realsense D435l+mid360标定
目录
一、安装realsense环境
二、获取realsense D450L相机内参
三、标定雷达和相机
1.下载livox_camera_calib
2.修改配置参数
3.使用fastlio生成点云
4.标定
一、安装realsense环境
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
//更新依赖库
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
//安装所需的依赖
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
//编译
cd librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
//测试是否安装成功
realsense-viewer安装环境过程中如果出现以下报错,采用以下方法。error: ‘LocalParameterization’ is not a member of ‘ceres-CSDN博客

ceres::LocalParameterization *quatParam = new ceres::EigenQuaternionParameterization();替换为
ceres::Manifold *quatParam = new ceres::EigenQuaternionManifold();
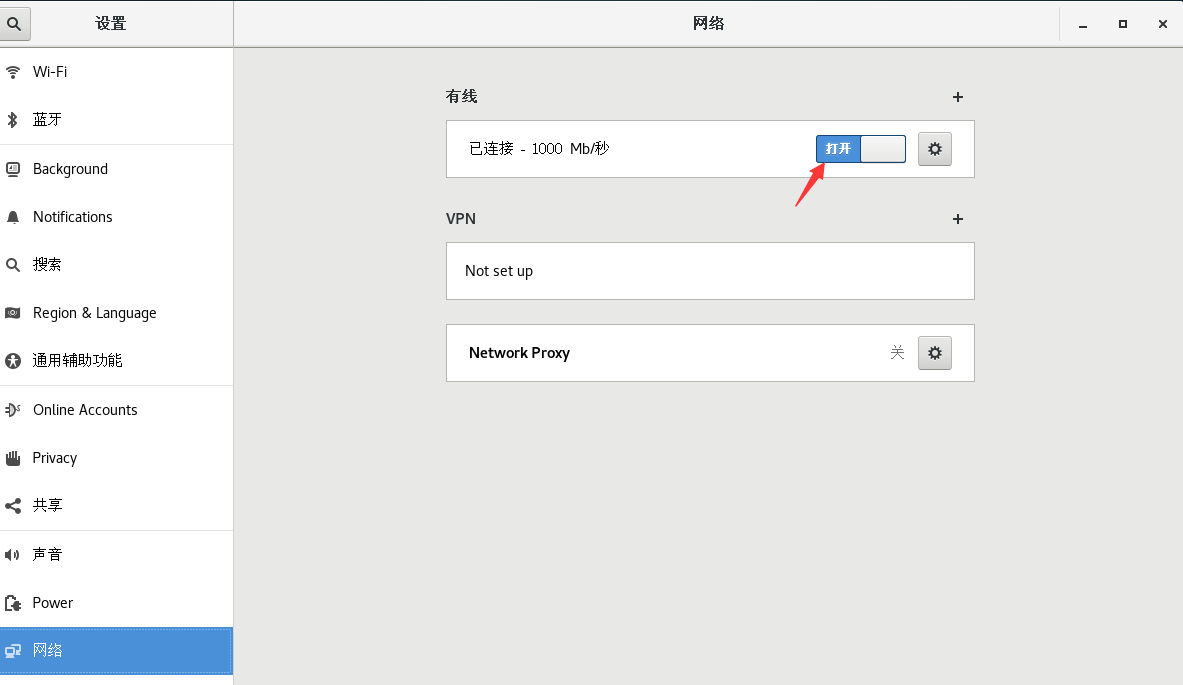
二、获取realsense D450L相机内参
sudo apt install ros-noetic-camera-calibration
roslaunch realsense2_camera rs_camera.launch
内参结果
| distortion_model: "plumb_bob" D: [0.0, 0.0, 0.0, 0.0, 0.0] K: [613.80517578125, 0.0, 321.6905212402344, 0.0, 614.0089111328125, 244.05947875976562, 0.0, 0.0, 1.0] R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0] P: [613.80517578125, 0.0, 321.6905212402344, 0.0, 0.0, 614.0089111328125, 244.05947875976562, 0.0, 0.0, 0.0, 1.0, 0.0] binning_x: 0 binning_y: 0 roi: x_offset: 0 y_offset: 0 height: 0 width: 0 do_rectify: False --- header: seq: 597 stamp: secs: 1720576168 nsecs: 845483780 frame_id: "camera_color_optical_frame" height: 480 width: 640 |
三、标定雷达和相机
1.下载livox_camera_calib
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/livox_camera_calib.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash2.修改配置参数
image_file中存放相机拍摄的图片,pcl_file中存放雷达的点云数据(雷达点云数据采用fastlio算法生成),result_file中存放点云和图片配准的内外参数结果。将上一步生成的相机内参放入camera中。修改calib中的outdoor的yaml文档。

3.使用fastlio生成点云
cd ~/$A_ROS_DIR$/srcgit clone https://github.com/hku-mars/FAST_LIO.gitcd FAST_LIOgit submodule update --initcd ../..catkin_makesource devel/setup.bash
//建图 For Avia mid360需要修改相关节点cd ~/$FAST_LIO_ROS_DIR$source devel/setup.bashroslaunch fast_lio mapping_avia.launchroslaunch livox_ros_driver livox_lidar_msg.launch4.标定
roslaunch livox_camera_calib calib.launch



相关文章:
realsense D435l+mid360标定
目录 一、安装realsense环境 二、获取realsense D450L相机内参 三、标定雷达和相机 1.下载livox_camera_calib 2.修改配置参数 3.使用fastlio生成点云 4.标定 一、安装realsense环境 git clone https://github.com/IntelRealSense/librealsense.git cd librealsense //更…...

深度学习中的正则化技术 - 数据集增强篇
序言 在机器学习与深度学习的广阔领域中,数据集的质量与规模往往是决定模型性能的关键因素之一。然而,现实世界中高质量、标注完善的数据集往往稀缺且获取成本高昂,这成为了制约算法进步的一大瓶颈。为了缓解这一问题,数据集增强…...

【Docker系列】Docker 镜像源:优化你的容器化开发流程
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
【Linux】Windows环境下配置虚拟机静态IP
当前我们虚拟机的Linux操作系统,其IP地址是通过DHCP服务获取的。 DHCP:动态获取IP地址,即每闪重启设备后都会获取一次,可能导致IP地址频繁变更 原因1:办公电脑IP地址变化无所谓,但是我们要远程连接到Linux系统&#x…...

完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效!!!
完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效!!! 亲测有效 完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效࿰…...
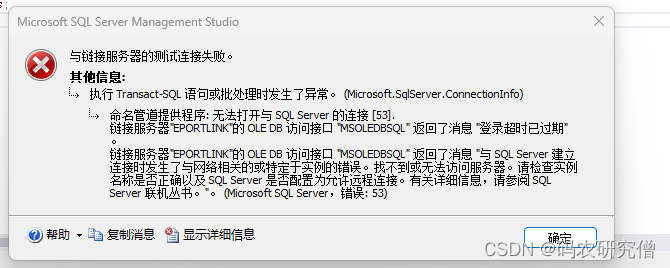
链接服务器“XX”的OLEDB访问接口“MSOLEDBSQL”返回了消息“登录超时已过期” 解决方法
目录 1. 问题所示2. 原理分析3. 解决方法1. 问题所示 出现如下问题: 与链接服务器的测试连接失败。执行Transact-SQL 语句或批处理时发生了异常。命名管道提供程序:无法打开与SQL SERVER的链接[53]链接服务器“XX”的OLEDB访问接口“MSOLEDBSQL”返回了消息“登录超时已过期…...

【AI伦理与社会责任】讨论人工智能在隐私保护、偏见消除、自动化对就业的影响等伦理和社会问题。
人工智能(AI)作为第四次产业革命的核心技术,在推动社会进步和经济发展的同时,也引发了一系列伦理和社会问题。以下从隐私保护、偏见消除以及自动化对就业的影响三个方面进行详细讨论。 一、隐私保护 人工智能技术的广泛应用涉及…...
TCP缓存区数据读取)
Qt编程技巧小知识点(1)TCP缓存区数据读取
文章目录 Qt编程技巧小知识点(1)TCP缓存区数据读取小结 Qt编程技巧小知识点(1)TCP缓存区数据读取 TCP的socket对内存进行读取(使用socket->readall())的时候输出的内容有时会进行局部倒置,其…...

vue 搭建 pinia
文章目录 环境设置存储读取数据【 storeToRefs】借助storeToRefs将store中的数据转为ref对象,方便在模板中使用【getters】当state中的数据,需要经过处理后再使用时,可以使用getters配置【$subscribe】通过 store 的 $subscribe() 方法侦听 s…...

什么是CLR
CLR,全称为Common Language Runtime,即公共语言运行时,是微软为.NET产品构建的运行环境,与Java的JVM(Java虚拟机)类似,可以看作是.NET的虚拟机。CLR的主要作用和特点如下: 主要作用…...

Spring MVC -01
Spring 的 MVC 框架 Spring的MVC框架是Spring框架的一部分,它提供了用于开发Web应用程序的一组组件和设计模式。MVC是Model-View-Controller的缩写,是一种设计模式,用于将应用程序的逻辑与用户界面分离。 在Spring的MVC框架中,Mo…...

山海鲸可视化——天地图画面和热力图
山海鲸引入天地图目前只有 iframe 的方式引入 首先我们创建一个文件夹 ——index.html ——index.js ——data.js 大家都是大佬,我就不详细介绍了,上代码都能看得懂 首先是index.html <!DOCTYPE html> <html lang"zh-CN"> <…...

Python 利用pandas处理CSV文件(DataFrame的基础用法)
前面介绍过通过Python标准库中的CSV模块处理CSV文件: Python 利用CSV模块处理数据 相比CSV模块,pandas的功能更加强大,本文将简单介绍如何通过pandas来处理CSV文件。 文章目录 一、pandas简介二、用法示例2.1 读取CSV文件2.1.1 read_csv参数…...
和*(指针))
c++ 的(引用)和*(指针)
在C中,&(引用)和*(指针)在函数参数中的使用有各自的特点和用途。下面是它们的具体使用方式以及它们之间的一些区别: 引用(&) 使用方式: 引用作为函数参数时,可…...

人工智能算法工程师(中级)课程6-sklearn机器学习之聚类问题与代码详解
大家好,我是微学AI,今天给大家介绍一下人工智能算法工程师(中级)课程6-sklearn机器学习之聚类问题与代码详解。在机器学习领域,聚类是一种无监督学习方法,旨在将相似的数据点划分为同一类别。sklearn是一个广泛应用于机器学习的Py…...

Objective-C 中的 isa 不再是简单的结构体指针
了解 Objective-C 中的 isa 指针内存结构 在 Objective-C 中,isa 指针是对象和类之间的重要桥梁。它不仅帮助运行时系统识别对象的类型,还参与了一些内存和性能优化。本文将深入讲解 isa 指针的内存结构,包括其在早期和现代实现中的演变。 …...

中介子方程五十二
XXFXXaXnXaXXαXLXyXXWXuXeXKXXiXyXΣXXΣXXVXuXhXXWXηXXiXhXXpXiXXpXXbXXpXXiXpXXhXiXXηXWXXhXuXVXXΣXXΣXyXiXXKXeXuXWXXyXLXαXXaXnXaXXFXXaXnXaXXαXLXyXXWXuXeXKXXiXyXΣXXΣXXVXuXhXXWXηXXiXhXXpXiXXpXXbXXpXXiXpXXhXiXXηXWXXhXuXVXXΣXXΣXyXiXXKXeXuXWXXyXLXαXXa…...

LabVIEW在半导体自动化测试中的应用
半导体制造的复杂性和精密度要求极高,每一个生产步骤都需要严格的控制和监测。自动化测试设备在半导体制造中起到了关键作用,通过精密测量和数据分析,确保产品质量和生产效率。本文介绍如何使用LabVIEW结合研华硬件,开发一个用于半…...

政安晨:【Keras机器学习示例演绎】(五十三)—— 使用 TensorFlow 决策森林进行分类
目录 简介 设置 准备数据 定义数据集元数据 配置超参数 实施培训和评估程序 实验 1:使用原始特征的决策森林 检查模型 实验 2:目标编码决策森林 创建模型输入 使用目标编码实现特征编码 使用预处理器创建梯度提升树模型 训练和评估模型 实验…...

51单片机:电脑通过串口控制LED亮灭(附溢出率和波特率详解)
一、功能实现 1.电脑通过串口发送数据:0F 2.点亮4个LED 二、注意事项 1.发送和接受数据的文本模式 2.串口要对应 3.注意串口的波特率要和程序中的波特率保持一致 4.有无校验位和停止位 三、如何使用串口波特率计算器 1.以本程序为例 2.生成代码如下 void Uar…...

抖音批量下载工具架构解析:从技术实现到实战配置指南
抖音批量下载工具架构解析:从技术实现到实战配置指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback suppor…...

鸣潮智能游戏助手:3步搞定自动化战斗,解放双手轻松游戏
鸣潮智能游戏助手:3步搞定自动化战斗,解放双手轻松游戏 【免费下载链接】ok-wuthering-waves 鸣潮 后台自动战斗 自动刷声骸 一键日常 Automation for Wuthering Waves 项目地址: https://gitcode.com/GitHub_Trending/ok/ok-wuthering-waves 你是…...

Docketeer:开源Docker管理平台,替代Docker Desktop的轻量级方案
1. 项目概述:从Docker桌面到开源替代的探索如果你是一名开发者、运维工程师,或者任何需要与容器打交道的技术从业者,大概率对Docker Desktop又爱又恨。爱的是它提供了一个图形化的界面,让容器的管理、镜像的构建变得直观ÿ…...
实战解析)
R语言数据重塑:从宽表到长表的melt()实战解析
1. 为什么需要从宽表转长表? 做数据分析的朋友们应该都遇到过这样的场景:拿到一份Excel表格,每一列代表不同的测量指标(比如血压、血糖、胆固醇),每一行是一个患者记录。这种"横着铺开"的数据结构…...

观察taotoken平台在多模型聚合调用下的路由稳定性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察 Taotoken 平台在多模型聚合调用下的路由稳定性 在构建依赖大模型能力的生产应用时,服务的持续可用性是核心诉求之…...

视频硬字幕提取终极实战:如何用深度学习实现本地化高效提取?
视频硬字幕提取终极实战:如何用深度学习实现本地化高效提取? 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕…...

esptool芯片擦除功能全解析:全擦除与区域擦除的智能选择
esptool芯片擦除功能全解析:全擦除与区域擦除的智能选择 【免费下载链接】esptool Serial utility for flashing, provisioning, and interacting with Espressif SoCs 项目地址: https://gitcode.com/gh_mirrors/es/esptool esptool芯片擦除是ESP系列芯片开…...

RPFM:全面战争MOD开发的终极效率提升指南
RPFM:全面战争MOD开发的终极效率提升指南 【免费下载链接】rpfm Rusted PackFile Manager (RPFM) is a... reimplementation in Rust and Qt6 of PackFile Manager (PFM), one of the best modding tools for Total War Games. 项目地址: https://gitcode.com/gh_…...

彻底告别Windows激活烦恼:KMS智能激活工具完整使用指南
彻底告别Windows激活烦恼:KMS智能激活工具完整使用指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统频繁弹出的激活提醒而烦恼吗?是否因为Office突然…...

告别论文终稿噩梦:百考通AI如何让本科毕业设计成为“一次过”的顺畅体验
深夜的电脑蓝光映着布满血丝的眼睛,文档里满是批注与飘红——这是许多本科生在论文终稿前的常态。而一个智能工具正在悄然改变这场折磨。 凌晨三点的大学宿舍,键盘敲击声逐渐稀疏,取而代之的是此起彼伏的叹息。电脑屏幕上,Word文档…...