点云规则格网化,且保存原始的点云索引
点云规则格网化,且保存原始的点云索引
点云深度学习Voxelize规则,参考PTV2:https://github.com/Gofinge/PointTransformerV2
1总执行文件
import numpy as np
import torch
from pcr.utils.registry import Registry
TRANSFORMS = Registry("transforms")
@TRANSFORMS.register_module()
class Voxelize(object):def __init__(self,voxel_size=0.05,hash_type="fnv",mode='train',keys=("coord", "normal", "color", "label"),return_inverse=False,return_discrete_coord=False,return_min_coord=False):self.voxel_size = voxel_sizeself.hash = self.fnv_hash_vec if hash_type == "fnv" else self.ravel_hash_vecassert mode in ["train", "test"]self.mode = modeself.keys = keysself.return_inverse = return_inverseself.return_discrete_coord = return_discrete_coordself.return_min_coord = return_min_coorddef __call__(self, data_dict):assert "coord" in data_dict.keys()discrete_coord = np.floor(data_dict["coord"] / np.array(self.voxel_size)).astype(np.int)min_coord = discrete_coord.min(0) * np.array(self.voxel_size)discrete_coord -= discrete_coord.min(0)key = self.hash(discrete_coord)idx_sort = np.argsort(key)key_sort = key[idx_sort]_, inverse, count = np.unique(key_sort, return_inverse=True, return_counts=True)if self.mode == 'train': # train modeidx_select = np.cumsum(np.insert(count, 0, 0)[0:-1]) + np.random.randint(0, count.max(), count.size) % countidx_unique = idx_sort[idx_select]if self.return_discrete_coord:data_dict["discrete_coord"] = discrete_coord[idx_unique]if self.return_inverse:data_dict["mask"] = np.zeros_like(inverse)data_dict["mask"][idx_unique] = 1data_dict["inverse"] = np.zeros_like(inverse)data_dict["inverse"][idx_sort] = inversedata_dict["length"] = np.array(inverse.shape)if self.return_min_coord:data_dict["min_coord"] = min_coord.reshape([1, 3])for key in self.keys:data_dict[key] = data_dict[key][idx_unique]# print('data_dict["discrete_coord"].shape',data_dict["discrete_coord"].shape,' ',data_dict[key].shape)return data_dictelif self.mode == 'test': # test modedata_part_list = []for i in range(count.max()):temp=np.insert(count, 0, 0)temp2=temp[0: -1]temp3= np.cumsum(temp2)temp4 = np.cumsum(temp2)+i % countidx_select = np.cumsum(np.insert(count, 0, 0)[0:-1]) + i % countidx_part = idx_sort[idx_select]data_part = dict(index=idx_part)# TODO to be more robustfor key in self.keys:data_part[key] = data_dict[key][idx_part]if self.return_discrete_coord:data_part["discrete_coord"] = discrete_coord[idx_part]if self.return_inverse:data_part["inverse"] = np.zeros_like(inverse)data_part["inverse"][idx_sort] = inversedata_part["length"] = np.array(inverse.shape)if self.return_min_coord:data_part["min_coord"] = min_coord.reshape([1, 3])data_part_list.append(data_part)return data_part_listelse:raise NotImplementedError@staticmethoddef ravel_hash_vec(arr):"""Ravel the coordinates after subtracting the min coordinates."""assert arr.ndim == 2arr = arr.copy()arr -= arr.min(0)arr = arr.astype(np.uint64, copy=False)arr_max = arr.max(0).astype(np.uint64) + 1keys = np.zeros(arr.shape[0], dtype=np.uint64)# Fortran style indexingfor j in range(arr.shape[1] - 1):keys += arr[:, j]keys *= arr_max[j + 1]keys += arr[:, -1]return keys@staticmethoddef fnv_hash_vec(arr):"""FNV64-1A"""assert arr.ndim == 2# Floor first for negative coordinatesarr = arr.copy()arr = arr.astype(np.uint64, copy=False)hashed_arr = np.uint64(14695981039346656037) * np.ones(arr.shape[0], dtype=np.uint64)for j in range(arr.shape[1]):hashed_arr *= np.uint64(1099511628211)hashed_arr = np.bitwise_xor(hashed_arr, arr[:, j])return hashed_arr
class Compose(object):def __init__(self, cfg=None):self.cfg = cfg if cfg is not None else []self.transforms = []for t_cfg in self.cfg:self.transforms.append(TRANSFORMS.build(t_cfg))def __call__(self, data_dict):for t in self.transforms:data_dict = t(data_dict)return data_dictdata2 = torch.load('/media/1.pth')
Voxelize()
transform = Compose([dict(type="Voxelize", voxel_size=0.5, hash_type='fnv', mode='test',keys=("coord", "color", "semantic_gt"), return_discrete_coord=True)])
data2['coord']=np.zeros((8,3))
data2['coord'][:,0]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
data2['coord'][:,1]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
data2['coord'][:,2]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
data2_voxelize = transform(data2)
# coord_p, idx_uni = np.random.rand(data["coord"].shape[0]) * 1e-3, np.array([])
# print(idx_uni.size)
for i in range(3):print(data2_voxelize[i]['coord'])
s=1
输入
data2[‘coord’]=np.zeros((8,3))
data2[‘coord’][:,0]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
data2[‘coord’][:,1]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
data2[‘coord’][:,2]=[9,7,1.01,1.02,3,4.01,4.02,4.03]
输出
[[9. 9. 9. ]
[7. 7. 7. ]
[4.01 4.01 4.01]
[3. 3. 3. ]
[1.01 1.01 1.01]]
[[9. 9. 9. ]
[7. 7. 7. ]
[4.02 4.02 4.02]
[3. 3. 3. ]
[1.02 1.02 1.02]]
[[9. 9. 9. ]
[7. 7. 7. ]
[4.03 4.03 4.03]
[3. 3. 3. ]
[1.01 1.01 1.01]]
相关文章:

点云规则格网化,且保存原始的点云索引
点云规则格网化,且保存原始的点云索引 点云深度学习Voxelize规则,参考PTV2:https://github.com/Gofinge/PointTransformerV2 1总执行文件 import numpy as np import torch from pcr.utils.registry import Registry TRANSFORMS Registry…...

入职第一天就被迫离职,找工作多月已读不回,面试拿不到offer我该怎么办?
大多数情况下,测试员的个人技能成长速度,远远大于公司规模或业务的成长速度。所以,跳槽成为了这个行业里最常见的一个词汇。 前言 前几天,我们一个粉丝跟我说,正常入职一家外包,什么都准备好了࿰…...
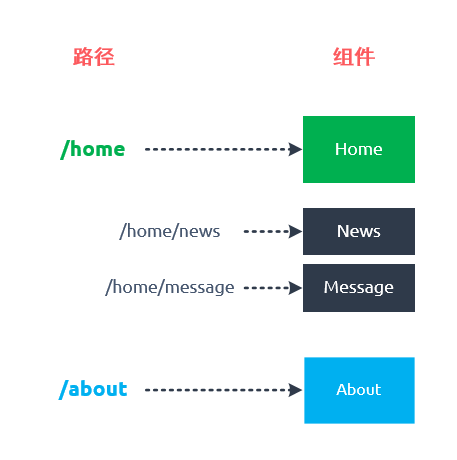
走进Vue【三】vue-router详解
目录🌟前言🌟路由🌟什么是前端路由?🌟前端路由优点缺点🌟vue-router🌟安装🌟路由初体验1.路由组件router-linkrouter-view2.步骤1. 定义路由组件2. 定义路由3. 创建 router 实例4. 挂…...

html+css制作
<!DOCTYPE html> <html><head><meta charset"utf-8"><title>校园官网</title><style type"text/css">*{padding: 0;margin: 0;}#logo{width:30%;float: left;}.nav{width: 100%;height: 100px;background-color…...

Python实现rar、zip和7z文件的压缩和解压
一、7z压缩文件的压缩和解压 1、安装py7zr 我们要先安装py7zr第三方库: pip install py7zr如果python环境有问题,执行上面那一条安装语句老是安装在默认的python环境的话,我们可以执行下面这条语句,将第三方库安装在项目的虚拟…...

从Hive源码解读大数据开发为什么可以脱离SQL、Java、Scala
从Hive源码解读大数据开发为什么可以脱离SQL、Java、Scala 前言 【本文适合有一定计算机基础/半年工作经验的读者食用。立个Flg,愿天下不再有肤浅的SQL Boy】 谈到大数据开发,占据绝大多数人口的就是SQL Boy,不接受反驳,毕竟大…...
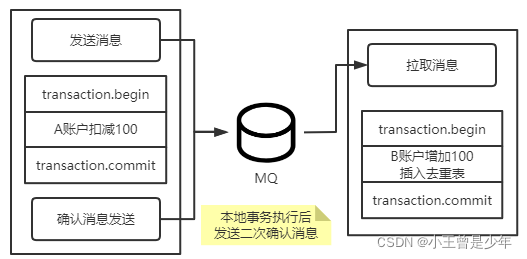
RocketMQ 事务消息 原理及使用方法解析
🍊 Java学习:Java从入门到精通总结 🍊 深入浅出RocketMQ设计思想:深入浅出RocketMQ设计思想 🍊 绝对不一样的职场干货:大厂最佳实践经验指南 📆 最近更新:2023年3月24日 &#x…...

为什么 ChatGPT 输出时经常会中断,需要输入“继续” 才可以继续输出?
作者:明明如月学长, CSDN 博客专家,蚂蚁集团高级 Java 工程师,《性能优化方法论》作者、《解锁大厂思维:剖析《阿里巴巴Java开发手册》》、《再学经典:《EffectiveJava》独家解析》专栏作者。 热门文章推荐…...

PyTorch 之 基于经典网络架构训练图像分类模型
文章目录一、 模块简单介绍1. 数据预处理部分2. 网络模块设置3. 网络模型保存与测试二、数据读取与预处理操作1. 制作数据源2. 读取标签对应的实际名字3. 展示数据三、模型构建与实现1. 加载 models 中提供的模型,并且直接用训练的好权重当做初始化参数2. 参考 pyto…...
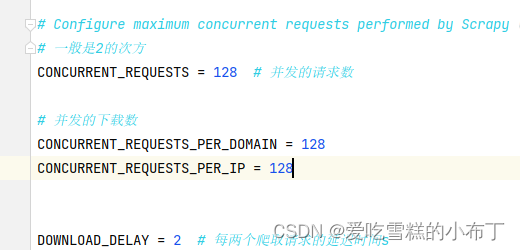
Scrapy的callback进入不了回调方法
一、前言 有的时候,Scrapy的callback方法直接被略过了,不去执行其中的回调方法,可能排查好久都排查不出来,我来教大家集中解决方法。 yield Request(urlurl, callbackself.parse_detail, cb_kwargs{item: item})二、解决方法 1…...

第二十一天 数据库开发-MySQL
目录 数据库开发-MySQL 前言 1. MySQL概述 1.1 安装 1.2 数据模型 1.3 SQL介绍 1.4 项目开发流程 2. 数据库设计-DDL 2.1 数据库操作 2.2 图形化工具 2.3 表操作 3. 数据库操作-DML 3.1 增加(insert) 3.2 修改(update) 3.3 删除(delete) 数据库开发-MySQL 前言 …...
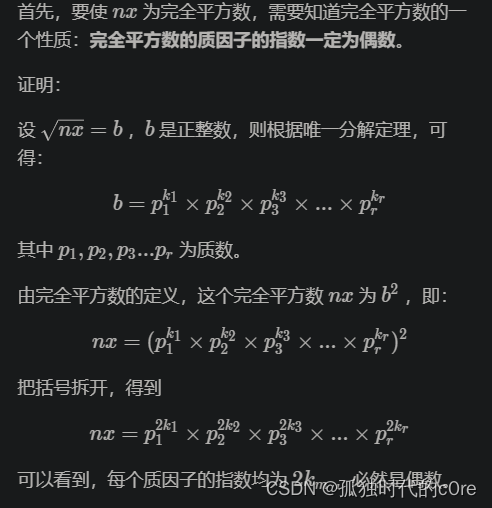
蓝桥杯每日一真题—— [蓝桥杯 2021 省 AB2] 完全平方数(数论,质因数分解)
文章目录[蓝桥杯 2021 省 AB2] 完全平方数题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1样例 #2样例输入 #2样例输出 #2提示思路:理论补充:完全平方数的一个性质:完全平方数的质因子的指数一定为偶数最终思路:小插曲&am…...
Linux编辑器-vim
一、vim简述1)vi/vim2)检查vim是否安装2)如何用vim打开文件3)vim的几种模式命令模式插入模式末行模式可视化模式二、vim的基本操作1)进入vim(命令行模式)2)[命令行模式]切换至[插入模式]3)[插入模式]切换至[命令行模式]4)[命令行模…...
5G将在五方面彻底改变制造业
想象一下这样一个未来,智能机器人通过在工厂车间重新配置自己,从多条生产线上组装产品。安全无人机处理着从监视入侵者到确认员工停车等繁琐的任务。自动驾驶汽车不仅可以在建筑物之间运输零部件,还可以在全国各地运输。工厂检查可以在千里之…...

http和https的区别?
http和https的区别?HTTPHTTPSHTTP与HTTPS区别HTTPS相比于HTTP协议的优点和缺点HTTP http是超文本传输协议 HTTP协议是基于传输层的TCP协议进行通信,通用无状态的协议。80端口 HTTPS https—安全的超文本传输协议 是以安全为目标的HTTP通道,…...
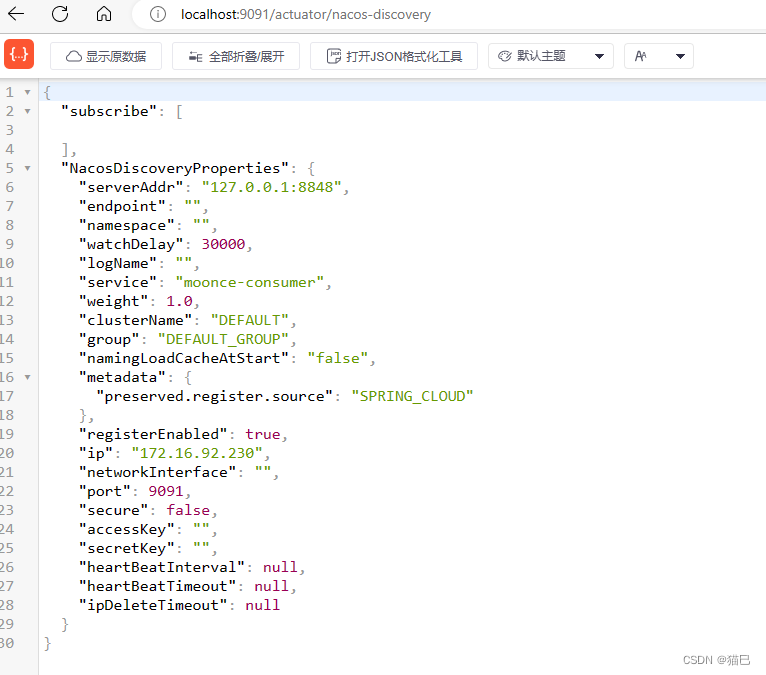
【Spring Cloud Alibaba】4.创建服务消费者
文章目录简介开始搭建创建项目修改POM文件添加启动类添加配置项添加Controller添加配置文件启动项目测试访问Nacos访问接口查看端点检查简介 接下来我们创建一个服务消费者,本操作先要完成之前的步骤,详情请参照【Spring Cloud Alibaba】Spring Cloud A…...
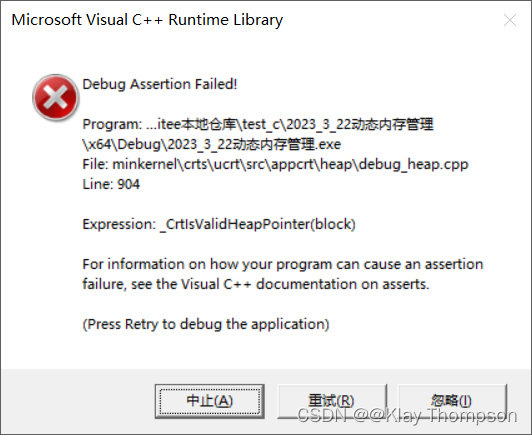
C语言——动态内存管理 malloc、calloc、realloc、free的使用
目录 一、为什么存在动态内存分配 二、动态内存函数的介绍 2.1malloc和free 2.2calloc 2.3realloc 三、常见的动态内存错误 3.1对NULL指针的解引用操作 3.2对动态开辟空间的越界访问 3.3对非动态开辟的内存使用free释放 3.4使用free释放一块动态开辟内存的一部分 3.5…...
技术分享——Java8新特性
技术分享——Java8新特性1.背景2. 新特性主要内容3. Lambda表达式4. 四大内置核心函数式接口4.1 Consumer<T>消费型接口4.2 Supplier<T>供给型接口4.3 Function<T,R>函数型接口4.4 Predicate<T> 断定型接口5. Stream流操作5.1 什么是流以及流的类型5.2…...

vue基础知识大全
1,指令作用 以v-开头,由vue提供的attribute,为渲染DOM应用提供特殊的响应式行为,也即是在表达式的值发生变化的时候响应式的更新DOM。其内容为可以被求值的js代码,可以写在return后面被返回的表达式。 指令的简写指令简…...
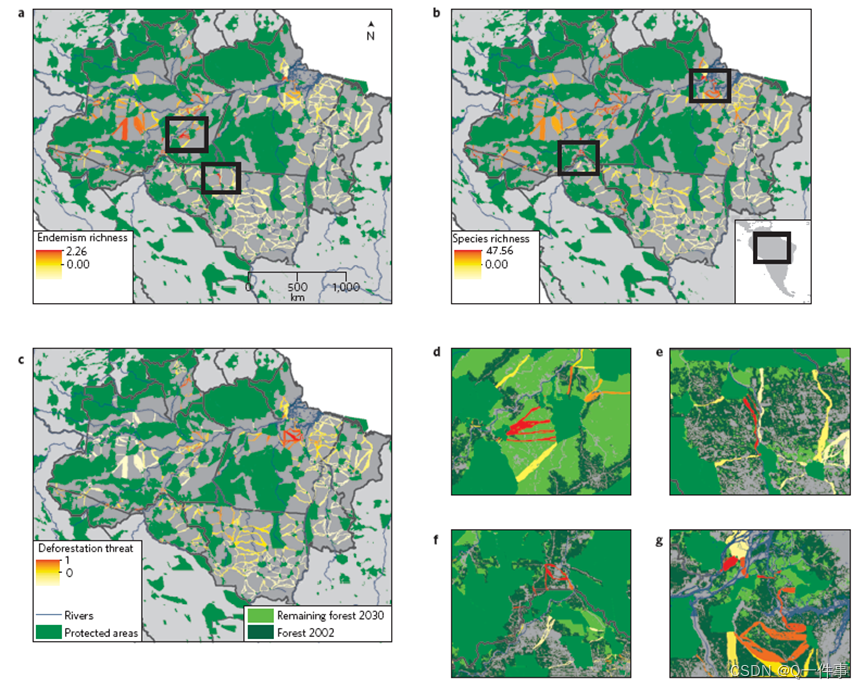
第2篇|文献研读|nature climate change|减缓气候变化和促进热带生物多样性的碳储量走廊
研究背景 从 2000 年到 2012 年,潮湿和干燥热带地区的森林总损失超过 90,000 平方公里 yr-1,这主要是由农业扩张驱动的。热带森林砍伐向大气中排放 0:95 Pg C yr-1 并导致广泛的生物多样性丧失。保护区的生物多样性取决于与保护区所在的更广泛景观的生态…...

诸侯割据:不是只有坏处——有些阶段,它是“必要的恶”
在主流的管理话语里,“诸侯割据”几乎是个贬义词。它让人联想到山头主义、资源内耗、总部失控。但有没有一种可能:它在某些阶段、某些条件下,恰恰是企业活下去、长起来的“必要代价”? 一、先看好处:诸侯式架构的“四…...

Spek音频频谱分析器:如何免费快速可视化音频频率的秘密世界
Spek音频频谱分析器:如何免费快速可视化音频频率的秘密世界 【免费下载链接】spek Acoustic spectrum analyser 项目地址: https://gitcode.com/gh_mirrors/sp/spek Spek是一款功能强大的开源音频频谱分析工具,能够将复杂的音频信号转换为直观的彩…...

asnumpy - 让昇腾NPU和NumPy无缝对接
刚学深度学习那会,最顺手的是 NumPy。各种矩阵运算、广播机制、索引操作,闭着眼睛都能写。 后来跑昇腾NPU,发现 NumPy 代码没法直接跑——torch.tensor 和 np.ndarray 不能混用,数据要手动转来转去,烦死了。 直到我发…...

机智云物联网边缘管理系统通过国产化硬件适配认证:实战解析边缘计算架构与生态价值
1. 项目概述:从“云端”到“边缘”,一次关键的认证意味着什么?最近,我们团队主导的“机智云物联网边缘管理系统”成功通过了某主流国产化硬件平台的适配认证。这个消息在内部技术群里传开时,很多同事的第一反应是&…...

AI大神Karpathy的学习心法,普通人也能直接抄作业
美国时间2026年5月19日,AI 圈被一条重磅消息刷屏:大牛 Andrej Karpathy 在社交媒体上正式宣布加入 Anthropic。对于整个科技圈而言,他的动向影响力堪比当年乔丹宣布重返 NBA 大联盟 。这一次,他加入了 Anthropic 的预训练团队&…...

三步解锁B站4K高清视频:免费下载大会员专属内容终极指南
三步解锁B站4K高清视频:免费下载大会员专属内容终极指南 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 你是不是也遇到过…...

企业AI知识库搭建实战:从文件管理到智能检索的完整方案
2025年我们团队做过一个调研,找了37家用了AI知识库的企业,发现一个有意思的规律:真正用起来的不到1/3,剩下2/3基本都卡在同一个地方——知识库和文件管理系统是割裂的。 你让员工把文件再上传一遍到知识库?没人干。你让…...

拆解Autosar NM报文:从0x600到0x6FF,手把手教你读懂CAN网络里的‘心跳包’
Autosar网络管理报文深度解析:从0x600到0x6FF的实战指南 当你第一次打开主机厂的网络管理规范文档,看到满屏的十六进制地址和比特位定义时,是否感到一头雾水?本文将化身你的"技术显微镜",带你逐字节拆解Auto…...

三分钟永久备份QQ空间:让青春记忆永不褪色的终极方案
三分钟永久备份QQ空间:让青春记忆永不褪色的终极方案 【免费下载链接】QZoneExport QQ空间导出助手,用于备份QQ空间的说说、日志、私密日记、相册、视频、留言板、QQ好友、收藏夹、分享、最近访客为文件,便于迁移与保存 项目地址: https://…...

跨平台项目实战:完整UI组件库与状态管理方案
一、项目实战概述随着移动端、Web端、桌面端多终端统一开发的需求日益普及,跨平台开发已成为企业级项目的主流选型。传统分端开发模式存在代码冗余、迭代效率低、UI风格不统一、状态逻辑复用困难等痛点。本项目以一套代码多端适配、UI标准化、状态统一管控为核心目标…...