鸿蒙(API 12 Beta3版)【时域可分层视频编码】 音视频编码
基础概念
时域可分层视频编码介绍
可分层视频编码,又叫可分级视频编码、可伸缩视频编码,是视频编码的扩展标准,目前常用的包含SVC(H.264编码标准采用的可伸缩扩展)和SHVC(H.265编码标准采用的可扩展标准)。
其特点是能一次编码出时域分层、空域分层、质量域分层的码流结构,满足因网络、终端能力和用户需求不同带来的的差异化需求。
时域可分层视频编码, 是指能编码出时域分层码流的视频编码,下图是通过参考关系构建的4层时域分层码流结构。

从高到低逐层丢弃部分层级的码流(丢弃顺序L3->L2->L1),能实现不同程度的帧率伸缩,以满足传输和解码能力的变化需求。
如下图所示,是上述4层时域分层码流结构丢弃L3后组成的新的码流结构,能在解码正常的情况下实现帧率减半的效果。其他层的丢弃同理。

时域分层码流结构介绍
基础码流是由一个或多个独立图像组(Group Of Pictures,简称GOP)组合而成的。GOP是在编码中一组从I帧开始到I帧结束的连续的可独立解码的图像组。
时域分层码流可以在GOP内继续细分为独立的一个或多个时域图像组(Temporal Group Of Pictures, 简称TGOP),每一个TGOP由一个基本层和后续的一个或多个增强层组合而成,如上述4层时域分层码流结构中的帧0到帧7是一个TGOP。
- 基本层(Base Layer, 简称BL): 是GOP中的最底层(L0)。在时域分层中,该层用最低帧率进行编码。
- 增强层(Enhance Layer简称EL): 是BL之上的层级,由低到高可以分为多层(L1,L2,L3)。在时域分层中,最低层的EL依据BL获得的编码信息,进一步编码帧率更高的层级,更高层的EL会依据BL或低层EL,来编码比低层更高帧率的视频。
如何实现时域分层码流结构
时域分层码流结构的实现是依靠参考关系逐帧指定实现的,参考帧按在解码图像缓存区(Decoded Picture Buffer,简称DPB)驻留的时长分为短期参考帧和长期参考帧。
- 短期参考帧(Short-Term Reference,简称STR): 是不能长期驻留在DPB中的参考帧,更新方式是先进先出,如果DPB满,旧的短期参考帧会被移出DPB。
- 长期参考帧(Long-Term Reference,简称LTR): 是能长期驻留在DPB中的参考帧,通过标记替换的方式更新,不主动标记替换就不会更新。
虽然STR个数大于1时,也能实现一定的跨帧参考结构,但受限于存在时效过短,时域分层结构支持的跨度有限。LTR则不存在上述问题,也能覆盖短期参考帧跨帧场景。优选使用LTR实现时域分层码流结构。
适用场景
基于上述描述的时域分层编码特点,推荐以下场景使用:
- 场景1:播放侧无缓存或低缓存的实时编码传输场景,例如视频会议、视频直播、协同办公等。
- 场景2:有视频预览播放或倍速播放需求的视频编码录制场景。
若开发场景不涉及动态调整时域参考结构,且分层结构简单,则推荐使用[全局时域可分层特性],否则使能[长期参考帧特性]。
约束和限制
-
不可以混用全局时域可分层特性和长期参考帧特性。
由于底层实现归一,全局时域可分层特性和长期参考帧特性不能同时开启。
-
叠加强制IDR配置时,请使用随帧通路配置。
参考帧仅在GOP内有效,刷新I帧后,DPB随之清空,参考帧也会被清空,因此参考关系的指定受I帧刷新位置影响很大。
使能时域分层能力后,若需要通过OH_MD_KEY_REQUEST_I_FRAME临时请求I帧,应使用生效时机确定的随帧通路配置方式准确告知框架I帧刷新位置以避免参考关系错乱,参考随帧通路配置相关指导,避免使用生效时机不确定的OH_VideoEncoder_SetParameter方式。
-
支持OH_AVBuffer回调通路,不支持OH_AVMemory回调通路。
新特性依赖随帧特性,应避免使用OH_AVMemory回调OH_AVCodecAsyncCallback,应使用OH_AVBuffer回调OH_AVCodecCallback。
-
支持时域P分层,不支持时域B分层。
时域可分层编码按分层帧类型分为基于P帧的时域分层和基于B帧的时域编码,当前支持分层P编码,不支持分层B编码。
全局时域可分层特性(Feature_Temporal_Scalability)
接口介绍
全局时域可层特性,适用于编码稳定和简单的时域分层结构,初始配置,全局生效,不支持动态修改。开发配置参数如下:
| 配置参数 | 语义 |
|---|---|
| OH_MD_KEY_VIDEO_ENCODER_ENABLE_TEMPORAL_SCALABILITY | 全局时域分层编码使能参数 |
| OH_MD_KEY_VIDEO_ENCODER_TEMPORAL_GOP_SIZE | 全局时域分层编码TGOP大小参数 |
| OH_MD_KEY_VIDEO_ENCODER_TEMPORAL_GOP_REFERENCE_MODE | 全局时域分层编码TGOP参考模式 |
- 全局时域分层编码使能参数: 在配置阶段配置,仅特性支持才会真正使能成功。
- 全局时域分层编码TGOP大小参数: 可选配置,影响时域关键帧之间的间隔,用户需要基于自身业务场景下抽帧需求自定义关键帧密度,可在[2, GopSize)范围内配置,若不配置则使用默认值
- 全局时域分层编码TGOP参考模式参数: 可选配置,影响非关键帧参考模式。包括相邻参考ADJACENT_REFERENCE和跨帧参考JUMP_REFERENCE。相邻参考相对跨帧参考拥有更好的压缩性能,跨帧参考相对相邻参考拥有更好的丢帧自由度,如不配置则使用默认值。
使用举例1:TGOP=4,相邻参考模式

使用举例2:TGOP=4,跨帧参考模式

开发指导
基础编码流程请参考[视频编码开发指导],下面仅针与基础视频编码过程中存在的区别做具体说明。
- 在初始阶段创建编码实例时,校验当前视频编码器是否支持全局时域可分层特性。
// 1.1 获取对应视频编码器能力句柄,此处以H.264为例
OH_AVCapability *cap = OH_AVCodec_GetCapability(OH_AVCODEC_MIMETYPE_VIDEO_AVC, true);
// 1.2 通过特性能力查询接口校验是否支持全局时域可分层特性
bool isSupported = OH_AVCapability_isFeatureSupported(cap, VIDEO_ENCODER_TEMPORAL_SCALABILITY);
若支持,则可以使能全局时域可分层特性。
- 在配置阶段,配置全局时域分层编码特性参数。
constexpr int32_t TGOP_SIZE = 3;
// 2.1 创建配置用临时AVFormat
OH_AVFormat *format = OH_AVFormat_Create();
// 2.2 填充使能参数键值对
OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_ENABLE_TEMPORAL_SCALABILITY, 1);
// 2.3 (可选)填充TGOP大小和TGOP内参考模式键值对
OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_TEMPORAL_GOP_SIZE, TGOP_SIZE);
OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_TEMPORAL_GOP_REFERENCE_MODE, ADJACENT_REFERENCE);
// 2.4 参数配置
int32_t ret = OH_VideoEncoder_Configure(videoEnc, format);
if (ret != AV_ERR_OK) {// 异常处理
}
// 2.5 配置完成后销毁临时AVFormat
OH_AVFormat_Destroy(format);
-
(可选)在运行阶段输出轮转中,获取码流对应时域层级信息。
开发者可基于已配置的TGOP参数,按编码出帧数目周期性获取。
通过配置周期获取示例代码如下:
uint32_t outPoc = 0;
// 通过输出回调中有效帧数,获取TGOP内相对位置,对照配置确认层级
static void OnNewOutputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData)
{// 注:若涉及复杂处理流程,建议相关struct OH_AVCodecBufferAttr attr;(void)buffer->GetBufferAttr(attr);// 刷新I帧后poc归零if (attr.flags & AVCODEC_BUFFER_FLAG_KEY_FRAME) {outPoc = 0;}// 没有帧码流只有XPS的输出需要跳过if (attr.flags != AVCODEC_BUFFER_FLAG_CODEC_DATA) {int32_t tGopInner = outPoc % TGOP_SIZE;if (tGopInner == 0) {// 时域关键帧,后续传输、解码流程不可丢弃} else {// 时域非关键帧,后续传输、解码流程可以丢弃}outPoc++;}
}
-
(可选)在运行阶段输出轮转中,使用步骤3获取的时域层级信息,自适应传输或自适应解码。
基于获取的时域可分层码流和对应的层级信息,开发者可选择需要的层级进行传输,或携带至对端自适应选帧解码。
长期参考帧特性(Feature_Long-Term_Reference)
接口介绍
长期参考帧特性提供帧级灵活的参考关系配置。适用于灵活和复杂的时域分层结构。
| 配置参数 | 语义 |
|---|---|
| OH_MD_KEY_VIDEO_ENCODER_LTR_FRAME_COUNT | 长期参考帧个数参数 |
| OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_MARK_LTR | 当前帧标记为LTR帧 |
| OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_USE_LTR | 当前帧参考的LTR帧号 |
- 长期参考帧个数参数: 在配置阶段配置,应小于等于查询到的最大支持数目,查询方式详见开发指导。
- 当前帧标记为LTR帧: BL层标记为LTR,被跳跃参考的EL层也标记为LTR。
- 当前帧参考的LTR帧号: 如当前帧需要跳跃参考前面已被标记为LTR的帧号。
使用举例,实现[时域可分层视频编码介绍]中的4层时域分层结构的配置如下:
-
在配置阶段,将OH_MD_KEY_VIDEO_ENCODER_LTR_FRAME_COUNT 配置为5。
-
在运行阶段输入轮转中,按如下表所示随帧配置LTR相关参数,下表中\表示不做配置。
配置\POC 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 MARK_LTR 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 USE_LTR \ \ 0 \ 0 \ 4 \ 0 \ 8 \ 8 \ 12 0 8
开发指导
基础编码流程请参考[视频编码开发指导],下面仅针与基础视频编码过程中存在的区别做具体说明。
- 在初始阶段创建编码实例时,校验当前视频编码器是否支持LTR特性。
constexpr int32_t NEEDED_LTR_COUNT = 5;
bool isSupported = false;
int32_t supportedLTRCount = 0;
// 1.1 获取对应编码器能力句柄,此处以H.264为例
OH_AVCapability *cap = OH_AVCodec_GetCapability(OH_AVCODEC_MIMETYPE_VIDEO_AVC, true);
// 1.2 通过特性能力查询接口校验是否支持LTR特性
isSupported = OH_AVCapability_isFeatureSupported(cap, VIDEO_ENCODER_LONG_TERM_REFERENCE);
// 1.3 确定支持的LTR数目
if (isSupported) {OH_AVFormat *properties = OH_AVCapability_GetFeatureProperties(cap, VIDEO_ENCODER_LONG_TERM_REFERENCE);OH_AVFormat_GetIntValue(properties, OH_FEATURE_PROPERTY_KEY_VIDEO_ENCODER_MAX_LTR_FRAME_COUNT, &supportedLTRCount);OH_AVFormat_Destroy(properties);// 1.4 判断LTR是否满足结构需求isSupported = supportedLTRCount >= NEEDED_LTR_COUNT;
}
若支持,且支持的LTR数目满足自身码流结构需求,则可以使能LTR特性。
- 在配置之前注册回调时,注册随帧通路回调。
Buffer输入模式示例:
// 2.1 编码输入回调OH_AVCodecOnNeedInputBuffer实现
static void OnNeedInputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData)
{// 输入帧buffer对应的index,送入InIndexQueue队列// 输入帧的数据buffer送入InBufferQueue队列// 数据处理,请参考:// - 写入编码码流// - 通知编码器码流结束// - 随帧参数写入OH_AVFormat *format = OH_AVBuffer_GetParameter(buffer);OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_MARK_LTR, 1);OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_USE_LTR, 4);OH_AVBuffer_SetParameter(buffer, format);// 通知编码器buffer输入完成OH_VideoEncoder_PushInputBuffer(codec, index);
}// 2.2 编码输出回调OH_AVCodecOnNewOutputBuffer实现
static void OnNewOutputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData)
{// 完成帧buffer对应的index,送入outIndexQueue队列// 完成帧的数据buffer送入outBufferQueue队列// 数据处理,请参考:// - 释放编码帧// - 记录POC和LTR生效情况
}// 2.3 注册数据回调
OH_AVCodecCallback cb;
cb.onNeedInputBuffer = OnNeedInputBuffer;
cb.onNewOutputBuffer = OnNewOutputBuffer;
OH_VideoEncoder_RegisterCallback(codec, cb, nullptr);
Surface输入模式示例:
// 2.1 编码输入参数回调OH_VideoEncoder_OnNeedInputParameter实现
static void OnNeedInputParameter(OH_AVCodec *codec, uint32_t index, OH_AVFormat *parameter, void *userData)
{// 输入帧buffer对应的index,送入InIndexQueue队列// 输入帧的数据avformat送入InFormatQueue队列// 数据处理,请参考:// - 写入编码码流// - 通知编码器码流结束// - 随帧参数写入OH_AVFormat_SetIntValue(parameter, OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_MARK_LTR, 1);OH_AVFormat_SetIntValue(parameter, OH_MD_KEY_VIDEO_ENCODER_PER_FRAME_USE_LTR, 4);// 通知编码器随帧参数配置输入完成OH_VideoEncoder_PushInputParameter(codec, index);
}// 2.2 编码输出回调OH_AVCodecOnNewOutputBuffer实现
static void OnNewOutputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData)
{// 完成帧buffer对应的index,送入outIndexQueue队列// 完成帧的数据buffer送入outBufferQueue队列// 数据处理,请参考:// - 释放编码帧// - 记录POC和LTR生效情况
}// 2.3 注册数据回调
OH_AVCodecCallback cb;
cb.onNewOutputBuffer = OnNewOutputBuffer;
OH_VideoEncoder_RegisterCallback(codec, cb, nullptr);
// 2.4 注册随帧参数回调
OH_VideoEncoder_OnNeedInputParameter inParaCb = OnNeedInputParameter;
OH_VideoEncoder_RegisterParameterCallback(codec, inParaCb, nullptr);
- 在配置阶段,配置同时存在LTR最大数目。
constexpr int32_t TGOP_SIZE = 3;
// 3.1 创建配置用临时AVFormat
OH_AVFormat *format = OH_AVFormat_Create();
// 3.2 填充使能LTR个数键值对
OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODER_LTR_FRAME_COUNT, NEEDED_LTR_COUNT);
// 3.3 参数配置
int32_t ret = OH_VideoEncoder_Configure(videoEnc, format);
if (ret != AV_ERR_OK) {// 异常处理
}
// 3.4 配置完成后销毁临时AVFormat
OH_AVFormat_Destroy(format);
-
(可选)在运行阶段输出轮转中,获取码流对应时域层级信息。
同全局时域分层特性。
因在输入轮转有配置LTR参数,也可在输入轮转中中记录,输出轮转中找到对应的输入参数。
-
(可选)在运行阶段输出轮转中,使用步骤4获取的时域层级信息,自适应传输或自适应解码。
同全局时域分层特性。
最后呢
很多开发朋友不知道需要学习那些鸿蒙技术?鸿蒙开发岗位需要掌握那些核心技术点?为此鸿蒙的开发学习必须要系统性的进行。
而网上有关鸿蒙的开发资料非常的少,假如你想学好鸿蒙的应用开发与系统底层开发。你可以参考这份资料,少走很多弯路,节省没必要的麻烦。由两位前阿里高级研发工程师联合打造的《鸿蒙NEXT星河版OpenHarmony开发文档》里面内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(Harmony NEXT)技术知识点
如果你是一名Android、Java、前端等等开发人员,想要转入鸿蒙方向发展。可以直接领取这份资料辅助你的学习。下面是鸿蒙开发的学习路线图。

针对鸿蒙成长路线打造的鸿蒙学习文档。话不多说,我们直接看详细鸿蒙(OpenHarmony )手册(共计1236页)与鸿蒙(OpenHarmony )开发入门视频,帮助大家在技术的道路上更进一步。
- 《鸿蒙 (OpenHarmony)开发学习视频》
- 《鸿蒙生态应用开发V2.0白皮书》
- 《鸿蒙 (OpenHarmony)开发基础到实战手册》
- OpenHarmony北向、南向开发环境搭建
- 《鸿蒙开发基础》
- 《鸿蒙开发进阶》
- 《鸿蒙开发实战》

总结
鸿蒙—作为国家主力推送的国产操作系统。部分的高校已经取消了安卓课程,从而开设鸿蒙课程;企业纷纷跟进启动了鸿蒙研发。
并且鸿蒙是完全具备无与伦比的机遇和潜力的;预计到年底将有 5,000 款的应用完成原生鸿蒙开发,未来将会支持 50 万款的应用。那么这么多的应用需要开发,也就意味着需要有更多的鸿蒙人才。鸿蒙开发工程师也将会迎来爆发式的增长,学习鸿蒙势在必行! 自↓↓↓拿
相关文章:
鸿蒙(API 12 Beta3版)【时域可分层视频编码】 音视频编码
基础概念 时域可分层视频编码介绍 可分层视频编码,又叫可分级视频编码、可伸缩视频编码,是视频编码的扩展标准,目前常用的包含SVC(H.264编码标准采用的可伸缩扩展)和SHVC(H.265编码标准采用的可扩展标准&…...

一个java类实现UDP代理转发
概述 实现一个UDP代理服务器,它监听一个指定的端口,将接收到的UDP数据包转发到目标主机,并将目标主机的响应转发回原始客户端。使用线程池来异步处理响应,并使用日志记录器来记录不同级别的日志信息。 源代码 import java.io.I…...

K8s问题案例分析
1.worker节点宕机,请说明一下pod的驱逐流程: k8s有一个节点控制器,节点控制器在一段时间内无法和kubelet通信,那么就会给节点打上unknown 状态,并自动创建NoExecute污点,避免调度器调度新的pod到该节点。同时已经在这…...

爬虫集群部署:Gerapy 框架详细解析
🚀 爬虫集群部署:Gerapy 框架详细解析 🛠️ Gerapy 环境搭建 Gerapy 是一个基于 Scrapy 的爬虫框架,专注于爬虫项目的管理和集群部署。下面将详细介绍如何搭建 Gerapy 环境,并进行初步配置。 Gerapy 环境搭建: 安装 …...

文本相似度 HanPL汉语言处理
文章目录 前言需求简介实操开始1. 添加pom.xml依赖2. 文本相似度工具类3. 案例验证4. 验证结果 总结 前言 请各大网友尊重本人原创知识分享,谨记本人博客:南国以南i、 提示:以下是本篇文章正文内容,下面案例可供参考 需求 当我…...

Linux软件包管理器 yum
目录 0.前言 1.什么是软件包 2.rz和sz 2.1rz命令 2.2sz命令 2.3操作示例 3.安装前注意事项 3.1保证网络畅通 3.2确保权限 3.3配置软件仓库 3.4 检查系统更新 4.查看软件包 5.安装软件 5.1作为root用户安装软件 5.2作为非root用户安装软件 5.3注意事项 6.卸载软件 6.1使用yum卸载…...
图像变换算法
1.1 傅里叶变换 (Fourier Transform) 介绍 傅里叶变换是一种数学变换,用于将图像从空间域转换到频率域。它广泛应用于图像去噪和滤波。 原理 傅里叶变换将图像表示为频率成分的叠加,使得频率成分可以独立处理。通过对频率成分的分析和处理࿰…...

谷粒商城实战笔记-131~132-商城业务-商品上架-构造sku检索属性和库存查询
文章目录 一,131-商城业务-商品上架-构造sku检索属性1,开发目标2,详细设计2.1,根据spu_id获取所有的规格参数2.2,根据上一步中查询结果进一步确认是否可搜索2.3,将可搜索的属性封装到Java模型中 二…...

【Python学习-UI界面】PyQt5 QLabel小部件
序号组件说明详细介绍链接1QLabel用作占位符,用于显示不可编辑的文本、图像,或者动画GIF的电影。它也可以用作其他小部件的助记符键。2QLineEdit是最常用的输入字段。它提供了一个框,可以输入一行文本。要输入多行文本,需要使用QT…...

vue项目打包问题
缓存导致打包后js文件404 修改vue.config.js打包输出文件名为动态,例如取当前时间戳。 在index.html文件添加meta标签设置不缓存。 更新完包,假如用户此刻正访问某一个页面时,访问的包还是原来的情况导致出现bug 解决VUE项目更新后需要客户手…...
|容器|vector| queue|)
C++标准模板库(STL)|容器|vector| queue|
对STL进行总结,STL是standard template library的简写,是C中的一个标准模板库,用于实现常用的数据结构和算法,它是C程序员经常使用的一个工具箱。STL 的主要目的是提高开发效率和代码质量,使得程序员可以更加便捷地完成…...
【Android】安卓四大组件之Service用法
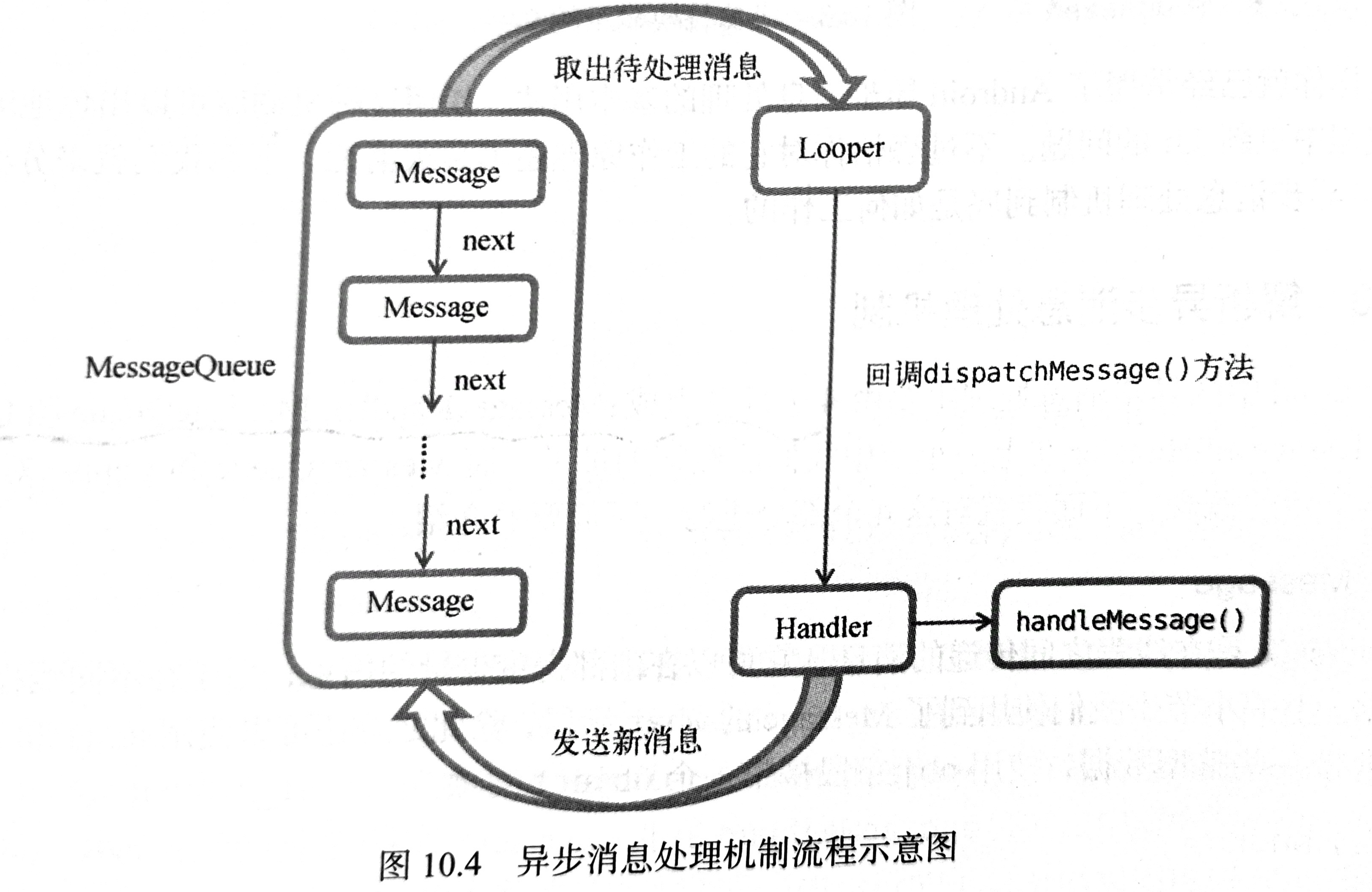
文章目录 使用Handler更新UIService基本特点启动方式非绑定式服务使用步骤 绑定式服务步骤 生命周期非绑定式启动阶段结束阶段 绑定式启动阶段结束阶段 前台Service使用步骤结束结束Service本身降级为普通Service降级为普通Service 使用Handler更新UI 主线程创建Handler对象&a…...

Python爬虫入门实战(详细步骤)
1. 技术选型 爬虫这个功能,我个人理解是什么语言都能写的,只要能正常发送 HTTP 请求,将响应回来的静态页面模版 HTML 上把我们所需要的数据提取出来就可以了,原理很简单,这个东西当然可以手动去统计收集,但…...

5、Linux : 网络相关
OSI七层网络模型 TCP/IP四层 概念模型 对应网络协议 应用层(Application) HTTP、TFTP, FTP, NFS, WAIS、 表示层(Presentation) 应用层 Telnet, Rlogin, SNMP, Gopher 会话层(Session) SMTP…...

Linux中针对文件权限的解析
1.文件权限详细解析: -rw-r--r--. 1 root root 114 4月 10 16:32 100.txt 1)-rw-r--r--. 总共11位 第一个“-”和最后一个“.”不用去管,剩下 rw- r-- r-- 属主 属组 其他人 u g o 第一个是“-”表示普通文件 第一个是“d”表示文件目录 …...

【0304】psql 执行“VACUUM FULL”命令的背后实现过程
1. 概述 在前面讲解Postgres内核中解析器相关(【0297】Postgres内核之 INSERT INTO 原始解析树 转 Query 树 (1))内容时,曾提到过,Postgres内核大致将用户下发的SQL语句分为三大类,这里的VACUUM FULL属于CMD_UTILITY; 因此直接调用utility.c(实用程序)中的对应函数。…...

Java常见面试题-11-MongoDb
文章目录 MongoDB 是什么?MongoDB 和关系型数据库 mysql 区别MongoDB 有 3 个数据库分别是什么?MongoDB 中的数据类型MongoDB 适用业务场景 MongoDB 是什么? mongodb 是属于文档型的非关系型数据库,是开源、高性能、高可用、可扩…...

PBLOCK
PBLOCK是附加到Vivado中分配给Pblocks的单元格的只读属性 设计套房。 Pblock是一组单元格,以及一个或多个指定 Pblock所包含的设备资源。在平面规划过程中使用了Pblocks 将其放置到组相关逻辑中,并将其分配到目标设备的某个区域。请参阅 Vivado设计套件用…...

电子纸打造智能、自动化、绿色的工作流程
电子纸打造智能、自动化、绿色的工作流程 RFID技术最早在1940年代问世,1980年开始商业化使用。直到现在RFID(无线射频识别)技术已经深入到我们生活的方方面面。特别是在工业生产、物流运输等领域,RFID技术发挥着越来越重要的作用…...

Redis 的6种回收策略(淘汰策略)详解
Redis 的6种回收策略(淘汰策略)详解 1、Redis的六种淘汰策略1. volatile-lru2. volatile-ttl3. volatile-random4. allkeys-lru5. allkeys-random6. no-eviction 2、使用策略规则 💖The Begin💖点点关注,收藏不迷路&am…...

YOLOv11 OBB实战:手把手构建旋转目标检测数据集
1. 为什么需要旋转目标检测? 在传统的目标检测任务中,我们通常使用水平矩形框(HBB)来标注物体。这种标注方式简单直接,但对于某些特定场景下的物体检测效果并不理想。比如在遥感图像中,飞机、船只等物体往往…...

2026最权威的十大AI论文工具推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 当今,人工智能技术于学术写作范畴的运用愈发广泛,该技术的关键价值在…...
存储加速与数据卸载)
DPU应用场景系列(二)存储加速与数据卸载
1. 为什么存储需要DPU加速? 想象一下你正在用手机拍摄4K视频,每秒钟产生的数据量相当于几百张高清照片。现在把这个场景放大到数据中心——成千上万的服务器每天要处理数PB级别的数据(1PB100万GB),传统的存储架构就像用…...

WebDataset与低代码平台:简化深度学习数据处理流程
WebDataset与低代码平台:简化深度学习数据处理流程 【免费下载链接】webdataset A high-performance Python-based I/O system for large (and small) deep learning problems, with strong support for PyTorch. 项目地址: https://gitcode.com/gh_mirrors/we/we…...

从Python入门到AI项目实战:以NLP-StructBERT部署为第一个完整案例
从Python入门到AI项目实战:以NLP-StructBERT部署为第一个完整案例 你是不是刚学Python,对着书本上的print(“Hello World”)感觉有点无聊?或者学了一堆语法,却不知道这些for循环、if判断到底能用来做什么实际的东西? …...

从硬件差异到数据兼容:速腾RS与Velodyne雷达的‘intensity‘字段深度解析
从硬件差异到数据兼容:速腾RS与Velodyne雷达的intensity字段深度解析 激光雷达作为自动驾驶和机器人感知的核心传感器,其数据格式的标准化程度直接影响算法开发的效率。速腾(RoboSense)与Velodyne作为两大主流厂商,硬件…...

LFM2.5-1.2B-Thinking在Ollama上的真实体验:生成速度、内容质量实测
LFM2.5-1.2B-Thinking在Ollama上的真实体验:生成速度、内容质量实测 1. 模型初体验与部署 1.1 第一印象:轻量但强大 当我第一次在Ollama上看到LFM2.5-1.2B-Thinking这个模型时,最吸引我的是它"小身材大能量"的特点。作为一个仅有…...

2025届毕业生推荐的五大AI科研工具推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 为能切实有效地把知网针对于人工智能创作出来的内容之检测概率降低下来,给出如下…...

Phi-3-mini-128k-instruct效果展示:128K上下文下跨段落事实一致性问答实例
Phi-3-mini-128k-instruct效果展示:128K上下文下跨段落事实一致性问答实例 1. 模型简介 Phi-3-Mini-128K-Instruct 是一个38亿参数的轻量级开放模型,属于Phi-3系列的最新成员。这个模型最引人注目的特点是它支持长达128K token的上下文窗口,…...

从“技术迷宫“到“一键导航“:OpCore-Simplify如何让黑苹果配置变得像搭积木一样简单
从"技术迷宫"到"一键导航":OpCore-Simplify如何让黑苹果配置变得像搭积木一样简单 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-S…...