机器人阻抗控制实现方法及其存在的科学问题
一、机器人阻抗控制的实现方法
机器人阻抗控制主要分为两种方法:基于位置的阻抗控制和基于力的阻抗控制。
- 基于位置的阻抗控制:
- 工作原理:让机器人电机在位置模式下工作,通过发送目标位置和速度实现阻抗特性。
- 主要目的:控制机器人的位置精度和运动轨迹。
- 特点:该方法侧重于位置控制,通过调整阻抗参数来影响机器人对环境变化的响应。
- 基于力的阻抗控制:
- 工作原理:需要让机器人的电机处于力矩模式工作,考虑机器人的动力学模型,直接计算出需要的力矩给驱动器。
- 主要目的:控制机器人与环境之间的作用力和反作用力,实现更好的顺应性。
- 特点:该方法侧重于力控制,需要使用力觉传感器(如六维力传感器)来测量机器人与环境之间的作用力,从而实现对力和位置的精准控制。
二、机器人阻抗控制存在的科学问题
- 环境建模问题:
- 问题描述:实现有效的阻抗控制需要对机器人与环境之间的力学特性进行准确建模,包括环境的刚度、阻尼和质量等参数。建模不准确可能导致控制性能下降,甚至引发不稳定或振荡现象。
- 解决方案:采用更先进的建模技术和方法,如基于机器学习的建模技术,以提高模型的准确性和鲁棒性。 </
相关文章:

机器人阻抗控制实现方法及其存在的科学问题
一、机器人阻抗控制的实现方法 机器人阻抗控制主要分为两种方法:基于位置的阻抗控制和基于力的阻抗控制。 基于位置的阻抗控制: 工作原理:让机器人电机在位置模式下工作,通过发送目标位置和速度实现阻抗特性。主要目的:控制机器人的位置精度和运动轨迹。特点:该方法侧重…...

解决:xxx.xxx/res/modules/.ds_store: error: the file name must end with .xml 问题
解决:xxx.xxx/res/modules/.ds_store: error: the file name must end with .xml 问题 该问题是由于Android Studio校验到布局文件中存在不以.xml后缀名结尾的文件,这个文件就是.DS_store,它是Mac上系统自动创造的隐藏文件,把该文…...
EEtrade:区块链技术的五大应用场景
区块链技术,作为近年来备受瞩目的颠覆性技术,其去中心化、透明化、安全性和可追溯性等特性,为各行各业带来了前所未有的机遇。从数字货币到金融资产交易结算,从数字政务到存证防伪,再到数据服务,区块链正逐…...

DAO、DPO、DTO、POJO、VO、BO、EBO
目录 1. DAO (Data Access Object) 2. DPO (Data Persistence Object) 3. DTO (Data Transfer Object) 4. POJO (Plain Old Java Object) 5. VO (Value Object) 6. BO (Business Object) 7. EBO (Entity Bean Object) 在Java开发中,尤其是与数据访问和对象映…...

数据库期末复习
数据库期末复习 分析题 1 (1)使用数据库系统可以大大提高应用开发的效率,方便用户的使用减轻数据库系统管理人员维护的负担,请回答数据库系统有哪些部分组成?什么是数据库管理系统,其主要功能包括哪些方而&…...

pyinstaller带浏览器一起打包playwright 独立运行exe
前置条件 没有安装自带环境,则 playwright install 安装了自带的浏览器 查看playwright的浏览器的位置 playwright install --dry-run 打开此文件夹可以看到 新建一个多层级目录playwright\driver\package.local-browsers 然后复制chromium-1124到playwright\dr…...

docker添加容器服务所需字体
1、在宿主机新建chinese目录 [rootHS-AP-application ~]#mkdir /usr/share/fonts/chinese 2、上传字体 把windows c盘下的Windows/Fonts下的所有字段上传至/usr/shared/fonts/chinese 3、授权chinese目录 chmod -R 755 /usr/share/fonts/chinese 4、生成fonts.scale文件 …...

Java面试八股之Spring AOP 和 AspectJ AOP 的区别
Spring AOP 和 AspectJ AOP 的区别 Spring AOP 和 AspectJ AOP 是两种不同的面向切面编程(Aspect-Oriented Programming, AOP)实现。它们各有特点,适用于不同的场景。下面是一些主要的区别: 1. 实现机制 Spring AOP: 基于代理…...
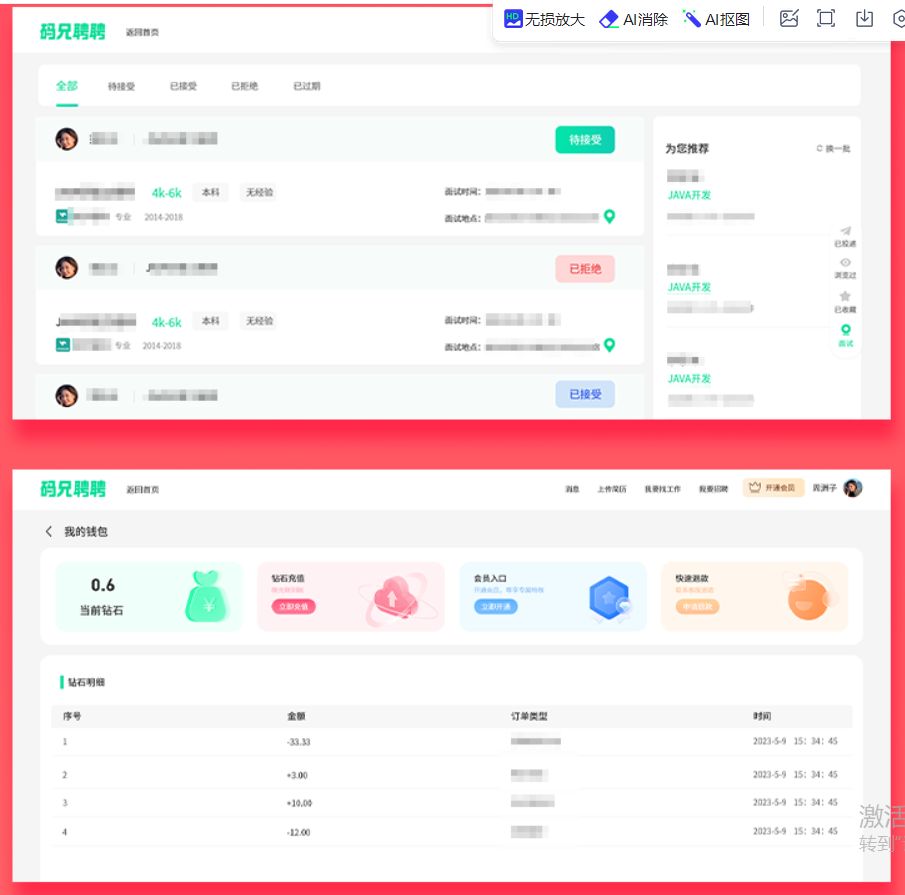
Java人力资源招聘社会校招类型招聘系统PC端
🔍【揭秘】人力资源新利器!社会校招一站式PC端招聘系统全攻略🚀 🌈 开篇引言:招聘新纪元,效率为王! Hey小伙伴们,你是否还在为繁琐的招聘流程头疼不已?🤯 面…...

C# 知识点总结
入门 C#程序在.NET上运行,.NET framework包含两个部分: ①:.NET framework类库 ②:公共语言运行库CLR(.NET虚拟机) CLS(公共语言规范) CTS(通用类型系统) .N…...

【ffmpeg命令入门】视频的旋转与翻转
文章目录 前言什么时候需要使用旋转与翻转1. 视频拍摄方向不正确2. 视频编辑特效使用什么参数1. 旋转视频 - transpose2. 水平翻转视频 - hflip3. 垂直翻转视频 - vflip 总结 前言 在视频编辑的过程中,我们经常会遇到需要旋转或翻转视频的情况。无论是因为拍摄时相…...
:深入理解 C语言结构体 位域 的概念)
学懂C语言(二十五):深入理解 C语言结构体 位域 的概念
目录 一、位域的基本概念 二、位域的定义 三、位域的内存分配和大小计算 示例1:简单位域 示例2:跨越多个存储单元 注意事项 结构体对齐控制 总结 C语言中的位域(Bit-Field)是一种特殊的数据结构,允许在结构体中…...

LLM推理优化——KV Cache篇(百倍提速)
LLM推理优化——KV Cache篇(百倍提速) 注意:KV Cache本质上是空间换时间的技术。与计算机组成原理中的cache不同,它不涉及访存优化。 不知道大家在用LLM的时候,有没有注意到一个问题:我们在输入我们的问题…...

Linux进程--system
...

[Office] Word 特殊字符
0 打开“特殊字符集” 依次选择:Insert -> Symbol -> More Symbol 1 带圈编号 字体Font选择Wingdings...
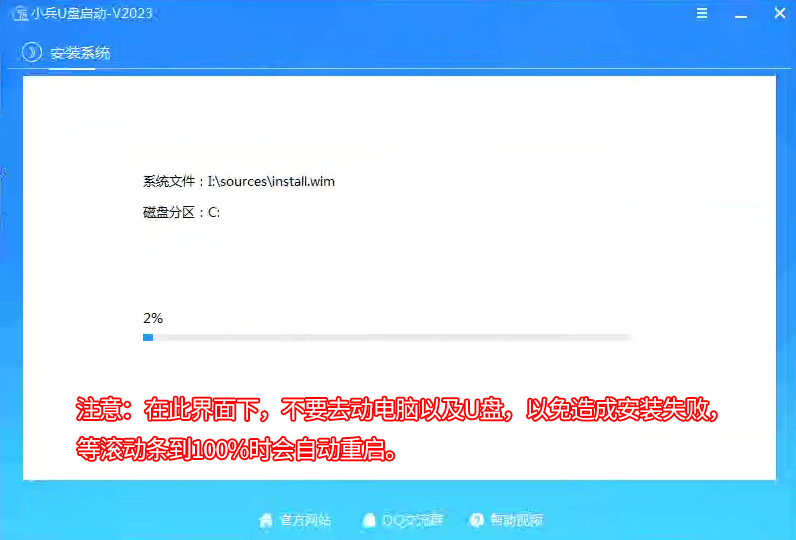
联想电脑怎么重装系统_联想电脑U盘重装win10详细图文教程
联想电脑怎么重装系统?在当今科技发展迅猛的时代,联想电脑已经成为了人们生活中不可或缺的一部分。然而,随着时间的推移,我们可能会遇到一些问题,例如系统崩溃或者需要更换操作系统。这时,使用U盘来重新安装…...
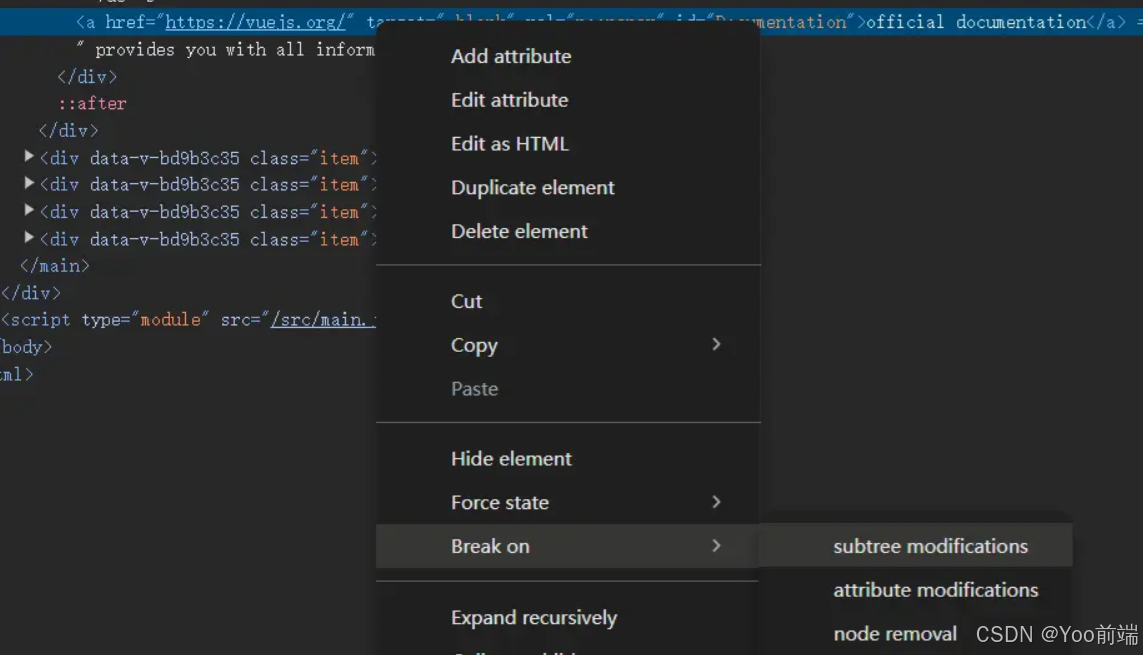
前端开发者必备:揭秘谷歌F12调试的隐藏技巧!
前言 使用断点(breakpoint)是调试 JavaScript 代码的一种非常有效的方式。通过在代码的关键位置设置断点,可以阻止页面的状态变化,从而方便地检查和修改页面的当前状态。 1. 使用 setTimeout 配合 debugger 和 console.log setTi…...

vivado IP_REPO_PATHS
此属性允许您创建自定义IP目录,以与Vivado Design Suite一起使用。 IP_REPO_PATHS属性定义了一个或多个目录的路径,这些目录包含 第三方或用户定义的IP。指定的目录和任何子目录是 搜索要添加到Vivado Design Suite IP目录以用于设计的IP定义 进入或与IP…...

前端代码混淆加密(使用Terser、WebpackObfuscator)
零、相关技术及版本号 "vue": "2.6.12", "vue/cli-service": "4.4.6", "javascript-obfuscator": "^4.1.1", "terser-webpack-plugin": "^4.2.3", "vue-template-compiler": &quo…...

【复读EffectiveC++24】条款24:若所有参数皆需类型转换,请为此采用non-member函数
条款24:若所有参数皆需类型转换,请为此采用non-member函数 一、问题引入 举个例子,如果你设计一个表示有理数的类,允许从整型到有理数的隐式转换应该是合理的。在C内置类型中,从int转换到double也是再合理不过的了&a…...

2026 年 5 月 AI 热点:大模型、硬件、人形机器人全面升级
一、大模型技术突破 | LLM Technology Breakthroughs 1.1 OpenAI GPT‑5.5 正式成为ChatGPT默认模型 | GPT‑5.5 Becomes ChatGPT Default Model 英文内容 | English On May 5, 2026, OpenAI officially rolled out GPT‑5.5 Instant as the new default model for ChatGPT, …...

迁移学习提升可穿戴设备睡眠监测精度的技术解析
1. 项目概述:迁移学习如何提升可穿戴设备的睡眠监测精度作为一名长期关注健康监测技术的从业者,我见证了可穿戴设备在睡眠监测领域的快速发展。但一个核心痛点始终存在:基于PPG(光电容积图)等外周生理信号的可穿戴设备…...

AXI总线协议详解:从核心特性到工程实践
1. AXI总线协议概述AXI(Advanced eXtensible Interface)是Arm公司开发的AMBA(Advanced Microcontroller Bus Architecture)系列总线协议中的一员,专门用于片上系统(SoC)中组件之间的高性能点对点…...

GPT-4万亿参数仅激活2%?揭秘MoE稀疏激活的工程真相
1. 项目概述:参数规模与稀疏激活的真相拆解“GPT-4 Has 1.8 Trillion Parameters. It Uses 2% of Them Per Token.”——这句话过去两年在技术社区反复刷屏,常被当作“大模型已突破算力瓶颈”的佐证,也常被误读为“GPT-4只用360亿参数&#x…...

C++ Kafka实战:用librdkafka手写一个带自定义分区和事件回调的生产者
C Kafka实战:构建高性能生产者客户端的深度实践 在分布式系统架构中,消息队列作为解耦生产者和消费者的关键组件,其重要性不言而喻。而Apache Kafka凭借其高吞吐、低延迟和水平扩展能力,已成为现代实时数据管道和流处理应用的首选…...

pytorch-adapter:让 PyTorch 模型“无缝”跑在昇腾 NPU 上
pytorch-adapter:让 PyTorch 模型“无缝”跑在昇腾 NPU 上 之前帮朋友看 PyTorch 模型适配 CANN 的代码,发现他手写了很多适配层——把自己的 MyModel 一层层翻译成 AscendCL 接口,光写适配层就写了 2,000 行。 我告诉他:不用手…...
)
DeepSeek微服务拆分实战:从单体到弹性集群的7步标准化迁移手册(含流量染色+灰度发布Checklist)
更多请点击: https://codechina.net 第一章:DeepSeek微服务架构演进的底层逻辑与决策框架 微服务架构并非技术堆砌的结果,而是业务复杂度、组织演进节奏与工程效能诉求三者动态博弈下的系统性解法。DeepSeek 在模型训练平台、推理网关、数据…...

12个简单步骤:CFDPython教你从零掌握计算流体动力学核心算法
12个简单步骤:CFDPython教你从零掌握计算流体动力学核心算法 【免费下载链接】CFDPython A sequence of Jupyter notebooks featuring the "12 Steps to Navier-Stokes" http://lorenabarba.com/ 项目地址: https://gitcode.com/gh_mirrors/cf/CFDPyth…...

电动工具MCU选型与开发:从FOC算法到高集成度设计的工程实践
1. 项目概述:为什么电动工具需要一颗“聪明”的MCU?大家好,我是覃杰,在瑞萨电子上海分公司负责MCU相关的技术方案支持。今天我们不聊那些高大上的概念,就从一个工程师最熟悉的场景聊起:你手里那把正在“嗡嗡…...

Windows 11终极优化指南:Win11Debloat一键提升51%系统性能
Windows 11终极优化指南:Win11Debloat一键提升51%系统性能 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter an…...