【嵌入式Linux学习笔记】Linux驱动开发
Linux系统构建完成后,就可以基于该环境方便地进行开发了,相关的开发流程与MCU类似,但是引入了设备树的概念,编写应用代码要相对复杂一点。但是省去了很多配置工作。
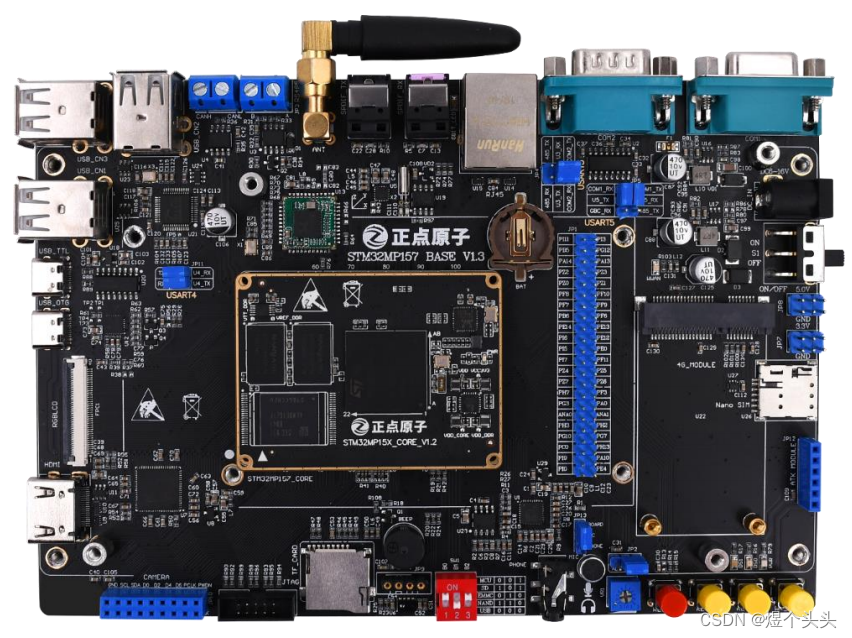
学习视频地址:【正点原子】STM32MP157开发板
字符设备驱动开发
驱动流程

在 Linux 中一切皆为文件,驱动加载成功以后会在“/dev”目录下生成一个相应的文件,应用程序通过对这个名为“/dev/xxx”(xxx 是具体的驱动文件名字)的文件进行相应的操作即可实现对硬件的操作。
比如现在有个叫做/dev/led 的驱动文件,此文件是 led 灯的驱动文件。
- open 函数来打开文件/dev/led,使用完成以后使用 close 函数关闭/dev/led 这个文件。 open和 close 就是打开和关闭 led 驱动的函数
- 点亮或关闭 led,那么就使用 write 函数来操作,也就是向此驱动写入数据,这个数据就是要关闭还是要打开 led 的控制参数
- 如果要获取led 灯的状态,就用 read 函数从驱动中读取相应的状态。
内核驱动函数及变量
owner:拥有该结构体的模块的指针变量, 一般设置为 THIS_MODULE
llseek:修改文件当前的读写位置
read:读取设备文件
write:向设备文件写入数据
poll:轮询函数,用于查询设备是否可以进行非阻塞的读写。
unlocked_ioctl:提供对于设备的控制功能,与应用程序中的 ioctl 函数对应
compat_ioctl:函数与 unlocked_ioctl 函数功能一样,区别在于在 64 位系统上,
32 位的应用程序调用将会使用此函数。在 32 位的系统上运行 32 位的应用程序调用的是unlocked_ioctl。
mmap:用于将将设备的内存映射到进程空间中(也就是用户空间),一般帧
缓冲设备会使用此函数,比如 LCD 驱动的显存,将帧缓冲(LCD 显存)映射到用户空间中以后应用程序就可以直接操作显存了,这样就不用在用户空间和内核空间之间来回复制。
open:打开设备文件
release:用于释放(关闭)设备文件,与应用程序中的 close 函数对应
fasync:用于刷新待处理的数据,用于将缓冲区中的数据刷新到磁盘中
驱动开发步骤
1. 驱动模块的加载和卸载
- 将驱动编译进Linux内核中,内核启动时就会自动运行驱动程序
- 将驱动编译为模块(Linux 下模块扩展名为.ko),Linux内核启动后采用modprobe指令加载模块。
module_init(xxx_init); //注册模块加载函数
module_exit(xxx_exit); //注册模块卸载函数
2. 字符设备的注册与注销
字符设备的注册与注销放在模块的加载和卸载函数中。
// 只指定主设备号,会造成资源浪费
static inline int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)
static inline void unregister_chrdev(unsigned int major,const char *name)// 用多少申请多少,比较合理
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
int register_chrdev_region(dev_t from, unsigned count, const char *name)
void unregister_chrdev_region(dev_t from, unsigned count)
3. 类和设备的创建
这部分是为了设备可以自动创建和删除文件节点
// 类的创建和删除
struct class *class_create (struct module *owner, const char *name)
void class_destroy(struct class *cls)// 设备的创建和删除
struct device *device_create(struct class *cls,struct device *parent, dev_t devt, void *drvdata, const char *fmt, ...)
void device_destroy(struct class *cls, dev_t devt)
4. 实例代码
字符设备驱动
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>#define CHRDEVBASE_MAJOR 100 /* 主设备号 */
#define CHRDEVBASE_NAME "devbase" /* 设备名 */static char readbuf[100]; /* 读缓冲区 */
static char writebuf[100]; /* 写缓冲区 */
static char kerneldata[] = {"kernel data!"};/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int chrdevbase_open(struct inode *inode, struct file *filp)
{printk("devbase open! \r\n");return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 向用户空间发送数据 */memcpy(readbuf, kerneldata, sizeof(kerneldata));retvalue = copy_to_user(buf, readbuf, cnt);if(retvalue == 0){printk("kernel senddata ok!\r\n");}else{printk("kernel senddata failed!\r\n");}return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue = 0;/* 接收用户空间传递给内核的数据并且打印出来 */retvalue = copy_from_user(writebuf, buf, cnt);if(retvalue == 0){printk("kernel recevdata:%s\r\n", writebuf);}else{printk("kernel recevdata failed!\r\n");}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int chrdevbase_release(struct inode *inode, struct file *filp)
{printk("devbase release! \r\n");return 0;
}/** 设备操作函数结构体*/
static struct file_operations devbase_fops = {.owner = THIS_MODULE, .open = chrdevbase_open,.read = chrdevbase_read,.write = chrdevbase_write,.release = chrdevbase_release,
};/** @description : 驱动入口函数 * @param : 无* @return : 0 成功;其他 失败*/
static int __init chrdevbase_init(void)
{int retvalue = 0;/* 注册字符设备驱动 */retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &devbase_fops);if(retvalue < 0){printk("chrdevbase driver register failed\r\n");}printk("chrdevbase init!\r\n");return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit chrdevbase_exit(void)
{/* 注销字符设备驱动 */unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME);printk("chrdevbase exit!\r\n");
}/* * 将上面两个函数指定为驱动的入口和出口函数 */
module_init(chrdevbase_init);
module_exit(chrdevbase_exit);/* * LICENSE和作者信息*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("JozenLee");
新字符驱动代码(以LED为例)
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define NEWCHRLED_CNT 1 /* 设备号个数 */
#define NEWCHRLED_NAME "newchrled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* 寄存器物理地址 */
#define PERIPH_BASE (0x40000000)
#define MPU_AHB4_PERIPH_BASE (PERIPH_BASE + 0x10000000)
#define RCC_BASE (MPU_AHB4_PERIPH_BASE + 0x0000)
#define RCC_MP_AHB4ENSETR (RCC_BASE + 0XA28)
#define GPIOI_BASE (MPU_AHB4_PERIPH_BASE + 0xA000)
#define GPIOI_MODER (GPIOI_BASE + 0x0000)
#define GPIOI_OTYPER (GPIOI_BASE + 0x0004)
#define GPIOI_OSPEEDR (GPIOI_BASE + 0x0008)
#define GPIOI_PUPDR (GPIOI_BASE + 0x000C)
#define GPIOI_BSRR (GPIOI_BASE + 0x0018)/* 映射后的寄存器虚拟地址指针 */
static void __iomem *MPU_AHB4_PERIPH_RCC_PI;
static void __iomem *GPIOI_MODER_PI;
static void __iomem *GPIOI_OTYPER_PI;
static void __iomem *GPIOI_OSPEEDR_PI;
static void __iomem *GPIOI_PUPDR_PI;
static void __iomem *GPIOI_BSRR_PI;/* newchrled设备结构体 */
struct newchrled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */
};struct newchrled_dev newchrled; /* led设备 *//** @description : LED打开/关闭* @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED* @return : 无*/
void led_switch(u8 sta)
{u32 val = 0;if(sta == LEDON) {val = readl(GPIOI_BSRR_PI);val |= (1 << 16); writel(val, GPIOI_BSRR_PI);}else if(sta == LEDOFF) {val = readl(GPIOI_BSRR_PI);val|= (1 << 0); writel(val, GPIOI_BSRR_PI);}
}/** @description : 取消映射* @return : 无*/
void led_unmap(void)
{/* 取消映射 */iounmap(MPU_AHB4_PERIPH_RCC_PI);iounmap(GPIOI_MODER_PI);iounmap(GPIOI_OTYPER_PI);iounmap(GPIOI_OSPEEDR_PI);iounmap(GPIOI_PUPDR_PI);iounmap(GPIOI_BSRR_PI);
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &newchrled; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { led_switch(LEDON); /* 打开LED灯 */} else if(ledstat == LEDOFF) {led_switch(LEDOFF); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{return 0;
}/* 设备操作函数 */
static struct file_operations newchrled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{u32 val = 0;int ret;/* 初始化LED *//* 1、寄存器地址映射 */MPU_AHB4_PERIPH_RCC_PI = ioremap(RCC_MP_AHB4ENSETR, 4);GPIOI_MODER_PI = ioremap(GPIOI_MODER, 4);GPIOI_OTYPER_PI = ioremap(GPIOI_OTYPER, 4);GPIOI_OSPEEDR_PI = ioremap(GPIOI_OSPEEDR, 4);GPIOI_PUPDR_PI = ioremap(GPIOI_PUPDR, 4);GPIOI_BSRR_PI = ioremap(GPIOI_BSRR, 4);/* 2、使能PI时钟 */val = readl(MPU_AHB4_PERIPH_RCC_PI);val &= ~(0X1 << 8); /* 清除以前的设置 */val |= (0X1 << 8); /* 设置新值 */writel(val, MPU_AHB4_PERIPH_RCC_PI);/* 3、设置PI0通用的输出模式。*/val = readl(GPIOI_MODER_PI);val &= ~(0X3 << 0); /* bit0:1清零 */val |= (0X1 << 0); /* bit0:1设置01 */writel(val, GPIOI_MODER_PI);/* 3、设置PI0为推挽模式。*/val = readl(GPIOI_OTYPER_PI);val &= ~(0X1 << 0); /* bit0清零,设置为上拉*/writel(val, GPIOI_OTYPER_PI);/* 4、设置PI0为高速。*/val = readl(GPIOI_OSPEEDR_PI);val &= ~(0X3 << 0); /* bit0:1 清零 */val |= (0x2 << 0); /* bit0:1 设置为10*/writel(val, GPIOI_OSPEEDR_PI);/* 5、设置PI0为上拉。*/val = readl(GPIOI_PUPDR_PI);val &= ~(0X3 << 0); /* bit0:1 清零*/val |= (0x1 << 0); /*bit0:1 设置为01*/writel(val,GPIOI_PUPDR_PI);/* 6、默认关闭LED */val = readl(GPIOI_BSRR_PI);val |= (0x1 << 0);writel(val, GPIOI_BSRR_PI);/* 注册字符设备驱动 *//* 1、创建设备号 */if (newchrled.major) { /* 定义了设备号 */newchrled.devid = MKDEV(newchrled.major, 0);ret = register_chrdev_region(newchrled.devid, NEWCHRLED_CNT, NEWCHRLED_NAME);if(ret < 0) {pr_err("cannot register %s char driver [ret=%d]\n",NEWCHRLED_NAME, NEWCHRLED_CNT);goto fail_map;}} else { /* 没有定义设备号 */ret = alloc_chrdev_region(&newchrled.devid, 0, NEWCHRLED_CNT, NEWCHRLED_NAME); /* 申请设备号 */if(ret < 0) {pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", NEWCHRLED_NAME, ret);goto fail_map;}newchrled.major = MAJOR(newchrled.devid); /* 获取分配号的主设备号 */newchrled.minor = MINOR(newchrled.devid); /* 获取分配号的次设备号 */}printk("newcheled major=%d,minor=%d\r\n",newchrled.major, newchrled.minor); /* 2、初始化cdev */newchrled.cdev.owner = THIS_MODULE;cdev_init(&newchrled.cdev, &newchrled_fops);/* 3、添加一个cdev */ret = cdev_add(&newchrled.cdev, newchrled.devid, NEWCHRLED_CNT);if(ret < 0)goto del_unregister;/* 4、创建类 */newchrled.class = class_create(THIS_MODULE, NEWCHRLED_NAME);if (IS_ERR(newchrled.class)) {goto del_cdev;}/* 5、创建设备 */newchrled.device = device_create(newchrled.class, NULL, newchrled.devid, NULL, NEWCHRLED_NAME);if (IS_ERR(newchrled.device)) {goto destroy_class;}return 0;destroy_class:class_destroy(newchrled.class);
del_cdev:cdev_del(&newchrled.cdev);
del_unregister:unregister_chrdev_region(newchrled.devid, NEWCHRLED_CNT);
fail_map:led_unmap();return -EIO;}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 取消映射 */led_unmap();/* 注销字符设备驱动 */cdev_del(&newchrled.cdev);/* 删除cdev */unregister_chrdev_region(newchrled.devid, NEWCHRLED_CNT); /* 注销设备号 */device_destroy(newchrled.class, newchrled.devid);class_destroy(newchrled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");
设备应用
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"/* 用户数据, 用于写入设备测试 */
static char usrdata[] = {"usr data!"};int main(int argc, char *argv[])
{int fd, retvalue;char *filename;char readbuf[100], writebuf[100];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];/* 打开驱动文件 */fd = open(filename, O_RDWR);if(fd < 0){printf("Can't open file %s\r\n", filename);return -1;}/* 从驱动文件读取数据测试 */if(atoi(argv[2]) == 1){ retvalue = read(fd, readbuf, 50);if(retvalue < 0){printf("read file %s failed!\r\n", filename);}else{printf("read data:%s\r\n",readbuf);}}/* 向设备驱动写数据测试 */if(atoi(argv[2]) == 2){memcpy(writebuf, usrdata, sizeof(usrdata));retvalue = write(fd, writebuf, 50);if(retvalue < 0){printf("write file %s failed!\r\n", filename);}}/* 关闭设备 */retvalue = close(fd);if(retvalue < 0){printf("Can't close file %s\r\n", filename);return -1;}return 0;
}
编译
将以下内容写入MakeFile
KERNELDIR := /home/zuozhongkai/linux/atk-mp1/linux/my_linux/linux-5.4.31 #Linux内核路径
CURRENT_PATH := $(shell pwd)obj-m := newchrled.o #要跟设备驱动代码文件名称一致build: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
编译驱动
make -j16
编译应用文件
arm-none-linux-gnueabihf-gcc xxx.c -o xxx #xxx为应用代码文件名
将编译所得的库文件(如led.ko)和应用文件(如ledApp)放至arm的根目录下,即可在开发板中使用。
代码运行
进入到上述文件所在的目录
depmod # 第一次加载模块时需运行
modprobe led # 加载驱动模块
./ledApp /dev/newchrled 1 # 执行应用代码
pinctrl和gpio子系统
pinctrl
作用:根据所提供的信息配置PIN功能
pinctrl: pin-controller@50002000 {#address-cells = <1>;#size-cells = <1>;compatible = "st,stm32mp157-pinctrl";ranges = <0 0x50002000 0xa400>;interrupt-parent = <&exti>;st,syscfg = <&exti 0x60 0xff>;hwlocks = <&hsem 0 1>;pins-are-numbered;......
};
pinctrl下需要有子节点,子节点中有pins节点,以配置特定的PIN属性
&pinctrl {
......m_can1_pins_a: m-can1-0 {pins1 {pinmux = <STM32_PINMUX('H', 13, AF9)>; /* CAN1_TX */slew-rate = <1>;drive-push-pull;bias-disable;};pins2 {pinmux = <STM32_PINMUX('I', 9, AF9)>; /* CAN1_RX */bias-disable;};};
};
pins属性
- pinmux 属性
pinmux = <STM32_PINMUX(port, line, mode)>;
#例
pinmux = <STM32_PINMUX('H', 13, AF9)>;
port:表示用那一组 GPIO(例:H 表示为 GPIO 第 H 组,也就是 GPIOH)
line:表示这组 GPIO 的第几个引脚(例:13 表示为 GPIOH_13,也就是 PH13)
mode:表示当前引脚要做那种复用功能(例:AF9 表示为用第 9 个复用功能)
- 电气属性配置

gpio子系统
作用:用于初始化 GPIO 并且提供相应的 API 函数,比如设置 GPIO为输入输出,读取 GPIO 的值等。
创建节点
led {compatible = "atk,led";gpio = <&gpioi 0 GPIO_ACTIVE_LOW>;status = "okay";
};
API函数
int gpio_request(unsigned gpio, const char *label) // 申请GPIO管脚
void gpio_free(unsigned gpio) // 释放GPIO
int gpio_direction_input(unsigned gpio) // 设置GPIO为输入
int gpio_direction_output(unsigned gpio, int value) // 设置GPIO为输出
int __gpio_get_value(unsigned gpio) // 获取GPIO当前值
void __gpio_set_value(unsigned gpio, int value) // 设定GPIO当前值
of_gpio_named_count:用于获取设备树某个属性里面定义了几个 GPIO 信息
int of_gpio_named_count(struct device_node *np, const char *propname)
of_gpio_count:和 of_gpio_named_count 函数一样,但是不同的地方在于,此函数统计的是“gpios”这个属性的 GPIO 数量,而 of_gpio_named_count 函数可以统计任意属性的 GPIO 信息
int of_gpio_count(struct device_node *np)
of_get_named_gpio:获取 GPIO 编号
int of_get_named_gpio(struct device_node *np,const char *propname,int index)
相关文章:
【嵌入式Linux学习笔记】Linux驱动开发
Linux系统构建完成后,就可以基于该环境方便地进行开发了,相关的开发流程与MCU类似,但是引入了设备树的概念,编写应用代码要相对复杂一点。但是省去了很多配置工作。 学习视频地址:【正点原子】STM32MP157开发板 字符…...
上海理工大学校内选拔赛(同步赛)(H题)(线段树))
2023年中国高校计算机大赛-团队程序设计天梯赛(GPLT)上海理工大学校内选拔赛(同步赛)(H题)(线段树)
又到了万物复苏的季节,家乡的苹果树结果了。像往常一样小龙同学被叫回家摘苹果。 假设需要采摘的一棵树上当前有a颗苹果,那么小龙会采摘⌈a/3⌉颗苹果,其中⌈x⌉表示不小于x的最小整数。 但是,为了可持续发展,若a小于1…...
)
Linux内核Thermal框架详解十三、Thermal Governor(3)
接前一篇文章Linux内核Thermal框架详解十二、Thermal Governor(2) 二、具体温控策略 上一篇文章介绍并详细分析了bang_bang governor的源码。本文介绍第2种温控策略:fair_share。 2. fair_share fair_share governor总的策略是频率档位⽐较…...
)
TikTok品牌出海创世纪(二)
目录 1.推荐算法打造王者品牌 2.品牌聚焦海外Z群体 3.持续扩展应用场景 加速品牌全球化传播 品牌聚焦海外Z群体 “这个地球上,三分之二的人都在用Facebook“,这是对Facebook曾经统治地位最直观的描述。 但如今,这家全球社交媒体巨头的光环正…...
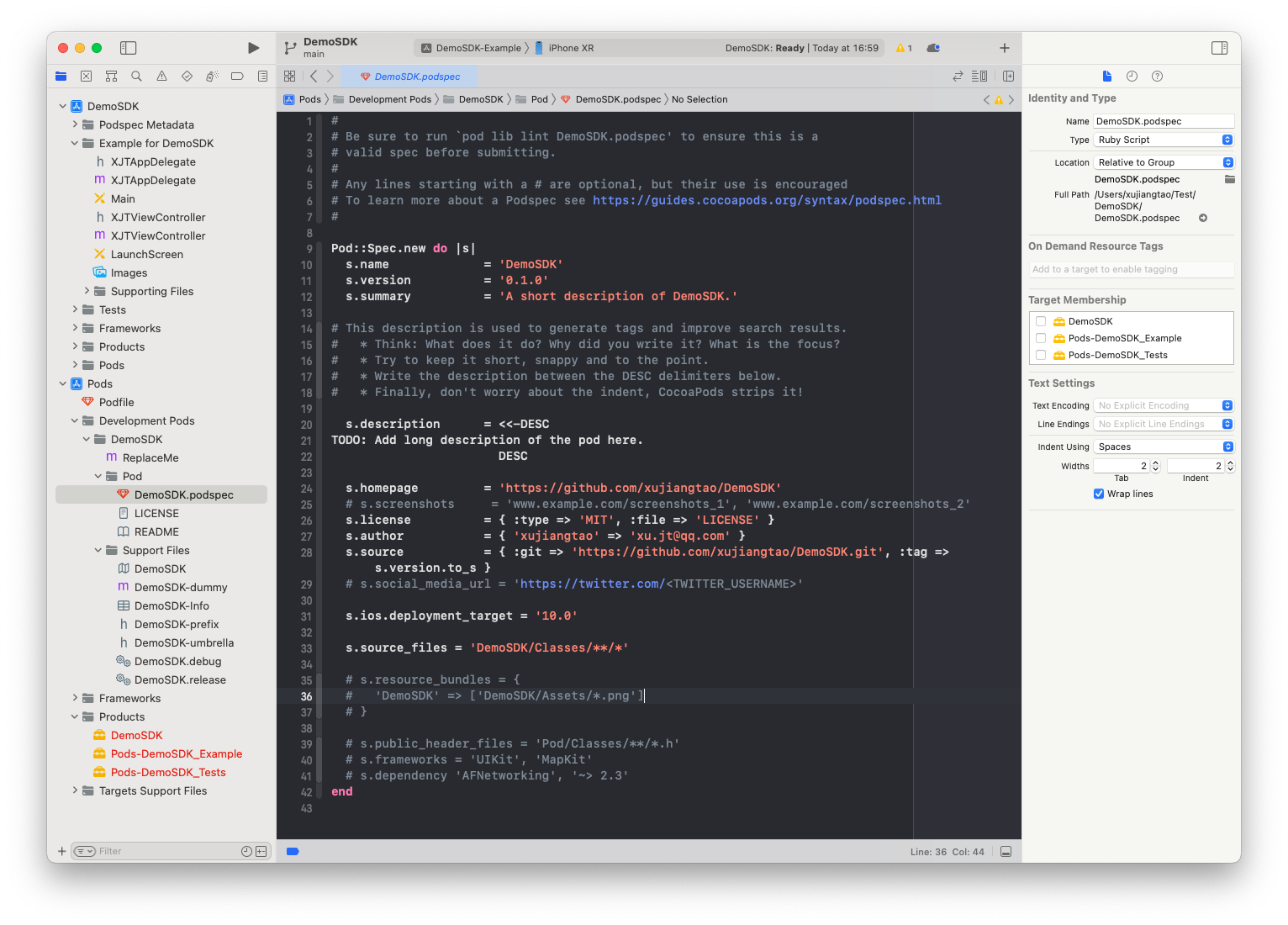
iOS中SDK开发 -- cocoapods库创建
在iOS项目中,经常使用cocoadpods来进行依赖管理以及三方库引入等。引入的三方库一般会有几种形式:一、在Pods目录下可以直接看到源代码的开源库,如AFNetworking,Masonry等常见开源库。二、在Pods目录下拉取的项目文件只能看到对应…...

2023年了,还是没学会内卷....
先做个自我介绍:我,普本,通信工程专业,现在飞猪干软件测试,工作时长两年半。 回望疫情纪元,正好是实习 毕业这三年。要说倒霉也是真倒霉,互联网浪潮第三波尾巴也没抓住,狗屁造富神…...
chatGPT爆火,什么时候中国能有自己的“ChatGPT“
目录 引言 一、ChatGPT爆火 二、中国何时能有自己的"ChatGPT" 三、为什么openai可以做出chatGPT? 四、结论 引言 随着人工智能技术的不断发展,自然语言处理技术也逐渐成为了研究的热点之一。其中,ChatGPT作为一项领先的自然语言处理技术…...
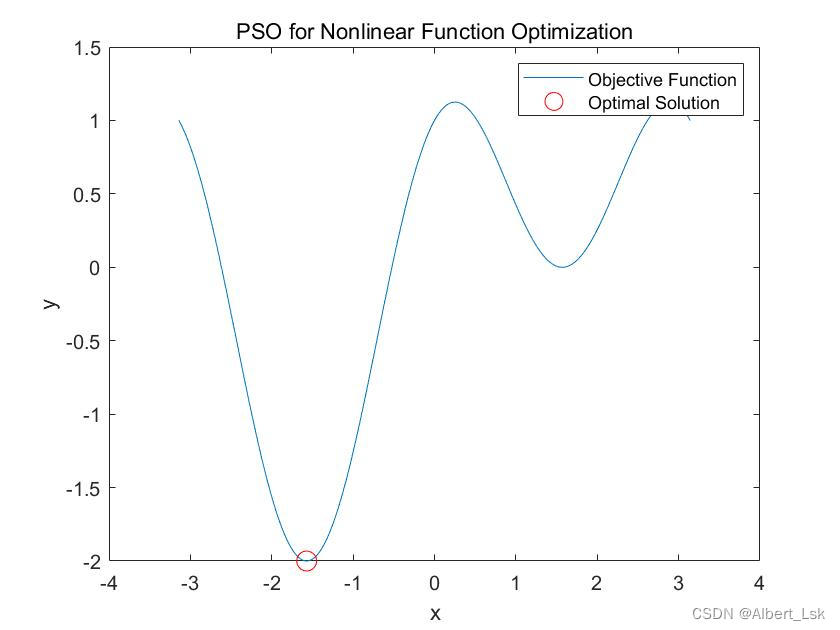
【Matlab算法】粒子群算法求解一维非线性函数问题(附MATLAB代码)
MATLAB求解一维非线性函数问题前言正文函数实现(可视化处理)可视化结果前言 一维非线性函数是指函数的自变量和因变量都是一维实数,而且函数的形式是非线性的,也就是不符合线性函数的形式。在一维非线性函数中,自变量…...
2023 最新发布超全的 Java 面试八股文,整整 1000道面试题,太全了
作为一名优秀的程序员,技术面试都是不可避免的一个环节,一般技术面试官都会通过自己的方式去考察程序员的技术功底与基础理论知识。 2023 年的互联网行业竞争越来越严峻,面试也是越来越难,很多粉丝朋友私信希望我出一篇面试专题或…...

产品经理面经|当面试官问你还有什么问题?
相信很多产品经理在跳槽面试的时候,在面试尾声都会遇到这样的环节,面试官会问你有什么问题要问的,一般来说大家都能随时随地甩出几个问题来化解,但其实在这个环节对于应聘者来说也是一个很好的机会来展现自己的能力,甚…...

单链表的基本操作
目录 一.链表的基本概念和结构 二.链表的分类 三.单链表的基本操作 1.创建一个节点 2.打印 3.尾插 4.头插 5.尾删 6.头删 7.查找 8.指定位置插入 9.指定位置删除 10.销毁 一.链表的基本概念和结构 概念:链表是一种物理存储结构上非连续、非顺序的存储结…...
)
【微信小程序-原生开发】系列教程目录(已完结)
01-注册登录账号,获取 AppID、下载安装开发工具、创建项目、上传体验 https://sunshinehu.blog.csdn.net/article/details/128663679 02-添加全局页面配置、页面、底部导航 https://sunshinehu.blog.csdn.net/article/details/128705866 03-自定义底部导航&#x…...
JavaEE--Thread 类的基本用法(不看你会后悔的嘿嘿)
Thread类是JVM用来管理线程的一个类,换句话说,每个线程都唯一对应着一个Thread对象. 因此,认识和掌握Thread类弥足重要. 本文将从 线程创建线程中断线程等待线程休眠获取线程实例 等方面来进行具体说明. 1)线程创建 方法1:通过创建Thread类的子类并重写run () 方法 class M…...

MySQL数据库基本使用(二)-------数据库及表的增删改查及字符集修改
1.MySQL数据库的使用演示 1.1创建自己的数据库 命令格式如下(创建的数据库名称不能与已经存在的数据库重名): mysql> create database 数据库名;例如: mysql> create database atguigudb; #创建atguigudb数据库…...
)
互联网摸鱼日报(2023-03-17)
互联网摸鱼日报(2023-03-17) InfoQ 热门话题 开源新生代的成长之路:从校园到开源,需要迈过哪些挑战? 从 Clickhouse 到 Apache Doris,慧策电商 SaaS 高并发数据服务的改造实践 刚刚,百度文心…...
【前后端】低代码平台Jeecg-Boot 3.2宝塔云服务器部署流程
1 后端 部署流程 修改配置文件 更改数据库、redis的配置。 在system子模块中的target文件夹下生成 jar 包jeecg-boot-module-system-3.2.0.jar。 复制到云服务器 生成数据库 在这里插入图片描述 使用命令运行后端程序 java -jar ./jeecg-boot-module-system-3.2.0.jar宝…...

leetcode todolist
数组 数组的改变、移动 453. 最小移动次数使数组元素相等 665. 非递减数列 283. 移动零 数组的旋转 189. 旋转数组 396. 旋转函数 统计数组中的元素 645. 错误的集合 697. 数组的度 448. 找到所有数组中消失的数字 442. 数组中重复的数据 41. 缺失的第一个正数 数…...

改进YOLO系列 | CVPR2023最新 PConv | 提供 YOLOv5 / YOLOv7 / YOLOv7-tiny 模型 YAML 文件
DWConv是Conv的一种流行变体,已被广泛用作许多神经网络的关键构建块。对于输入 I ∈ R c h w I \in R^{c \times h \times w} I∈...
像ChatGPT玩转Excel数据
1.引言 最近ChatGPT的出现,把人工智能又带起了一波浪潮。机器人能否替代人类又成了最近热门的话题。 今天我们推荐的一个玩法和ChatGPT有点不一样。我们的课题是“让用户可以使用自然语言从Excel查询到自己想要的数据”。 要让自然语言可以从Excel中查数据&#…...
云原生之docker容器监控详解(cAdvisor、node exporter、prometheus)
docker容器监控一、前言二、cAdvisor2.1、安装cAdvisor2.2、使用Prometheus监控cAdvisor2.3、cAdvisor暴露的Prometheus指标三、Node Exporter3.1、安装Node Exporter3.2、指标四、Prometheus4.1、安装4.2、规则配置4.3、报警管理器五、grafana一、前言 cAdvisor源码 node exp…...

【SITS大会独家内幕】:20年技术出版人亲述图书签售背后的5大行业趋势与3个未公开合作线索
更多请点击: https://intelliparadigm.com 第一章:【SITS大会独家内幕】:20年技术出版人亲述图书签售背后的5大行业趋势与3个未公开合作线索 在2024年SITS(Software Innovation & Tech Symposium)大会主会场外的“…...

5分钟掌握Mermaid Live Editor:免费在线图表编辑终极指南
5分钟掌握Mermaid Live Editor:免费在线图表编辑终极指南 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-edi…...

从SELinux到AppArmor:聊聊Linux内核安全模块LSM的实战选择与避坑指南
从SELinux到AppArmor:Linux内核安全模块实战选择与避坑指南 在当今云计算和容器化技术蓬勃发展的背景下,Linux系统的安全性变得前所未有的重要。作为系统管理员或DevOps工程师,我们常常需要在安全性和易用性之间寻找平衡点。Linux内核安全模块…...

N_m3u8DL-RE:如何用现代下载工具解决流媒体下载三大技术难题?
N_m3u8DL-RE:如何用现代下载工具解决流媒体下载三大技术难题? 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/…...
)
【仅限首批200家认证企业】SITS 2026 Embedding性能基线报告(含Top5厂商真实benchmark对比)
更多请点击: https://intelliparadigm.com 第一章:AI原生Embedding优化:SITS 2026语义搜索性能提升技巧 在 SITS 2026(Semantic Indexing & Text Search)基准测试中,AI 原生 Embedding 模型的推理延迟…...

2026届学术党必备的十大降重复率神器推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 已正式被推出名为AIGC检测服务系统的是中国知网,其目的在于识别学术文献里由人工…...

NoFences:终极免费开源桌面分区工具,如何3分钟打造高效Windows工作空间
NoFences:终极免费开源桌面分区工具,如何3分钟打造高效Windows工作空间 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否厌倦了Windows桌面上散乱…...

如何用智能图像分层工具Layerdivider:从单张图片到专业PSD的完整指南
如何用智能图像分层工具Layerdivider:从单张图片到专业PSD的完整指南 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾为将单张插画转…...
)
告别访问失败!手把手教你用中标麒麟OS挂载Win10的SMB共享(附终端挂载命令)
中标麒麟OS与Win10 SMB共享深度配置指南:从原理到实战避坑 在跨平台协作成为常态的今天,Linux与Windows系统间的文件共享已成为运维人员的必备技能。中标麒麟作为国产操作系统的代表,其与Windows的SMB协议互通却常因配置细节不到位而引发&quo…...

3步实现企业级智能地址解析:Java开发者的终极效率提升指南
3步实现企业级智能地址解析:Java开发者的终极效率提升指南 【免费下载链接】address-parse Java 版智能解析收货地址 项目地址: https://gitcode.com/gh_mirrors/addr/address-parse 在电商、物流、外卖等数字化业务高速发展的今天,地址解析已成为…...