Open3D 点云的圆柱形邻域搜索
目录
一、概述
1.1原理
1.2应用
二、代码实现
2.1完整代码
2.2程序说明
三、实现效果
3.1原始点云
3.2搜索后点云
一、概述
1.1原理
圆柱邻域搜索的基本思想是确定点云中的哪些点位于给定圆柱的内部。一个圆柱可以由以下几个参数定义:
- 中心点:圆柱底面的中心。
- 轴向量:圆柱的中心轴方向。
- 半径:圆柱的半径。
- 高度:圆柱的高度。
计算步骤:

1.2应用
圆柱邻域搜索是一种几何查询方法,用于在点云数据中查找与给定圆柱相交的点。该方法广泛应用于以下领域:
- 三维形状分析:用于识别和分析点云数据中的圆柱形状特征,如管道、圆柱形建筑结构等。
- 机器人导航:帮助机器人理解其周围环境的几何结构,以便在复杂的三维空间中导航。
- 工业检测:用于检测和测量工业环境中的圆柱形物体,如管道的直径、表面缺陷等。
- 计算机视觉:在3D重建和场景理解中,圆柱邻域搜索可以帮助识别和分割特定的几何形状。
二、代码实现
2.1完整代码
import open3d as o3d
import numpy as np
import matplotlib.pyplot as pltdef cylinder_neighborhood_search(pcd, center, axis, radius, height):"""计算点云中位于指定圆柱形领域内的点。参数:- pcd: open3d.geometry.PointCloud 对象- center: 圆柱中心点(numpy数组)- axis: 圆柱轴向量(numpy数组)- radius: 圆柱半径- height: 圆柱高度返回:- cylinder_points: 位于圆柱形领域内的点的索引"""points = np.asarray(pcd.points)axis = axis / np.linalg.norm(axis) # 规范化轴向量# 计算每个点到圆柱轴的距离vec = points - centerproj_len = np.dot(vec, axis)proj_points = center + np.outer(proj_len, axis)dist_to_axis = np.linalg.norm(points - proj_points, axis=1)# 计算每个点沿轴向的投影长度height_projection = np.dot(vec, axis)# 选择符合条件的点mask = (dist_to_axis <= radius) & (height_projection >= 0) & (height_projection <= height)cylinder_points = np.where(mask)[0]return cylinder_points# 读取点云数据
pcd = o3d.io.read_point_cloud("happy buddha.pcd")# 随机选择一个点作为圆柱中心点
points = np.asarray(pcd.points)
# random_index = np.random.randint(0, len(points))
center = points[1]
#
# 定义圆柱形领域的参数
axis = np.array([0, 1, 0]) # 圆柱轴向量
radius = 0.02 # 圆柱半径
height = 1000 # 圆柱高度# 获取圆柱形领域内的点
cylinder_indices = cylinder_neighborhood_search(pcd, center, axis, radius, height)# 提取圆柱形领域内的点云
cylinder_pcd = pcd.select_by_index(cylinder_indices)# 设置颜色用于区分原始点云和圆柱形领域点云
colors = np.zeros((len(pcd.points), 3))
colors[:, 0] = 1 # 原始点云颜色设为红色
colors[cylinder_indices, :] = [0, 1, 0] # 圆柱形领域点云颜色设为绿色# 应用颜色到原始点云
pcd.colors = o3d.utility.Vector3dVector(colors)# 可视化原始点云和圆柱形领域点云
o3d.visualization.draw_geometries([pcd, cylinder_pcd])
2.2程序说明
- 圆柱形邻域搜索函数:cylinder_neighborhood_search函数接收点云、圆柱的中心、轴向量、半径和高度作为参数。通过计算每个点到圆柱轴的距离和点在轴向上的投影长度来判断点是否在圆柱形领域内。
- 读取点云数据:使用o3d.io.read_point_cloud函数读取点云数据。
- 定义圆柱形领域的参数:圆柱的中心、轴向量、半径和高度。
- 获取圆柱形领域内的点:使用自定义的圆柱形邻域搜索函数获取圆柱形领域内的点索引。
- 提取圆柱形领域内的点云:使用select_by_index函数提取圆柱形领域内的点云。
- 设置颜色用于区分原始点云和圆柱形领域点云:原始点云设置为红色,圆柱形领域内的点云设置为绿色。
- 可视化:使用o3d.visualization.draw_geometries函数同时可视化原始点云和圆柱形领域点云。
三、实现效果
3.1原始点云

3.2搜索后点云

相关文章:
Open3D 点云的圆柱形邻域搜索
目录 一、概述 1.1原理 1.2应用 二、代码实现 2.1完整代码 2.2程序说明 三、实现效果 3.1原始点云 3.2搜索后点云 一、概述 1.1原理 圆柱邻域搜索的基本思想是确定点云中的哪些点位于给定圆柱的内部。一个圆柱可以由以下几个参数定义: 中心点:…...
python如何设计窗口
PyQt是一个基于Qt的接口包,可以直接拖拽控件设计UI界面,下面我简单介绍一下这个包的安装和使用,感兴趣的朋友可以自己尝试一下: 1、首先,安装PyQt模块,这个直接在cmd窗口输入命令“pip install pyqt5”就行…...

C语言获取当前时间
一共有两段代码,一个是获取当前时间,一个是获取到现在的总毫秒数 求关注😄 互粉必回 获取当前时间 #include <stdio.h> #include <time.h> int main() { time_t rawtime; struct tm * timeinfo; char buffer[20]; // 获取当前…...

【每日一练】python三目运算符的用法
""" 三目运算符与基础运算的对比 """ a 1 b 2#1.基础if运算判断写法: if a > b:print("基础判断输出:a大于b") else:print("基础判断输出: a不大于b")#2.三目运算法判断:…...
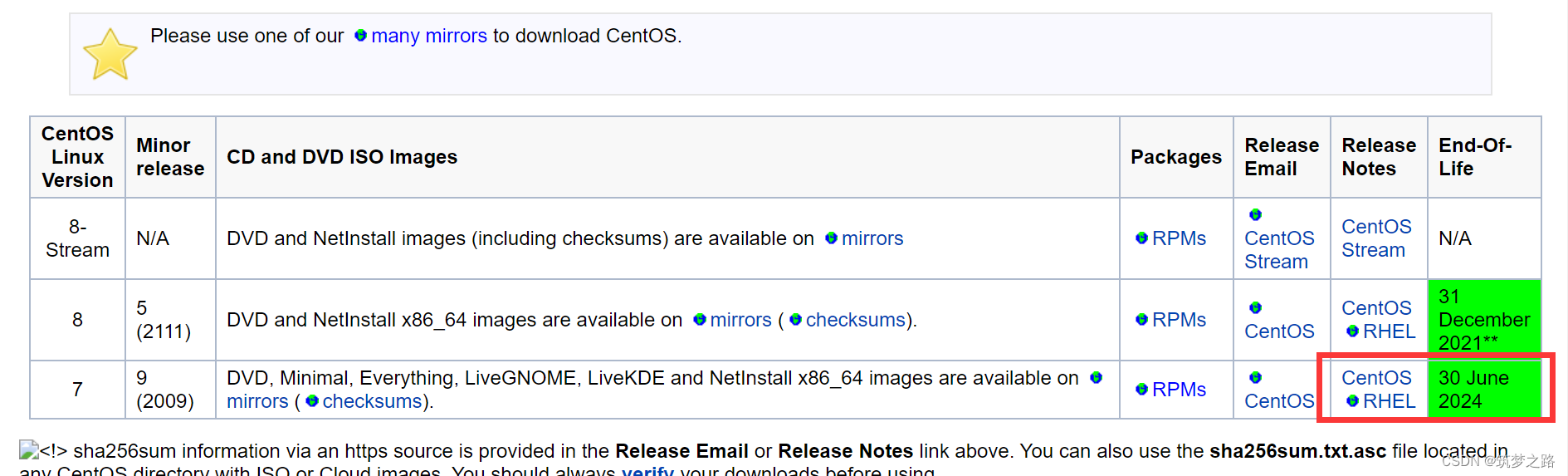
CentOS 7.9 停止维护(2024-6-30)后可用在线yum源 —— 筑梦之路
众所周知,centos 7 在2024年6月30日,生命周期结束,官方不再进行支持维护,而很多环境一时之间无法完全更新替换操作系统,因此对于yum源还是需要的,特别是对于互联网环境来说,在线yum源使用方便很…...

Git 常用命令备忘
1、删除 (1)、git push origin --delete dev 删除远程分支 (2)、git branch -d dev 删除本地分支 git branch -D dev 强制删除本地分支 2、创建分支 (1)、git checkout -b dev 创建本地分支 (2)、git push origin dev 创建远程分支,此时本地分支与远程…...

Ubuntu24.04安装Skynet环境
安装依赖 sudo apt-get -y install gcc sudo apt-get -y install g sudo apt-get -y install make sudo apt-get install -y autoconf automake libtool sudo apt-get install -y git 或者可以用: sudo apt-get -y install gcc g make autoconf automake libtool…...

【C++】cout.self()函数
📢博客主页:https://blog.csdn.net/2301_779549673 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! 📢本文作为 JohnKi 学习笔记,借鉴了部分大佬案例 📢未来很长&#…...

VueQuill 富文本编辑器技术文档快速上手
VueQuill 富文本编辑器技术文档 1. 安装 VueQuill2. 配置 VueQuill3. 在组件中使用 VueQuill4. 配置选项5. 事件处理6. 数据格式7. 自定义工具栏8. 示例项目结构9. 常见问题如何添加图片上传功能?如何自定义编辑器主题? 在此之前,我讲解过关于…...

链式二叉树oj题
1.输入k ,找第k层节点个数 int TreeKlevel(BTNode*root,int k) {if (root NULL) {return 0;}if (k 1) {return 1;}return TreeKlevel(root->left, k - 1)TreeKlevel(root->right, k - 1); } 在这里我们要确定递归子问题,第一个就是NULL时返回&…...

Curator 是一个开源工具为 Elasticsearch 集群设计,用于自动化索引的维护任务。
Elasticsearch 使用 Curator 进行索引生命周期管理是一种常见的做法,Curator 是一个开源的 Python 工具,专为 Elasticsearch 集群设计,用于自动化索引的维护任务。以下是使用 Curator 进行索引生命周期管理的一些关键步骤和概念: …...
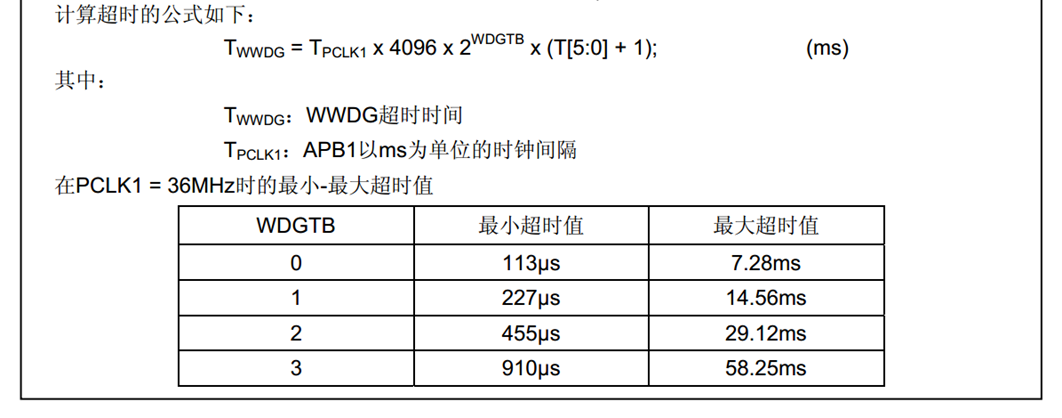
STM32-PWR和WDG看门狗
本内容基于江协科技STM32视频学习之后整理而得。 文章目录 1. PWR1.1 PWR简介1.2 电源框图1.3 上电复位和掉电复位1.4 可编程电压监测器1.5 低功耗模式1.6 模式选择1.7 睡眠模式1.8 停止模式1.9 待机模式1.10 库函数 2. WDG看门狗2.1 WDG简介2.2 IWDG框图2.3 IWDG键寄存器2.4 …...

C++循环队列 经典示例
循环队列(Circular Queue),又称环形缓冲区,是一种常用的数据结构,特别适用于资源有限的场合,比如操作系统中的任务调度、网络数据缓冲等。循环队列在数组的基础上实现,逻辑上首尾相连࿰…...

【程序大侠传】大表分库分表切换数据库类型导致pagehelper生成sql语法报错
前序 代码剑宗等级分明,其门下弟子等级划分如下: 入门弟子 刚刚拜入代码剑宗,学习基础编程语言和基本剑法(语法和基础概念)。他们的代码还显得生涩,但已经开始展现出对优雅代码的追求。 江湖小虾 初步掌握…...

7、Redis 队列与 Stream
引言 Redis 自 5.0 版本起引入了一种新的数据结构——Stream。这种数据结构不仅增加了 Redis 的数据处理能力,还使其在消息队列和数据流处理方面更具竞争力。Stream 提供了持久化、多播、消费组等功能,可以满足多种复杂的数据处理需求。 1. Redis Stre…...

FFT剖析
快速傅里叶变换 (fast Fourier transform) xn{x0,x1,…xn-1} (num:N) 旋转因子系数: d2pik/N 旋转因子 wk(n)(cos(dn)isin(dn)) n[0,N-1] y(k) sum(x(n)wk(n),0,N-1) y(k){y(0),y(1),…y(N-1)} 傅里叶级数 x(n)wk(n)的级数是: 1.d2pik/N 这个系数决…...

git clone报错RPC failed; curl 92 HTTP/2 stream 7 was not closed cleanly
问题描述 git clone github上的项目报错: RPC failed; curl 92 HTTP/2 stream 7 was not closed cleanly: CANCEL (err 8) 4796 bytes of body are still expected fetch-pack: unexpected disconnect while reading sideband packet early EOF fetch-pack: invalid index-pac…...

Apispec,一个用于生成 OpenAPI(Swagger)规范的 Python 库
目录 01什么是 Apispec? 为什么选择 Apispec? 安装与配置 02Apispec 的基本用法 生成简单的 API 文档 1、创建 Apispec 实例 2、定义 API 路由和视图 3、添加路径到 Apispec 集成 Flask 和 Apispec 1、安装…...

SpringBoot 自定义异常返回数据格式
Spring Boot 默认异常处理 当我们用 spring boot 开发接口是,当遇到异常时返回的数据格式是如下形式的 {"timestamp": "2024-07-06T02:48:55.79100:00","status": 404,"error": "Not Found","path":…...
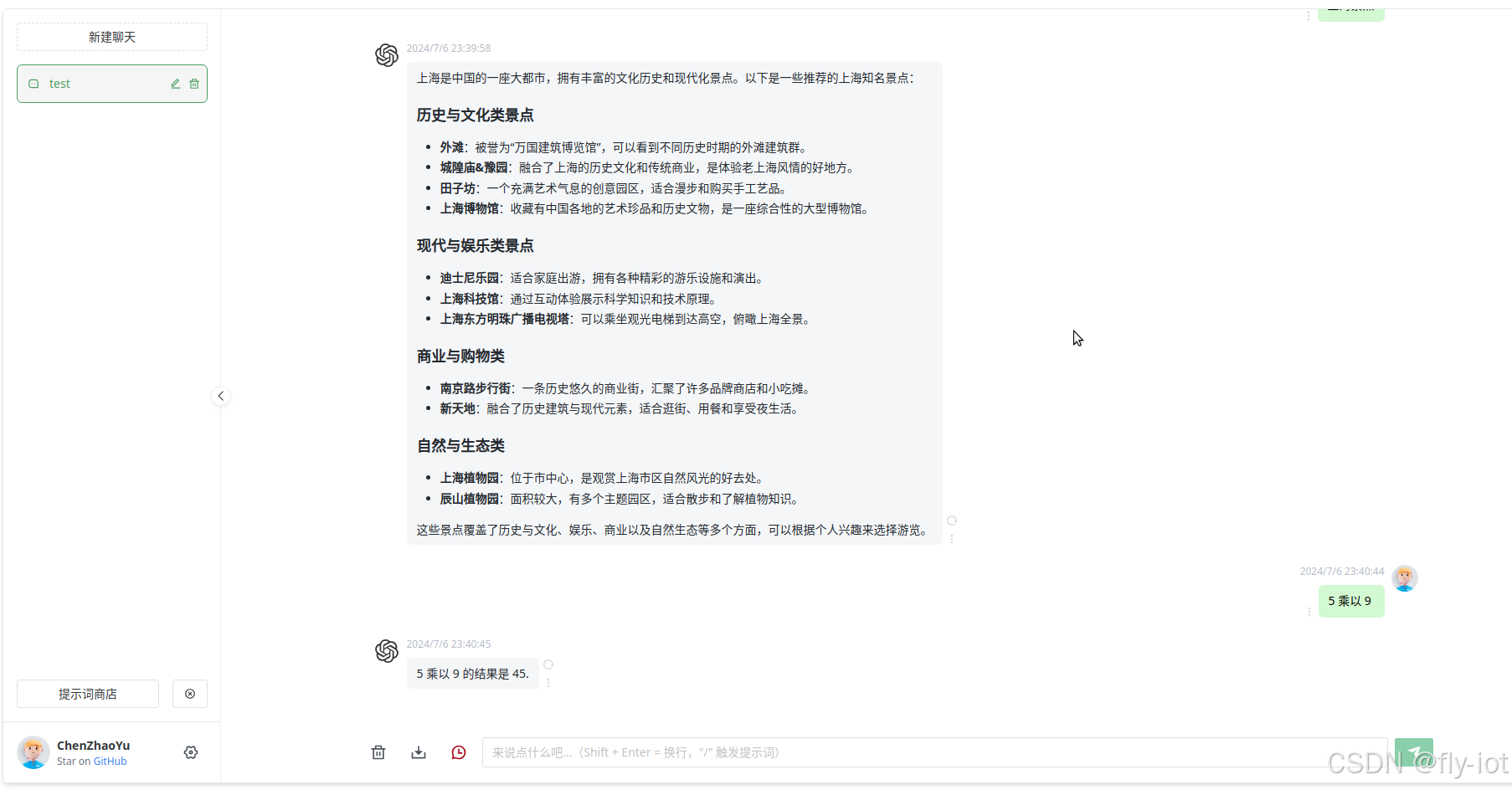
【xinference】(15):在compshare上,使用docker-compose运行xinference和chatgpt-web项目,配置成功!!!
视频演示 【xinference】(15):在compshare上,使用docker-compose运行xinference和chatgpt-web项目,配置成功!!! 1,安装docker方法: #!/bin/shdistribution$(…...

第7章 Mosquitto增加SSL/TLS加密通信
第7章 SSL/TLS加密通信 7.1 TLS基础 #mermaid-svg-GnHmiOrEfRuPOevS{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mer…...

01_Neo4j知识体系之原生图数据库架构全景与技术定位
01_Neo4j知识体系之原生图数据库架构全景与技术定位 体系 基础概念层:原生图数据库定位、属性图模型、索引自由邻接、与关系型数据库对比延伸阅读方向:Cypher 查询、图数据科学、向量索引、GraphRAG、企业级集群适用对象:架构师、数据平台负…...

linux——PV操作
int semop(int semid ,struct sembuf *sops ,size_t nsops); //用户改变信号量的值。也就是使用资源还是释放资源使用权 包含头文件: include<sys/sem.h> 参数: semid : 信号量的标识码。也就是semget()的返回值 sops是一…...

告别手动敲命令:用Rancher 2.9.2的Web界面,5分钟搞定K8S 1.26集群的Nginx部署
告别手动敲命令:用Rancher 2.9.2的Web界面,5分钟搞定K8S 1.26集群的Nginx部署 在Kubernetes的世界里,部署一个简单的Nginx服务往往需要编写复杂的YAML文件,记忆各种kubectl命令参数,这对于刚接触K8S的开发者或小型运维…...

保姆级教程:用Cadence Virtuoso从零搭建0.18um工艺的Bandgap基准电路
从零构建0.18μm工艺带隙基准电路的实战指南 在模拟集成电路设计中,带隙基准电压源(Bandgap Reference)堪称"电路设计皇冠上的明珠"。它能为各类芯片提供与温度、电源电压几乎无关的稳定参考电压,是ADC、DAC、LDO等模块的核心基础。本文将带您…...

智能家居集成新方案:Home Assistant与小米设备的跨平台控制实现
智能家居集成新方案:Home Assistant与小米设备的跨平台控制实现 【免费下载链接】ha_xiaomi_home Xiaomi Home Integration for Home Assistant 项目地址: https://gitcode.com/GitHub_Trending/ha/ha_xiaomi_home 【突破生态限制】智能家居跨平台集成方案 …...

2026届学术党必备的六大AI写作网站推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 削减AIGC率,这意味着要去降低文本之中,那些可被辨别为系人工智能生成…...

Xinference 集群部署实战:从零到生产环境的完整指南
1. 为什么选择Xinference集群? 在AI模型推理领域,我们常常面临两个核心痛点:单机性能瓶颈和资源利用率低下。想象一下,你正在运行一个大型语言模型,每次推理都要等待十几秒,同时GPU利用率却只有30%左右——…...

D3KeyHelper:重新定义暗黑3操作体验的智能辅助工具
D3KeyHelper:重新定义暗黑3操作体验的智能辅助工具 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 一、价值定位:三大创新突破…...

Pi0 VLA模型快速上手:三视角图像上传+中文指令生成6自由度动作
Pi0 VLA模型快速上手:三视角图像上传中文指令生成6自由度动作 想象一下,你面前有一个机器人,你只需要给它看三张不同角度的照片,然后用中文告诉它“把那个红色的方块拿过来”,它就能自己计算出每个关节该怎么动&#…...