源/目的检查开启导致虚拟IP背后的LVS无法正常访问
情况描述
近期发现48网段主机无法访问8.83这个VIP(虚拟IP),环境是 8.83 绑定了两个LVS实例,然后LVS实例转发到后端的nginx 静态资源;整个流程是,客户端发起对VIP的请求,LVS将请求转发到后端实例,后端实例直接返回给客户端。
处理步骤
1、同网段端口不通,考虑是否有主机层面防火墙,检查是没有的
2、nmap扫描VIP的端口,发现22、111正常,80/443拦截,考虑是否安全组限制,检查发现并没有限制
Starting Nmap 6.40 ( http://nmap.org ) at 2024-04-26 10:09 CST
Nmap scan report for 1.1.8.83
Host is up (0.00018s latency).
Not shown: 996 closed ports
PORT STATE SERVICE
22/tcp open ssh
80/tcp filtered http
111/tcp open rpcbind
443/tcp filtered https
MAC Address: XX:XX:XX:XX:XX:XX (Unknown)3、考虑后端端口是否正常,尝试客户端直接访问后端端口,发现正常可访问
此时,直接访问VIP端口,也能访问了,这个就暂时无法理解(过了一阵子又发生了这个情况)
4、抓包(对比没有访问过后端实例的请求与被拦截的请求),因为已经可以访问了,看不出来
5、突然想起来,云网卡上有个源目的检测,发现后端服务器云网卡有开启这个开关,关闭后不再拦截
总结
这个情况属实是没想到,默认开启的开关一时半会也没关联到这方面,凑巧解决的,应该是过了LVS,后端云网卡认为源端应该是LVS而不是客户机,然后发送报文被拦截了,也可能是其他原因
看来问题不光出现在视野范围内啊;
补充说明
以下内容是摘抄云网卡上对源目的检测的说明:
为安全起见,默认情况下“源/目的检查”的状态为“ON”,系统会检查弹性云服务器发送的报文中源IP地址是否正确,如果不正确,则不允许发送该报文。通过该功能,有助于防止伪装报文攻击,提升安全性。
以下两种场景,您需要通过设置“源/目的检查”状态为“OFF”,禁用该功能,以保证报文正常转发:
1. 在SNAT场景下,配置SNAT的弹性云服务器起转发作用,这种保护机制会导致报文的发送者无法接收到返回的报文。
2. 在虚拟IP场景下,绑定虚拟IP的弹性云服务器,绑定的网卡需要发送源IP为虚拟IP的报文。
相关文章:

源/目的检查开启导致虚拟IP背后的LVS无法正常访问
情况描述 近期发现48网段主机无法访问8.83这个VIP(虚拟IP),环境是 8.83 绑定了两个LVS实例,然后LVS实例转发到后端的nginx 静态资源;整个流程是,客户端发起对VIP的请求,LVS将请求转发到后端实例…...

类和对象(四)
构造函数中的初始化列表 之前在实现构造函数时,主要是在函数体内进行赋值,而构造函数还有另一种初始化方式,通过初始化列表进行初始化。 初始化列表的使⽤⽅式是以⼀个冒号开始,接着是⼀个以逗号分隔的数据成员列表,…...

<PLC><HMI><汇川>在汇川HMI画面中,如何为UI设置全局样式?
前言 汇川的HMI软件是使用了Qt来编写的,因此在汇川的HMI程序编写过程,是支持使用qt的样式来自定义部件样式的,即qss格式。 概述 汇川的软件本身提供三个系统的style样式,我们可以直接使用,但是,如果系统提供的样式不符合你的需求,那么你可以对其进行修改,或者自己新建…...

在Git项目中添加并应用“.gitignore”文件
在Git项目中添加并应用.gitignore文件 创建或修改.gitignore文件: 在项目的根目录下创建一个名为.gitignore的文件。如果已经有此文件,可以直接修改。 在文件中添加您希望Git忽略的文件和目录。例如: # 忽略所有的log文件 *.log# 忽略所有的…...
LeetCode Hot100 搜索二维矩阵
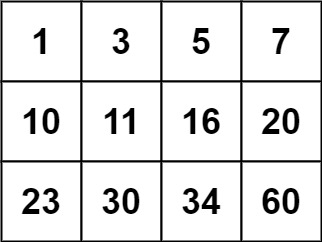
给你一个满足下述两条属性的 m x n 整数矩阵: 每行中的整数从左到右按非严格递增顺序排列。每行的第一个整数大于前一行的最后一个整数。 给你一个整数 target ,如果 target 在矩阵中,返回 true ;否则,返回 false 。…...
详解)
iOS中的KVO(Key-Value Observing)详解
iOS中的KVO(Key-Value Observing)详解 一、KVO概述 KVO(Key-Value Observing),即键值观察/监听,是苹果提供的一套事件通知机制。它允许一个对象(观察者)观察/监听另一个对象&#…...
算法 —— 暴力枚举
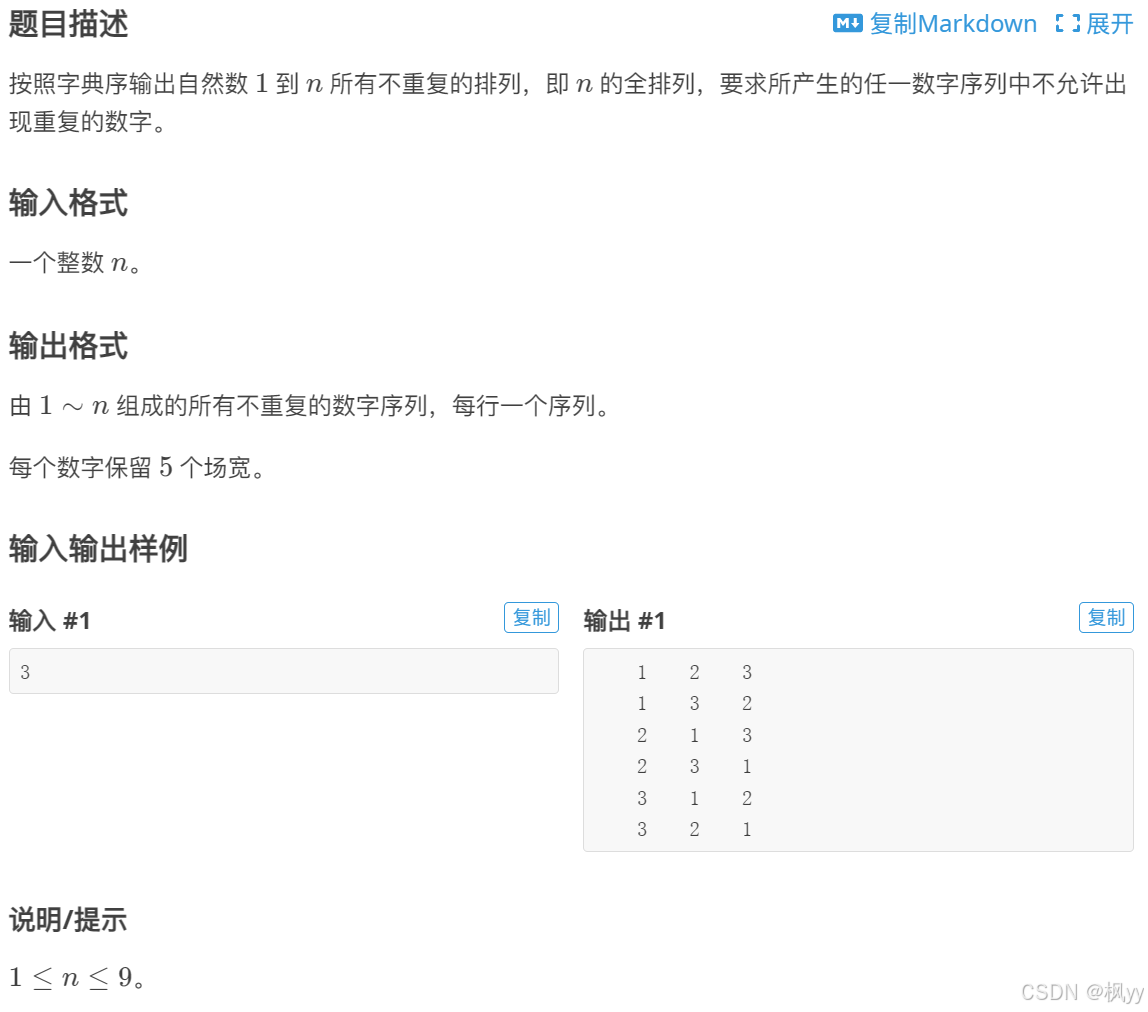
目录 循环枚举 P2241 统计方形(数据加强版) P2089 烤鸡 P1618 三连击(升级版) 子集枚举 P1036 [NOIP2002 普及组] 选数 P1157 组合的输出 排列枚举 P1706 全排列问题 P1088 [NOIP2004 普及组] 火星人 循环枚举 顾名思…...

构造+有序集合,CF 1023D - Array Restoration
一、题目 1、题目描述 2、输入输出 2.1输入 2.2输出 3、原题链接 1023D - Array Restoration 二、解题报告 1、思路分析 先考虑合法性检查: 对于数字x,其最左位置和最右位置 之间如果存在数字比x小,则非法 由于q次操作,第q…...

Scrapy 爬取旅游景点相关数据(四)
本节内容主要为: (1)创建数据库 (2)创建数据库表 (3)爬取数据进MYSQL库 1 新建数据库 使用MYSQL数据库存储数据,创建一个新的数据库 create database scrapy_demo;2 新建数据表 CR…...

Vue常用指令及其生命周期
作者:CSDN-PleaSure乐事 欢迎大家阅读我的博客 希望大家喜欢 目录 1.常用指令 1.1 v-bind 1.2 v-model 注意事项 1.3 v-on 注意事项 1.4 v-if / v-else-if / v-else 1.5 v-show 1.6 v-for 无索引 有索引 生命周期 定义 流程 1.常用指令 Vue当中的指令…...

简化数据流:Apache SeaTunnel实现多表同步的高效指南
Apache SeaTunnel除了单表之间的数据同步之外,也支持单表同步到多表,多表同步到单表,以及多表同步到多表,下面简单举例说明如何实现这些功能。 单表 to 单表 一个source,一个sink。 从mysql同步到mysql,…...
均匀圆形阵列原理及MATLAB仿真
均匀圆形阵列原理及MATLAB仿真 目录 前言 一、均匀圆阵原理 二、圆心不存在阵元方向图仿真 三、圆心存在阵元方向图仿真 四、MATLAB仿真代码 总结 前言 本文详细推导了均匀圆形阵列的方向图函数,对圆心不放置阵元和圆心放置阵元的均匀圆形阵列方向图都进行了仿…...

vue2使用univerjs
1、univerjs Univer 提供了一个全面的企业级文档与数据协同的解决方案,支持电子表格、文本文档和演示幻灯片三大核心文档类型。通过灵活的 API 和插件机制,开发者可以在 Univer 的基础上进行个性化功能的定制和扩展,以适应不同用户在不同场景…...

VUE3 el-table-column header新增必填*
1.在需要加必填星号的el-table-column上添加render-header属性 <el-table-column :label"getName(产品代码)" :render-header"addRedStart" prop"MODELCODE" min-width“4.5%”> <template v-slot"scope"> <el-input …...

条件概率和贝叶斯公式
...

Kali中docker与docker-compose的配置
权限升级 sudo su 升级为root用户 更新软件 apt-get update安装HTTPS协议和CA证书 apt-get install -y apt-transport-https ca-certificates下载docker apt下载docker apt install docker.io 验证docker安装是否成功 查版本 docker -v 启动docker systemctl start …...

C++ | Leetcode C++题解之第283题移动零
题目: 题解: class Solution { public:void moveZeroes(vector<int>& nums) {int n nums.size(), left 0, right 0;while (right < n) {if (nums[right]) {swap(nums[left], nums[right]);left;}right;}} };...

Exponential Moving Average (EMA) in Stable Diffusion
1.Moving Average in Stable Diffusion (SMA&EMA) 1.Moving average 2.移动平均值 3.How We Trained Stable Diffusion for Less than $50k (Part 3) Moving Average 在统计学中,移动平均是通过创建整个数据集中不同选择的一系列平均值来分析数据点的计算。 …...

017、Vue动态tag标签
文章目录 1、先看效果2、代码 1、先看效果 2、代码 <template><div class "tags"><el-tag size"medium"closable v-for"item,index in tags":key"item.path":effect"item.title$route.name?dark:plain"cl…...

RocketMQ 架构概览
Apache RocketMQ 是一个分布式消息中间件和流计算平台,提供低延迟、高性能和可靠的队列服务,并且支持大规模的分布式系统。在详细介绍 RocketMQ 的整体架构之前,先了解其设计目标和核心特性是很重要的。RocketMQ 主要用于处理大规模的消息&am…...

如何快速解锁NCM加密音乐:NcmppGui完整使用指南
如何快速解锁NCM加密音乐:NcmppGui完整使用指南 【免费下载链接】ncmppGui 一个使用C编写的极速ncm转换GUI工具 项目地址: https://gitcode.com/gh_mirrors/nc/ncmppGui 你是否曾经下载了喜欢的音乐,却因为NCM格式的限制而无法在其他设备上播放&a…...

微信网页版访问技术突破:基于请求伪装的多浏览器兼容解决方案
微信网页版访问技术突破:基于请求伪装的多浏览器兼容解决方案 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 微信网页版访问限制一直是开…...

Vue 3 Composition API驱动下的企业级日期时间选择器架构演进与实践
Vue 3 Composition API驱动下的企业级日期时间选择器架构演进与实践 【免费下载链接】vue3-date-time-picker Datepicker component for Vue 3 项目地址: https://gitcode.com/gh_mirrors/vu/vue3-date-time-picker 在现代化Web应用开发中,日期时间选择器作为…...

微信AI助手实战:基于大模型的智能消息处理机器人搭建指南
1. 项目概述与核心价值 最近在折腾一个挺有意思的开源项目,叫 Wechat-AI-Assistant。简单来说,它就是一个能帮你自动处理微信消息的“智能小秘书”。想象一下,你正在开会,或者忙得脚不沾地,微信上却不断弹出各种消息&a…...

开源AI对话界面chat-ui:快速部署与定制化LLM前端实践
1. 项目概述:一个开源的AI对话界面如果你最近在折腾大语言模型(LLM),不管是想部署一个私有的ChatGPT替代品,还是想给自己训练或微调的模型配一个像样的“脸面”,那你大概率绕不开一个核心问题:前…...

Adobe-GenP 3.0:解锁Adobe全家桶功能的5分钟终极指南 [特殊字符]
Adobe-GenP 3.0:解锁Adobe全家桶功能的5分钟终极指南 🚀 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP 3.0是一款强大的Adobe C…...

BNO085传感器RVC模式实战:Python驱动与姿态解算应用指南
1. 项目概述与核心价值在机器人、无人机或者任何需要感知自身在三维空间中“朝向”的项目里,姿态解算都是一个绕不开的核心技术。简单来说,它就是要回答“我的设备现在头朝哪、身子歪了多少度”这类问题。过去,我们可能用一个简单的三轴加速度…...

如何用DouyinLiveWebFetcher实现抖音直播数据自动化采集与智能分析
如何用DouyinLiveWebFetcher实现抖音直播数据自动化采集与智能分析 【免费下载链接】DouyinLiveWebFetcher 抖音直播间网页版的弹幕数据抓取(2025最新版本) 项目地址: https://gitcode.com/gh_mirrors/do/DouyinLiveWebFetcher 面对直播电商的爆发…...

2023B卷,代表团坐车
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:华为OD面试 文章目录 一、🍀前言 1.1 ☘️题目详情 1.2 ☘️参考解题答案 一、🍀前言 2023B卷,代表团坐车。 1.1 ☘️题目详情 题目: 某组织举行…...

复杂园区管控难?无感跨镜追踪打造全流程动态溯源方案
复杂园区管控难?无感跨镜追踪打造全流程动态溯源方案产业园区、科创园区、物流园区、化工园区等复杂场景,普遍存在点位分散、人员车流密集、动线繁杂、盲区死角多、安防设备数据割裂等管控难题。传统园区管理模式依赖人工巡检、单点监控查看、被动事后追…...