demon drone 200无人机标定流程
demon drone 200无人机标定流程
- 一、飞控固件更新
- 1.1 固件更新
- 1.2 参数更新
- 二、imu标定
- 2.1 安装imu标定工具(在你自己的电脑上)
- 2.2 录制rosbag(在对应飞机上)
- 2.3 运行标定程序(在你自己的电脑上)
- 三、双目及imu联合标定
- 3.1 安装标定工具(参考2.1)
- 3.2 录制rosbag
- 3.3 运行标定程序
- 3.4 注意事项
- 四、程序参数更新
一、飞控固件更新
飞控固件按需更新。参考QQ群:562983648,官方说明
1.1 固件更新
需要按照要求更新1.13.3对应的bootloader和固件。
1.2 参数更新
刷新参数,并重新标定传感器。
二、imu标定
2.1 安装imu标定工具(在你自己的电脑上)
# 我的这个git库中包含了imu标定和相机标定程序
git clone https://gitee.com/nankel/kalibr_workspace.git
cd kalibr_workspace
catkin_make
注意:可能会出错,src中code_utils和imu_utils有顺序要求,可以忽略错误多次catkin_make。详细内容可以参考我之前的博客D435i标定摄像头和IMU笔记三(IMU标定篇)中的港科大标定方法。
注意:不要忘了将setup.bash加入~/.bashrc中。
2.2 录制rosbag(在对应飞机上)
# 1、启动mavros
roslaunch mavros px4.launch# 2、确认imu频率。确保imu发送频率大于200Hz,本无人机一般为250Hz。
rostopic hz /mavros/imu/data_raw# 3、静止不动30分钟(事实上几分钟也行,最好久一点),录制rosbag。会在当前路径生成imu.bag文件
rosbag record -O imu /mavros/imu/data_raw# 4、将rosbag复制到运行标定程序的电脑。U盘复制或者局域网scp复制
2.3 运行标定程序(在你自己的电脑上)
1)修改程序配置
launch路径:kalibr_workspace/src/imu_utils/launch/nankel_imuCali.launch
内容及注释如下:
<launch><node pkg="imu_utils" type="imu_an" name="imu_an" output="screen"><param name="imu_topic" type="string" value= "/mavros/imu/data_raw"/> <!-- imu话题名 --><param name="imu_name" type="string" value= "demon_mini_imu"/> <!-- imu名,随便改 --><param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/> <!-- 标定数据保存地址 --><param name="max_time_min" type="int" value= "30"/> <!-- 标定最短时长(分钟),可以自行更改,要比实际录制短,要不然不会停--><param name="max_cluster" type="int" value= "100"/></node>
</launch>
注意:按照此脚本,结果文件将保存于kalibr_workspace/src/imu_utils/data中
2)运行程序
# 1、运行程序
roslaunch imu_utils nankel_imuCali.launch
# 2、400倍速播放rosbag
rosbag play -r 400 imu.bag
3)保存标定参数
新建imu.yaml文件,后面联合标定会用到,里面的数据更新为标定数据:
rostopic: /mavros/imu/data_raw
update_rate: 250.0 #Hzgyroscope_noise_density: 0.00302857381362
gyroscope_random_walk: 3.00373059934e-05accelerometer_noise_density: 0.0272600517598
accelerometer_random_walk: 0.000579817988633
三、双目及imu联合标定
3.1 安装标定工具(参考2.1)
3.2 录制rosbag
# 1、启动双目程序
roslaunch stereo stereo.launch
# 2、启动mavros
roslaunch mavros px4.launch# 3、录制rosbag(录制过程要上下左右前后各运动两次)
rosbag record -O stereo_imu /mavros/imu/data_raw /stereo/left/image_raw /stereo/right/image_raw# 4、将rosbag复制到运行标定程序的电脑。U盘复制或者局域网scp复制
注意:如果想要弹出双目图像,可以使用rviz观看图像。或者修改配置demon_drone_ws/src/stereo/launch/stereo_config.yaml中if_show_orig: 1。
注意:建议使用台式电脑,不然标定时长将会很久。
3.3 运行标定程序
也可以参考我之前的博客:D435i标定摄像头和IMU笔记四-2(双目摄像头与IMU联合标定篇)
1、准备标定板文件checkerboard.yaml
target_type: 'checkerboard' #gridtype
targetCols: 5 # 标定板内角数量(列)
targetRows: 8 # 标定板内角数量(行)
rowSpacingMeters: 0.045 #size of one chessboard square [m]
colSpacingMeters: 0.045 #size of one chessboard square [m]
2、运行标定程序
# 1、标定双目相机
kalibr_calibrate_cameras --target checkerboard.yaml --bag stereo_imu.bag --models pinhole-radtan pinhole-radtan --topics /stereo/left/image_raw /stereo/right/image_raw# 2、联合标定双目相机和imu(要等待双目标定结束)
kalibr_calibrate_imu_camera --target checkerboard.yaml --cam camchain-stereo_imu.yaml --imu imu/imu.yaml --bag stereo_imu.bag
3、标定结果文件:results-imucam-imu_stereo.txt:
3.4 注意事项
注意:
1、观察相机标定误差,一般在1个像素以内。
2、观察联合标定误差,一般2个像素以内。
3、imu和相机时差一般是负数0~-0.06以内。
四、程序参数更新
1、将标定文件results-imucam-imu_stereo.txt复制到/home/khadas/demon_packages/demon_drone_ws/src/stereo/launch/results-imucam-stereo_imu.txt下。
2、运行自动更新脚本
cd /home/khadas/demon_packages/demon_drone_ws/src/stereo/launch && python3 config.py
3、移动配置文件
移动vins所需文件:可见/home/khadas/demon_packages/demon_drone_ws/src/VINS-Fusion/config/stereo中文件
4、大功告成,运行程序:可见脚本/home/khadas/demon_packages/demon_drone_ws/scipts/fpv_ego.sh
相关文章:

demon drone 200无人机标定流程
demon drone 200无人机标定流程 一、飞控固件更新1.1 固件更新1.2 参数更新 二、imu标定2.1 安装imu标定工具(在你自己的电脑上)2.2 录制rosbag(在对应飞机上)2.3 运行标定程序(在你自己的电脑上) 三、双目及imu联合标定3.1 安装标…...

案例开发-日程管理-第一期
九 案例开发-日程管理-第一期 共7期 9.1 登录页及校验 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>Title</title><style>.ht{text-align: center;color: cadetblue;font-family: 幼…...

【Java 注解,自定义注解,元注解,注解本质,注解解析】
文章目录 什么是注解?Java内置注解自定义注解元注解注解的本质注解解析 什么是注解? 注解是Java编程语言中的一种元数据,提供了有关程序的额外信息。注解以符号开始,紧跟着注解的名称和一对括号,括号内包含注解的参数…...

染色法判定二分图
什么是二分图? 二分图,也称作二部图,是图论中的一种特殊模型。在一个无向图G(V,E) 中,如果顶点集合 V 可以被分割成两个互不相交的子集 A 和 B,并且图中的每条边 (i,j) 关联的两个顶点 i 和 j 分别属于这两个不同的顶…...

自动气象站的主要功能优势
在科技日新月异的今天,我们生活的方方面面都受到了科技的影响。其中,自动气象站作为气象观测领域的重要一环,不仅提升了气象数据的准确性和时效性,还为我们的日常生活、农业生产、灾害预防等提供了重要的数据支持。 自动气象站概述…...

Java中实现二维数组(矩阵)的转置
在矩阵运算中,矩阵的转置是一个基本操作,即将矩阵的行变成列,列变成行。在Java中,我们可以通过编写一个方法来实现二维数组的转置。下面,我将详细介绍如何在Java中完成这一任务,并提供完整的代码示例。 编…...

Prometheus+Grafana主机运行数据
目录 介绍 安装Node Exporter 配置Prometheus 验证配置 导入仪表盘 介绍 Prometheus是一款开源的监控和警报工具,而Node Exporter是Prometheus的一个官方插件,用于采集主机上的各种系统和硬件指标。 安装Node Exporter 下载最新版本的Node Export…...

GraphQL在Postman中:释放API查询的强大潜能
🚀 GraphQL在Postman中:释放API查询的强大潜能 Postman作为API开发和测试的领先工具,对GraphQL的支持为开发者提供了一种新的方式来查询和管理数据。GraphQL是一种查询语言,用于API,允许客户端明确指定他们需要哪些数…...

大语言模型里的微调vs RAG vs 模板提示词
文章目录 介绍微调(Fine-tuning)定义优点:缺点:应用场景:技术细节 检索增强生成(RAG,Retrieval-Augmented Generation)定义优点:缺点:应用场景:技…...

网络编程:常用网络测试工具
telnet netstat ping arp wireshark(网络抓包工具) tcpdumpssh2 secure crt ——软件工具sudo ufw disable sudo apt-get install openssh-server openssh-client //两个命令敲完 得重启sudo apt-get install wireshark 1、telnet 远程登录工具&…...

mov视频怎么改成mp4?把mov改成MP4的四个方法
mov视频怎么改成mp4?选择合适的视频格式对于确保内容质量和流通性至关重要。尽管苹果公司的mov格式因其出色的视频表现备受赞誉,但在某些情况下,它并非最佳选择,因为使用mov格式可能面临一些挑战。MP4格式在各种设备(如…...

力扣1472.设计浏览器历史记录
力扣1472.设计浏览器历史记录 用双指针记录历史记录 以及栈顶高度移动时会直接把之前的记录消掉 class BrowserHistory {int pos-1;int top0;string history[5010];public:BrowserHistory(string homepage) {visit(homepage);}void visit(string url) {pos ;top pos;histor…...

准大一新生开学千万要带证件照用途大揭秘
1、提前关注好都有哪些考场,以及这些考场大致在网页的哪个位置。比如我选对外经贸大学,我就直接找到第二个点进去。 2、电脑上同时开了谷歌浏览器和IE浏览器,以及手机也登陆了。亲测下来,同一时间刷新,谷歌浏览器能显示…...

QImage显示图片像素
在Qt中,QImage 类是用来表示和处理图像的。如果你想查看或显示一个图片的像素数据,你可以使用 QImage 提供的方法来访问这些数据。以下是一些基本的方法来获取和显示图片的像素信息: 获取图像的像素格式: 使用 QImage::format() …...
uniapp使用高德地图(公众号+h5)
选择微信小程序的话后果就是你的地图出不来,出来了就报key异常 下面直接放配置和代码: 打包后的高德uni-app,uniCloud,serverless,高德地图,申请高德地图Key,配置使用高德地图,参数说明,高德开放平台用户名,百度地图,申请百度地图Key,配置使用百度地图,…...

深度学习与浅层学习:技术变革下的竞争态势
深度学习与浅层学习:技术变革下的竞争态势 在过去十年中,深度学习的崛起对整个人工智能领域产生了巨大影响,几乎在各种任务中显示出超越传统浅层学习方法的性能。这种变化不仅推动了技术的进步,还对硬件市场,尤其是显…...

LeetCode 219. 存在重复元素 II
LeetCode 219. 存在重复元素 II 给你一个整数数组 nums 和一个整数 k ,判断数组中是否存在两个 不同的索引 i 和 j ,满足 nums[i] nums[j] 且 abs(i - j) < k 。如果存在,返回 true ;否则,返回 false 。 示例 1&am…...

【目标检测】使用自己的数据集训练并预测yolov8模型
1、下载yolov8的官方代码 地址: GitHub - ultralytics/ultralytics: NEW - YOLOv8 🚀 in PyTorch > ONNX > OpenVINO > CoreML > TFLite 2、下载目标检测的训练权重 yolov8n.pt 将 yolov8n.pt 放在ultralytics文件夹下 3、数据集分布 注…...
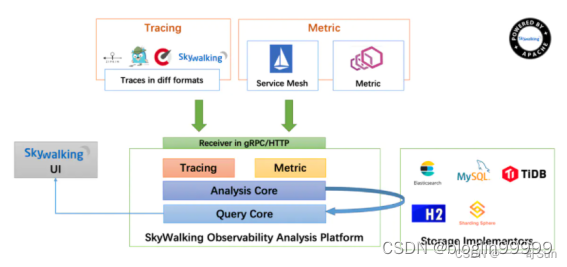
应用监控SkyWalking调研
参考: 链路追踪( Skyworking )_skywalking-CSDN博客 企业级监控项目Skywalking详细介绍,来看看呀-CSDN博客 SkyWalking 极简入门 | Apache SkyWalking 使用 SkyWalking 监控 ClickHouse Server | Apache SkyWalking https://zhuanlan.zhihu.com/p/3…...

Selenium使用注意事项:
find_element 和 find_elements 的区别 WebDriver和WebElement的区别 问题: 会遇到报错: selenium.common.exceptions.NoSuchElementException: Message: no such element: Unable to locate element: {"method":"css selector",&…...

《Web前端实战:从零构建“漫步时尚广场”电商后台管理系统》
1. 电商后台管理系统前端架构设计 第一次接触电商后台管理系统开发时,我被各种功能模块搞得晕头转向。直到把整个系统拆解成几个核心部分,才真正理清思路。"漫步时尚广场"这个案例就很典型,我们可以把它看作由三大结构层组成&#…...
——CLI 与 UI 配置详解)
OpenClaw入门教程(1)——CLI 与 UI 配置详解
# OpenClaw 核心概念详解(一):CLI 与 UI 配置 创建日期:2026-04-21 | 作者:AiToMoney团队 🐉 | 版本:v1.0 | 适用版本:OpenClaw 2026.4.14+ 📖 概述 OpenClaw 4.14 版本提供了两种配置方式:CLI(命令行) 和 UI(图形界面),相比 3.13 版本的手动编辑 JSON 文件…...

物理 AI 为什么离不开边缘计算?
过去两年,AI 给人的印象基本是一回事——一个对话框,一个输入框。你打字它打字,你上传它分析,AI 安静地待在屏幕里,处理着一切关于文字、图像、代码的事情。行业的注意力也都跟着堆在那一头。云厂商抢算力,…...

第十四节:Project Glasswing 落地——构建本地 Agent 的双向审查防火墙
引言 承接上一章对大模型 Prompt 注入与越狱攻击的防御,本章将深入探讨 Project Glasswing 的安全治理理念,重点解决本地 Agent 在输入与输出两个环节的安全审查,构建企业级的双向审查防火墙。 核心理论 Project Glasswing 旨在打造一个“看门狗”机制,利用 AI 模型和规…...

AI绘画自动化:从批量生成到Pixiv发布的半自动工具实践
1. 项目概述:从手动到自动,解放AI绘画生产力的全流程工具 如果你是一名深度使用NovelAI或Stable Diffusion这类AI绘画工具的创作者,那么你一定对“批量生成”和“自动发布”这两个词背后的痛楚深有体会。每次生成图片,你都需要在W…...

2025届必备的降AI率助手实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 要降低那 AI 生成文本所呈现出的机械痕迹,就得从事先规划好的词汇、句法以及逻辑…...

AMD Ryzen SMU调试工具:释放你的处理器隐藏性能的终极指南 [特殊字符]
AMD Ryzen SMU调试工具:释放你的处理器隐藏性能的终极指南 🚀 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项…...

2026最权威的六大AI写作平台解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 作为智能写作工具来讲的 DeepSeek,能够高效地促进学术论文撰写效率有所提升。于选…...

汽车外形的演变
汽车外形的演变受三个因素影响,即机械工程学、人机工程学和空气动力学。汽车外形的演变是三者协调发展的结果。机械工程学要求汽车动力性好、操纵稳定性好。人机工程学要求驾乘人员有足够的活动空间,舒适性好。空气动力学则要求汽车行驶时空气阻力小。汽车诞生100多年来,汽车…...

战略洞察:没有退路就是胜利之路
目录 一、《没有退路就是胜利之路》核心知识点总结 1.1 华为文化发展历程的阶段性特征 1.2 华为核心价值观体系解析 1.3 华为文化的洋葱模型与落地机制 1.4 华为文化传承的系统化机制 二、战略思维维度的深度解析与启示 2.1 "没有退路就是胜利之路" 的战略哲学…...