【单目3D检测】smoke(1):模型方案详解
纵目发表的这篇单目3D目标检测论文不同于以往用2D预选框建立3D信息,而是采取直接回归3D信息,这种思路简单又高效,并不需要复杂的前后处理,而且是一种one stage方法,对于实际业务部署也很友好。

- 题目:SMOKE:Single-Stage Monocular 3D Object Detection via Keypoint Estimation
- 代码:https://github.com/lzccccc/SMOKE
Introduction
2D目标检测目前已经在精度和速度上都取得了不错的成绩,而3D目标检测由于需要同时估计出目标的位置与姿态,因此相比2D是一个更具挑战的方向。
目前性能最好的3D目标检测还是需要依赖激光雷达的点云或者点云+图像融合,考虑到成本因素,仅依靠单目摄像头的3D目标检测还是非常值得研究的。
本作有以下几个贡献点:
- 提出了一个one-stage单目3D检测方法,思路简答,且end-to-end。
- 3D框8个角点的计算使用了多种方式得到,每种方式都参与了loss的计算,使训练更容易收敛。
- 在KITTI数据集上达到了SOTA。
Detection Problem

SMOKE Approach

Backbone
主干网络选择使用DLA-34,其中部分卷积换成了DCN,最后的输出相对于原始图4次下采样的特征图。论文还将BN换成了GN(GroupNorm),因为GN对batch size的大小不那么敏感,且在训练中对噪声更鲁棒。
3D Detection Network
head部分一共两条分支,一条用于检测目标中心点位置同时分类,另一条回归目标的3D信息。
Keypoint Branch
中心点的估计与CenterNet那片论文的思路相似,不同的是CenterNet里用的是2D框的中心点,而这里用的是3D框的中心点在图像上的投影点,如下图所示:

Regression Branch

根据深度信息,投影点(x,y)坐标,和相机参数,可计算得到3D中心点坐标


预测长宽高,有点像anchor的思想

偏航角:ray到Z轴角度



Loss Function
偏航角pred与尺寸gt,坐标gt构成的3d box与gt的回归loss
偏航角gt与尺寸pred,坐标gt构成的3d box与gt的回归loss
偏航角gt与尺寸gt,坐标pred构成的3d box与gt的回归loss
Keypoint Classification分支的loss跟CenterNet中一样,用的是focal loss。
Regression分支的loss计算比较有新意,没有采取直接计算τ \tauτ中8个参数的loss,而是通过在角度、尺寸、坐标位置三种分支下得到的3D框的8个角点去和真值比较计算loss。
总loss:

# mmdetection3d/mmdet3d/models/dense_heads/smoke_mono3d_head.py
# 角度分支下计算得到的3D框,所谓角度分支即只有角度用的是预测值,而坐标位置和尺寸两个用的是真值
bbox3d_yaws = self.bbox_coder.encode(gt_locations, gt_dimensions, orientations, img_metas)
# 尺寸分支下计算得到的3D框
bbox3d_dims = self.bbox_coder.encode(gt_locations, dimensions, gt_orientations, img_metas)
# 坐标位置分支下计算得到的3D框
bbox3d_locs = self.bbox_coder.encode(locations, gt_dimensions, gt_orientations, img_metas)
...
...
# 三种分支下分别计算推理出的8个角点的和真值8个角点的loss
loss_bbox_oris = self.loss_bbox(pred_bboxes['ori'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])loss_bbox_dims = self.loss_bbox(pred_bboxes['dim'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])loss_bbox_locs = self.loss_bbox(pred_bboxes['loc'].corners[reg_inds, ...], target_labels['gt_cors'][reg_inds, ...])loss_bbox = loss_bbox_dims + loss_bbox_locs + loss_bbox_oris
Conclusion
纵目发表的这篇单目3D目标检测论文不同于以往用2D预选框建立3D信息,而是采取直接回归3D信息,这种思路简单又高效,并不需要复杂的前后处理,而且是一种one stage方法,对于实际业务部署也很友好。
参考:https://blog.csdn.net/qq_30483585/article/details/124954023
相关文章:
【单目3D检测】smoke(1):模型方案详解
纵目发表的这篇单目3D目标检测论文不同于以往用2D预选框建立3D信息,而是采取直接回归3D信息,这种思路简单又高效,并不需要复杂的前后处理,而且是一种one stage方法,对于实际业务部署也很友好。 题目:SMOKE&…...

数据库系统概论:数据库系统的锁机制
引言 锁是计算机协调多个进程或线程并发访问某一资源的机制。在数据库中,数据作为一种共享资源,其并发访问的一致性和有效性是数据库必须解决的问题。锁机制通过对数据库中的数据对象(如表、行等)进行加锁,以确保在同…...
-- ADB获取设备信息)
Django+vue自动化测试平台(28)-- ADB获取设备信息
概述 adb的全称为Android Debug Bridge,就是起到调试桥的作用。通过adb可以在Eclipse中通过DDMS来调试Android程序,说白了就是调试工具。 adb的工作方式比较特殊,采用监听Socket TCP 5554等端口的方式让IDE和Qemu通讯,默认情况下…...

RESTful API设计指南:构建高效、可扩展和易用的API
文章目录 引言一、RESTful API概述1.1 什么是RESTful API1.2 RESTful API的重要性 二、RESTful API的基本原则2.1 资源导向设计2.2 HTTP方法的正确使用 三、URL设计3.1 使用名词而非动词3.2 使用复数形式表示资源集合 四、请求和响应设计4.1 HTTP状态码4.2 响应格式4.2.1 响应实…...

npm下载的依赖包版本号怎么看
npm下载的依赖包版本号怎么看 版本号一般分三个部分,主版本号、次版本号、补丁版本号。 主版本号:一般依赖包发生重大更新时,主版本号才回发生变化,如Vue2.x到Vue3.x。次版本号:当依赖包中发生了一些小变化ÿ…...
css前端面试题
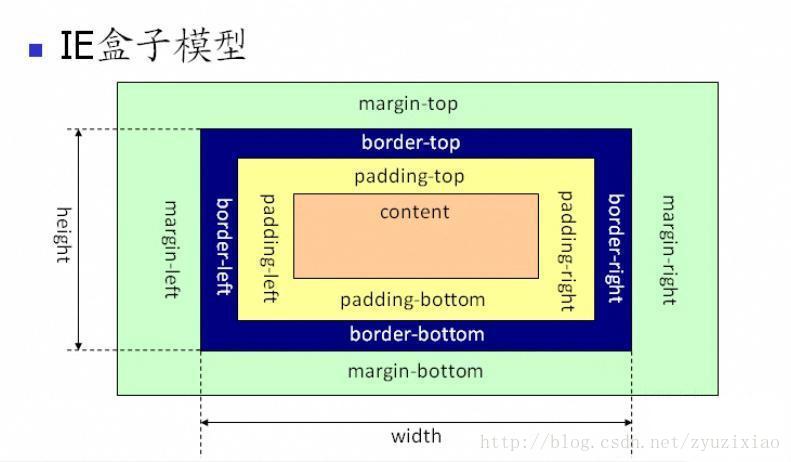
1.什么是css盒子模型? 盒子模型包含了元素内容(content)、内边距(padding)、边框(border)、外边距(margin)几个要素。 标准盒子模型和IE盒子模型的区别在于其对元素的w…...

Vue从零到实战
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 非常期待和您一起在这个小…...

【Chatgpt大语言模型医学领域中如何应用】
随着人工智能技术 AI 的不断发展和应用,ChatGPT 作为一种强大的自然语言处理技术,无论是 自然语言处理、对话系统、机器翻译、内容生成、图像生成,还是语音识别、计算机视觉等方面,ChatGPT 都有着广泛的应用前景。特别在临床医学领…...
)
ES6 正则的扩展(十九)
1. 正则表达式字面量改进 特性:在 ES6 中,正则表达式字面量允许在字符串中使用斜杠(/)作为分隔符。 用法:简化正则表达式的书写。 const regex1 /foo/; const regex2 /foo/g; // 全局搜索2. u 修饰符(U…...

<数据集>钢铁缺陷检测数据集<目标检测>
数据集格式:VOCYOLO格式 图片数量:1800张 标注数量(xml文件个数):1800 标注数量(txt文件个数):1800 标注类别数:6 标注类别名称:[crazing, patches, inclusion, pitted_surface, rolled-in_scale, scr…...

Kafka系列之:Kafka存储数据相关重要参数理解
Kafka系列之:Kafka存储数据相关重要参数理解 一、log.segment.bytes二、log.retention.bytes三、日志段四、log.retention.check.interval.ms五、数据底层文件六、index、log、snapshot、timeindex、leader-epoch-checkpoint、partition.metadata一、log.segment.bytes 参数lo…...

Template execution failed: ReferenceError: name is not defined
问题 我们使用了html-webpack-plugin(webpack)进行编译html,导致的错误。 排查结果 连接地址 html-webpack-plugin版本低(2.30.1),html模板里面不能有符号,注释都不行 // var reg new RegExp((^|&)${name}([^&…...

CVE-2024-24549 Apache Tomcat - Denial of Service
https://lists.apache.org/thread/4c50rmomhbbsdgfjsgwlb51xdwfjdcvg Apache Tomcat输入验证错误漏洞,HTTP/2请求的输入验证不正确,会导致拒绝服务,可以借助该漏洞攻击服务器。 https://mvnrepository.com/artifact/org.apache.tomcat.embed/…...

Linux下如何安装配置Graylog日志管理工具
Graylog是一个开源的日志管理工具,可以帮助我们收集、存储和分析大量的日志数据。它提供了强大的搜索、过滤和可视化功能,可以帮助我们轻松地监控系统和应用程序的运行情况。 在Linux系统下安装和配置Graylog主要包括以下几个步骤: 准备安装…...

「MQTT over QUIC」与「MQTT over TCP」与 「TCP 」通信测试报告
一、结论 在实车5G测试中「MQTT Over QUIC」整体表现优于「TCP」,可在系统架构升级时采用MQTT Over QUIC替换原有的TCP通讯;从实现原理上基于QUIC比基于TCP在弱网、网络抖动导致频繁重连场景延迟更低。 二、测试方案 网络类型:实车5G、实车…...

获取磁盘剩余容量-----c++
获取磁盘剩余容量 #include <filesystem>struct DiskSpaceInfo {double total;double free;double available; };DiskSpaceInfo getDiskSpace(const std::string& path) {std::filesystem::space_info si std::filesystem::space(path);DiskSpaceInfo info;info.…...

AI算法24-决策树C4.5算法
目录 决策树C4.5算法概述 决策树C4.5算法简介 决策树C4.5算法发展历史 决策树C4.5算法原理 信息熵(Information Entropy) 信息增益(Information Gain) 信息增益比(Gain Ratio) 决策树C4.5算法改进 …...
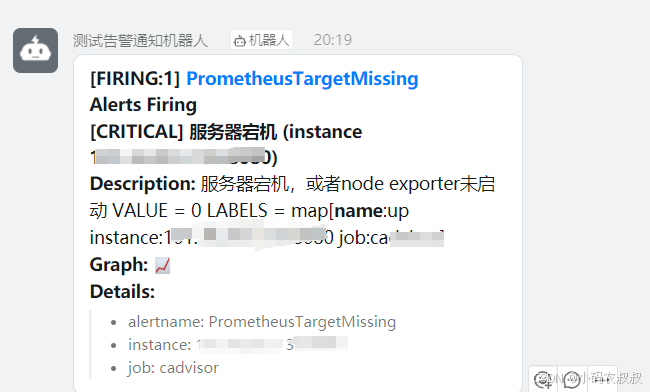
【云原生】Prometheus整合Alertmanager告警规则使用详解
目录 一、前言 二、Altermanager概述 2.1 什么是Altermanager 2.2 Altermanager使用场景 三、Altermanager架构与原理 3.1 Altermanager使用步骤 3.2 Altermanager工作机制 3.3 Altermanager在Prometheus中的位置 四、Altermanager部署与接入Prometheus 4.1 Altermana…...

C++ :友元类
友元类的概念和使用 (1)将类A声明为B中的friend class后,则A中所有成员函数都成为类B的友元函数了 (2)代码实战:友元类的定义和使用友元类是单向的 (3)友元类是单向的,代码实战验证 互为友元类 (1)2个类可以互为友元类,代码实战…...

【整理了一些关于使用swoole使用的解决方案】
目录 如何监控和分析 Swoole 服务器的性能瓶颈? 在进行 Swoole 服务器性能优化时,有哪些常见的错误和陷阱需要避免? 除了 Swoole,还有哪些 PHP 框架或技术可以用于构建高并发的 Web 应用? Swoole 同步请求在高并发…...

自动驾驶汽车保险七大议题:从技术视角看责任转移与系统设计
1. 自动驾驶汽车保险的七个核心议题:从工程师视角看技术与责任的碰撞作为一名在汽车电子和嵌入式系统领域摸爬滚打了十几年的工程师,我亲眼见证了从ABS到自适应巡航,再到今天各种L2辅助驾驶的演进。每当和圈内朋友聊起全自动驾驶,…...

无线TDoA定位中的硬件偏差问题与DTB校准方法
1. 无线TDoA定位中的硬件偏差问题解析在无线定位领域,时间差到达(Time Difference of Arrival, TDoA)技术因其能够消除接收机时钟偏差而备受青睐。然而,这项技术在实际应用中面临一个关键挑战:节点硬件引入的系统性偏差…...

从NASA音频设计看极端约束下的工程权衡:可靠性如何塑造系统特性
1. 项目概述:从一次论坛讨论说起如果你和我一样,是个对技术细节有强迫症的老工程师,或者是个音频发烧友,那你肯定也曾在看NASA的航天直播或纪录片时,皱起眉头嘀咕过:“这声音怎么这么差?” 那种…...

构建支持多模型切换的智能内容审核与打标系统
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 构建支持多模型切换的智能内容审核与打标系统 在用户生成内容平台中,视频、图文等内容的审核与分类打标是核心运营环节…...

联发科与威睿电通合作:深度解析全球模式SoC如何实现CDMA与LTE融合
1. 项目概述:一次芯片设计领域的“握手”每年的国际消费电子展(CES)总是热闹非凡,各种炫目的消费电子产品占据着舞台中央。但作为从业者,我们更关注的是那些隐藏在光鲜产品背后、驱动一切的技术基石。2014年的CES上&am…...

如何利用The Incredible PyTorch离线文档:深度学习者的终极学习宝典
如何利用The Incredible PyTorch离线文档:深度学习者的终极学习宝典 【免费下载链接】the-incredible-pytorch The Incredible PyTorch: a curated list of tutorials, papers, projects, communities and more relating to PyTorch. 项目地址: https://gitcode.…...

【Prometheus】如何诊断 Prometheus 查询缓慢或超时的问题?
Prometheus 查询性能深度调优:从高基数陷阱到 TSDB 存储引擎的全链路诊断 用户问题原文:“如何诊断 Prometheus 查询缓慢或超时的问题?” 在支撑单集群500万+时间序列的生产环境中,Prometheus 查询性能是 SRE 团队的生命线。一次缓慢的查询不仅会拖垮 Grafana 面板,更可能…...

Credenza:现代化开发凭证管理工具的设计原理与实战应用
1. 项目概述:一个现代化的凭证管理工具 最近在整理自己的开发环境时,又被各种API密钥、数据库密码、服务令牌给搞烦了。这些敏感信息散落在不同的 .env 文件、配置脚本甚至代码注释里,每次换机器或者和新同事协作都得小心翼翼,生…...

告别300MB限制!用ZotFile插件+坚果云,打造你的免费Zotero文献同步方案
告别300MB限制!用ZotFile插件坚果云打造高效文献同步方案 在学术研究的日常中,文献管理工具Zotero无疑是许多人的得力助手。然而,免费账户仅有的300MB存储空间,对于需要处理大量PDF文献的研究者来说,往往显得捉襟见肘。…...

如何通过抖店订单接口实现订单状态管理与履约自动化?
对于电商业务管理系统的开发者而言,订单状态的管理是电商履约流程中最核心的环节。当消费者在抖音小店完成下单后,订单会经历支付、发货、收货等多个状态阶段,每个阶段都需要系统做出相应的业务响应。抖店开放平台提供的订单接口体系…...