STM32 定时器移相任意角度和占空比,频率可调
由于使用了中断修改翻转的CCR值,对于频率超250K以上不太适用.

void Motor1_Init(Motor MotorChValue)
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;NVIC_InitTypeDef NVIC_InitStructure;/*设置中断*/ NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure); /*时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd( MOTOR1_CLK | RCC_APB2Periph_AFIO, ENABLE);/*通道引脚*/ GPIO_InitStructure.GPIO_Pin = MOTOR1_A1_PIN | MOTOR1_B1_PIN | MOTOR1_A2_PIN | MOTOR1_B2_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(MOTOR1_A1_PORT, &GPIO_InitStructure);//初始化GPIOGPIO_InitStructure.GPIO_Pin = MOTOR1_A2_PIN | MOTOR1_B2_PIN; GPIO_Init(MOTOR1_A2_PORT, &GPIO_InitStructure);//初始化TIM3TIM_TimeBaseStructure.TIM_Period = 65535; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =72-1; //72分频,TIM3 = 1MhzTIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //1分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_Pulse = MotorChValue.Ch1Value;TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC1TIM_OCInitStructure.TIM_Pulse = MotorChValue.Ch2Value;TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC2TIM_OCInitStructure.TIM_Pulse = MotorChValue.Ch3Value;TIM_OC3Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC3TIM_OCInitStructure.TIM_Pulse = MotorChValue.Ch4Value;TIM_OC4Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC4TIM_ITConfig(TIM3, TIM_IT_CC1|TIM_IT_CC2|TIM_IT_CC3|TIM_IT_CC4,ENABLE);TIM_SetCounter(TIM3,0);
// TIM_Cmd(TIM3, DISABLE); }void ConfigTimer(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB,ENABLE);TIM_DeInit(TIM3);TIM_TimeBaseStructure.TIM_Prescaler = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned1;TIM_TimeBaseStructure.TIM_Period = (Fsys/2) / Fpwm;TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_OutputNState = TIM_OutputState_Disable;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_Low;TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;TIM_OCInitStructure.TIM_Pulse = (((Fsys/2) / Fpwm) * PWM_DUTY) / 100;TIM_OC3Init(TIM3,&TIM_OCInitStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;TIM_OCInitStructure.TIM_Pulse = (((Fsys/2) / Fpwm) * (100-PWM_DUTY)) / 100;TIM_OC4Init(TIM3,&TIM_OCInitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);TIM_CtrlPWMOutputs(TIM3, ENABLE);TIM_Cmd(TIM3,ENABLE);
}
相关文章:
STM32 定时器移相任意角度和占空比,频率可调
由于使用了中断修改翻转的CCR值,对于频率超250K以上不太适用. void Motor1_Init(Motor MotorChValue) { GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;NVIC_InitTypeDef NVIC_Ini…...

C++ 与其他编程语言区别_C++11/14/17新特性总结
C11 decltype类型推导 decltype不依赖于初始化,根据表达式类推导类型 auto b :根据右边a的初始值来推导出变量的类型,然后将该初始值赋给bdecltype 则是根据a表达式来推导类型,变量的初始值与表达式的值无关表达式类型注意点&…...

玩转云服务:Google Cloud谷歌云永久免费云服务器「白嫖」 指南
前几天,和大家分享了: 玩转云服务:Oracle Cloud甲骨文永久免费云服务器注册及配置指南 相信很多同学都卡在了这一步: 可用性域 AD-1 中配置 VM.Standard.E2.1.Micro 的容量不足。请在其他可用性域中创建实例,或稍后…...

用18讲必看:宇哥亲划重点内容+核心题总结
25考研结束之后,张宇老师的风评可能会两极分化 其中一波把张宇老师奉为考研数学之神,吹捧「三向解题法」天下无敌。 另外一波对张宇老师的评价负面,在网上黑张宇老师! 为什么会这么说,因为张宇老师的新版36讲争议太…...

什么是安全生产痕迹化管理?如何做到生产过程中全程痕迹化管理?
安全生产痕迹化管理,简单来说,就是通过记录一些“信息”来确保安全工作的进展。这些方法包括记会议内容、写安全日记、拍照片、签字盖章、指纹识别、面部识别还有手机定位等。记录下来的文字、图片、数据和视频,就像一个个“脚印”࿰…...

VIsual Studio:为同一解决方案下多个项目分别指定不同的编译器
一、引言 如上图,我有一个解决方案【EtchDevice】,他包含两个(甚至更多个)子项目,分别是【DeviceRT】和【DeviceWin】,见名知意,我需要一个项目编译运行在RTOS上,譬如一个名叫INTime…...
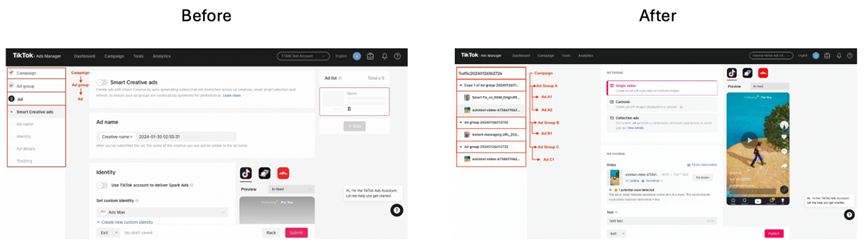
Flat Ads资讯:Meta、Google、TikTok 7月产品政策速递
Flat Ads拥有全球媒介采买(MediaBuy)业务,为方便广告主及时了解大媒体最新政策,Flat Ads将整理大媒体产品更新月报,欢迎大家关注我们及时了解最新行业动向。 一、Meta 1、Reels 应用推广现可突出显示应用评分、点评和下载量 为了不断优化 Instagram 上的广告体验和广告表现,…...

嵌入式C++、ROS 、OpenCV、SLAM 算法和路径规划算法:自主导航的移动机器人流程设计(代码示例)
在当今科技迅速发展的背景下,嵌入式自主移动机器人以其广泛的应用前景和技术挑战吸引了越来越多的研究者和开发者。本文将详细介绍一个嵌入式自主移动机器人项目,涵盖其硬件与软件系统设计、代码实现及项目总结,并提供相关参考文献。 项目概…...

数据安全堡垒:SQL Server数据库备份验证与测试恢复全攻略
数据安全堡垒:SQL Server数据库备份验证与测试恢复全攻略 在数据库管理中,备份是确保数据安全的关键环节,但仅仅拥有备份是不够的,验证备份的有效性并能够从备份中成功恢复数据同样重要。SQL Server提供了一系列的工具和方法来执…...

嵌入式人工智能(40-基于树莓派4B的水滴传感器和火焰传感器)
虽然这两个传感器水火不容,我还是把他们放到一起了。本文是有线传感器的最后一个部分了。后面如果还有文章介绍有线传感器,也是补充学习其他内容不得已而为之。如果不是,就当我没说,哈哈。 1、水滴传感器 水滴传感器又称雨滴传感…...

EF访问PostgreSql,如何判断jsonb类型的数组是否包含某个数值
下面代码判断OpenUserIds(long[]类型的jsonb)字段,是否包含 8 basequery basequery.Where(m > Microsoft.EntityFrameworkCore.NpgsqlJsonDbFunctionsExtensions.JsonContains(EF.Functions, m.OpenUserIds, new long[] { 8 }));...
控件 | 8.1、QComboBox)
Qt 实战(8)控件 | 8.1、QComboBox
文章目录 一、QComboBox1、简介2、功能特性2.1、添加和移除项目2.2、设置和获取当前选中项2.3、模型/视图架构2.4、信号与槽 3、总结 前言: QComboBox 是 Qt 框架中一个非常实用的控件,它允许用户从一个下拉列表中选择一个项目。这个控件广泛应用于需要用…...

模拟算法概览
前言 LeetCode上的模拟算法题目主要考察通过直接模拟问题的实际操作和过程来解决问题。这类题目通常不需要高级的数据结构或复杂的算法,而是通过仔细的逻辑和清晰的步骤逐步解决。 适合解决的问题 模拟算法适合用来解决那些逻辑明确、步骤清晰且可以逐步执行的问…...

uniapp手写滚动选择器
文章目录 效果展示HTML/Template部分:JavaScript部分:CSS部分:完整代码 没有符合项目要求的选择器 就手写了一个 效果展示 实现一个时间选择器的功能,可以选择小时和分钟: HTML/Template部分: <picker…...

智慧医院临床检验管理系统源码(LIS),全套LIS系统源码交付,商业源码,自主版权,支持二次开发
实验室信息系统是集申请、采样、核收、计费、检验、审核、发布、质控、查询、耗材控制等检验科工作为一体的网络管理系统。它的开发和应用将加快检验科管理的统一化、网络化、标准化的进程。一体化设计,与其他系统无缝连接,全程化条码管理。支持危机值管…...
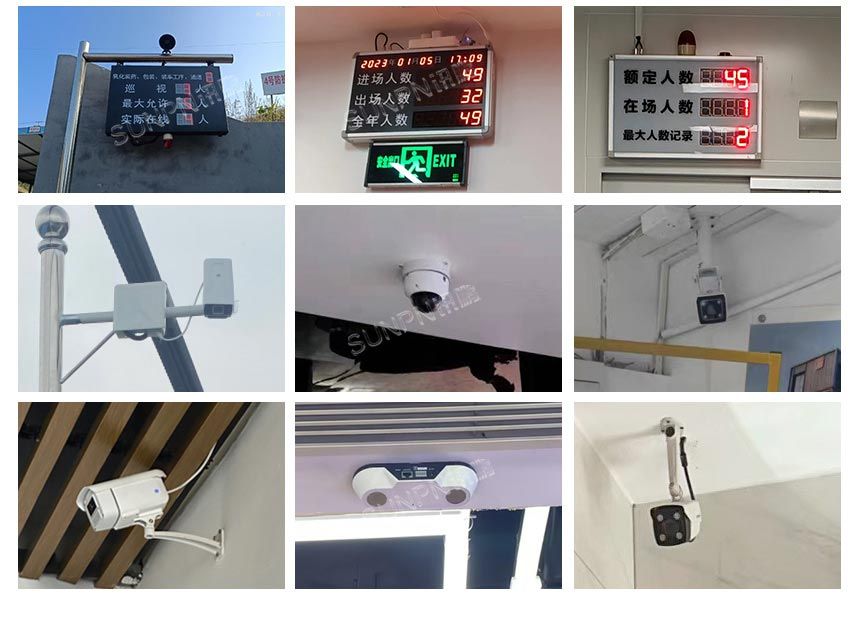
超市是怎样高效完成客流统计与客流分析
随着科技的进步,越来越多的超市开始采用现代化的客流统计系统来优化日常运营和提升顾客体验。本文将探讨超市客流统计面临的难题、客流统计系统的构成及其应用场景,以及系统如何通过高识别率和热力图分析等功能为超市带来实际效益。 一、景区客流统计难题…...

进程地址空间,零基础最最最详解
目录 建议全文阅读!!! 建议全文阅读!!! 建议全文阅读!!! 一、什么是地址空间 1、概念 2、主要组成部分 3、特点和作用 (1)虚拟化…...

全面解锁:通过JSP和Ajax实现钉钉签到数据展示及部门筛选功能
要在JSP页面中调用钉钉的签到接口,并将签到数据展示在页面上,同时提供部门筛选功能,你可以按照以下步骤操作: 准备钉钉API: 你需要首先获取钉钉开放平台的API凭证(如access_token)。请参考钉钉开…...

LLM应用-prompt提示:让大模型总结生成PPT
参考: https://mp.weixin.qq.com/s/frKOjf4hb6yec8LzSmvQ7A 思路:通过大模型生成markdown内容,通过markdown去生成PPT 技术:Marp(https://marp.app/)这里用的这个工具进行markdown转PPT 1、让大模型生成Ma…...

安全防护软件的必要性:从微软蓝屏事件谈起
最近微软遭遇了的大规模蓝屏事件,让全球很多用户措手不及。这次事件告诉我们,保护我们的电脑和数据,安全防护软件是多么重要。 微软蓝屏事件源于网络安全公司CrowdStrike的技术更新错误,导致全球范围内大量Windows用户系统崩溃&a…...
)
Sora 2训练Pipeline为何突然兼容Gaussian Splatting?:逆向解析OpenAI最新隐式-显式混合表征专利(US20240177892A1)
更多请点击: https://intelliparadigm.com 第一章:Sora 2 Gaussian Splatting 技术融合背景 Sora 2 作为 OpenAI 推出的下一代视频生成模型,已深度集成高斯点绘(Gaussian Splatting)技术以提升动态场景的几何保真度…...
)
从find到ind2sub:Matlab数据筛选后操作的完整工作流(以R2023b为例)
从find到ind2sub:Matlab数据筛选后操作的完整工作流(以R2023b为例) 在数据分析与科学计算领域,Matlab作为一款强大的工具,其矩阵操作能力尤为突出。面对大型矩阵或高维数组时,如何高效地定位并处理特定条件…...

如何快速上手Unitree Go2 ROS2 SDK:模块化机器人开发完整指南
如何快速上手Unitree Go2 ROS2 SDK:模块化机器人开发完整指南 【免费下载链接】go2_ros2_sdk Unofficial ROS2 SDK support for Unitree GO2 AIR/PRO/EDU 项目地址: https://gitcode.com/gh_mirrors/go/go2_ros2_sdk Unitree Go2 ROS2 SDK是为宇树科技GO2系列…...

如何准确计算宏基因组覆盖率?CoverM工具的全方位技术解析
如何准确计算宏基因组覆盖率?CoverM工具的全方位技术解析 【免费下载链接】CoverM Read alignment statistics for metagenomics 项目地址: https://gitcode.com/gh_mirrors/co/CoverM 在宏基因组研究中,覆盖率计算是评估测序深度、估算物种丰度和…...

LogExpert终极指南:Windows平台最强大的免费开源日志分析工具
LogExpert终极指南:Windows平台最强大的免费开源日志分析工具 【免费下载链接】LogExpert Windows tail program and log file analyzer. 项目地址: https://gitcode.com/gh_mirrors/lo/LogExpert LogExpert是Windows平台上最强大的免费开源日志分析工具&…...

3步快速上手Thorium浏览器:新手也能掌握的完整性能优化指南
3步快速上手Thorium浏览器:新手也能掌握的完整性能优化指南 【免费下载链接】thorium Chromium fork named after radioactive element No. 90. Source code and Linux releases. Windows/MacOS/ARM builds served in different repos, links are towards the top o…...

从零搭建Modbus通信测试环境:TCP与串口双模式实战
1. 为什么需要搭建Modbus测试环境? 刚接触工业通信协议时,我最头疼的就是找不到合适的设备做测试。真实PLC动辄上万元,而Modbus作为工业领域最常用的通信协议之一,其实完全可以用软件模拟。搭建本地测试环境的好处很明显ÿ…...

HUSTOJ:如何快速搭建你自己的在线评测系统?完整教程指南
HUSTOJ:如何快速搭建你自己的在线评测系统?完整教程指南 【免费下载链接】hustoj Popular Simple Open Source Online Judge based on PHP/C/MySQL/Linux for ACM/ICPC and NOIP training, with easy installation. 简单实用的开源OJ系统 项目地址: ht…...

《线性代数思维》:以代码和案例开启线性代数实用学习之旅!
《线性代数思维》介绍《线性代数思维》以代码为先导、以案例为基础,介绍了线性代数中最常用的概念,专为那些想理解并应用这些概念,而非仅抽象学习的读者设计。每一章都围绕一个现实世界的问题展开,如模拟网络流量、仿真鸟群飞行或…...

我的世界手机版烦人的村民整合包下载基岩国际版2026最新版
在《我的世界》庞大的模组生态中,烦人的村民整合包(Annoying Villagers) 凭借颠覆性的 NPC 设定、硬核战斗机制与深度剧情互动,成为 Java 版最具影响力的高难度生存整合包之一。由 Pugilist_Steve 主导开发,最新 6.0 版…...