Vbox虚拟机+Ubuntu motest测试drm
1. 效果演示
大家做学习drm的时候,没有硬件测试平台不方便测试,这里给大家演示下如何基于Vbox虚拟机+Ubuntu测试drm的一些功能,先看下演示视频。
没有光标测试:
demo_vwmfgx_test_drm
带有光标测试:
demo_vwmfgx_drm_with_cursor
可以看到,有个半透明的小方块就是光标,使用虚拟机的方式,drm cursor相关的效果也可以实际体验了^_^.
左边是ssh登录虚拟机执行modetest命令,右边是实时效果。这个应该是目前没有硬件的条件下最直观的drm测试方法了。2.测试方法
Vbox虚拟机+Ubuntu16/18都可以测试。
测试的前提是Vbox+Ubuntu已经安装好了,并且能够通过ssh登录虚拟机里面的Ubuntu。
具体测试步如下:
0. 安装drm相关的package
sudo apt install libdrm-dev
没有相关packge的可以直接下载libdrm 源码编译安装 1. 进入linux命令行模式Ubunt18.04
在Linux系统中,可以使用以下快捷键来进入命令行模式:
Ctrl + Alt + F1:GUI模式
Ctrl + Alt + F6:命令行模式Ubunt16.04
在Linux系统中,可以使用以下快捷键来进入命令行模式:
Ctrl + Alt + F1:命令行模式
Ctrl + Alt + F7:GUI模式2.进入命令行模式,命令行模式选择一个用户登录3.ssh 登录虚拟机的Ubuntu执行下面脚本
执行shell脚本进行测试
Ubunt18
detst_no_cursor_test_all_disp_modes_ubuntu_18.sh
Ubunt16
detst_no_cursor_test_all_disp_modes_ubuntu_16.sh4.
执行完测试后,快捷键返回GUI模式3. Vbox虚拟机+Ubuntu 为什么能做这个测试?
测试的命令如下:
modetest -M vmwgfx -s 24@27:1920x1200-60 -F tiles
测试其实是使用vmwgfx这个虚拟显卡驱动,提供对应的的drm接口。vmwgfx 是虚拟机虚拟显卡驱动,linux内核自带了这个驱动。
如果这个驱动没有安装,可以安装VirtualBox的虚拟机增强功能试试。
安装这个功能可以百度下就可以。查询自己系统有没有有安装vmwgfx这个驱动的方法如下
如果没有任何显示则没有安装,也就不能进行这个实验了。
要确定vmwgfx这个驱动安装后才能做这个实验。dmesg | grep vmwgfx
[ 1.502045] [drm] Initialized vmwgfx 2.9.0 20150810 for 0000:00:02.0 on minor 0vmxgfx 在linux内核源码的路径,感兴趣的可以看看如何实现的
\linux-5.4.70\drivers\gpu\drm\vmwgfx
4.资源共享及测试脚本说明
测试脚本下载链接
Ubunt16测试drm脚本,不带有cursor
test_drm_modetst_no_cursor_test_all_disp_modes_ubuntu_16.shUbunt16测试drm脚本,带有cursor
test_drm_modetst_with_cursor_ubuntu_16.shUbunt18测试drm脚本,不带有cursor
test_drm_modetst_no_cursor_test_all_disp_modes_ubuntu_18.sh具体效果大家可以实际运行看下,一切顺利就是我演示视频中的效果相关文章:

Vbox虚拟机+Ubuntu motest测试drm
1. 效果演示 大家做学习drm的时候,没有硬件测试平台不方便测试,这里给大家演示下如何基于Vbox虚拟机Ubuntu测试drm的一些功能,先看下演示视频。 没有光标测试: demo_vwmfgx_test_drm 带有光标测试: demo_vwmfgx_drm_with_cursor 可以看到,有…...
几何 15 转换)
ArcGIS Pro SDK (九)几何 15 转换
ArcGIS Pro SDK (九)几何 15 转换 文章目录 ArcGIS Pro SDK (九)几何 15 转换1 创建地理转换2 创建复合地理变换3 创建投影转换4 创建高压基准变换5 创建复合高压基准变换6 决定转换7 地图点 - 地理坐标字符串转换 环境࿱…...

Spring IOC DI --- 认识IOC DI
T04BF 👋专栏: 算法|JAVA|MySQL|C语言 🫵 今天你敲代码了吗 文章目录 认识Ioc & DIIoc是什么?DI是什么? 认识Ioc & DI 我们知道,Spring 是一个开源框架,让我们的开发更加简单.但是更加具体来说,实际上Spring 是包含了众多工具方法的Ioc容器 …...

常用的python程序汇总——入门级
只用于记录最近的一些日常程序。 目录 前言 一、文件和目录管理 1.读取文件结构 读取所有文件夹和文件 读取到N级子文件夹和文件 只读取到N级子文件夹 2.遍历文件并处理(复制、删除) 说明: 二、数据分析和处理 三、数据可视化 四、…...

被问到MQ消息已丢失,该如何处理?
在分布式系统中,消息中间件(如 RabbitMQ、RocketMQ、Kafka、Pulsar 等)扮演着关键角色,用于解耦生产者和消费者,并确保数据传输的可靠性和顺序性。尽管我们通常会采取多种措施来防止消息丢失,如消息持久化、…...
)
open3d:ransac分割多个平面(源码)
1、背景介绍 随机采样一致性算法(RANSAC Random Sample Consensus)是一种迭代的参数估计算法,主要用于从包含大量噪声数据的样本中估计模型参数。其核心思想是通过随机采样和模型验证来找到数据中最符合模型假设的点。因此,只要事先给定要提取的参数模型,即可从点云中分割…...
Github 2024-07-17 开源项目日报 Top10
根据Github Trendings的统计,今日(2024-07-17统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量非开发语言项目3Python项目3Rust项目2TypeScript项目2MDX项目1项目化学习 创建周期:2538 天协议类型:MIT LicenseStar数量:161973 个Fork数量…...

vue3中Composition API写法 <script setup>标签中哪些可以不用导入即可使用?
在 Vue 3 中使用 <script setup> 时,确实有一些全局的 API 和宏可以直接使用,而不需要显式地从 vue 包中导入它们。这是因为 <script setup> 是专门为了提供更简洁的组件编写方式而设计的,它内部利用了编译时的语法糖。 以下是在…...

Facebook Dating:社交平台的约会新体验
随着社交媒体的普及和技术的发展,传统的社交方式正在经历革新,尤其是在约会这个领域。Facebook作为全球领先的社交平台,推出了Facebook Dating,旨在为用户提供一个全新的约会体验。本文将探讨Facebook Dating如何重新定义社交平台…...

【系统架构设计 每日一问】五 搜索型业务,采用MySQL+ES,如何保证数据一致性
将数据从MySQL同步到Elasticsearch(ES)中并保证一致性是一个常见的需求,特别是在需要快速全文搜索和分析功能的应用中。以下是一些常见的方法和实践来确保数据一致性: 1. 使用双写策略 描述:在应用程序层面ÿ…...
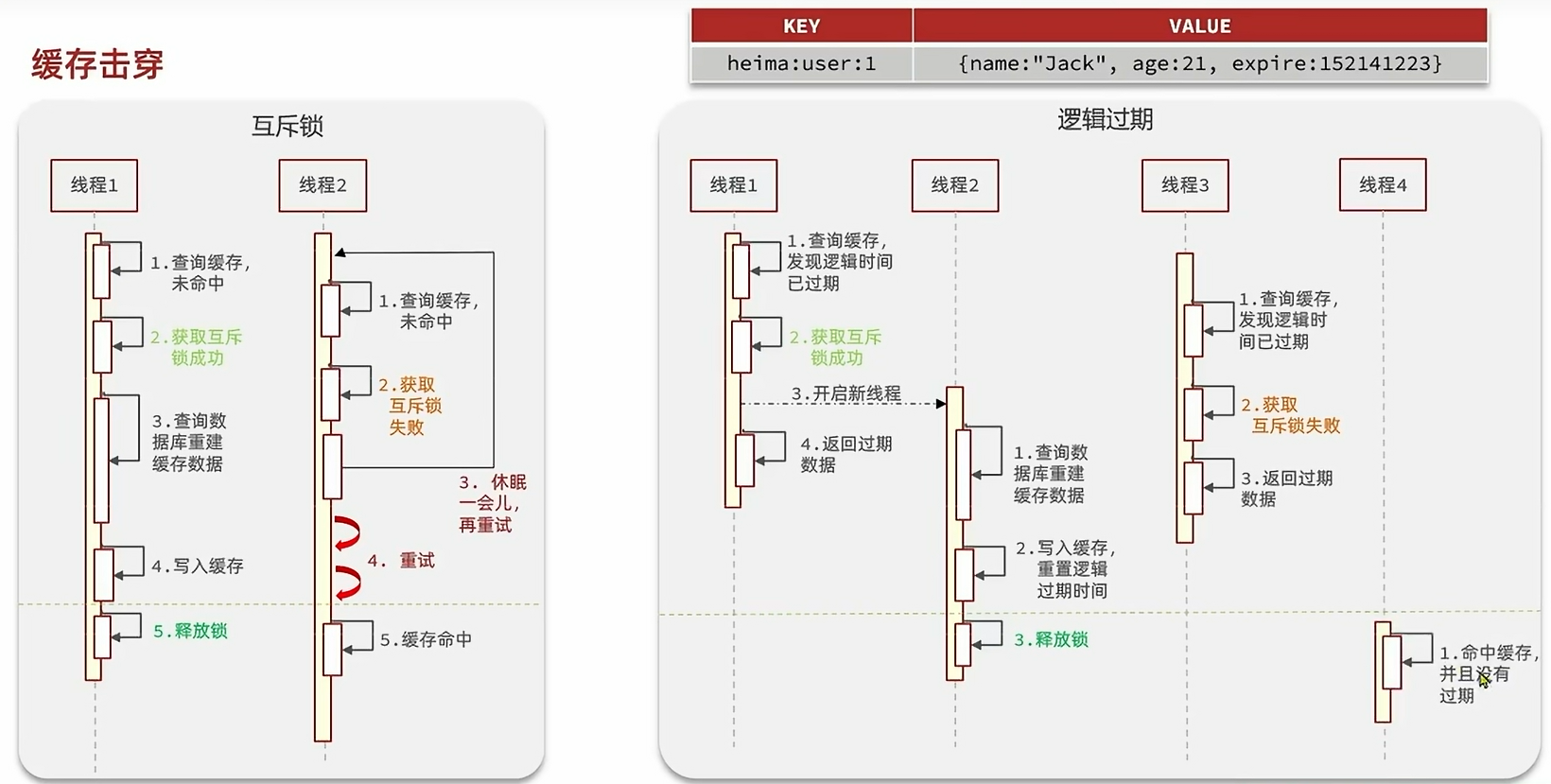
缓存穿透,缓存击穿,缓存雪崩
目录 介绍 缓存穿透 缓存击穿 缓存雪崩 原因 影响 解决方案 缓存穿透 防止缓存穿透->空值缓存案例 缓存击穿 使用互斥锁解决缓存击穿 介绍 缓存穿透 定义:缓存穿透是指用户查询数据,缓存和数据库中都不存在该数据(一般是发起恶意…...

运维 | 清理 Linux 磁盘空间方法汇总
清理 Linux 磁盘空间方法汇总 前言 系统磁盘不够用或占满了,导致部分应用或程序无法正常使用。 本章节将记录一些常用或常见的方法清理系统磁盘(持续更新中)。 常见操作 查看磁盘使用情况 cd / df -Th查找大文件和目录(根目…...

googleTest 源码主线框架性分析——TDD 01
TDD,测试驱动开发,英文全称Test-Driven Development,简称TDD,是一种不同于传统软件开发流程的新型的开发方法。它要求在编写某个功能的代码之前先编写测试代码,然后只编写使测试通过的功能代码,通过测试来推…...

Python:对常见报错导致的崩溃的处理
Python的注释: mac用cmd/即可 # 注释内容 代码正常运行会报以0退出,如果是1,则表示代码崩溃 age int(input(Age: )) print(age) 如果输入非数字,程序会崩溃,也就是破坏了程序,终止运行 解决方案…...

linux系统进程占cpu 100%解决步骤
1.查找进程 ps aux 查看指定进程: ps aux | grep process_name2.根据进程查找对应的主进程 pstree -p | grep process_name 3.查看主进程目录并删除 ps -axu | grep process_name rm -rf /usr/bin/2cbbb...

数据传输安全--IPSEC
目录 IPSEC IPSEC可以提供的安全服务 IPSEC 协议簇 两种工作模式 传输模式 隧道模式 两个通信保护协议(两个安全协议) AH(鉴别头协议) 可以提供的安全服务 报头 安全索引参数SPI 序列号 认证数据 AH保护范围 传输模…...

Unity XR Interaction Toolkit的安装(二)
提示:文章有错误的地方,还望诸位大神不吝指教! 文章目录 前言一、安装1.打开unity项目2.打开包管理器(PackageManage)3.导入Input System依赖包4.Interaction Layers unity设置总结 前言 安装前请注意:需要…...

什么是PCB流锡槽焊盘/C型焊盘,如何设计?-捷配笔记
在PCB进行机器组装器件时(如波峰焊),为了防止部分需要二次焊接的元器件的焊盘堵孔,就需要在PCB焊盘上面开个过锡槽,以便过波峰焊时,这些焊锡会流掉。开流锡槽就是在焊盘裸铜(敷锡)部…...

电缆故障精准定位系统
简介 电缆故障精准定位系统应用于35~500kV电压等级电缆线路故障精准定位与故障识别。基于百兆高速采样、北斗高精度授时、信号相位误差精确校准等 先进技术的应用,其定位精度小于5米,业内领先。 基于人工智能深度学习算法核心模块可自动、 快速进行故障…...

Google Chrome 浏览器在链接上点右键的快捷键
如今,越来越多的软件都懒得设个快捷键,就算设置了连个下划线也懒得加了。 谷歌浏览器右键 > 链接另存为... 和 复制链接地址 的快捷键 (如图)...

CFS调度器:从公平算法到内核实现全景解析
1. CFS调度器的设计哲学与公平性实现 Linux内核的CFS(Completely Fair Scheduler)调度器诞生于2007年,取代了之前的O(1)调度器。它的核心设计理念可以用一个简单的比喻理解:想象CPU时间是一块披萨,CFS要确保每个进程都…...

基于Ollama与Streamlit的本地大模型智能对话应用snowChat部署指南
1. 项目概述:一个基于本地大模型的智能对话应用最近在折腾本地部署的大语言模型,发现了一个挺有意思的项目,叫snowChat。这名字听起来就挺“冷”的,但功能却很“热”——它本质上是一个让你能在自己电脑上,用本地的大模…...


ESP32-S3 UF2 Bootloader修复指南:从原理到实战救砖
1. 项目概述:为什么ESP32-S3需要UF2 Bootloader?如果你玩过树莓派Pico或者一些Adafruit的开发板,可能会对那个插上USB后出现的U盘盘符有印象——直接把一个.uf2文件拖进去,固件就更新好了,简单得不像在搞嵌入式开发。这…...
M.2 SSD系统迁移实战:从克隆到无缝启动)
【玩转Jetson TX2 NX】(四)M.2 SSD系统迁移实战:从克隆到无缝启动
1. 为什么需要将系统迁移到M.2 SSD? Jetson TX2 NX作为一款嵌入式AI计算设备,默认搭载的eMMC存储空间往往捉襟见肘。我在实际项目中发现,16GB的eMMC在安装完JetPack系统后,剩余空间连一个中等规模的深度学习模型都放不下。更不用…...
)
告别纯视觉追踪:手把手教你用Refer-KITTI数据集复现RMOT实验(含环境配置避坑指南)
告别纯视觉追踪:手把手教你用Refer-KITTI数据集复现RMOT实验(含环境配置避坑指南) 在计算机视觉领域,多目标跟踪(Multi-Object Tracking, MOT)一直是研究热点,而近年来结合语言特征的Referring Multi-Object Tracking(…...

【NotebookLM图书馆学研究实战指南】:20年图情专家亲授AI时代知识管理新范式
更多请点击: https://codechina.net 第一章:NotebookLM图书馆学研究的范式革命 传统图书馆学研究长期依赖人工文献综述、卡片目录索引与线性知识组织方式,而NotebookLM的引入正从根本上重构知识发现、关联与推理的底层逻辑。作为Google推出的…...

Windows Cleaner:拯救C盘爆红的终极免费解决方案
Windows Cleaner:拯救C盘爆红的终极免费解决方案 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 当你的电脑屏幕突然弹出"C盘空间不足"的红…...

NotebookLM去重效率翻3倍:实测验证的7步精准过滤工作流
更多请点击: https://intelliparadigm.com 第一章:NotebookLM去重效率翻3倍:实测验证的7步精准过滤工作流 NotebookLM 原生未提供批量文本去重能力,但通过组合其 API 与本地预处理策略,可构建高精度、低延迟的语义级去…...

stable-diffusion-webui怎么生成视频
我们知道stable-diffusion-webui是用来生成图片的,视频本质上就是图片的连续播放,那么stable-diffusion-webui是否就可以生成视频呢?答案是肯定的。本文介绍一种方法,使用stable-diffusion-webui来生成视频。 具体的方法是&#…...