记录|MVS和VM软件使用记录
目录
- 前言
- 一、常用属性
- 二、触发模式选择
- 三、操作注意点
- 四、录像、抓拍功能
- 五、VM软件
- 六、VM软件界面介绍
- 七、VM软件运行间隔
- 八、VM软件图像源
- 九、VM软件相机管理
- 十、获取图像
- 十一、方案存储
- 十一、相机拍摄彩图转换
- 颜色转换
- 快速匹配
- 特征模板:
- 运行参数
- 十二、位置修正
- 基础
- 执行
- 十三、圆查找
- 十四、变量计算
- 十五、格式化
- 十六、标定板生成工具【用完后删除】
- 十七、标定板标定【用完后删除】
- 十八、单位转换
- 十九、运行界面设计
- 更新时间
前言
开始学习如何使用海康威视的MVS。MVS全称:Machine Vision Studion,是海康工业相机的客户端。
一、常用属性
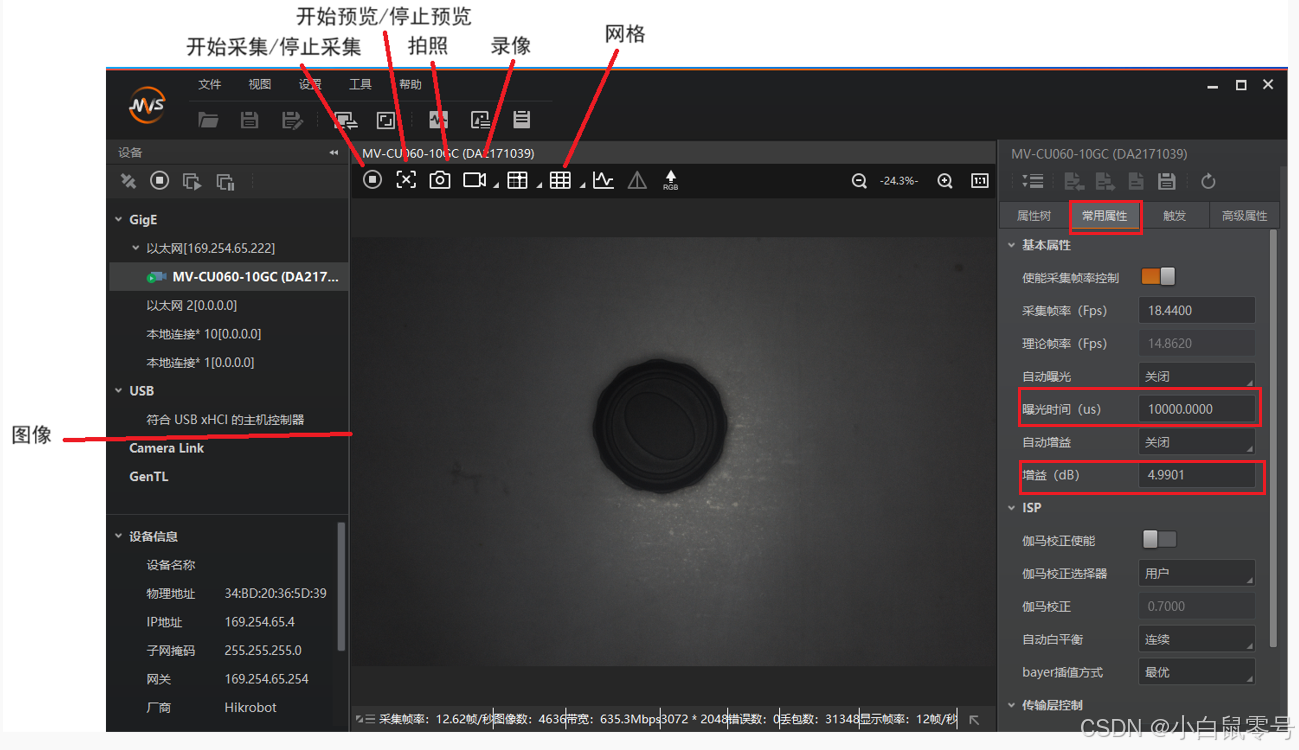
- 曝光时间:曝光时间越长,图像越亮,拍摄速度越慢。
- 增益:增益越大,图像越亮。物体边缘毛刺会更多,轮廓会更不清晰,出现噪点。
- 一般情况:
- 曝光时间控制在:<= 10000us
- 增益控制在:<= 10dB
二、触发模式选择
-
分为:内触发和外触发
-
内触发:直接用软件测量。
触发模式:关闭
触发源:软触发。

-
外触发:通过外部硬件触发。例如使用按钮,PLC,光电感应器等控制拍照。

触发模式:打开
触发源:线路0
触发极性:上升沿【通电路中的上升沿,就是按钮按下去的一瞬间,进行拍照】
下降沿【按钮松开的一瞬间拍照】
高电平【按住按钮时拍照】
低电平【松开按钮时拍照】
三、操作注意点
- 在设置完“常用属性”、“触发模式”后,点击“用户集控制”。
- 加载后,启动配置选择默认。点击用户集1进行保存配置。
注意:保存完后,一定记得要断开相机连接。然后,在进行VM软件中相关的操作。

四、录像、抓拍功能
- 首先,相机连接成功后
- 点击“采集”,之后如果想录像,则点击“录像”按钮。如果想获得当前图片,则点击“抓拍”。【具体位置看下图】

注意:
一般,录像存储在MVS的Data文件夹中,格式为默认的.avi
五、VM软件
VM指:Vision Master

是海康机器人自主研发的机器视觉软件,致力于为客户提供快速搭建视觉应用、解决视觉检测难题的算法工具、能满足视觉定位、尺寸测量、缺陷检测以及信息识别等机器数据应用。
特点:
- 图像化交互
- 流程式编辑
- 可视化配置
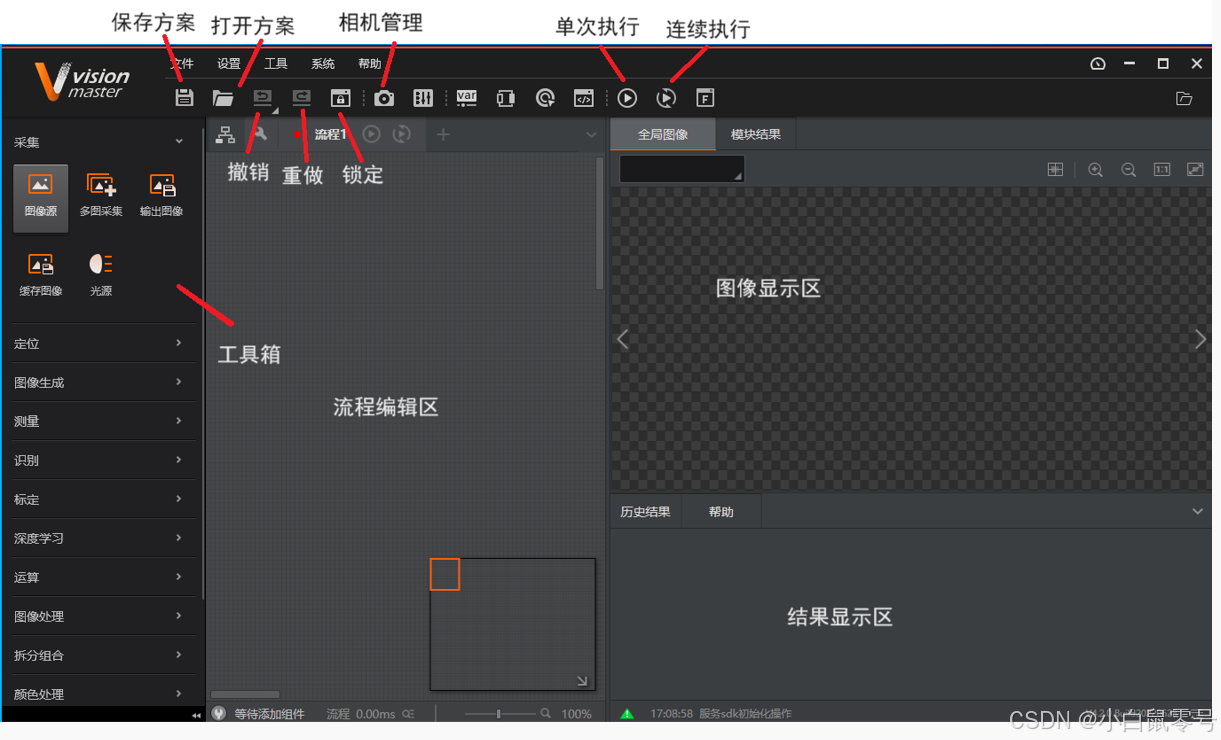
六、VM软件界面介绍
- 工具箱:是视觉工具包的集合。
- 流程编辑区:视觉工具包壳拖拽至该区域进行操作。
- 图像显示区:显示相机拍摄到的经过流程编辑区工具包处理过后的图像。
- 结果显示区:输出对应的工具包模块结果
- 相机管理:设置软件与相机的连接
- 单次执行:执行一次流程编辑区
- 连续执行:连续执行流程编辑区,间隔时间等于设置的运行间隔时间。
七、VM软件运行间隔
- 右击“流程1”,就能看到“设置运行间隔”

- “运行间隔”的时间要>下方状态栏所显示的流程时间。【如下图:】

八、VM软件图像源
- 图像源:
- 相机:实际的相机
- 本地图像:从电脑本地导入图片。MONO8为黑白图像。RGB24为彩色图像。
- SDK:存储卡中
本地图像的导入:位置在图像区的+号图标上【如下图】

九、VM软件相机管理
- 在工具栏中,“相机管理”,在设备列表中添加,选择相机类型为“全局相机”。

- 对全局相机进行设置,首先要找到之前在MVS中的相机名称。之后要找到之前在MVS中保存到的:保存用户集1 【如下图】

- 触发设置:
- 触发源:SOFTWARE

十、获取图像
从第1章到第9章的步骤之后,现在只需要:
点击“流程1”右侧的“连续执行”,就会出现图像。同时图像源的右侧也变成绿色。

十一、方案存储
- 2种存储方案:
- 1、保存方案
- 2、方案另存为
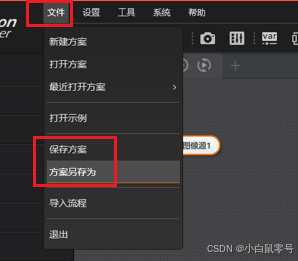
默认的保存方案的类型为.sol
十一、相机拍摄彩图转换
- 首先,相机拍摄的是RGB彩图。VM是处理灰度图像。即,需要进行彩色图转换为灰色图。
颜色转换
- 目的:将RGB彩图转换为灰度图像

快速匹配
- 目的:快速匹配和高精度匹配是归属于“特征匹配”。也就是设置特征。
- 区别:
- 高精度匹配:精度高,耗时长
- 快速匹配:精度一般,耗时短。
- 原理:根据设定的图像特征来找所有符合特征的图像。

特征模板:
-
创建掩膜,即选择特征区域,深度学习中属于感兴趣区域ROI(Region of Interest)。
-
原理:ROI选定好后,软件会去提取这里面的线条特征,具体表现为提取里面的“轮廓特征”。
-
尺度模式:手动或者自动。
-
尺度特征:范围:1~20。代表对ROI中的轮廓提取的细腻程度。一般地,尺度特征越小,轮廓越多越仔细,但是检测速度就会越慢。
-
对比度阈值:控制轮廓点和背景之间的灰度值差。阈值越大,被淘汰的轮廓点越多。
-
橡皮擦:擦除轮廓点。一般,ROI中的轮廓特征有些是多余的,那么就需要橡皮擦进行细微地修正。

运行参数
- 最小匹配分数:就是置信度。相似度。最小匹配分数越高,模板与图像之间的相似性就越高。
- 最大匹配个数:从图像中找到的相似度图像的个数。
- 角度范围:控制图像中的相似图案与模板旋转角度的差异。(平面上的)【如果图像可能会旋转,那么就设置为-180°~180°】

十二、位置修正
基础
- 位于:定位->位置修改
- 目的:精准定位的工具。修正目标运动编译、辅助精准定位。
- 模板中的匹配点、匹配框:叫基准点、基准框。
- 实际检测中的匹配点,匹配框:叫运动点、运动框。
- 原理:通过计算运动点、运动框与基准点、基准框之间的偏移,实现ROI检测框的坐标旋转偏移,让ROI区域能够跟上图像角度和像素变化。

执行
- 保持前面中的模板图不动。
- 点击“创建基准”,确定后就能看到基准点。
- 点击确认。
十三、圆查找
- 位置:定位->圆查找
- 基本参数:
- ROI创建:绘制
- 形状:圆
- 位置修正:打开
- 选择方式:按信息
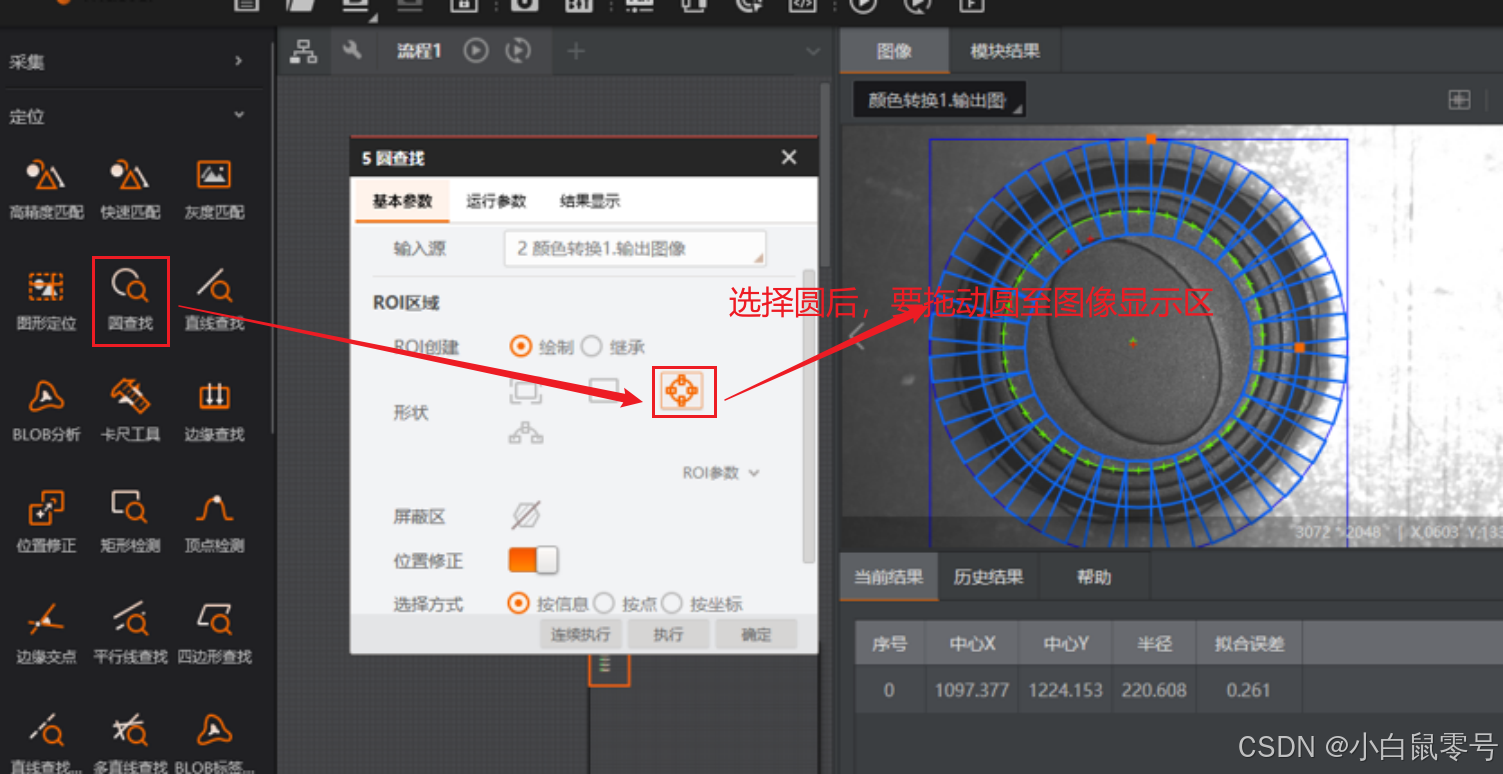
运行参数:
- 边缘类型:【选第一条】
- 第一条:只检测扫描方位内与圆心距离最小的边缘点集合,并拟合成圆。
- 最后一条:则是与圆心距离最大的边缘点集合。
- 最强:只检测扫描范围内梯度最大的边缘点集合。
- 卡尺数量:边缘点的ROI区域数量。

注意:圆查找,默认输出的事圆半径。
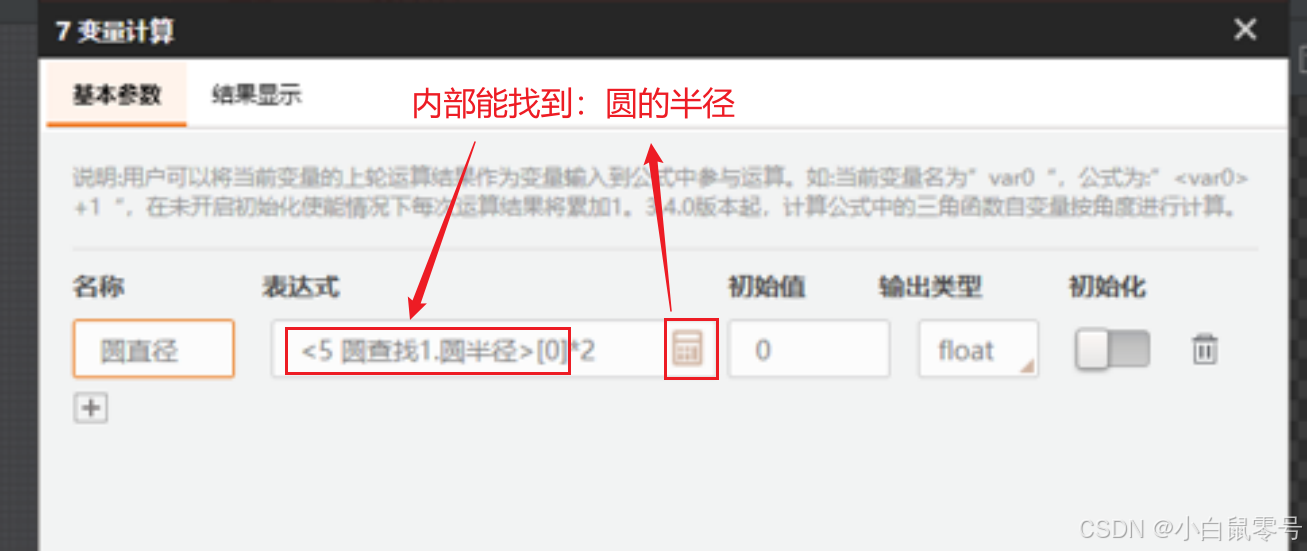
十四、变量计算
位于:运算->变量计算。
- 这里是进行圆的直径计算。
- 由于“十三、圆查找”的运行,我们能在“变脸计算”中找到圆的半径。
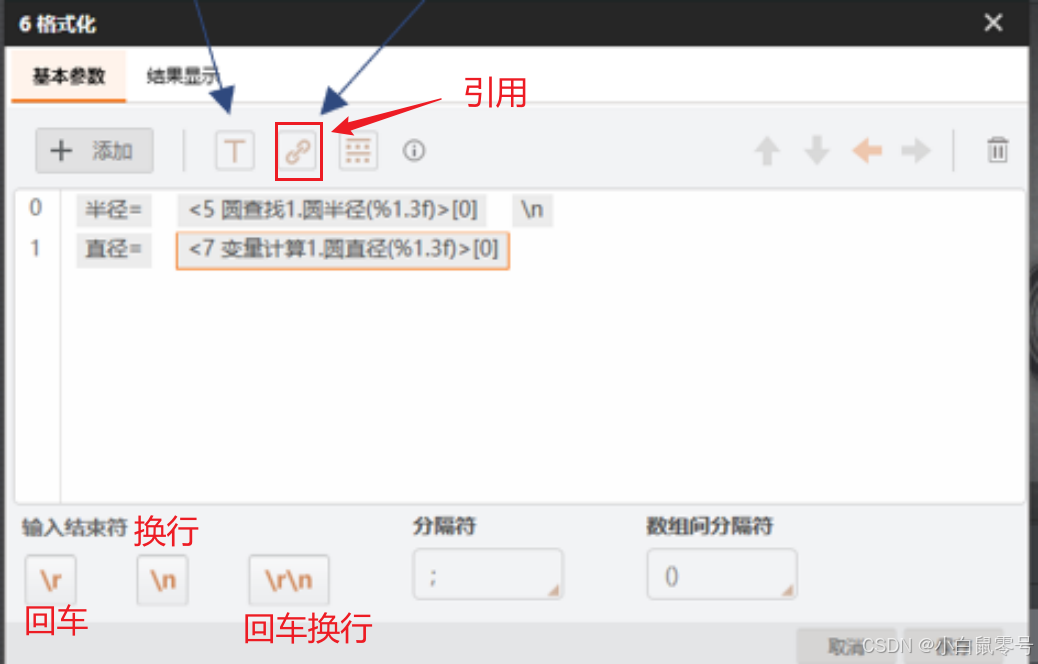
十五、格式化
位于:逻辑->格式化
目的:将数据整合成字符串输出。像ToString()的作用。
注意:
- 格式化输出的结果是按照像素点的个数来算的。我们想要毫米长度的话,是要进行标定板标定。
十六、标定板生成工具【用完后删除】
位置:工具->标定板生成工具

在这种控制台里面输入相关参数进行配置:

配置好的图片是在:VisionMaster4.2.0->Applications->Tools->自研标定板生成Demo 中【如下图示】

caliboard.jpg文件就是生成的标定板图片文件,打印前是不允许进行缩放。【这个文件,是在“标定板标定”中有用】
十七、标定板标定【用完后删除】
位置:标定->标定板标定
- 使用:现将“十六、标定板生成工具”中的标定板.jpg进行打印。
- 打印的标定板置于操作台上,拖拽“标定板标定”至编辑区中。
- 运行参数:
- 坐标系:左手坐标系
- 物理尺寸:“十六、标定板生成工具”中填写的棋盘格间距。
- 标定板类型:海康标定板II型。
上述操作完后,点击生成标定文件,格式为.iwcal。

这里的目的只是为了生成标定文件,之后是需要删除的。
注意:
生成标定文件后标定板即可撤去,换成原来测试的部件。
编辑区的标定板标定工具包亦可删除。否则会大幅增加流程耗时。
十八、单位转换
- 位置:运算->单位转化
- 作用:可转换距离、宽度等像素单位,具体使用需要加载标定文件、设置需要转换的距离、订阅刷新信号、设置像素当量修正即可。

十九、运行界面设计
- 目的:获得实际运行的界面软件。
- 打开:运行界面,之后,点击“界面编辑”【如下图:】
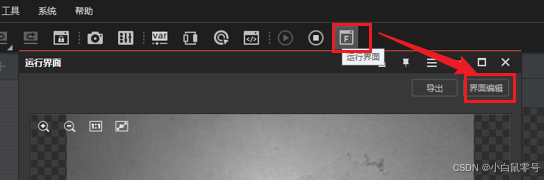
在设计好后,将当前的设计保存下。
然后,点击“退出编辑”,回到“运行界面”的界面。再点击“导出”,保存为.exe格式即可。

最后,整个运行程序是会保存在一个叫“Public Release”的文件夹中,点击里面的.exe文件进行运行。
更新时间
- 2024.08.06:创建。
相关文章:
记录|MVS和VM软件使用记录
目录 前言一、常用属性二、触发模式选择三、操作注意点四、录像、抓拍功能五、VM软件六、VM软件界面介绍七、VM软件运行间隔八、VM软件图像源九、VM软件相机管理十、获取图像十一、方案存储十一、相机拍摄彩图转换颜色转换快速匹配特征模板:运行参数 十二、位置修正…...

算法通关:014_1:用栈实现队列
文章目录 题目总结代码运行结果 题目 用栈实现队列 leetcode :232 总结 时间复杂度 平均下来每个方式是O(1) 代码 class MyQueue {public Stack<Integer> in;public Stack<Integer> out;//初始化public MyQueue() {in new Stack<>();out new Stack<…...

【C#】Random
在 C# 中,Random 类的实例通常用于生成随机数。在方法内部或外部创建 Random 实例主要影响的是实例的生命周期和性能。 在方法外部创建 Random 实例 生命周期:如果在类的成员变量中创建 Random 实例,那么这个实例的生命周期将与类的实例相同…...

MongoDB简介及其在Java中的应用
什么是MongoDB? MongoDB是一个基于分布式文件存储的数据库,由C语言编写。它旨在为Web应用提供可扩展的高性能数据存储解决方案。MongoDB结合了关系数据库和非关系数据库(NoSQL)的特点,是功能最丰富、最像关系数据库的…...

JSON-LD上下文将属性映射到RDF IRIs示例
为了更清晰地说明JSON-LD上下文是如何将属性映射到RDF IRIs,我们可以基于提供的上下文规范,举一个完整的JSON-LD数据实例,并展示它是如何转换为RDF三元组的。 示例上下文 {"context": {"foaf": "http://xmlns.com…...

Spring的监听机制详解
Spring的监听机制详解 讲在前面 对Spring框架,大家都已不陌生,它给我们提供了很多功能,包括IoC、AOP、事务管理等。其中,Spring的事件监听机制是一项非常重要的功能,它允许开发人员定义和处理自定义事件,并…...

Cache结构
Cache cache的一般设计 超标量处理器每周期需要从Cache中同时读取多条指令,同时每周期也可能有多条load/store指令会访问Cache,因此需要多端口的Cache L1 Cache:最靠近处理器,是流水线的一部分,包含两个物理存在 指…...

国产版Sora复现——智谱AI开源CogVideoX-2b 本地部署复现实践教程
目录 一、CogVideoX简介二、CogVideoX部署实践流程2.1、创建丹摩实例2.2、配置环境和依赖2.3、上传模型与配置文件2.4、开始运行 最后 一、CogVideoX简介 智谱AI在8月6日宣布了一个令人兴奋的消息:他们将开源视频生成模型CogVideoX。目前,其提示词上限为…...

怎么读取FRM、MYD、MYI数据文件
一、介绍frm、MYD、MYI文件 在MySQL中,使用MyISAM存储引擎时,数据库表会被分割成几个不同的文件文件描述功能扩展名FRM 文件表结构定义文件存储表的结构信息,字段、索引等.FRMMYD 文件数据文件包含表的实际数据.MYD(MYData&#x…...

Leetcode3226. 使两个整数相等的位更改次数
Every day a Leetcode 题目来源:3226. 使两个整数相等的位更改次数 解法1:位运算 从集合的角度理解,k 必须是 n 的子集。如果不是,返回 −1。怎么用位运算判断,见上面的文章链接。 如果 k 是 n 的子集,…...

Linux笔记-3()
目录 一、Linuⅸ实操篇-定时任务调度 二、Linuⅸ实操篇-Linuⅸ磁盘分区、挂载 三、Linux实操篇-网络配置 一、Linuⅸ实操篇-定时任务调度 1 crond任务调度---crontab进行定时任务的设置1.1 概述任务调度:是指系统在某个时间执行的特定的命令或程序。任务调度分类…...
Apache漏洞复现CVE-2021-41773
Apache HTTP Server 路径穿越漏洞 漏洞简介 该漏洞是由于Apache HTTP Server 2.4.49版本存在目录穿越漏洞,在路径穿越目录 <Directory/>Require all granted</Directory>允许被访问的的情况下(默认开启),攻击者可利用该路径穿越…...

GIT如何将远程指定分支的指定提交拉回到本地分支
一、当前我的代码在这个提交,但可以看到远程仓库上面还有两次新的提交 二、现在我想让我本次的代码更新到最上面这个最新的提交 三、输入git fetch命令获取远程分支的最新提交信息。 四、输入 git log origin/<remote_branch_name>查看并找到想要更新的指定提…...
鸿蒙图形开发【3D引擎接口示例】
介绍 本实例主要介绍3D引擎提供的接口功能。提供了ohos.graphics.scene中接口的功能演示。 3D引擎渲染的画面会被显示在Component3D这一控件中。点击按钮触发不同的功能,用户可以观察渲染画面的改变。 效果预览 使用说明 在主界面,可以点击按钮进入不…...

C#实现数据采集系统-系统优化服务封装
系统优化-服务封装 现在我们调用modbustcp和mqtt都直接在Program,所有加载和功能都混合在一起,比较难以维护 类似asp.net core项目的Program.cs代码如下,构建服务配置和启动 要实现的效果,Main方法中就是一个服务启动,只需要几行代码 分析代码 这里分成两部分,一…...

数据结构与算法--栈、队列篇
一、计算机领域的地位 在计算机科学的广袤领域中,数据结构犹如一座精巧的大厦,为信息的存储和处理提供了坚实的框架。而在众多的数据结构中,栈和队列宛如两颗璀璨的明珠,各自闪耀着独特的光芒。 栈和队列虽然看似简单&…...

【程序、游戏、人生】致敬飞逝的3年和新的开始
人,总要向前看。 感谢之前关注的朋友,感谢各位朋友的私信、感谢关心的评论。 不要停下 20年:某银行业务三方开发。 21年:移动内部业务平台开发移动物联网商城开发储备TPL。 22年-至今:手游发行技术综合北漂 经历了行…...

第三届人工智能、人机交互与机器人国际会议
国际人工智能、人机交互和机器人会议是一项年度活动,汇集了来自世界各地的研究人员、从业者和行业专业人士,分享他们在人工智能、人际交互和机器人领域的知识和专业知识。在过去的几十年里,这些领域在计算能力、数据分析和机器学习技术的进步…...

AWS生成式AI项目的全生命周期管理
随着人工智能技术的迅速发展,生成式 AI 已成为当今最具创新性和影响力的领域之一。生成式 AI 能够创建新的内容,如文本、图像、音频等,具有广泛的应用前景,如自然语言处理、计算机视觉、创意设计等。然而,构建一个成功…...

windows go grpc
windows环境安装go grpc 的工具和插件 在Windows环境下,安装Protocol Buffers(proto)和gRPC相关的工具和插件,可以通过以下几个步骤进行 1.安装protoc 在git 仓库下载tag 包 https://github.com/protocolbuffers/protobuf/rele…...

顶级开发团队设计的Harness工程项目源码什么样
顶级开发团队设计的Harness工程项目源码什么样 前言 近期,某顶级 AI Agent]研究团队的一个工业级 Harness 项目源码在开发者社区中引起广泛关注。这个项目是一个基于 TypeScript 的 CLI 形态 AI Coding Agent,其工程规模和架构成熟度令社区印象深刻: “REPL.tsx 单文件 87…...

零代码实战:在钉钉群聊中一键唤醒影刀RPA机器人
1. 为什么要在钉钉群聊里唤醒影刀RPA? 想象一下这个场景:每天早上9点,销售总监在群里数据机器人,5秒后就能收到自动生成的昨日销售报表。这种"聊天即操作"的体验,正是影刀RPA与钉钉联动带来的办公革命。我帮…...

Meta亿元天团首个大模型交卷!余家辉宋飏Jason Wei耗时九个月,一雪Llama前耻
一水 发自 凹非寺量子位 | 公众号 QbitAI再见了,所有的羊驼。亚历山大王带队9个月从零重构Meta所有AI技术栈,在不断的质疑中交出超级智能实验室第一个模型:主打原生多模态的Muse Spark。模型发布后,Meta股价火速拉升约7%ÿ…...

线性回归——工龄与平均工资关系分析
项目实训:工龄与平均工资关系分析 项目实训 1. 实训目的 (1)理解数据分析的过程。 (2)掌握机器学习常用库(NumPy、Pandas、Matplotlib)的使用方法。 (3)掌握使用Sklearn训…...

蓝桥杯双阶乘解答
题目:代码:import java.math.BigInteger;import java.util.Scanner;// 1:无需package// 2: 类名必须Main, 不可修改public class Main {public static void main(String[] args) {Scanner scan new Scanner(System.in);//在此输入您的代码...BigInteger…...

SDMatte模型微调实战:使用自定义数据集优化特定场景抠图
SDMatte模型微调实战:使用自定义数据集优化特定场景抠图 1. 为什么需要微调SDMatte模型 SDMatte作为开源的图像抠图模型,在通用场景下表现已经相当不错。但当我们面对特定领域的图像时,比如医疗影像中的器官分割、卫星图片中的地物提取&…...
)
PHP Swoole配置全栈实战(生产环境零故障配置手册)
第一章:PHP Swoole配置全栈实战(生产环境零故障配置手册)在高并发、低延迟的现代 Web 服务架构中,Swoole 已成为 PHP 生产环境的核心运行时引擎。本章聚焦于可落地、可监控、可回滚的全栈配置实践,覆盖从内核参数调优到…...

你用真金白银买股票,钱到底被谁赚走了? 所谓的“市值蒸发“,只是把那些本来就不存在的、基于预期的信用货币,给抹掉了而已
你用真金白银买股票,钱到底被谁赚走了? 目录 你用真金白银买股票,钱到底被谁赚走了? 一、先讲一个100万变100亿的完整故事 第一步:公司成立(第0年) 第二步:天使轮融资(第1年) 第三步:A轮融资(第2年) 第四步:B轮融资(第3年) 第五步:IPO上市(第4年) 第六步:…...

OpenClaw自动化调研:Qwen2.5-VL-7B全网信息收集与分析
OpenClaw自动化调研:Qwen2.5-VL-7B全网信息收集与分析 1. 为什么需要自动化调研工具 作为一个经常需要收集行业动态的技术博主,我过去每天要花2-3小时手动浏览各类网站。直到发现OpenClaw这个能操控浏览器的AI助手,配合Qwen2.5-VL-7B的多模…...

SQL中如何使用窗口函数实现Top N推荐系统
用 ROW_NUMBER() 配合 PARTITION BY user_id 获取每个用户的 Top N 推荐最稳妥,RANK() 和 DENSE_RANK() 因处理重复分数会导致条数不可控,如并列第1时 RANK() 跳至第3,易使 WHERE rn ≤ N 漏取或超取。窗口函数怎么写才能拿到每个用户的Top N…...