ROS2教程(10) - 编写接收程序、添加frame - Linux
- 注意 : 本篇文章接上节 (点击此处跳转到上节)
编写接收程序
cpp
- <the_work_ws>/src/learning_tf2_cpp/src/turtle_tf2_listener.cpp
#include <chrono>
#include <functional>
#include <memory>
#include <string>#include "geometry_msgs/msg/transform_stamped.hpp"
#include "geometry_msgs/msg/twist.hpp"
#include "rclcpp/rclcpp.hpp"
#include "tf2/exceptions.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "turtlesim/srv/spawn.hpp"using namespace std::chrono_literals;class FrameListener : public rclcpp::Node
{
public:FrameListener(): Node("turtle_tf2_frame_listener"),turtle_spawning_service_ready_(false),turtle_spawned_(false){// 声明并获取参数target_frametarget_frame_ = this->declare_parameter<std::string>("target_frame", "turtle1");tf_buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());// 这里我们创建一个对象。 一旦创建了侦听器,它就开始通过网络接收tf2转换,并将它们缓冲至多10秒。tf_listener_ = std::make_shared<tf2_ros::TransformListener>(*tf_buffer_);// 创建一个客户端 来生成乌龟spawner_ = this->create_client<turtlesim::srv::Spawn>("spawn");// 创建 turtle2 速度发布器publisher_ = this->create_publisher<geometry_msgs::msg::Twist>("turtle2/cmd_vel", 1);// 每秒调用一次定时器timer_ = this->create_wall_timer(1s, [this]() {return this->on_timer();});}private:void on_timer(){// 将frame names 储存,以便计算变换std::string fromFrameRel = target_frame_.c_str();std::string toFrameRel = "turtle2";if (turtle_spawning_service_ready_) {if (turtle_spawned_) {geometry_msgs::msg::TransformStamped t;// 查找 target_frame 和 turtle2 frames 之间的转换,并发送指令使 turtle2 到达目标范围try {// 向侦听器查询特定的转换// 参数:Target frame(目标frame)、Source frame(源frame)、The time we want to transform(想要变换的时间)t = tf_buffer_->lookupTransform(toFrameRel, fromFrameRel, tf2::TimePointZero);} catch (const tf2::TransformException & ex) {RCLCPP_INFO(this->get_logger(), "Could not transform %s to %s: %s",toFrameRel.c_str(), fromFrameRel.c_str(), ex.what());return;}geometry_msgs::msg::Twist msg;static const double scaleRotationRate = 1.0;msg.angular.z = scaleRotationRate * atan2(t.transform.translation.y,t.transform.translation.x);static const double scaleForwardSpeed = 0.5;msg.linear.x = scaleForwardSpeed * sqrt(pow(t.transform.translation.x, 2) +pow(t.transform.translation.y, 2));publisher_->publish(msg);} else {RCLCPP_INFO(this->get_logger(), "Successfully spawned");turtle_spawned_ = true;}} else {// 检查服务器是否准备就绪if (spawner_->service_is_ready()) {// 初始化// 请注意 x, y 和 在 turtlesim/srv/Spawn 中是 float 类型auto request = std::make_shared<turtlesim::srv::Spawn::Request>();request->x = 4.0;request->y = 2.0;request->theta = 0.0;request->name = "turtle2";// Call request(请求)using ServiceResponseFuture =rclcpp::Client<turtlesim::srv::Spawn>::SharedFuture;auto response_received_callback = [this](ServiceResponseFuture future) {auto result = future.get();if (strcmp(result->name.c_str(), "turtle2") == 0) {turtle_spawning_service_ready_ = true;} else {RCLCPP_ERROR(this->get_logger(), "Service callback result mismatch");}};auto result = spawner_->async_send_request(request, response_received_callback);} else {RCLCPP_INFO(this->get_logger(), "Service is not ready");}}}// 是否有生成海龟的服务的bool值bool turtle_spawning_service_ready_;// 如果生成海龟成功bool turtle_spawned_;rclcpp::Client<turtlesim::srv::Spawn>::SharedPtr spawner_{nullptr};rclcpp::TimerBase::SharedPtr timer_{nullptr};rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher_{nullptr};std::shared_ptr<tf2_ros::TransformListener> tf_listener_{nullptr};std::unique_ptr<tf2_ros::Buffer> tf_buffer_;std::string target_frame_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<FrameListener>());rclcpp::shutdown();return 0;
}
CMakeLists.txt
- <the_work_ws>/src/learning_tf2_cpp/CMakeLists.txt
# add
add_executable(turtle_tf2_listener src/turtle_tf2_listener.cpp)
ament_target_dependencies(turtle_tf2_listenergeometry_msgsrclcpptf2tf2_rosturtlesim
)
install(TARGETSturtle_tf2_listenerDESTINATION lib/${PROJECT_NAME})
launch
- <the_work_ws>/src/learning_tf2_cpp/launch/turtle_tf2_demo.launch.py
# 更新为以下内容
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfigurationfrom launch_ros.actions import Nodedef generate_launch_description():return LaunchDescription([Node(package='turtlesim',executable='turtlesim_node',name='sim'),Node(package='learning_tf2_cpp',executable='turtle_tf2_broadcaster',name='broadcaster1',parameters=[{'turtlename': 'turtle1'}]),DeclareLaunchArgument('target_frame', default_value='turtle1',description='Target frame name.'),Node(package='learning_tf2_cpp',executable='turtle_tf2_broadcaster',name='broadcaster2',parameters=[{'turtlename': 'turtle2'}]),Node(package='learning_tf2_cpp',executable='turtle_tf2_listener',name='listener',parameters=[{'target_frame': LaunchConfiguration('target_frame')}]),])
run
# 终端1
rosdep install -i --from-path src --rosdistro humble -y
colcon build --packages-select learning_tf2_cpp
. install/setup.bash
ros2 launch learning_tf2_cpp turtle_tf2_demo.launch.py # 我们看到有两只海龟# 终端2ros2 run turtlesim turtle_teleop_key # 控制海龟1运动,发现海龟2跟随运动
添加frame
在之前的教程中,我们通过编写tf2广播器和tf2侦听器来重新创建海龟演示。 本教程将教你如何向转换树添加额外的固定和动态frame。 事实上,在tf2中添加一个frame与创建tf2广播器非常相似,但是这个示例将向您展示tf2的一些附加功能。
静态frmae广播器
我们将编写固定frame广播程序,基于前面的海龟跟随示例,我们将添加一个坐标系carrot1,它是turtle1的子坐标系,并将作为第二只海龟的目标。
cpp
- <the_work_ws>/src/learning_tf2_cpp/src/fixed_frame_tf2_broadcaster.cpp
#include <chrono>
#include <functional>
#include <memory>#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
#include "tf2_ros/transform_broadcaster.h"using namespace std::chrono_literals;class FixedFrameBroadcaster : public rclcpp::Node
{
public:FixedFrameBroadcaster(): Node("fixed_frame_tf2_broadcaster"){tf_broadcaster_ = std::make_shared<tf2_ros::TransformBroadcaster>(this);timer_ = this->create_wall_timer(100ms, std::bind(&FixedFrameBroadcaster::broadcast_timer_callback, this));}private:void broadcast_timer_callback(){// 坐标系转换geometry_msgs::msg::TransformStamped t;t.header.stamp = this->get_clock()->now();t.header.frame_id = "turtle1";t.child_frame_id = "carrot1";t.transform.translation.x = 0.0;t.transform.translation.y = 2.0;t.transform.translation.z = 0.0;t.transform.rotation.x = 0.0;t.transform.rotation.y = 0.0;t.transform.rotation.z = 0.0;t.transform.rotation.w = 1.0;tf_broadcaster_->sendTransform(t);}rclcpp::TimerBase::SharedPtr timer_;std::shared_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<FixedFrameBroadcaster>());rclcpp::shutdown();return 0;
}
CMakeLists.txt
- <the_work_ws>/src/learning_tf2_cpp/CMakeLists.txt
# add
add_executable(fixed_frame_tf2_broadcaster src/fixed_frame_tf2_broadcaster.cpp)
ament_target_dependencies(fixed_frame_tf2_broadcastergeometry_msgsrclcpptf2_ros
)
install(TARGETSfixed_frame_tf2_broadcasterDESTINATION lib/${PROJECT_NAME})
launch
- <the_work_ws>/src/learning_tf2_cpp/launch/turtle_tf2_fixed_frame_demo.launch.py
import osfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSourcefrom launch_ros.actions import Nodedef generate_launch_description():demo_nodes = IncludeLaunchDescription(PythonLaunchDescriptionSource([os.path.join(get_package_share_directory('learning_tf2_cpp'), 'launch'),'/turtle_tf2_demo.launch.py']),)return LaunchDescription([demo_nodes,Node(package='learning_tf2_cpp',executable='fixed_frame_tf2_broadcaster',name='fixed_broadcaster',),])
run
# 终端1
rosdep install -i --from-path src --rosdistro humble -y
colcon build --packages-select learning_tf2_cpp
. install/setup.bash
ros2 launch learning_tf2_cpp turtle_tf2_fixed_frame_demo.launch.py
如果您驾驶第一只海龟,您应该注意到,尽管我们添加了一个新frame,但其行为与上一教程相比并没有改变。 这是因为添加一个额外的frame不会影响其他帧,我们的监听器仍然使用先前定义的frame。
因此,如果我们想让第二只乌龟跟随carrot而不是第一只乌龟,我们需要改变target_frame的值。 这可以通过两种方式实现。 一种方法是直接从控制台将参数传递给启动文件:
ros2 launch learning_tf2_cpp turtle_tf2_fixed_frame_demo.launch.py target_frame:=carrot1
第二种方法是更新启动文件turtle_tf2_fixed_frame_demo.launch.py:
def generate_launch_description():demo_nodes = IncludeLaunchDescription(...,launch_arguments={'target_frame': 'carrot1'}.items(),)
现在重新构建包,重新启动,您将看到第二只乌龟跟随carrot而不是第一只乌龟!
动态frame广播器
cpp
- <the_work_ws>/src/learning_tf2_cpp/src/dynamic_frame_tf2_broadcaster.cpp
#include <chrono>
#include <functional>
#include <memory>#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
#include "tf2_ros/transform_broadcaster.h"using namespace std::chrono_literals;const double PI = 3.141592653589793238463;class DynamicFrameBroadcaster : public rclcpp::Node
{
public:DynamicFrameBroadcaster(): Node("dynamic_frame_tf2_broadcaster"){tf_broadcaster_ = std::make_shared<tf2_ros::TransformBroadcaster>(this);timer_ = this->create_wall_timer(100ms, std::bind(&DynamicFrameBroadcaster::broadcast_timer_callback, this));}private:void broadcast_timer_callback(){rclcpp::Time now = this->get_clock()->now();double x = now.seconds() * PI;// 设置不断变换的偏移量geometry_msgs::msg::TransformStamped t;t.header.stamp = now;t.header.frame_id = "turtle1";t.child_frame_id = "carrot1";t.transform.translation.x = 10 * sin(x);t.transform.translation.y = 10 * cos(x);t.transform.translation.z = 0.0;t.transform.rotation.x = 0.0;t.transform.rotation.y = 0.0;t.transform.rotation.z = 0.0;t.transform.rotation.w = 1.0;tf_broadcaster_->sendTransform(t);}rclcpp::TimerBase::SharedPtr timer_;std::shared_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<DynamicFrameBroadcaster>());rclcpp::shutdown();return 0;
}
CMakeLists.txt
- <the_work_ws>/src/learning_tf2_cpp/CMakeLists.txt
# add
add_executable(dynamic_frame_tf2_broadcaster src/dynamic_frame_tf2_broadcaster.cpp)
ament_target_dependencies(dynamic_frame_tf2_broadcastergeometry_msgsrclcpptf2_ros
)
install(TARGETSdynamic_frame_tf2_broadcasterDESTINATION lib/${PROJECT_NAME})
launch
- <the_work_ws>/src/learning_tf2_cpp/launch/turtle_tf2_dynamic_frame_demo.launch.py
import osfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSourcefrom launch_ros.actions import Nodedef generate_launch_description():demo_nodes = IncludeLaunchDescription(PythonLaunchDescriptionSource([os.path.join(get_package_share_directory('learning_tf2_cpp'), 'launch'),'/turtle_tf2_demo.launch.py']),launch_arguments={'target_frame': 'carrot1'}.items(),)return LaunchDescription([demo_nodes,Node(package='learning_tf2_cpp',executable='dynamic_frame_tf2_broadcaster',name='dynamic_broadcaster',),])
run
rosdep install -i --from-path src --rosdistro humble -y
colcon build --packages-select learning_tf2_cpp
. install/setup.bash
ros2 launch learning_tf2_cpp turtle_tf2_dynamic_frame_demo.launch.py
相关文章:
 - 编写接收程序、添加frame - Linux)
ROS2教程(10) - 编写接收程序、添加frame - Linux
注意 : 本篇文章接上节 (点击此处跳转到上节) 编写接收程序 cpp <the_work_ws>/src/learning_tf2_cpp/src/turtle_tf2_listener.cpp #include <chrono> #include <functional> #include <memory> #include <string>#include "geometry_…...

Arraylist与LinkedList的区别
Arraylist 概念 Arraylist非线程安全Arraylist 底层使用的是Object数组ArrayList 采用数组存储,插入和删除元素的时间复杂度受元素位置的影响ArrayList 支持快速随机访问,就是通过元素的序号快速获取元素对象ArrayList的空间浪费主要体现在列表的结尾会预留一定的容…...

Nestjs使用Redis的最佳实践
前几天在项目中有用到Redis JWT实现服务端对token的主动删除(退出登录功能)。故此介绍下如何在Nestjs中使用Redis,并做下总结。 知识准备 了解Redis - 网上很多简介。了解Nestjs如何使用jwt生成token - 可移步看下我之前的文章 效果展示 一、mac安装与使用 示…...
Cadence23学习笔记(十四)
ARC就是圆弧走线的意思: 仅打开网络的话可以只针对net进行修改走线的属性: 然后现在鼠标左键点那个走线,那个走线就会变为弧形: 添加差分对: 之后,分别点击两条线即可分配差分对: 选完差分对之后…...
socket 编程
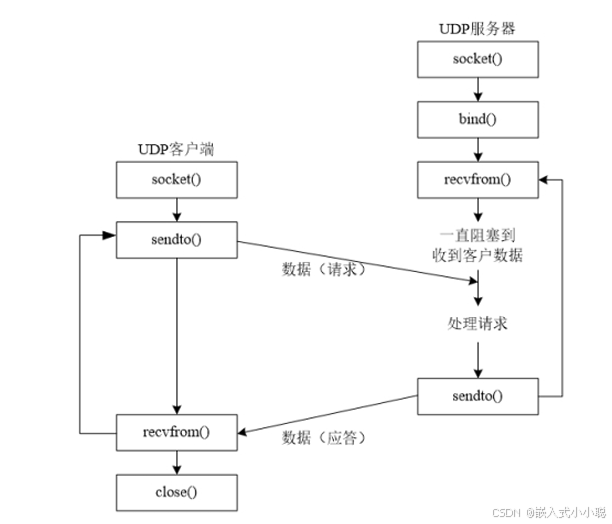
1. socket 套接字 Socket 是一个用于网络通信的技术。Socket 通信允许客户端——服务器之间进行双向通信。它可以使任何客户端机器连接到任何服务器,安装在客户端和服务器两侧的程序就可以实现双向的通信。Socket的作用就是把连接两个计算机的通信软件“中间接”起来…...

如何使用 HTTPie 进行高效的 HTTP 请求
如何使用 HTTPie 进行高效的 HTTP 请求 引言 HTTPie 是一个命令行 HTTP 客户端,它以其简洁的语法和人性化的输出格式赢得了广大开发者的喜爱。与 curl 相比,HTTPie 提供了更加直观和用户友好的接口,使得执行 HTTP 请求变得轻松愉快。本文将…...
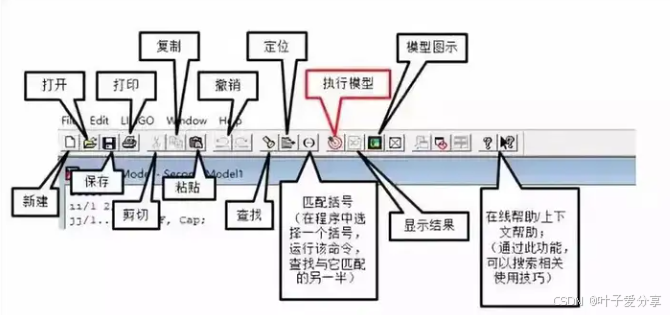
Lingo求解器百度云下载 ling 8.0/lingo 18安装包资源分享
如大家所熟悉的,Lingo是Linear Interaction and General Optimizer的缩写,中文名称为“交互式线性和通用优化求解器”,是一套专门用于求解最优化问题的软件包。 在大部分人认知里,Lingo可用于求解线性规划、二次规划、整数规划、…...
文献综述如何为研究的理论框架做出贡献
VersaBot一键生成文献综述 文献综述在几个关键方面对塑造和巩固研究的理论框架起着至关重要的作用; 1. 识别相关理论和概念: 通过对现有研究的探索,您将遇到与您的主题相关的突出理论和概念。这些可以作为您自己的理论框架的构建块。 2. 理…...
FastAPI(七十九)实战开发《在线课程学习系统》接口开发-- 加入课程和退出课程
源码见:"fastapi_study_road-learning_system_online_courses: fastapi框架实战之--在线课程学习系统" 加入课程 我们先看下加入课程 1.是否登录 2.课程是否存在 3.是否已经存在 4.添加 首先实现逻辑 def get_student_course(db: Session, course: int…...

【赛事推荐】2024中国高校计算机大赛人工智能创意赛
“中国高校计算机大赛”(China Collegiate Computing Contest,简称C4)是面向全国高校各专业在校学生的科技类竞赛活动,于2016年由教育部高等学校计算机类专业教学指导委员会、教育部高等学校大学软件工程专业教学指导委员会、教育…...

C++沉思:预处理和编译
预处理和编译 条件编译源代码使用方式典型示例原理 使用static_assert执行编译时断言检查使用方式原理 在C中,编译是将源代码转换为机器代码并组织在目标文件中,然后将目标文件链接在一起生成可执行文件的过程。编译器实际上一次只处理一个文件ÿ…...
交通数据处理-计算途径某些路段的车辆数
根据车辆的运行轨迹,计算先经过某些路段,再经过某些路段的车辆数。 欢迎关注本人公众号--交通数据探索师 如下表, 其中:vehicle: 车辆编号;route: 车辆轨迹。 以第一行为例,车辆car1按顺序经过了路段123…...
从0到1入门系列 | 崖山公开课再加码,三小时带你入门崖山数据库!
对不断更新的技术心生迷茫 不知如何正确的提升自己? 对新兴的国产数据库领域充满好奇 却不知从何入手? 崖山专家团队精心筹备 《从0到1入门》系列直播课 6节课 三小时 助力数据库小白变身技术高手 掌握最前沿的数据库技术 现在开始 开启职场“金…...

Powershell自定义带参数的别名
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、函数二、使用步骤总结 前言 之前写了一篇文章定义别名让powershell尽可能接近Unix风格,增强两者的互操作性,今天给出方法可以定义带…...
文件操作相关的精讲
目录: 思维导图 一. 文件定义 二. 文件的打开和关闭 三. 文件的顺序读写操作 四. 文件的随机读写操作 五. 文本文件和二进制文件 六. 文件读取结束的判断 七.文件缓冲区 思维导图: 一. 文件定义 1.文件定义 C语言中,文件是指一组相…...
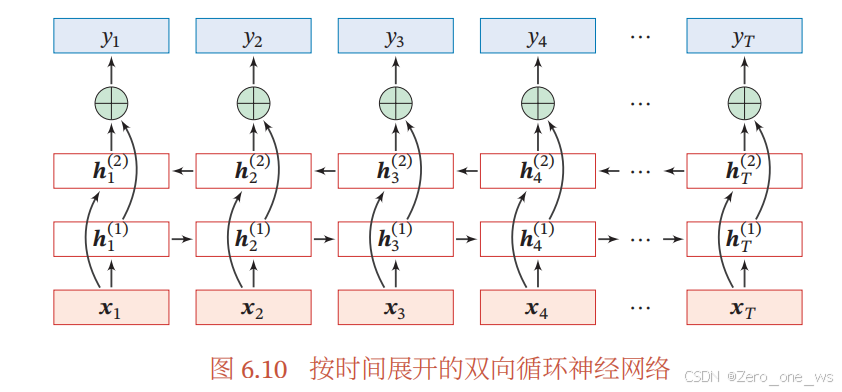
05 循环神经网络
目录 1. 基本概念 2. 简单循环网络 2.1 简单循环网络 2.2 长程依赖问题 3. 循环神经网络的模式与参数学习 3.1 循环神经网络的模式 3.2 参数学习 4. 基于门控的循环神经网络 4.1 长短期记忆网络 4.2 LSTM网络的变体网络 4.3 门控循环单元网络 5. 深层循环神经网络…...
C#初级——条件判断语句、循环语句和运算符
条件判断语句 简单的条件判断语句,if()里面进行条件判断,如果条件判断正确就执行语句块1,如果不符合就执行语句块2。 if (条件判断) { 语句块1 } else { 语句块2 } int age 18;if (age < 18){Console.WriteLine("未…...

Laravel路由模型绑定:简化依赖注入的艺术
Laravel路由模型绑定:简化依赖注入的艺术 引言 在现代Web应用开发中,Laravel框架以其优雅和简洁的代码而闻名。Laravel的路由模型绑定(Route Model Binding)是框架提供的一项强大功能,它允许开发者在路由处理中自动注…...
【vue前端项目实战案例】之Vue仿饿了么App
本文将介绍一款仿“饿了么”商家页面的App。该案例是基于 Vue2.0 Vue Router webpack ES6 等技术栈实现的一款外卖类App,适合初学者进行学习。 项目源码下载链接在文章末尾 1 项目概述 该项目是一款仿“饿了么”商家页面的外卖类App,主要有以下功能…...
)
冷热分离——Java全栈知识(36)
之前在面试的时候有老师问: 我看你使用了水平分表,但是如果有些 1%的数据占了访问量的 90%,而剩下 99%的数据只占了访问量的 10%。这种情况怎么处理。 1 、冷热分离 1.1、什么是冷热分离 冷热分离指的是在处理数据时将数据库分为冷库和热库…...

3分钟搞定GitHub中文界面:终极汉化插件使用指南
3分钟搞定GitHub中文界面:终极汉化插件使用指南 【免费下载链接】github-chinese GitHub 汉化插件,GitHub 中文化界面。 (GitHub Translation To Chinese) 项目地址: https://gitcode.com/gh_mirrors/gi/github-chinese 你是否曾经因为GitHub的英…...

Redis容器内存统计失真与cgroup隔离失效深度解析
1. 这不是“老漏洞复现”,而是Redis容器化部署中被集体忽视的底层内存契约崩塌你有没有遇到过这样的情况:一套跑在Docker里的Redis服务,配置没动、版本没升、流量平稳,某天凌晨突然开始OOM Killer杀进程,docker stats显…...

20年AI平台建设者私藏清单:5款“伪开源”商业工具 vs 3款真正企业级开源AI引擎——性能、支持、审计三重穿透测评
更多请点击: https://codechina.net 第一章:20年AI平台建设者私藏清单:5款“伪开源”商业工具 vs 3款真正企业级开源AI引擎——性能、支持、审计三重穿透测评 在构建高可用AI基础设施的二十年实践中,我们反复验证一个残酷事实&am…...

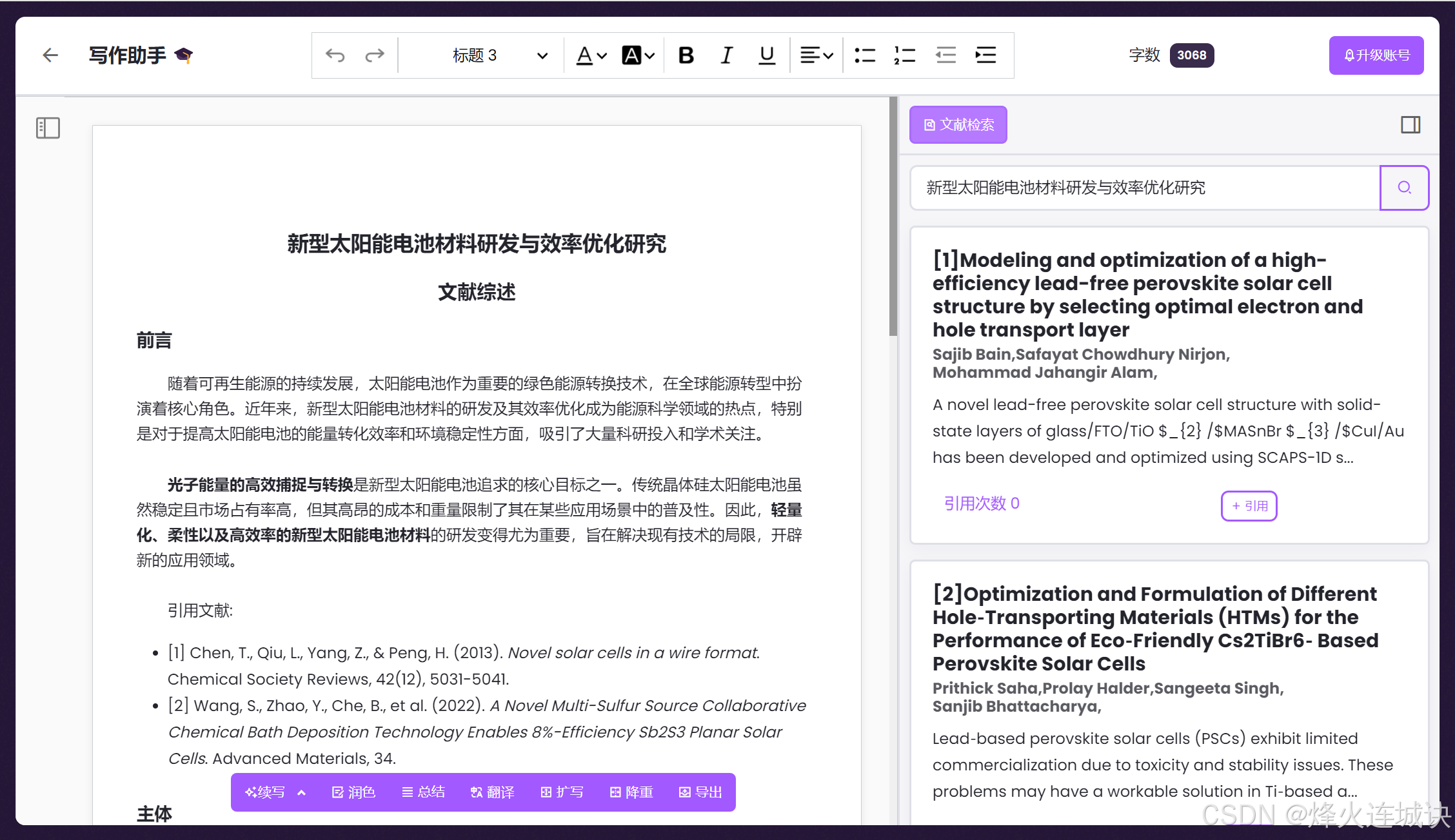
2026年AI写作辅助网站实测精选:5款神器从选题到格式全流程护航
写论文的难处,是每个科研人和学生都心知肚明的“隐形负担”。选题无从下手,文献检索耗时费力,格式排版反复调整,查重降重更是让人抓耳挠腮。2026年的AI工具早已不再是冷冰冰的“文字机器”,而是进化成了能理解学术逻辑…...

DeepSeek RAG场景下的请求倾斜难题,如何用一致性哈希+请求指纹预分流实现毫秒级负载再均衡?
更多请点击: https://kaifayun.com 第一章:DeepSeek RAG场景下请求倾斜的本质与影响 在 DeepSeek RAG(Retrieval-Augmented Generation)系统中,请求倾斜并非简单的流量分布不均现象,而是由检索模块、向量数…...

OpenSSH ssh-agent CVE-2023-38408 漏洞修复实战指南
1. 这个漏洞不是“修个配置就能好”的那种——它藏在ssh-agent的共享库加载机制里OpenSSH-ssh-agent CVE-2023-38408,光看编号你可能觉得是又一个常规权限提升补丁。但实际动手前我翻了三天源码才意识到:这不是改几行配置、重启服务就能闭环的问题。它直…...

Flut Renamer:免费跨平台批量文件重命名工具的完整使用指南
Flut Renamer:免费跨平台批量文件重命名工具的完整使用指南 【免费下载链接】renamer Flut Renamer - A bulk file renamer written in flutter (dart). Available on Linux, Windows, Android, iOS and macOS. 项目地址: https://gitcode.com/gh_mirrors/ren/ren…...
)
揭秘Gemini真实生命周期曲线:Gartner未公开的18个月LTV拐点图谱及3种续命策略(含SLA重谈判话术)
更多请点击: https://kaifayun.com 第一章:Gemini生命周期价值分析 Gemini 作为 Google 推出的多模态大模型系列,其生命周期价值不仅体现在推理性能与响应速度上,更贯穿于模型训练、部署、监控、迭代与退役的全链路环节。理解其生…...

3步快速实现Android Studio完整汉化:告别英文困扰,提升开发效率
3步快速实现Android Studio完整汉化:告别英文困扰,提升开发效率 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack…...

终极Python移动应用打包神器:5分钟快速上手Android开发
终极Python移动应用打包神器:5分钟快速上手Android开发 【免费下载链接】python-for-android Turn your Python application into an Android APK 项目地址: https://gitcode.com/gh_mirrors/py/python-for-android 你是否曾经梦想过用自己最熟悉的Python语言…...