"month" change"onDateChange" :value"selectedDate"><view class"picker">{{ selectedDate…...
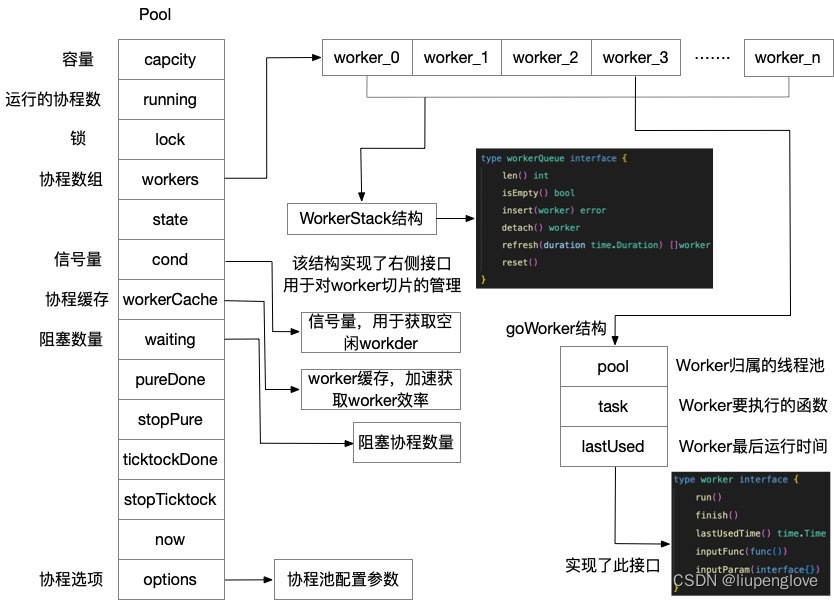
golang线程池ants-实现架构
1、总体架构 ants协程池,在使用上有多种方式(使用方式参考这篇文章:golang线程池ants-四种使用方法),但是在实现的核心就一个,如下架构图: 总的来说,就是三个数据结构: Pool、WorkerStack、goW…...
Mysql面试合集
概念 是一个开源的关系型数据库。 数据库事务及其特性 事务:是一系列的数据库操作,是数据库应用的基本逻辑单位。 事务特性: (1)原子性:即不可分割性,事务要么全部被执行,要么就…...
: 构建变体与自定义任务)
Android Gradle 开发与应用 (五): 构建变体与自定义任务
目录 1. 概述 2. 构建变体 2.1 构建变体的概念 2.2 构建类型 2.3 产品风味 2.4 构建变体的使用 3. 自定义任务 3.1 自定义任务的概念 3.2 创建自定义任务 3.3 配置任务依赖 3.4 任务类型 3.5 动态任务 3.6 自定义任务执行顺序 4. 案例 4.1 多渠道打包 4.2 自动…...

Django学习第六天
启动项目命令 python manage.py runserver 取消模态框功能 js实现列表数据删除 第二种实现思路 使用jquery修改模态框标题 编辑页面拿到数据库数据显示默认数据功能实现 想要去数据库中获取数据时:对象/字典 三种不同的数据类型 使用Ajax传入数据实现表单编辑&…...

docker部署mycat,连接上面一篇的一主二从mysql
一、docker下载mycat镜像 查看安装结果 这个名称太长,在安装容器时不方便操作,设置标签为mycat docker tag longhronshens/mycat-docker mycat 二、安装容器 先安装一个,主要目的是获得配置文件 docker run -it -d --name mycat -p 8066:…...

VUE2拖拽组件:vue-draggable-resizable-gorkys
vue-draggable-resizable-gorkys组件基于vue-draggable-resizable进行二次开发, 用于可调整大小和可拖动元素的组件并支持冲突检测、元素吸附、元素对齐、辅助线 安装: npm install --save vue-draggable-resizable-gorkys 全局引用: import Vue from vue import vdr fro…...

容器:stack
以下是关于stack容器的一些总结: stack容器比较简单,主要包括: 1、构造函数:stack [staName] 2、添加、删除元素: push() 、pop() 3、获取栈顶元素:top() 4、获取栈的大小:size() 5、判断栈是否为空&#x…...
跨平台Ribbon UI组件QtitanRibbon全新发布v6.7.0——支持Qt 6.6.3
没有Microsoft在其办公解决方案中提供的界面,就无法想象现代应用程序,这个概念称为Ribbon UI,目前它是使应用程序与时俱进的主要属性。QtitanRibbon是一款遵循Microsoft Ribbon UI Paradigm for Qt技术的Ribbon UI组件,QtitanRibb…...
 深入探索Python-Pandas库的核心数据结构:DataFrame全面解析)
(6) 深入探索Python-Pandas库的核心数据结构:DataFrame全面解析
目录 前言1. DataFrame 简介2. DataFrame的特点3. DataFrame的创建3.1 使用字典创建DataFrame3.2 使用列表的列表(或元组)创建DataFrame3.3 使用NumPy数组创建DataFrame3.4 使用Series构成的字典创建DataFrame3.5 使用字典构成的字典创建DataFrame 4. 从…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...
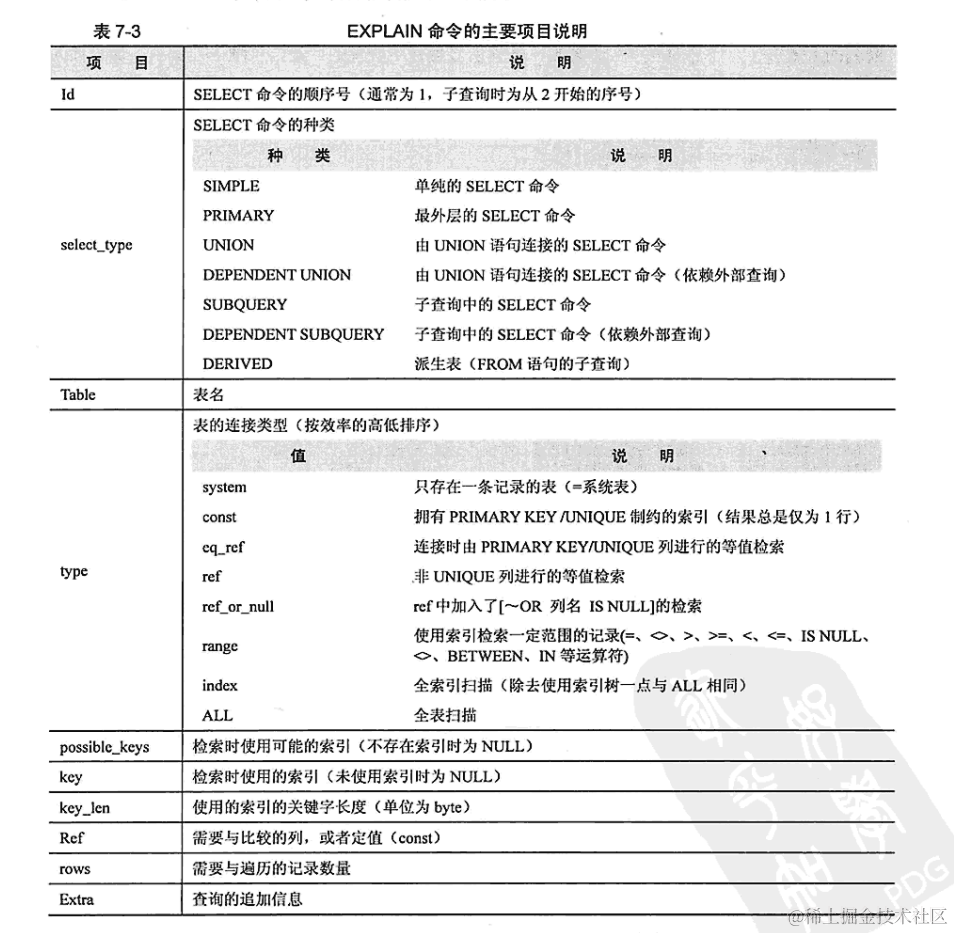
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

Linux服务器被挖矿木马劫持的五步应急处置指南
1. 这不是“中病毒”,是服务器被劫持成了矿机——先别慌,但必须立刻断网“服务器被黑客攻击,用来挖矿!”——这句话在运维圈里一出,比收到OOM告警还让人头皮发紧。它不像网页被挂马、数据库被拖库那样有明显业务影响&a…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

基于STM32与LoRa的低功耗物联网气象站DIY全攻略
1. 项目概述:打造一个低功耗的家庭气象站前阵子想给家里的智能家居系统加点“环境感知”能力,琢磨着搞个能实时监测室外温湿度、风速风向的小玩意儿。市面上成品气象站要么数据出不来,要么功耗感人,不适合长期户外部署。于是&…...

基于Cynthion逆向USB协议,为DP100电源开发Linux控制软件
1. 项目概述:用Cynthion嗅探USB,为DP100电源打造Linux软件作为一名长期在Linux环境下折腾硬件和嵌入式开发的爱好者,我经常遇到一个头疼的问题:很多不错的桌面小设备,比如电源、示波器、逻辑分析仪,它们的官…...

从无线破解到PDF解密:盘点那些容易被忽略的‘非主流’密码审计场景与工具
密码安全审计的隐秘战场:从无线网络到加密文档的实战指南 当大多数人谈论密码安全时,脑海中浮现的往往是服务器登录、数据库访问这些企业级场景。然而在数字生活的每个角落,从家庭Wi-Fi到工作文档,密码保护的脆弱性同样可能成为安…...

如何在Windows上轻松查看和转换iPhone HEIF图片:HEIF实用工具指南
如何在Windows上轻松查看和转换iPhone HEIF图片:HEIF实用工具指南 【免费下载链接】HEIF-Utility HEIF Utility - View/Convert Apple HEIF images on Windows. 项目地址: https://gitcode.com/gh_mirrors/he/HEIF-Utility HEIF Utility是一款专为Windows用户…...

保姆级教程:用Cesium ClippingPlaneCollection实现3D地形‘开窗’与‘遮罩’效果
三维地理可视化进阶:Cesium裁剪平面实现区域聚焦与隐藏的艺术 在三维地理信息系统中,有时我们需要突出显示特定区域或隐藏某些部分以查看地下结构——这就像给地球表面开一扇"窗户"或盖一块"遮罩"。Cesium引擎的ClippingPlaneCollec…...

3步掌握OBS多平台直播:obs-multi-rtmp从零到精通的完整攻略
3步掌握OBS多平台直播:obs-multi-rtmp从零到精通的完整攻略 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 你是否曾为同时向多个平台直播而烦恼?传统方法需要重…...