I.MX6ULL_Linux_驱动篇(29) GPIO驱动
Linux 下的任何外设驱动,最终都是要配置相应的硬件寄存器。所以本篇的 LED 灯驱动最终也是对 I.MX6ULL 的 IO 口进行配置,与裸机实验不同的是,在 Linux 下编写驱动要符合 Linux
的驱动框架。I.MX6U-ALPHA 开发板上的 LED 连接到 I.MX6ULL 的 GPIO1_IO03 这个引脚上,因此本章实验的重点就是编写 Linux 下 I.MX6UL 引脚控制驱动。
内存映射
Linux 内核启动的时候会初始化 MMU,设置好内存映射,设置好以后CPU访问的都是虚拟地址。 比如I.MX6ULL的GPIO1_IO03引脚的复用寄存器IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 的地址为 0X020E0068。如果没有开启 MMU 的话直接向 0X020E0068 这个寄存器地址写入数据就可以配置 GPIO1_IO03 的复用功能。现在开启了 MMU,并且设置了内存映射,因此就不能直接向 0X020E0068 这个地址写入数据了。我们必须得到 0X020E0068 这个物理地址在 Linux 系统里面对应的虚拟地址,这里就涉及到了物理内存和虚拟内存之间的转换,需要用到两个函数: ioremap 和 iounmap。
ioremap 函数
ioremap函数用于获取指定物理地址空间对应的虚拟地址空间, 定义在arch/arm/include/asm/io.h 文件中,定义如下:
1 #define ioremap(cookie,size) __arm_ioremap((cookie), (size), MT_DEVICE)
2
3 void __iomem * __arm_ioremap(phys_addr_t phys_addr, size_t size, unsigned int mtype)
4 {
5 return arch_ioremap_caller(phys_addr, size, mtype, __builtin_return_address(0));
6 }ioremap 是个宏,有两个参数: cookie 和 size,真正起作用的是函数__arm_ioremap,此函数有三个参数和一个返回值,这些参数和返回值的含义如下:
phys_addr:要映射给的物理起始地址。
size:要映射的内存空间大小。
mtype: ioremap 的类型,可以选择 MT_DEVICE、 MT_DEVICE_NONSHARED、
MT_DEVICE_CACHED 和 MT_DEVICE_WC, ioremap 函数选择 MT_DEVICE。
返回值: __iomem 类型的指针,指向映射后的虚拟空间首地址。
假如我们要获取 I.MX6ULL 的 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 寄存器对应的虚拟地址,使用如下代码即可:
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068)
static void __iomem* SW_MUX_GPIO1_IO03;
SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);宏 SW_MUX_GPIO1_IO03_BASE 是寄存器物理地址, SW_MUX_GPIO1_IO03 是映射后的虚拟地址。对于 I.MX6ULL 来说一个寄存器是 4 字节(32 位)的,因此映射的内存长度为 4。映射完成以后直接对 SW_MUX_GPIO1_IO03 进行读写操作即可。
iounmap 函数
卸载驱动的时候需要使用 iounmap 函数释放掉 ioremap 函数所做的映射, iounmap 函数原型如下:
void iounmap (volatile void __iomem *addr)iounmap 只有一个参数 addr,此参数就是要取消映射的虚拟地址空间首地址。假如我们现在要取消掉 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 寄存器的地址映射,使用如下代码即可:
iounmap(SW_MUX_GPIO1_IO03);I/O 内存访问函数
这里说的 I/O 是输入/输出的意思,并不是我们学习单片机的时候讲的 GPIO 引脚。这里涉及到两个概念: I/O 端口和 I/O 内存。当外部寄存器或内存映射到 IO 空间时,称为 I/O 端口。当外部寄存器或内存映射到内存空间时,称为 I/O 内存。但是对于 ARM 来说没有 I/O 空间这个概念,因此 ARM 体系下只有 I/O 内存(可以直接理解为内存)。使用 ioremap 函数将寄存器的物理地址映射到虚拟地址以后,我们就可以直接通过指针访问这些地址,但是 Linux 内核不建议这么做,而是推荐使用一组操作函数来对映射后的内存进行读写操作。
读操作函数:
u8 readb(const volatile void __iomem *addr)
u16 readw(const volatile void __iomem *addr)
u32 readl(const volatile void __iomem *addr)readb、 readw 和 readl 这三个函数分别对应 8bit、 16bit 和 32bit 读操作,参数 addr 就是要读取写内存地址,返回值就是读取到的数据。
写操作函数:
void writeb(u8 value, volatile void __iomem *addr)
void writew(u16 value, volatile void __iomem *addr)
void writel(u32 value, volatile void __iomem *addr)writeb、 writew 和 writel 这三个函数分别对应 8bit、 16bit 和 32bit 写操作,参数 value 是要写入的数值, addr 是要写入的地址。
GPIO驱动程序编写
新建工程文件夹,然后创建 VSCode 或SourceInsight工程。新建 gpio.c 文件,此文件就是 led 的驱动文件,在文件里面输入如下内容:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define LED_MAJOR 200 /* 主设备号 */
#define LED_NAME "led" /* 设备名字 */#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* 寄存器物理地址 */
#define CCM_CCGR1_BASE (0X020C406C)
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068)
#define SW_PAD_GPIO1_IO03_BASE (0X020E02F4)
#define GPIO1_DR_BASE (0X0209C000)
#define GPIO1_GDIR_BASE (0X0209C004)/* 映射后的寄存器虚拟地址指针 */
static void __iomem *IMX6U_CCM_CCGR1;
static void __iomem *SW_MUX_GPIO1_IO03;
static void __iomem *SW_PAD_GPIO1_IO03;
static void __iomem *GPIO1_DR;
static void __iomem *GPIO1_GDIR;/** @description : LED打开/关闭* @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED* @return : 无*/
void led_switch(u8 sta)
{u32 val = 0;if(sta == LEDON) {val = readl(GPIO1_DR);val &= ~(1 << 3); writel(val, GPIO1_DR);}else if(sta == LEDOFF) {val = readl(GPIO1_DR);val|= (1 << 3); writel(val, GPIO1_DR);}
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { led_switch(LEDON); /* 打开LED灯 */} else if(ledstat == LEDOFF) {led_switch(LEDOFF); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{return 0;
}/* 设备操作函数 */
static struct file_operations led_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{int retvalue = 0;u32 val = 0;/* 初始化LED *//* 1、寄存器地址映射 */IMX6U_CCM_CCGR1 = ioremap(CCM_CCGR1_BASE, 4);SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);SW_PAD_GPIO1_IO03 = ioremap(SW_PAD_GPIO1_IO03_BASE, 4);GPIO1_DR = ioremap(GPIO1_DR_BASE, 4);GPIO1_GDIR = ioremap(GPIO1_GDIR_BASE, 4);/* 2、使能GPIO1时钟 */val = readl(IMX6U_CCM_CCGR1);val &= ~(3 << 26); /* 清楚以前的设置 */val |= (3 << 26); /* 设置新值 */writel(val, IMX6U_CCM_CCGR1);/* 3、设置GPIO1_IO03的复用功能,将其复用为* GPIO1_IO03,最后设置IO属性。*/writel(5, SW_MUX_GPIO1_IO03);/*寄存器SW_PAD_GPIO1_IO03设置IO属性*bit 16:0 HYS关闭*bit [15:14]: 00 默认下拉*bit [13]: 0 kepper功能*bit [12]: 1 pull/keeper使能*bit [11]: 0 关闭开路输出*bit [7:6]: 10 速度100Mhz*bit [5:3]: 110 R0/6驱动能力*bit [0]: 0 低转换率*/writel(0x10B0, SW_PAD_GPIO1_IO03);/* 4、设置GPIO1_IO03为输出功能 */val = readl(GPIO1_GDIR);val &= ~(1 << 3); /* 清除以前的设置 */val |= (1 << 3); /* 设置为输出 */writel(val, GPIO1_GDIR);/* 5、默认关闭LED */val = readl(GPIO1_DR);val |= (1 << 3); writel(val, GPIO1_DR);/* 6、注册字符设备驱动 */retvalue = register_chrdev(LED_MAJOR, LED_NAME, &led_fops);if(retvalue < 0){printk("register chrdev failed!\r\n");return -EIO;}return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 取消映射 */iounmap(IMX6U_CCM_CCGR1);iounmap(SW_MUX_GPIO1_IO03);iounmap(SW_PAD_GPIO1_IO03);iounmap(GPIO1_DR);iounmap(GPIO1_GDIR);/* 注销字符设备驱动 */unregister_chrdev(LED_MAJOR, LED_NAME);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("xxx");
编写测试 APP
编写测试 APP, led 驱动加载成功以后手动创建/dev/led 节点,应用 APP 通过操作/dev/led文件来完成对 LED 设备的控制。向/dev/led 文件写 0 表示关闭 LED 灯,写 1 表示打开 LED 灯。
新建 ledApp.c 文件,在里面输入如下内容:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"#define LEDOFF 0
#define LEDON 1/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd, retvalue;char *filename;unsigned char databuf[1];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];/* 打开led驱动 */fd = open(filename, O_RDWR);if(fd < 0){printf("file %s open failed!\r\n", argv[1]);return -1;}databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 *//* 向/dev/led文件写入数据 */retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("LED Control Failed!\r\n");close(fd);return -1;}retvalue = close(fd); /* 关闭文件 */if(retvalue < 0){printf("file %s close failed!\r\n", argv[1]);return -1;}return 0;
}
运行测试
将编译出来的 led.ko和 ledApp这两个文件拷贝到 rootfs/lib/modules/4.1.15 目录中,重启开发板,进入到目录 lib/modules/4.1.15 中,输入如下命令加载 led.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe led.ko //加载驱动驱动加载成功以后创建“/dev/led”设备节点,命令如下:
mknod /dev/led c 200 0驱动节点创建成功以后就可以使用 ledApp 软件来测试驱动是否工作正常,输入如下命令打开 LED 灯:
./ledApp /dev/led 1 //打开 LED 灯输入上述命令以后观察 I.MX6U-ALPHA 开发板上的红色 LED 灯是否点亮,如果点亮的话 说明驱动工作正常。在输入如下命令关闭 LED 灯:
./ledApp /dev/led 0 //关闭 LED 灯输入上述命令以后观察 I.MX6U-ALPHA 开发板上的红色 LED 灯是否熄灭,如果熄灭的话说明我们编写的 LED 驱动工作完全正常!至此,我们成功编写了第一个真正的 Linux 驱动设备程序。如果要卸载驱动的话输入如下命令即可:
rmmod led.ko相关文章:
 GPIO驱动)
I.MX6ULL_Linux_驱动篇(29) GPIO驱动
Linux 下的任何外设驱动,最终都是要配置相应的硬件寄存器。所以本篇的 LED 灯驱动最终也是对 I.MX6ULL 的 IO 口进行配置,与裸机实验不同的是,在 Linux 下编写驱动要符合 Linux 的驱动框架。I.MX6U-ALPHA 开发板上的 LED 连接到 I.MX6ULL 的 …...
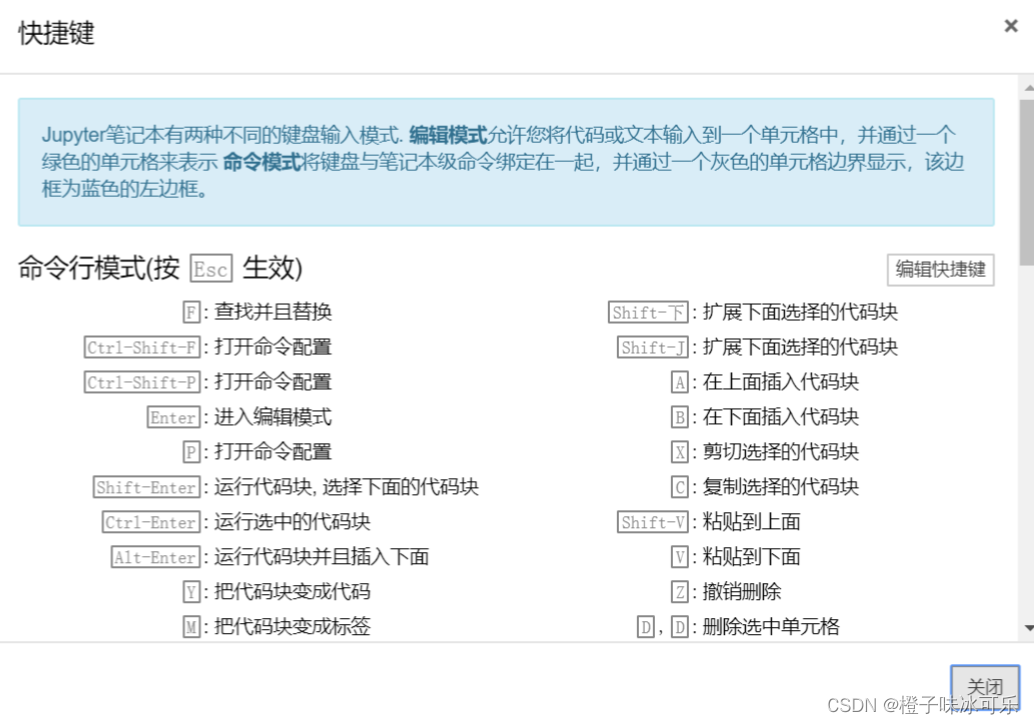
jupyter的安装和使用
目录 ❤ Jupyter Notebook是什么? notebook jupyter 简介 notebook jupyter 组成 网页应用 文档 主要特点 ❤ jupyter notebook的安装 notebook jupyter 安装有两种途径 1.通过Anaconda进行安装 2.通过pip进行安装 启动jupyter notebook ❤ jupyter …...

Springboot新手开发 Cloud篇
前言: 👏作者简介:我是笑霸final,一名热爱技术的在校学生。 📝个人主页:个人主页1 || 笑霸final的主页2 📕系列专栏:后端专栏 📧如果文章知识点有错误的地方,…...

Linux:函数指针做函数参数
#include <stdio.h> #include <stdlib.h> //创建带有函数指针做参数的函数框架api //调用者要先实现回调函数 //调用者再去调用函数框架 //所谓的回调是指 调用者去调用一个带有函数指针做参数的函数框架,函数框架反过来要调用调用者提供的回调函数 …...
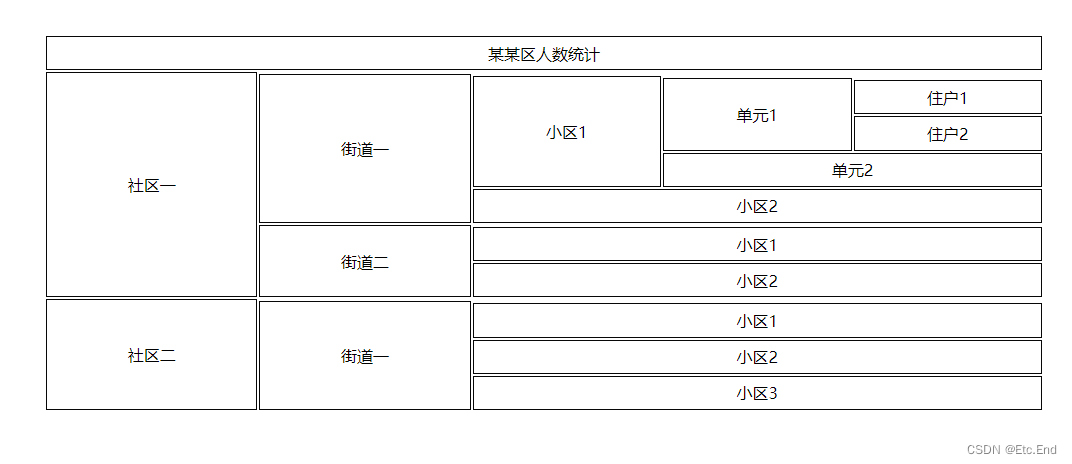
Vue3(递归组件) + 原生Table 实现树结构复杂表格
一、递归组件 什么是递归,Javascript中经常能接触到递归函数。也就是函数自己调用自己。那对于组件来说也是一样的逻辑。平时工作中见得最多应该就是菜单组件,大部分系统里面的都是递归组件。文章中我做了按需引入的配置,所以看不到我引用组…...
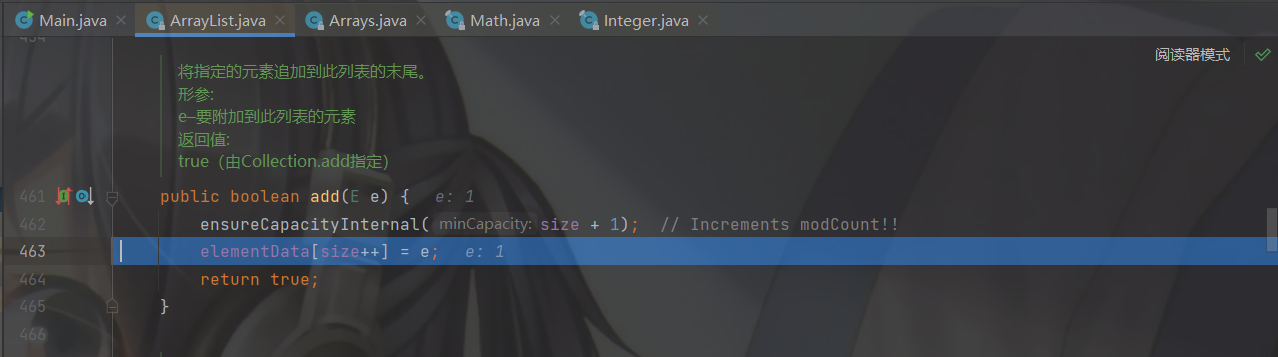
ArrayList底层源码解析
Java源码系列:下方连接 http://t.csdn.cn/Nwzed 文章目录前言一、**ArrayList底层结构和源码分析**无参构造调用创建ArrayList集合无参构造总结:发文3个工作日后 up 会把总结放入前言部分,但也诚邀读者总结,可放入评论区有参构造…...
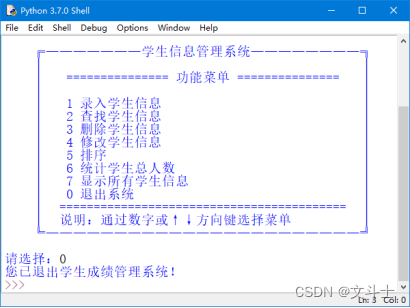
python:DIY字符画的程序使用说明.doc
目录开发环境要求运行方法具体的操作步骤如下:代码示例源码及运行程序下载地址开发环境要求 本系统的软件开发及运行环境具体如下。 操作系统:Windows 7、Windows 10。 Python版本:Python 3.7.0。 开发工具:Python IDLE。 …...
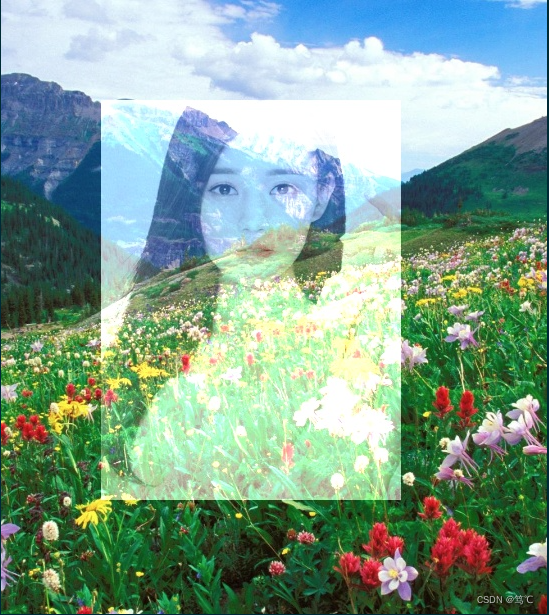
【Python/Opencv】图像权重加法函数:cv2.addWeighted()详解
【Python/Opencv】图像权重加法函数:cv2.addWeighted()详解 文章目录【Python/Opencv】图像权重加法函数:cv2.addWeighted()详解1. 介绍2. API3. 代码示例与效果3.1 代码3.2 效果4. 参考1. 介绍 在OpenCV图像加法cv2.add函数详解详细介绍了图像的加法运…...

容器的老祖宗LXC和Docker的关系
一、什么是LXC? LXC(Linux Container的缩写)是一个基于Linux内核的容器虚拟化技术,它提供了一种轻量级、快速、简便的方式来创建和管理系统容器。与传统虚拟化技术不同,LXC并不会模拟硬件,而是利用Linux内…...
)
Webpack迁移Rspack速攻实战教程(前瞻版)
前言 rspack 即将开源,但社区中不乏有已经落地的 case ,比如 rspack-migration-showcase 、 modern.js 等。 基于此,本文将介绍如何迁移一个近似于 CRA( create-react-app ) 的项目到 rspack 。 在阅读本文前&#…...
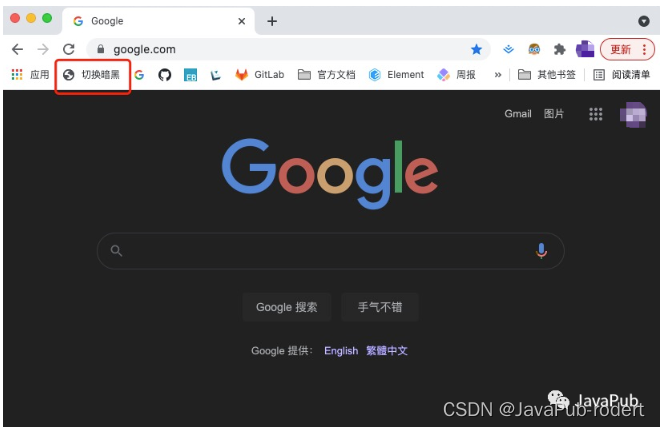
一行代码“黑”掉任意网站
文章目录只需一行代码,轻轻一点就可以把任意网站变成暗黑模式。 首先我们先做一个实验,在任意网站中,打开浏览器开发者工具(F12),在 C1onsole 控制台输入如下代码并回车: document.documentElement.style.filterinve…...
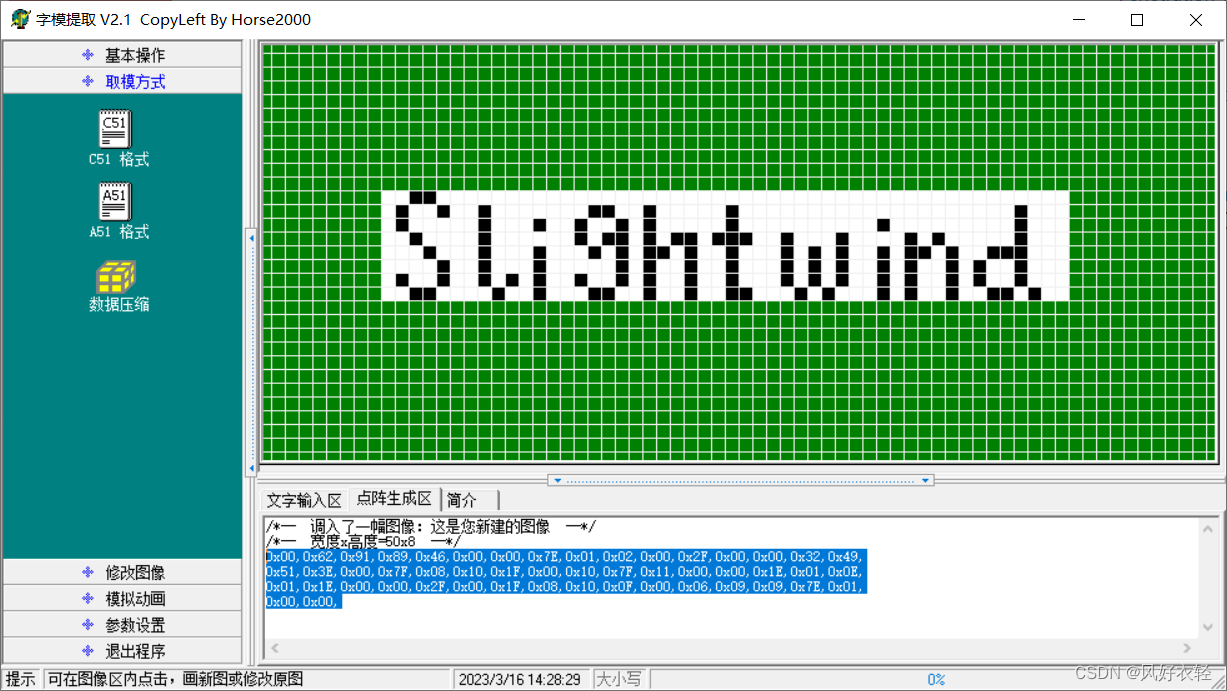
51单片机入门 -驱动 8x8 LED 点阵屏
硬件型号、软件版本、以及烧录流程 操作系统:Windows 10 x84-64单片机:STC89C52RC编译器:SDCC烧录软件:stcgal 1.6开发板:普中51单片机开发板A2套件(2022) 在 VS Code 中新建项目到烧录的过程…...

Xinlinx zynq7045国产替代 FMQL45T900全国产化 ARM 核心板+扩展板
TES745D 是一款基于 FMQL45T900 的全国产化 ARM 核心板。该核心板将 FMQL45T900(与XC7Z045-2FFG900I 兼容)的最小系统集成在了一个 87*117mm 的核心板上,可以作为一个核心模块,进行功能性扩展,能够快速的搭建起一个信号…...
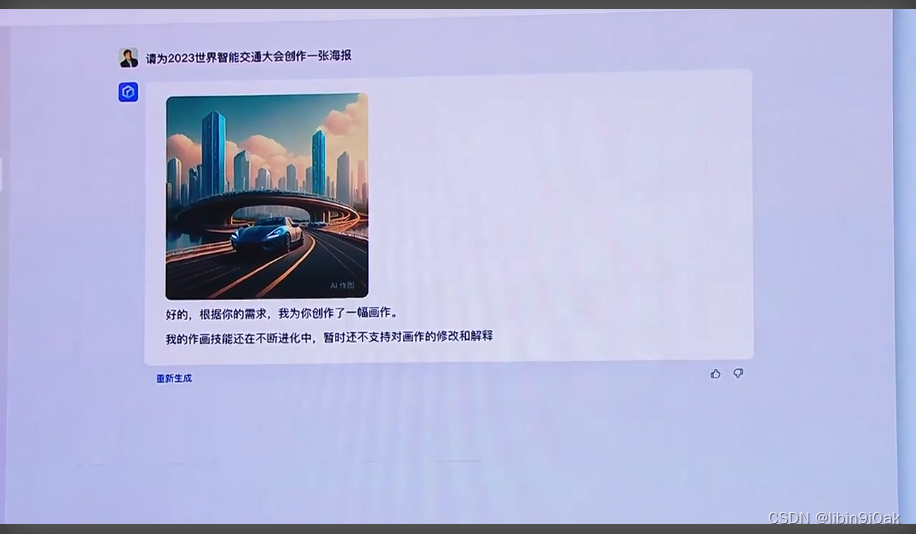
硬刚ChatGPT!文心一言能否为百度止颓?中国版ChatGPT“狂飙”的机会在哪儿?
文章目录目录产品背景发展历程科技简介主要功能合作伙伴结语文心一言 (英文名:ERNIE Bot) *是百度基于文心大模型技术推出的生成式对话产品,被外界誉为“中国版ChatGPT”,将于2023年3月份面向公众开放。 [40] 百度在人…...
Python 异步: 在非阻塞子进程中运行命令(19)
动动发财的小手,点个赞吧! 我们可以从 asyncio 执行命令。该命令将在我们可以使用非阻塞 I/O 写入和读取的子进程中运行。 1. 什么是 asyncio.subprocess.Process asyncio.subprocess.Process 类提供了由 asyncio 运行的子进程的表示。它在 asyncio 程序…...
蓝桥杯嵌入式第五课--输入捕获
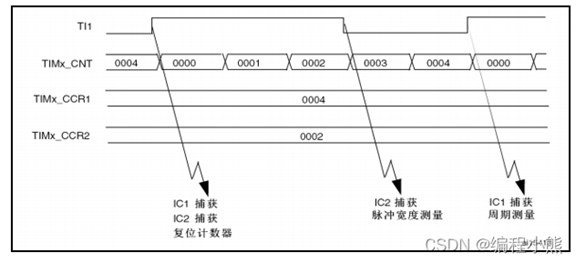
前言输入捕获的考题十分明确,就是测量输入脉冲波形的占空比和频率,对我们的板子而言,就是检测板载的两个信号发生器产生的信号:具体来说就是使用PA15和PB4来做输入捕获。输入捕获原理简介输入捕获能够对输入信号的上升沿和下降沿进…...
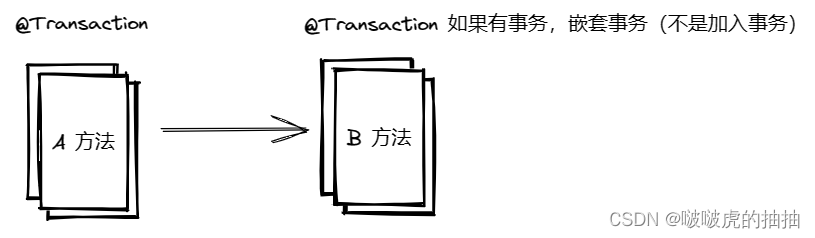
Spring事务和事务传播机制
目录 Spring中事务的实现 1、通过代码的方式手动实现事务 2、通过注解的方式实现声明式事务 2.1、Transactional作用范围 2.2、Transactional参数说明 2.3、注意事项 2.4、Transactional工作原理 事务隔离级别 1、事务特性 2、Spring中设置事务隔离级别 2.1、MySQL事…...
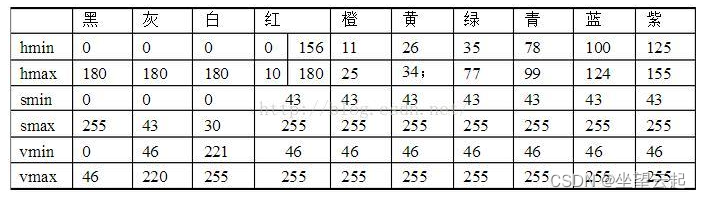
基于OpenCV+CUDA实时视频抠绿、背景合成以及抠绿算法小结
一、关于抠绿 百度百科上描述抠绿“抠绿是指在摄影或摄像时,以绿色为背景进行拍摄,在后期制作时使用特技机的“色键”将绿色背景抠去,改换其他更理想的背景的技术。”绿幕的使用已经非常普遍,大到好莱坞大片,小到自媒体的节目,一些商业娱乐场景,几乎都用使用。但是很多非…...
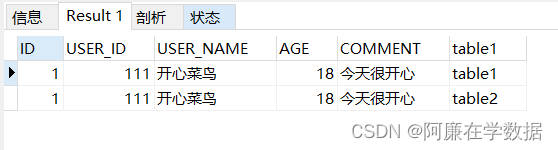
MySQL 中的 UNION 语句
文章目录一、数据准备一、UNION 和 UNION ALL二、UNION 的执行顺序(UNION 和其他语句一同出现)三、MySQL 使用 UNION(ALL) ORDER 导致排序失效四、UNION 报错语法一、数据准备 -- 创建表 CREATE TABLE test_user (ID int(11) NO…...
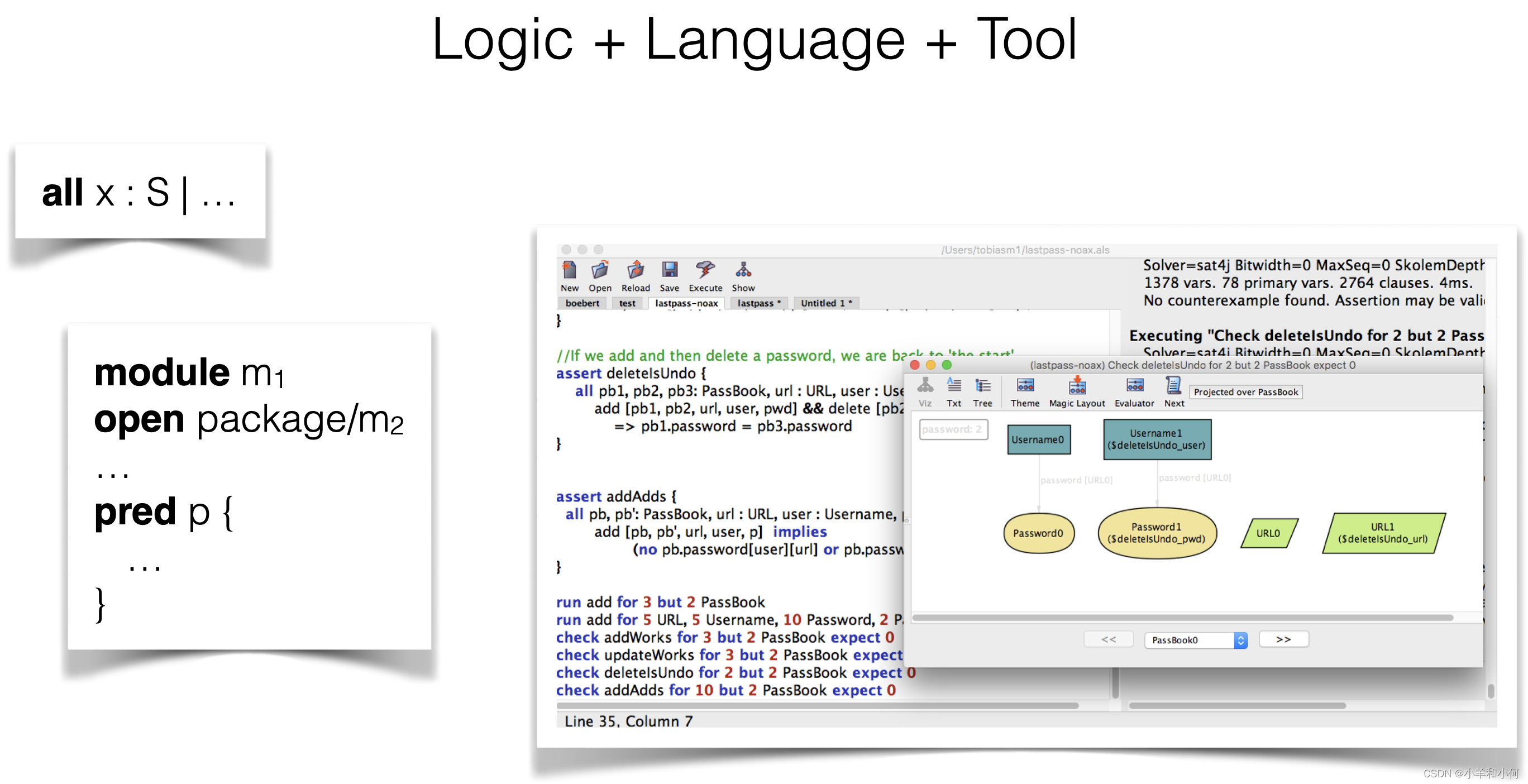
高完整性系统工程(三): Logic Intro Formal Specification
目录 1. Propositions 命题 2.1 Propositional Connectives 命题连接词 2.2 Variables 变量 2.3 Sets 2.3.1 Set Operations 2.4 Predicates 2.5 Quantification 量化 2.6 Relations 2.6.1 What Is A Relation? 2.6.2 Relations as Sets 2.6.3 Binary Relations as…...

【无人机路径规划】基于K-means 聚类和遗传算法实现多架无人机任务区域进行划分,并优化各区域内的访问路径附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...

【CTF】【Misc 文件类型】工具与流程
工具准备 本人为方便 CTF 部分 Misc 类型的解题,制作如下集成软件。本软件集成常用功能,能一站式解决大多数 Misc 文件类问题,省去切换工具的繁琐流程,大大提高解题效率,且界面简洁易用。且预留了拓展接口,…...

智能代理模式在渗透测试中的应用:pentestagent架构解析与实战
1. 项目概述与核心价值最近在安全测试和红队演练的圈子里,一个名为GH05TCREW/pentestagent的项目开始被频繁提及。乍一看这个名字,你可能会觉得它又是一个普通的渗透测试工具集,但当你真正深入去研究和使用它时,会发现它的设计理念…...

DIY改造:为Hakko FX-901烙铁打造USB-C充电电池包
1. 项目概述:打造你的专属USB充电无线烙铁 如果你和我一样,经常需要带着烙铁跑现场——无论是调试RC模型、在Maker Faire上修复作品,还是在户外临时搭建一个电子装置——那你一定对传统无线烙铁的痛点深有体会。四节AA电池,用不了…...

循迹小车传感器布局与状态机编程避坑指南:从5路红外到精准过直角弯
循迹小车传感器布局与状态机编程避坑指南:从5路红外到精准过直角弯 在智能小车开发领域,循迹功能是最基础也最具挑战性的环节之一。许多创客和学生在完成硬件搭建后,往往会陷入软件调试的泥潭——小车要么频繁偏离轨道,要么在直角…...

Warcraft Helper完整指南:3步解决魔兽争霸3在Win10/Win11的兼容性问题
Warcraft Helper完整指南:3步解决魔兽争霸3在Win10/Win11的兼容性问题 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在W…...

Arduino Audio Tools终极指南:从音频新手到专业开发者的完整解决方案
Arduino Audio Tools终极指南:从音频新手到专业开发者的完整解决方案 【免费下载链接】arduino-audio-tools Arduino Audio Tools (a powerful Audio library not only for Arduino) 项目地址: https://gitcode.com/gh_mirrors/ar/arduino-audio-tools 在嵌入…...

Cursor AI插件深度解析:从自动化脚本到智能编程工作流
1. 项目概述:一个为 Cursor 编辑器注入灵魂的 AI 增强插件如果你和我一样,日常开发重度依赖 Cursor 这款“AI 原生”编辑器,那你一定体验过它内置的 AI 对话和代码生成带来的效率提升。但用久了,你可能会发现一些痒点:…...

Harness层加密传输:Agent通信安全
Harness层加密传输:Agent通信安全 标题选项 《CI/CD管道的“隐形长城”:深入Harness Agent通信全链路加密传输机制》《从握手到数据:拆解Harness云原生平台Agent-Manager层加密传输的核心原理与实践》《DevOps安全必知:Harness如…...

CVAT 实战指南:从界面布局到高效标注全解析
1. CVAT初识:为什么选择这个标注工具? 第一次接触CVAT时,我正为一个自动驾驶项目寻找合适的标注工具。试过市面上七八款工具后,CVAT的开源免费特性立刻吸引了我——这对预算有限的小团队简直是救命稻草。更惊喜的是,它…...