【高中数学/幂函数】比较a=2^0.3,b=3^0.2,c=7^0.1的大小
【问题】
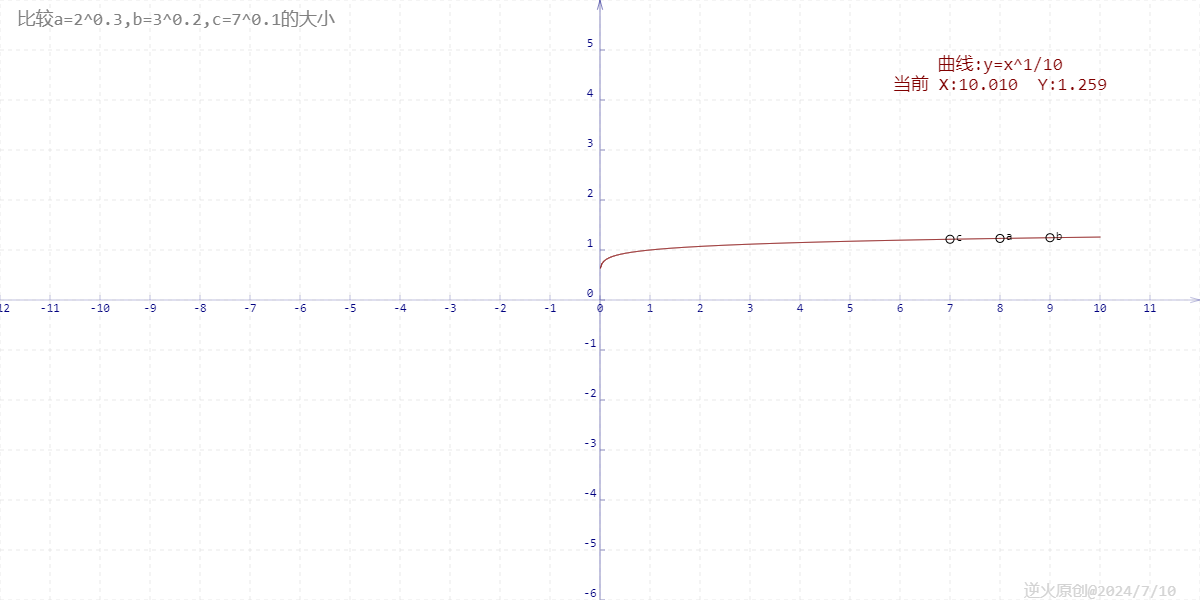
比较a=2^0.3,b=3^0.2,c=7^0.1的大小
【解答】
a=2^0.3=2^3/10=(2^3)^1/10=8^1/10
b=3^0.2=3^2/10=(3^2)^1/10=9^1/10
c=7^0.1=7^1/10
由于y=x^1/10在x正半轴是增函数,底数大的得数就大。
因为9>8>7,所以b>a>c
【图像】
在图像上绘出曲线y=x^1/10,再绘出a=8^1/10,b=9^1/10,c=7^1/10,便可一目了然。
【代码】
<!DOCTYPE html>
<html lang="utf-8">
<meta http-equiv="Content-Type" content="text/html; charset=utf-8"/>
<head><title>UNASSIGNED</title><style type="text/css">.centerlize{margin:0 auto;border:0px solid red;width:1200px;height:600px;}</style></head><body οnlοad="draw();"><div class="centerlize"><canvas id="myCanvas" width="10px" height="10px" style="border:1px dashed black;">如果看到这段文字说您的浏览器尚不支持HTML5 Canvas,请更换浏览器再试.</canvas></div></body>
</html>
<script type="text/javascript">
<!--
/*****************************************************************
* 将全体代码拷贝下来,粘贴到文本编辑器中,另存为.html文件,
* 再用chrome浏览器打开,就能看到动画效果。
******************************************************************/// 系统常量定义处
const TITLE="比较a=2^0.3,b=3^0.2,c=7^0.1的大小"; // 图像标题
const WIDTH=1200; // 画布宽度
const HEIGHT=600; // 画布高度
const ScaleUnit=50; // 缩放比例// 系统变量定义处
var context=0; // 画布环境
var stage; // 舞台对象
var timeElapsed=0; // 动画运作的的时间
const TIME_END=100000; // 动画运作的期限//-------------------------------
// Canvas开始运作,由body_onload调用
//-------------------------------
function draw(){document.title=TITLE;// 画图前初始化var canvas=document.getElementById('myCanvas'); canvas.width=WIDTH;canvas.height=HEIGHT; context=canvas.getContext('2d'); // 进行屏幕坐标系到笛卡尔坐标系的变换// 处置完成前,原点在左上角,向右为X正向,向下为Y的正向// 处置完毕后,原点移动到画布中央,向右为X正向,向上为Y的正向context.translate(WIDTH/2,HEIGHT/2);context.rotate(Math.PI);context.scale(-1,1);// 初始化舞台stage=new Stage();// 开始动画animate();
};//-------------------------------
// 画图
//-------------------------------
function animate(){ timeElapsed+=1;// 时间每轮增加1stage.update(timeElapsed);stage.paintBg(context);stage.paint(context);if(timeElapsed<TIME_END){ window.requestAnimationFrame(animate);}
}//-------------------------------
// 舞台对象定义处
//-------------------------------
function Stage(){var obj=new Object;obj.curve1={name:"曲线:y=x^1/10",xEnd:10,x:0,y:0,color:"maroon",setY:function(x){this.y=Math.pow(x,1/10);// 解析式// 制成坐标let coord={"x":x,"y":this.y};this.pts0.push(coord);},"pts0":[],};// 随时间更新位置obj.update=function(t){// 记录曲线1的xy值if(obj.curve1.x<obj.curve1.xEnd){obj.curve1.x+=0.01;obj.curve1.setY(obj.curve1.x);}};// 画前景obj.paint=function(ctx){ // 曲线一名称drawText(ctx,this.curve1.name,400,225,this.curve1.color,18);// 曲线一当前点坐标drawText(ctx,"当前 X:"+this.curve1.x.toFixed(3)+" Y:"+this.curve1.y.toFixed(3),400,205,this.curve1.color,18);// 绘制曲线一paintCurve(ctx,this.curve1.color,this.curve1.pts0);//var mm=findMaxMin(this.curve2.pts0);//markMaxMin(ctx,mm,this.curve2.color);// a,b比较paintPoint(ctx,8,Math.pow(8,1/10),"a","black");paintPoint(ctx,9,Math.pow(9,1/10),"b","black"); paintPoint(ctx,7,Math.pow(7,1/10),"c","black");};// 画背景obj.paintBg=function(ctx){// 清屏ctx.clearRect(-600,-300,1200,600);ctx.fillStyle="white";ctx.fillRect(-600,-300,1200,600);// 画X轴drawAxisX(ctx,-600,600,50);// 画Y轴drawAxisY(ctx,-300,300,50);// 画网格线drawGrid(ctx,-600,-300,50,1200,600,50,"lightGrey");// 左上角标题var metrics = ctx.measureText(TITLE);var textWidth = metrics.width;drawText(ctx,TITLE,-WIDTH/2+textWidth,HEIGHT/2-30,"grey",18);// 右下角作者,日期const waterMarkTxt="逆火原创@"+(new Date()).toLocaleDateString();metrics = ctx.measureText(waterMarkTxt);textWidth = metrics.width;drawText(ctx,waterMarkTxt,WIDTH/2-textWidth,-HEIGHT/2,"lightGrey",16);};return obj;
}// 描绘并标识一个点
function paintPoint(ctx,x,y,text,color){ctx.beginPath();ctx.arc(x*ScaleUnit,y*ScaleUnit,4,0,Math.PI*2,false);ctx.closePath();ctx.strokeStyle=color;ctx.stroke();drawText(ctx,text,x*ScaleUnit+9,y*ScaleUnit-5,color,12);
}// 连点成线画曲线
function paintCurve(ctx,color,cds){ctx.strokeStyle = color;ctx.beginPath(); for(var i=0; i<cds.length; i++){let y=cds[i].y;if(Math.abs(cds[i].y*ScaleUnit)<300){ctx.lineTo(cds[i].x*ScaleUnit,cds[i].y*ScaleUnit);}} ctx.stroke();
}// 找到坐标数组的最大最小值
function findMaxMin(cds){if(cds.length<1){return null;}var retval={max:-10000,max_x:0,min:10000,min_x:0};for(var i=0;i<cds.length;i++){var y=cds[i].y;if(y>retval.max){retval.max=y;retval.max_x=cds[i].x;}if(y<retval.min){retval.min=y;retval.min_x=cds[i].x;}} return retval;
}// 绘出最大最小值
function markMaxMin(ctx,mm,color){if(mm==null){return;}// 最大值var x=mm.max_x;var y=mm.max;ctx.strokeStyle=color;ctx.beginPath();ctx.arc(x*ScaleUnit,y*ScaleUnit,5,0,Math.PI*2,false);ctx.closePath();ctx.stroke();var text="max@x="+x.toFixed(3)+" y="+y.toFixed(3);drawText(ctx,text,x*ScaleUnit,y*ScaleUnit,color,12);// 最小值var x=mm.min_x;var y=mm.min;ctx.strokeStyle=color;ctx.beginPath();ctx.arc(x*ScaleUnit,y*ScaleUnit,5,0,Math.PI*2,false);ctx.closePath();ctx.stroke();var text="min@x="+x.toFixed(3)+" y="+y.toFixed(3);drawText(ctx,text,x*ScaleUnit,y*ScaleUnit,color,12);
}// 定点画实心圆
function drawSolidCircle(ctx,x,y,r,color){ctx.save();ctx.beginPath();ctx.arc(x,y,r,0,2*Math.PI);ctx.fillStyle=color;ctx.fill();ctx.stroke();ctx.restore();
}// 两点之间画线段
function drawLine(ctx,x1,y1,x2,y2,color){ctx.save();ctx.lineWidth=0.25;ctx.strokeStyle=color;ctx.fillStyle=color;ctx.beginPath();ctx.moveTo(x1,y1);ctx.lineTo(x2,y2);ctx.stroke();ctx.closePath();ctx.restore();
}// 画横轴
function drawAxisX(ctx,start,end,step){ctx.save();ctx.lineWidth=0.25;ctx.strokeStyle='navy';ctx.fillStyle='navy';// 画轴ctx.beginPath();ctx.moveTo(start, 0);ctx.lineTo(end, 0);ctx.stroke();ctx.closePath();// 画箭头ctx.beginPath();ctx.moveTo(end-Math.cos(getRad(15))*10, Math.sin(getRad(15))*10);ctx.lineTo(end, 0);ctx.lineTo(end-Math.cos(getRad(15))*10, -Math.sin(getRad(15))*10);ctx.stroke();ctx.closePath();// 画刻度var x,y;y=5;for(x=start;x<end;x+=step){ctx.beginPath();ctx.moveTo(x, 0);ctx.lineTo(x, y);ctx.stroke();ctx.closePath();drawText(ctx,x/ScaleUnit+"",x,y-20,"navy",12);}ctx.restore();
}// 画纵轴
function drawAxisY(ctx,start,end,step){ctx.save();ctx.lineWidth=0.5;ctx.strokeStyle='navy';ctx.fillStyle='navy';// 画轴ctx.beginPath();ctx.moveTo(0, start);ctx.lineTo(0, end);ctx.stroke();ctx.closePath();// 画箭头ctx.beginPath();ctx.moveTo(Math.sin(getRad(15))*10, end-Math.cos(getRad(15))*10);ctx.lineTo(0, end);ctx.lineTo(-Math.sin(getRad(15))*10, end-Math.cos(getRad(15))*10);ctx.stroke();ctx.closePath();// 画刻度var x,y;x=5;for(y=start;y<end;y+=step){ctx.beginPath();ctx.moveTo(x, y);ctx.lineTo(0, y);drawText(ctx,y/ScaleUnit+"",x-15,y,"navy",12);ctx.stroke();ctx.closePath();}ctx.restore();
}// 画网格线
function drawGrid(ctx,x1,y1,step1,x2,y2,step2,color){ctx.save();ctx.lineWidth=0.5;ctx.strokeStyle=color;ctx.fillStyle=color;ctx.setLineDash([4,4]);// 设置虚线var x,y;for(x=x1;x<x2;x+=step1){ctx.beginPath();ctx.moveTo(x, y1);ctx.lineTo(x, y2);ctx.stroke();ctx.closePath();}for(y=y1;y<y2;y+=step2){ctx.beginPath();ctx.moveTo(x1, y);ctx.lineTo(x2, y);ctx.stroke();ctx.closePath();}ctx.restore();
}//-------------------------------
// 角度得到弧度
//-------------------------------
function getRad(degree){return degree/180*Math.PI;
}//-------------------------------
// 得到颜色
//-------------------------------
function getColor(index){var arr=["aqua"/* aqua湖绿色*/,"black"/* black黑色*/,"blue"/* blue蓝色*/,"fuchsia"/* fuchsia 紫红*/,"green"/* green 绿色*/,"grey"/* grey 草木灰*/,"lime"/* lime 亮绿色*/,"maroon"/* maroon 棕色*/,"navy"/* navy 海军蓝*/,"orange"/* orange 橙色*/,"purple"/* purple 紫色*/,"red"/* red 大红*/, "skyblue"/* skyblue 天蓝*/,"teal"/* teal 蓝绿色*/,"yellow"/* yellow 亮黄*/,"#aa0000"/* #aa0000 铁锈红*/, ];if(index>arr.length){index=index % arr.length;}return arr[index];
}//-------------------------------------
// 绘制文字,指定颜色
// ctx:绘图环境
// text:文字
// x,y:坐标
// color:颜色
// size:字体大小
//-------------------------------------
function drawText(ctx,text,x,y,color,size){ctx.save();ctx.translate(x,y)ctx.rotate(getRad(180))ctx.scale(-1,1)ctx.textBaseline="bottom";ctx.textAlign="center";ctx.fillStyle=color;ctx.font = size+"px consolas";ctx.fillText(text,0,0);ctx.restore();
}// JS开立方
function kaiLiFang(x){if(x>0){return Math.pow(x,1/3);}else{return -Math.pow(-x,1/3);}
}
//-->
/**************************************
《赠友》
--杜运夑我有眼泪给别人,但不愿为自己痛哭;我没有使自己适合于这世界,也没有美丽的自辟的国土,就只好永远渴望:为希望而生;在希望里死去,终于承认了不知道生命;接受了它又挥霍掉,只是历史的工具,长路上的一粒沙,所以拼命摆脱那黑影,而他们因此讥笑我;这就选择了寂寞,热闹的寂寞,用笑声骗自己,飘浮在庸俗生活的涡流里,而渐渐,我就说,我是个庸俗主义者,无心痛哭。
**************************************/
</script>
END
相关文章:
【高中数学/幂函数】比较a=2^0.3,b=3^0.2,c=7^0.1的大小
【问题】 比较a2^0.3,b3^0.2,c7^0.1的大小 【解答】 a2^0.32^3/10(2^3)^1/108^1/10 b3^0.23^2/10(3^2)^1/109^1/10 c7^0.17^1/10 由于yx^1/10在x正半轴是增函数,底数大的得数就大。 因为9>8>7,所以b>a>c 【图像】 在图像上绘出曲线yx^1/10&…...

双向带头循环链表
一、概念 何为双向:此链表每一个节点的指针域由两部分组成,一个指针指向下一个节点,另一个指针指向上一个节点,并且两头的节点也是如此,头节点的下一个节点是尾节点,尾节点的上一个节点是头节点;…...

探索TASKCTL和 DataStage 的ETL任务调度协同
在复杂多变的企业环境中,高效、准确的数据处理是支撑业务决策与运营的核心。本文将深入探讨任务调度平台TASKCTL与ETL工具DataStage的深度融合,通过详尽的代码示例、结合细节以及实际案例的具体描述,展示这两个工具如何携手打造企业数据处理生…...

Facebook软体机器人与机器人框架:创新社交互动的未来
随着人工智能技术的不断进步,Facebook正通过软体机器人和先进的机器人框架,重新定义社交互动的未来。这些创新不仅提升了用户体验,也为开发者提供了强大的工具来构建下一代社交应用。 一、Facebook软体机器人:智能化的社交伙伴 …...

掌握音视频转换的艺术:用FFmpeg解锁多媒体的无限可能
在数字时代,音视频内容无处不在,从在线课程、娱乐视频到专业会议,它们都是信息传播的关键载体。然而,随着多媒体格式的不断演进,我们常常会遇到格式不兼容的问题,这成为了享受或处理这些内容的一大障碍。幸…...

C基础day9
一、思维导图 二、课后练习 1> 使用递归实现 求 n 的 k 次方 #include<myhead.h>int Pow(int n,int k) {if(k 0 ) //递归出口{return 1;}else{return n*Pow(n,k-1); //递归主体} }int main(int argc, const char *argv[]) {int n0,k0;printf("请输入n和k:&…...
)
32. 小批量梯度下降法(Mini-batch Gradient Descent)
在深度学习模型的训练过程中,梯度下降法是最常用的优化算法之一。我们前面介绍了批量梯度下降法(Batch Gradient Descent)和随机梯度下降法(Stochastic Gradient Descent),两者各有优缺点。为了在计算速度和…...

MySQL第八次作业
一、备份与恢复作业: 创库,建表: CREATE DATABASE booksDB; use booksDB; CREATE TABLE books ( bk_id INT NOT NULL PRIMARY KEY, bk_title VARCHAR(50) NOT NULL, copyright YEAR NOT NULL ); CREATE TABLE authors …...

【合集】临时邮箱网站 临时邮箱API(持续更新)
众所周知,在注册一些账户时,比较常见的验证方式就是邮箱,但是在进行一些小众和不知名网站注册时,邮箱的泄露可能预示着不休止的邮件推送。尤其是当我们只是想临时使用邮箱这种情况,第二种,批量注册账号的情…...

职场新人感受
互联网职场感受 阶段介绍 24届6月底毕业生,之前从未实习过。 岗位是后端开发(JAVA),目前已经上班三周(前两周看文档和做了半个简单需求,第三周脱产新人培训)。 职场体验 职场和想象中的工作…...
)
Window 下Mamba 环境安装踩坑问题汇总及解决方法 (无需绕过selective_scan_cuda)
导航 Mamba 及 Vim 安装问题参看本人之前博客:Mamba 环境安装踩坑问题汇总及解决方法Linux 下Vmamba 安装教程参看本人之前博客:Vmamba 安装教程(无需更改base环境中的cuda版本)Windows 下 VMamba的安装参看本人之前博客…...

前端项目本地的node_modules直接上传到服务器上无法直接使用(node-sasa模块报错)
跑 jekins任务的服务器不能连接外网下载依赖包,就将本地下载的 node_modules直接上传到服务器上,但是运行时node-sass模块报错了ERROR in Missing binding /root/component/node_modules/node-sass/vendor/linux-x64-48/binding.node >> 报错信息类…...

Hadoop3:动态扩容之新增一台机器的初始化工作
一、需求描述 给Hadoop集群动态扩容一个节点 那么,这个节点是全新的,我们需要做哪些准备工作,才能将它融入集群了? 二、初始化配置 1、修改IP和hostname vim /etc/sysconfig/network-scripts/ifcfg-ens33 vim /etc/hostname2、…...

【正点原子i.MX93开发板试用连载体验】录音小程序采集语料
本文最早发表于电子发烧友论坛:【新提醒】【正点原子i.MX93开发板试用连载体验】基于深度学习的语音本地控制 - 正点原子学习小组 - 电子技术论坛 - 广受欢迎的专业电子论坛! (elecfans.com) 接下来就是要尝试训练中文提示词。首先要进行语料采集,这是一…...

【EasyExcel】动态替换表头内容并应用样式
1.定义实体类 import com.alibaba.excel.annotation.ExcelProperty; import com.alibaba.excel.annotation.ContentStyle; import com.alibaba.excel.metadata.BorderStyleEnum; import com.alibaba.excel.metadata.VerticalAlignmentEnum; import com.alibaba.excel.metadata.…...

RocketMQ实现分布式事务
RocketMQ的分布式事务消息功能,在普通消息基础上,支持二阶段的提交。将二阶段提交和本地事务绑定,实现全局提交结果的一致性。 1、生产者将消息发送至RocketMQ服务端。 2、RocketMQ服务端将消息持久化成功之后,向生产者返回Ack确…...

【Rust练习】2.数值类型
练习题来自https://practice-zh.course.rs/basic-types/numbers.html 1 // 移除某个部分让代码工作 fn main() {let x: i32 5;let mut y: u32 5;y x;let z 10; // 这里 z 的类型是? }y的类型不对,另外,数字的默认类型是i32 fn main() {let x: i…...

通过 PPPOE 将 linux 服务器作为本地局域网 IPv4 外网网关
将 linux 服务器作为本地外网网关,方便利用 Linux 生态中的各种网络工具,对流量进行自定义、精细化管理… 环境说明 拨号主机:CentOS 7.9, Linux Kernel 5.4.257 拨号软件: rp-pppoe-3.11-7.el7.x86_64初始化 1、升级系统到新的稳定内核&a…...
gin源码分析
一、高性能 使用sync.pool解决频繁创建的context对象,在百万并发的场景下能大大提供访问性能和减少GC // ServeHTTP conforms to the http.Handler interface. // 每次的http请求都会从sync.pool中获取context,用完之后归还到pool中 func (engine *Engin…...

数学建模入门
目录 文章目录 前言 一、数学建模是什么? 1、官方概念: 2、具体过程 3、适合哪一类人参加? 4、需要有哪些学科基础呢? 二、怎样准备数学建模(必备‘硬件’) 1.组队 2.资料搜索 3.常用算法总结 4.论文撰写的…...

STM32F4电池电量监测实战:用HAL库和ADC DMA,从硬件分压到软件滤波全流程解析
STM32F4电池电量监测实战:从硬件设计到软件滤波的工程化实现 在物联网设备和便携式电子产品的开发中,精确监测电池电量是一个看似简单却暗藏玄机的关键技术点。许多开发者都曾遇到过这样的困境:实验室测试时电量显示精准稳定,一旦…...

05-系统技术架构师必备——软件工程方法与UML建模体系
关键词:UML建模、Scrum、敏捷开发、软件测试、白盒测试、McCabe复杂度、瀑布模型、RUPUML 软件工程 敏捷开发 软件测试 Scrum RUP 系统架构 建模系统技术架构师必备——软件工程方法与UML建模体系 摘要 UML建模和软件工程方法是系统技术架构师与开发团队沟通的"…...

保姆级教程:用STM32F103ZET6+超声波+红外模块,从零搭建一个能报警的智能循迹小车
从零构建STM32智能循迹避障小车的全流程实战指南 在创客教育和嵌入式开发领域,智能小车一直是入门学习的经典项目。它不仅融合了传感器技术、电机控制和嵌入式编程等核心知识点,更能让学习者在完成一个完整产品的过程中获得成就感。本文将手把手带你使用…...
)
AI Agent重构餐饮服务链:从排队超15分钟到响应<1.2秒的9大技术跃迁(行业首份效能白皮书)
更多请点击: https://kaifayun.com 第一章:AI Agent重构餐饮服务链:从排队超15分钟到响应<1.2秒的9大技术跃迁(行业首份效能白皮书) 传统餐饮服务链中,用户进店、点餐、支付、出餐、反馈等环节高度依赖…...

AI Agent不是工具课,而是组织进化课:全球TOP5咨询公司正在用的7维培训成熟度评估框架
更多请点击: https://intelliparadigm.com 第一章:AI Agent不是工具课,而是组织进化课:全球TOP5咨询公司正在用的7维培训成熟度评估框架 当麦肯锡、BCG、贝恩、罗兰贝格与奥纬在2024年Q2同步升级其内部AI能力发展路线图时&#x…...

5分钟终极指南:用obs-multi-rtmp插件实现OBS多平台同步直播
5分钟终极指南:用obs-multi-rtmp插件实现OBS多平台同步直播 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 还在为每个直播平台单独配置OBS而烦恼吗?obs-multi-r…...

揭秘FPGA内部世界:PrjXRay开源工具完整指南
揭秘FPGA内部世界:PrjXRay开源工具完整指南 【免费下载链接】prjxray Documenting the Xilinx 7-series bit-stream format. 项目地址: https://gitcode.com/gh_mirrors/pr/prjxray 你是否曾好奇FPGA芯片内部的神秘世界?那些二进制位流背后究竟隐…...

别再瞎写抽奖了!从原神保底到洗牌算法,5种实战模型帮你搞定游戏概率设计
游戏抽奖系统设计实战:从概率模型到商业落地的5种解决方案 当玩家在《原神》中第89次抽卡仍未获得五星角色时,心跳加速的瞬间背后是精密的数学计算与商业逻辑的完美结合。抽奖系统作为现代游戏的核心付费点,其设计质量直接影响玩家留存、付费…...

用户测试完整流程:如何在测试阶段验证产品假设
用户测试完整流程:如何在测试阶段验证产品假设 【免费下载链接】design-sprint Product Design Sprint Material 项目地址: https://gitcode.com/gh_mirrors/de/design-sprint 在产品开发过程中,用户测试是验证产品假设、确保产品满足用户需求的关…...

Hotkey Detective:3分钟找出Windows热键冲突的终极指南
Hotkey Detective:3分钟找出Windows热键冲突的终极指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否遇…...