(Arxiv-2023)潜在一致性模型:通过少步推理合成高分辨率图像
潜在一致性模型:通过少步推理合成高分辨率图像
Paper Title: Latent Consistency Models: Synthesizing High-Resolution Images with Few-Step Inference
Paper是清华发表在Arxiv 2023的工作
Paper地址
Code地址
ABSTRACT
潜在扩散模型 (LDM) 在合成高分辨率图像方面取得了显著成果。然而,迭代采样过程计算量大,导致生成速度慢。受一致性模型 (Song et al, 2023) 的启发,我们提出了潜在一致性模型 (LCM),能够在任何预训练的 LDM(包括稳定扩散 (Rombach et al, 2022))上以最少的步骤进行快速推理。将引导的反向扩散过程视为求解增强概率流 ODE (PF-ODE),LCM 旨在直接预测此类 ODE 在潜在空间中的解,从而减少大量迭代的需要并实现快速、高保真采样。从预训练的无分类器引导扩散模型中高效提炼而来,高质量的 768×768 2∼4 步 LCM 仅需 32 个 A100 GPU 小时的训练时间。此外,我们引入了潜在一致性微调 (LCF),这是一种新方法,专门用于在定制图像数据集上微调 LCM。在 LAION-5B-Aesthetics 数据集上的评估表明,LCM 仅需几步推理即可实现最先进的文本到图像生成性能。项目页面:地址
1 INTRODUCTION
扩散模型已成为强大的生成模型,在各个领域引起了广泛关注并取得了显着成果(Ho et al, 2020; Song et al, 2020a; Nichol & Dhariwal, 2021; Ramesh et al, 2022; Song & Ermon, 2019; Song et al, 2021)。特别是,潜在扩散模型(LDM)(例如稳定扩散(Rombach et al, 2022))表现出色,尤其是在高分辨率文本到图像合成任务中。LDM 可以通过利用对样本进行逐步去噪的迭代反向采样过程来生成以文本描述为条件的高质量图像。然而,扩散模型有一个明显的缺点:迭代反向采样过程导致生成速度慢,限制了它们的实时适用性。为了克服这个缺点,研究人员提出了几种提高采样速度的方法,包括通过增强 ODE 求解器来加速去噪过程 (Ho et al, 2020; Lu et al, 2022a;b),可以在 10∼20 个采样步骤内生成图像。另一种方法是将预先训练的扩散模型蒸馏成能够进行几步推理的模型 Salimans & Ho (2022); Meng et al (2023)。特别是,Meng et al (2023) 提出了一种两阶段蒸馏方法来提高无分类器引导模型的采样效率。最近,Song et al (2023) 提出了一致性模型作为一种有前途的替代方案,旨在加快生成过程。通过学习在 ODE 轨迹上保持点一致性的一致性映射,这些模型允许单步生成,从而无需计算密集型迭代。然而,Song 等人 (2023) 受限于像素空间图像生成任务,因此不适合合成高分辨率图像。此外,条件扩散模型的应用和无分类器引导的结合尚未得到探索,因此他们的方法不适合文本到图像的生成合成。

图 1:CFG 尺度为 ω = 8.0 的潜在一致性模型 (LCM) 生成的图像。只需 4,000 个训练步骤(约 32 个 A100 GPU 小时)即可从任何预训练的稳定扩散 (SD) 中提取 LCM,以在 2∼4 步甚至一步内生成高质量的 768×768 分辨率图像,从而显著加快文本到图像的生成。我们使用 LCM 仅用 4,000 次训练迭代就提取了 Dreamer-V7 版本的 SD。
在本文中,我们介绍了用于快速、高分辨率图像生成的潜在一致性模型 (LCM)。类似LDM,我们在稳定扩散 (Rombach 等人,2022) 的预训练自编码器的图像潜在空间中采用一致性模型。我们提出了一种单阶段引导蒸馏方法,通过求解增强 PF-ODE 将预训练的引导扩散模型有效地转换为潜在一致性模型。此外,我们提出了潜在一致性微调,它允许对预训练的 LCM 进行微调,以支持对定制图像数据集进行几步推理。我们的主要贡献总结如下:
-
我们提出了潜在一致性模型 (LCM),用于快速、高分辨率图像生成。LCM 在图像潜在空间中采用一致性模型,能够在预先训练的潜在扩散模型(例如稳定扩散 (SD))上实现快速的几步甚至一步高保真采样。
-
我们提供了一种简单高效的单阶段引导一致性蒸馏方法,用于蒸馏几步(2∼4)甚至 1 步采样的 SD。我们提出了 SKIPPING-STEP 技术来进一步加速收敛。对于 2 步和 4 步推理,我们的方法仅花费 32 个 A100 GPU 小时进行训练,并在 LAION-5B-Aesthetics 数据集上实现了最佳性能。
-
我们为 LCM 引入了一种新的微调方法,称为潜在一致性微调,可以使预训练的 LCM 有效地适应定制数据集,同时保留快速推理的能力。
2 RELATED WORK
扩散模型在图像生成方面取得了巨大成功(Ho et al, 2020; Song et al, 2020a; Nichol & Dhariwal, 2021; Ramesh et al, 2022; Rombach et al, 2022; Song & Ermon, 2019)。
它们经过训练,可以对受噪声破坏的数据进行去噪,以估计数据分布的分数。 在推理过程中,通过运行反向扩散过程来抽取样本,以逐渐对数据点进行去噪。 与 VAE(Kingma & Welling, 2013; Sohn et al, 2015)和 GAN(Goodfellow et al, 2020)相比,扩散模型具有训练稳定性和更好的似然估计的优势。
加速 DM。 然而,扩散模型的瓶颈在于其缓慢的生成速度。
已经提出了各种方法,包括无需训练的方法,例如 ODE 求解器(Song 等人,2020a;Lu 等人,2022a;b)、自适应步长求解器(Jolicoeur-Martineau 等人,2021)、预测校正方法(Song 等人,2020b)。基于训练的方法包括优化离散化(Watson 等人,2021)、截断扩散(Lyu 等人,2022;Zheng 等人,2022)、神经算子(Zheng 等人,2023)和蒸馏(Salimans & Ho,2022;Meng 等人,2023)。最近,还提出了用于更快采样的新型生成模型(Liu 等人,2022;2023)。
潜在扩散模型 (LDM) (Rombach 等人,2022) 在合成高分辨率文本到图像方面表现出色。例如,稳定扩散 (SD) 在数据潜在空间中执行正向和反向扩散过程,从而提高计算效率。
一致性模型 (CM) (Song 等人,2023) 作为一种新型生成模型,在保持生成质量的同时实现更快的采样,显示出巨大的潜力。CM 采用一致性映射将 ODE 轨迹中的任何点直接映射到其原点,从而实现快速的一步生成。CM 可以通过蒸馏预训练的扩散模型或作为独立的生成模型进行训练。CM 的细节将在下一节中详细说明。
3 PRELIMINARIES
在本节中,我们简要回顾了扩散模型和一致性模型,并定义了相关的符号。
扩散模型:扩散模型,或基于评分的生成模型 (Ho et al., 2020; Song et al., 2020a),是一类生成模型,它通过逐步向数据中注入高斯噪声,然后通过反向去噪过程从噪声中生成样本。具体来说,扩散模型定义了一个将原始数据分布 p data ( x ) p_{\text{data}}(x) pdata(x) 转换为边缘分布 q t ( x t ) q_t\left(\boldsymbol{x}_t\right) qt(xt) 的前向过程,通过转移核: q 0 t ( x t ∣ x 0 ) = N ( x t ∣ α ( t ) x 0 , σ 2 ( t ) I ) q_{0 t}\left(\boldsymbol{x}_t \mid \boldsymbol{x}_0\right)=\mathcal{N}\left(\boldsymbol{x}_t \mid \alpha(t) \boldsymbol{x}_0, \sigma^2(t) \boldsymbol{I}\right) q0t(xt∣x0)=N(xt∣α(t)x0,σ2(t)I),其中 α ( t ) , σ ( t ) \alpha(t), \sigma(t) α(t),σ(t) 指定了噪声时间表。从连续时间的角度来看,前向过程可以通过随机微分方程 (SDE) 来描述 (Song et al., 2020b; Lu et al., 2022a; Karras et al., 2022) 对于 t ∈ [ 0 , T ] t \in [0, T] t∈[0,T]:
d x t = f ( t ) x t d t + g ( t ) d w t , x 0 ∼ p data ( x 0 ) \mathrm{d} \boldsymbol{x}_t=f(t) \boldsymbol{x}_t \mathrm{~d} t+g(t) \mathrm{d} \boldsymbol{w}_t, \boldsymbol{x}_0 \sim p_{\text {data }}\left(\boldsymbol{x}_0\right) dxt=f(t)xt dt+g(t)dwt,x0∼pdata (x0)
其中 w t \boldsymbol{w}_t wt 是标准布朗运动,并且
f ( t ) = d log α ( t ) d t , g 2 ( t ) = d σ 2 ( t ) d t − 2 d log α ( t ) d t σ 2 ( t ) ( 1 ) f(t)=\frac{\mathrm{d} \log \alpha(t)}{\mathrm{d} t}, \quad g^2(t)=\frac{\mathrm{d} \sigma^2(t)}{\mathrm{d} t}-2 \frac{\mathrm{d} \log \alpha(t)}{\mathrm{d} t} \sigma^2(t)\quad(1) f(t)=dtdlogα(t),g2(t)=dtdσ2(t)−2dtdlogα(t)σ2(t)(1)
通过考虑反向时间SDE(更多详细信息请参见附录A),可以证明边缘分布 q t ( x ) q_t(\boldsymbol{x}) qt(x) 满足以下常微分方程,称为概率流ODE (PF-ODE) (Song et al., 2020b; Lu et al., 2022a):
d x t d t = f ( t ) x t − 1 2 g 2 ( t ) ∇ x log q t ( x t ) , x T ∼ q T ( x T ) ( 2 ) \frac{\mathrm{d} \boldsymbol{x}_t}{\mathrm{~d} t}=f(t) \boldsymbol{x}_t-\frac{1}{2} g^2(t) \nabla_{\boldsymbol{x}} \log q_t\left(\boldsymbol{x}_t\right), \boldsymbol{x}_T \sim q_T\left(\boldsymbol{x}_T\right)\quad(2) dtdxt=f(t)xt−21g2(t)∇xlogqt(xt),xT∼qT(xT)(2)
在扩散模型中,我们训练噪声预测模型 ϵ θ ( x t , t ) \boldsymbol{\epsilon}_{\boldsymbol{\theta}}\left(\boldsymbol{x}_t, t\right) ϵθ(xt,t) 以拟合 − ∇ log q t ( x t ) -\nabla \log q_t\left(\boldsymbol{x}_t\right) −∇logqt(xt)(称为得分函数)。通过使用噪声预测模型来近似得分函数,可以得到以下用于采样的经验 P F − O D E PF-ODE PF−ODE:
d x t d t = f ( t ) x t + g 2 ( t ) 2 σ t ϵ θ ( x t , t ) , x T ∼ N ( 0 , σ ~ 2 I ) ( 3 ) \frac{\mathrm{d} \boldsymbol{x}_t}{\mathrm{~d} t}=f(t) \boldsymbol{x}_t+\frac{g^2(t)}{2 \sigma_t} \boldsymbol{\epsilon}_\theta\left(\boldsymbol{x}_t, t\right), \quad \boldsymbol{x}_T \sim \mathcal{N}\left(\mathbf{0}, \tilde{\sigma}^2 \boldsymbol{I}\right)\quad(3) dtdxt=f(t)xt+2σtg2(t)ϵθ(xt,t),xT∼N(0,σ~2I)(3)
对于类条件扩散模型,Classifier-Free Guidance (CFG) (Ho & Salimans, 2022) 是一种有效的技术,可以显著提高生成样本的质量,并已广泛应用于多个大规模扩散模型中,包括GLIDE (Nichol et al., 2021)、Stable Diffusion (Rombach et al., 2022)、DALL·E 2 (Ramesh et al., 2022) 和 Imagen (Saharia et al., 2022)。给定CFG尺度 ω \omega ω,原始噪声预测被替换为条件和无条件噪声预测的线性组合,即 ϵ ~ θ ( z t , ω , c , t ) = ( 1 + ω ) ϵ θ ( z t , c , t ) − ω ϵ θ ( z , ∅ , t ) \tilde{\boldsymbol{\epsilon}}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_t, \omega, \boldsymbol{c}, t\right)=(1+\omega) \boldsymbol{\epsilon}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right)-\omega \boldsymbol{\epsilon}_{\boldsymbol{\theta}}(\boldsymbol{z}, \varnothing, t) ϵ~θ(zt,ω,c,t)=(1+ω)ϵθ(zt,c,t)−ωϵθ(z,∅,t)。
一致性模型:一致性模型 (CM) (Song et al., 2023) 是一类新的生成模型,可以实现一步或少步生成。CM的核心思想是学习将PF-ODE轨迹上的任意点映射到该轨迹的起点(即PF-ODE的解)的函数。更正式地,一致性函数定义为 f : ( x t , t ) ⟼ x ϵ f:\left(x_t, t\right) \longmapsto x_\epsilon f:(xt,t)⟼xϵ,其中 ϵ \epsilon ϵ 是一个固定的小正数。一个重要的观察是,一致性函数应满足自一致性属性:
f ( x t , t ) = f ( x t ′ , t ′ ) , ∀ t , t ′ ∈ [ ϵ , T ] ( 4 ) \boldsymbol{f}\left(\boldsymbol{x}_t, t\right)=\boldsymbol{f}\left(\boldsymbol{x}_{t^{\prime}}, t^{\prime}\right), \forall t, t^{\prime} \in[\epsilon, T]\quad(4) f(xt,t)=f(xt′,t′),∀t,t′∈[ϵ,T](4)
(Song et al., 2023) 中学习一致性模型 f θ f_\theta fθ 的关键思想是通过有效地在公式4中强制执行自一致性属性来从数据中学习一致性函数。为了确保 f θ ( x , ϵ ) = x f_\theta(x, \epsilon)=x fθ(x,ϵ)=x,一致性模型 f θ f_\theta fθ 被参数化为:
f θ ( x , t ) = c skip ( t ) x + c out ( t ) F θ ( x , t ) ( 5 ) \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{x}, t)=c_{\text {skip }}(t) \boldsymbol{x}+c_{\text {out }}(t) \boldsymbol{F}_{\boldsymbol{\theta}}(\boldsymbol{x}, t)\quad(5) fθ(x,t)=cskip (t)x+cout (t)Fθ(x,t)(5)
其中 c skip ( t ) c_{\text {skip }}(t) cskip (t) 和 c out ( t ) c_{\text {out }}(t) cout (t) 是可微函数,并且 c skip ( ϵ ) = 1 c_{\text {skip }}(\epsilon)=1 cskip (ϵ)=1 和 c out ( ϵ ) = 0 c_{\text {out }}(\epsilon)=0 cout (ϵ)=0,而 F θ ( x , t ) \boldsymbol{F}_{\boldsymbol{\theta}}(\boldsymbol{x}, t) Fθ(x,t) 是一个深度神经网络。CM可以通过从预训练的扩散模型中提炼(称为一致性提炼)或从头开始训练来获得。为了强制执行自一致性属性,我们维护一个目标模型 θ − \boldsymbol{\theta}^{-} θ−,通过参数 θ \boldsymbol{\theta} θ 的指数移动平均 (EMA) 更新,即 θ − ← μ θ − + ( 1 − μ ) θ \boldsymbol{\theta}^{-} \leftarrow \mu \boldsymbol{\theta}^{-}+(1-\mu) \boldsymbol{\theta} θ−←μθ−+(1−μ)θ,并定义一致性损失为:
L ( θ , θ − ; Φ ) = E x , t [ d ( f θ ( x t n + 1 , t n + 1 ) , f θ − ( x ^ i n ϕ , t n ) ) ] ( 6 ) \mathcal{L}\left(\boldsymbol{\theta}, \boldsymbol{\theta}^{-} ; \Phi\right)=\mathbb{E}_{\boldsymbol{x}, t}\left[d\left(\boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{x}_{t_{n+1}}, t_{n+1}\right), \boldsymbol{f}_{\boldsymbol{\theta}^{-}}\left(\hat{\boldsymbol{x}}_{i_n}^\phi, t_n\right)\right)\right]\quad(6) L(θ,θ−;Φ)=Ex,t[d(fθ(xtn+1,tn+1),fθ−(x^inϕ,tn))](6)
其中 d ( ⋅ , ⋅ ) d(\cdot, \cdot) d(⋅,⋅) 是用于测量两个样本之间距离的度量函数,例如平方 ℓ 2 \ell_2 ℓ2 距离 d ( x , y ) = ∥ x − y ∥ 2 2 d(\boldsymbol{x}, \boldsymbol{y})=\|\boldsymbol{x}-\boldsymbol{y}\|_2^2 d(x,y)=∥x−y∥22。 x ^ t n ϕ \hat{\boldsymbol{x}}_{t_n}^\phi x^tnϕ 是 x t n \boldsymbol{x}_{t_n} xtn 的一步估计:
x ^ t n ϕ ← x t n + 1 + ( t n − t n + 1 ) Φ ( x t n + 1 , t n + 1 ; ϕ ) ( 7 ) \hat{\boldsymbol{x}}_{t_n}^\phi \leftarrow \boldsymbol{x}_{t_{n+1}}+\left(t_n-t_{n+1}\right) \Phi\left(\boldsymbol{x}_{t_{n+1}}, t_{n+1} ; \phi\right)\quad(7) x^tnϕ←xtn+1+(tn−tn+1)Φ(xtn+1,tn+1;ϕ)(7)
其中 Φ \Phi Φ 表示应用于公式24中的PF-ODE的一步ODE求解器。 (Song et al., 2023) 使用Euler (Song et al., 2020b) 或 Heun求解器 (Karras et al., 2022) 作为数值ODE求解器。更多详细信息和一致性蒸馏的伪代码(算法2)请参见附录A。

4 LATENT CONSISTENCY MODELS
一致性模型 (CMs) (Song et al., 2023) 仅专注于 ImageNet 64 × 64 64 \times 64 64×64 (Deng et al., 2009) 和 LSUN 256 × 256 256 \times 256 256×256 (Yu et al., 2015) 上的图像生成任务。CMs 在生成更高分辨率的文本到图像任务上的潜力仍未被探索。在本文中,我们在第4.1节中引入了潜在一致性模型 (LCMs) 来应对这些更具挑战性的任务,释放CMs的潜力。与LDMs类似,我们的LCMs在图像潜在空间中采用一致性模型。我们选择强大的Stable Diffusion (SD) 作为基础扩散模型进行蒸馏。我们的目标是在不损失图像质量的前提下,实现SD的少步 ( 2 ∼ 4 ) (2 \sim 4) (2∼4) 甚至一步推理。分类器自由引导 (CFG) (Ho & Salimans, 2022) 是一种有效的技术,可以进一步提高样本质量,并广泛应用于SD中。然而,其在CMs中的应用尚未被探索。我们在第4.2节中提出了一种简单的单阶段引导蒸馏方法,通过求解增强的PF-ODE,有效地将CFG整合到LCM中。在第4.3节中,我们提出了跳步技术 (SKIPPING-STEP) 来加速LCMs的收敛。最后,我们在第4.4节中提出潜在一致性微调 (Latent Consistency Fine-tuning) 以在自定义数据集上微调预训练的LCM,实现少步推理。
4.1 CONSISTENCY DISTILLATION IN THE LATENT SPACE
在大规模扩散模型如Stable Diffusion (SD) (Rombach et al., 2022)中利用图像潜在空间有效提升了图像生成质量并减少了计算负载。在SD中,首先训练一个自编码器 ( E , D ) (\mathcal{E}, \mathcal{D}) (E,D),将高维图像数据压缩为低维潜在向量 z = E ( x ) z=\mathcal{E}(x) z=E(x),然后解码以重建图像为 x ^ = D ( z ) \hat{x}=\mathcal{D}(z) x^=D(z)。在潜在空间中训练扩散模型相比于基于像素的模型大大降低了计算成本并加快了推理过程;LDMs使得在笔记本GPU上生成高分辨率图像成为可能。对于LCMs,我们利用潜在空间的一致性蒸馏优势,与CMs (Song et al., 2023)中使用的像素空间形成对比。这种方法称为潜在一致性蒸馏 (LCD),应用于预训练的SD,使得在 1 ∼ 4 1 \sim 4 1∼4步内合成高分辨率 (例如 768 × 768 768 \times 768 768×768) 图像。我们专注于条件生成。回顾逆扩散过程的PF-ODE (Song et al., 2020b; Lu et al., 2022a) 为
d z t d t = f ( t ) z t + g 2 ( t ) 2 σ t ϵ θ ( z t , c , t ) , z T ∼ N ( 0 , σ ~ 2 I ) ( 8 ) \frac{\mathrm{d} \boldsymbol{z}_t}{\mathrm{~d} t}=f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right), \quad \boldsymbol{z}_T \sim \mathcal{N}\left(\mathbf{0}, \tilde{\sigma}^2 \boldsymbol{I}\right) \quad(8) dtdzt=f(t)zt+2σtg2(t)ϵθ(zt,c,t),zT∼N(0,σ~2I)(8)
其中 z t \boldsymbol{z}_t zt为图像潜变量, ϵ θ ( z t , c , t ) \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right) ϵθ(zt,c,t)是噪声预测模型, c \boldsymbol{c} c是给定的条件 (例如文本)。可以通过求解从 T T T到0的PF-ODE来绘制样本。为了执行 L C D \mathbf{LCD} LCD,我们引入了一致性函数 f θ : ( z t , c , t ) ↦ z 0 f_\theta:\left(z_t, c, t\right) \mapsto z_0 fθ:(zt,c,t)↦z0以直接预测 t = 0 t=0 t=0的PF-ODE (Eq. 8) 的解。我们通过噪声预测模型 ϵ ^ θ \hat{\boldsymbol{\epsilon}}_\theta ϵ^θ对 f θ f_\theta fθ进行参数化,具体如下:
f θ ( z , c , t ) = c skip ( t ) z + c out ( t ) ( z − σ t ϵ ^ θ ( z , c , t ) α t ) , ( ϵ -Prediction ) ( 9 ) \boldsymbol{f}_{\boldsymbol{\theta}}(\boldsymbol{z}, \boldsymbol{c}, t)=c_{\text {skip }}(t) \boldsymbol{z}+c_{\text {out }}(t)\left(\frac{\boldsymbol{z}-\sigma_t \hat{\boldsymbol{\epsilon}}_\theta(\boldsymbol{z}, \boldsymbol{c}, t)}{\alpha_t}\right), \quad(\boldsymbol{\epsilon} \text {-Prediction })\quad(9) fθ(z,c,t)=cskip (t)z+cout (t)(αtz−σtϵ^θ(z,c,t)),(ϵ-Prediction )(9)
其中 c skip ( 0 ) = 1 , c out ( 0 ) = 0 c_{\text {skip }}(0)=1, c_{\text {out }}(0)=0 cskip (0)=1,cout (0)=0, ϵ ^ θ ( z , c , t ) \hat{\boldsymbol{\epsilon}}_\theta(\boldsymbol{z}, \boldsymbol{c}, t) ϵ^θ(z,c,t)是一个噪声预测模型,初始化时与教师扩散模型具有相同的参数。值得注意的是, f θ \boldsymbol{f}_{\boldsymbol{\theta}} fθ可以通过多种方式进行参数化,具体取决于教师扩散模型对预测的参数化 (例如, x , ϵ \boldsymbol{x}, \boldsymbol{\epsilon} x,ϵ (Ho et al., 2020), v \boldsymbol{v} v (Salimans & Ho, 2022))。我们在附录D中讨论了其他可能的参数化方法。
我们假设有一个有效的ODE求解器 Ψ ( z t , t , s , c ) \Psi\left(\boldsymbol{z}_t, t, s, c\right) Ψ(zt,t,s,c)可用于从时间 t t t到 s s s的近似Eq 8右侧的积分。在实践中,我们可以使用DDIM (Song et al., 2020a)、DPM-Solver (Lu et al., 2022a)或DPM-Solver++ (Lu et al., 2022b)作为 Ψ ( ⋅ , ⋅ , ⋅ , ⋅ ) \Psi(\cdot, \cdot, \cdot, \cdot) Ψ(⋅,⋅,⋅,⋅)。请注意,我们仅在训练/蒸馏时使用这些求解器,而不是在推理时。当我们在第4.3节中介绍SKIPPING-STEP技术时,我们将进一步讨论这些求解器。LCM旨在通过最小化一致性蒸馏损失 (Song et al., 2023) 来预测PF-ODE的解:
L C D ( θ , θ − ; Ψ ) = E z , c , n [ d ( f θ ( z t n + 1 , c , t n + 1 ) , f θ − ( z ^ t n Ψ , c , t n ) ) ] ( 10 ) \mathcal{L}_{\mathcal{C D}}\left(\boldsymbol{\theta}, \boldsymbol{\theta}^{-} ; \Psi\right)=\mathbb{E}_{\boldsymbol{z}, c, n}\left[d\left(\boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_{n+1}}, \boldsymbol{c}, t_{n+1}\right), \boldsymbol{f}_{\boldsymbol{\theta}^{-}}\left(\hat{\boldsymbol{z}}_{t_n}^{\Psi}, \boldsymbol{c}, t_n\right)\right)\right]\quad(10) LCD(θ,θ−;Ψ)=Ez,c,n[d(fθ(ztn+1,c,tn+1),fθ−(z^tnΨ,c,tn))](10)
这里, z ^ t n Ψ \hat{z}_{t_n}^{\Psi} z^tnΨ是从 t n + 1 → t n t_{n+1} \rightarrow t_n tn+1→tn 使用ODE求解器 Ψ \Psi Ψ对 P F − O D E P F-O D E PF−ODE的演化的估计:
z ^ t n Ψ − z t n + 1 = ∫ t n + 1 t n ( f ( t ) z t + g 2 ( t ) 2 σ t ϵ θ ( z t , c , t ) ) d t ≈ Ψ ( z t n + 1 , t n + 1 , t n , c ) ( 11 ) \hat{\boldsymbol{z}}_{t_n}^{\Psi}-\boldsymbol{z}_{t_{n+1}}=\int_{t_{n+1}}^{t_n}\left(f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right)\right) \mathrm{d} t \approx \Psi\left(\boldsymbol{z}_{t_{n+1}}, t_{n+1}, t_n, \boldsymbol{c}\right)\quad(11) z^tnΨ−ztn+1=∫tn+1tn(f(t)zt+2σtg2(t)ϵθ(zt,c,t))dt≈Ψ(ztn+1,tn+1,tn,c)(11)
其中,求解器 Ψ ( ⋅ , ⋅ , ⋅ , ⋅ ) \Psi(\cdot, \cdot, \cdot, \cdot) Ψ(⋅,⋅,⋅,⋅)用于近似从 t n + 1 → t n t_{n+1} \rightarrow t_n tn+1→tn的积分。
4.2 ONE-STAGE GUIDED DISTILLATION BY SOLVING AUGMENTED PF-ODE
Classifier-free guidance (CFG) (Ho & Salimans, 2022) 在SD中对于生成高质量文本对齐图像至关重要,通常需要一个CFG缩放 ω \omega ω超过6。因此,将CFG整合到蒸馏方法中变得不可或缺。之前的方法Guided-Distill (Meng et al., 2023)引入了一个两阶段的蒸馏方法,以支持从一个引导的扩散模型进行少步采样。然而,它计算量很大(例如,据估计在(Liu et al., 2023)中,用于2步推理的计算量至少需要45个A100 GPU日)。相较之下,一个LCM仅需32个A100 GPU小时的训练即可实现2步推理,如图1所示。此外,两阶段的引导蒸馏可能导致累积误差,从而导致次优性能。相比之下,LCMs采用高效的一阶段引导蒸馏,通过求解增强的PF-ODE来实现。回顾在逆扩散过程中使用的CFG:
ϵ ~ θ ( z t , ω , c , t ) : = ( 1 + ω ) ϵ θ ( z t , c , t ) − ω ϵ θ ( z t , ∅ , t ) ( 12 ) \tilde{\boldsymbol{\epsilon}}_\theta\left(\boldsymbol{z}_t, \omega, \boldsymbol{c}, t\right):=(1+\omega) \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right)-\omega \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \varnothing, t\right)\quad(12) ϵ~θ(zt,ω,c,t):=(1+ω)ϵθ(zt,c,t)−ωϵθ(zt,∅,t)(12)
其中,原始的噪声预测被条件和无条件噪声的线性组合所取代,而 ω \omega ω被称为引导比例。要从引导的逆过程进行采样,我们需要求解以下增强的PF-ODE:(即,增加了与 ω \omega ω相关的项)
d z t d t = f ( t ) z t + g 2 ( t ) 2 σ t ϵ ~ θ ( z t , ω , c , t ) , z T ∼ N ( 0 , σ ~ 2 I ) ( 13 ) \frac{\mathrm{d} \boldsymbol{z}_t}{\mathrm{~d} t}=f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \tilde{\boldsymbol{\epsilon}}_\theta\left(\boldsymbol{z}_t, \omega, \boldsymbol{c}, t\right), \quad \boldsymbol{z}_T \sim \mathcal{N}\left(\mathbf{0}, \tilde{\sigma}^2 \boldsymbol{I}\right)\quad(13) dtdzt=f(t)zt+2σtg2(t)ϵ~θ(zt,ω,c,t),zT∼N(0,σ~2I)(13)
为了高效地执行一阶段引导蒸馏,我们引入了一个增强的一致性函数 f θ : ( z t , ω , c , t ) ↦ z 0 \boldsymbol{f}_\theta:\left(z_t, \omega, \boldsymbol{c}, t\right) \mapsto \boldsymbol{z}_0 fθ:(zt,ω,c,t)↦z0,直接预测增强的PF-ODE (Eq. 13)在 t = 0 t=0 t=0时的解。我们对 f θ f_{\boldsymbol{\theta}} fθ的参数化方式与Eq. 9相同,不同的是 ϵ ^ θ ( z , c , t ) \hat{\boldsymbol{\epsilon}}_\theta(\boldsymbol{z}, \boldsymbol{c}, t) ϵ^θ(z,c,t)被 ϵ ^ θ ( z , ω , c , t ) \hat{\boldsymbol{\epsilon}}_\theta(\boldsymbol{z}, \omega, \boldsymbol{c}, t) ϵ^θ(z,ω,c,t)替代,这是一个噪声预测模型,初始化时与教师扩散模型的参数相同,但也包含用于 ω \omega ω调节的额外可训练参数。一致性损失与Eq. 10相同,只不过我们使用增强的一致性函数 f θ ( z t , ω , c , t ) \boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{\boldsymbol{t}}, \omega, \boldsymbol{c}, t\right) fθ(zt,ω,c,t)。
L C D ( θ , θ − ; Ψ ) = E z , c , ω , n [ d ( f θ ( z t n + 1 , ω , c , t n + 1 ) , f θ − ( z ^ t n Ψ , ω , ω , c , t n ) ) ] ( 14 ) \mathcal{L}_{\mathcal{C D}}\left(\boldsymbol{\theta}, \boldsymbol{\theta}^{-} ; \Psi\right)=\mathbb{E}_{\boldsymbol{z}, c, \omega, n}\left[d\left(\boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_{n+1}}, \omega, \boldsymbol{c}, t_{n+1}\right), \boldsymbol{f}_{\boldsymbol{\theta}^{-}}\left(\hat{\boldsymbol{z}}_{t_n}^{\Psi, \omega}, \omega, \boldsymbol{c}, t_n\right)\right)\right]\quad(14) LCD(θ,θ−;Ψ)=Ez,c,ω,n[d(fθ(ztn+1,ω,c,tn+1),fθ−(z^tnΨ,ω,ω,c,tn))](14)
在Eq 14中, ω \omega ω和 n n n分别从区间 [ ω min , ω max ] \left[\omega_{\min }, \omega_{\max }\right] [ωmin,ωmax]和 { 1 , … , N − 1 } \{1, \ldots, N-1\} {1,…,N−1}中均匀采样。 z ^ t n Ψ , ω \hat{\boldsymbol{z}}_{t_n}^{\Psi, \omega} z^tnΨ,ω使用新的噪声模型 ϵ ~ θ ( z t , ω , c , t ) \tilde{\boldsymbol{\epsilon}}_\theta\left(\boldsymbol{z}_t, \omega, \boldsymbol{c}, t\right) ϵ~θ(zt,ω,c,t)进行估计,如下:
z ^ t n D , ω − z t n + 1 = ∫ t n + 1 t n ( f ( t ) z t + g 2 ( t ) 2 σ t ϵ ~ θ ( z t , ω , c , t ) ) d t = ( 1 + ω ) ∫ t n + 1 t n ( f ( t ) z t + g 2 ( t ) 2 σ t ϵ θ ( z t , c , t ) ) d t − ω ∫ t n + 1 t n ( f ( t ) z t + g 2 ( t ) 2 σ t ϵ θ ( z t , ∅ , t ) ) d t ≈ ( 1 + ω ) Ψ ( z t n + 1 , t n + 1 , t n , c ) − ω Ψ ( z t n + 1 , t n + 1 , t n , ∅ ) ( 15 ) \begin{aligned} \hat{\boldsymbol{z}}_{t_n}^{\mathbb{D}, \omega}-\boldsymbol{z}_{t_{n+1}} & =\int_{t_{n+1}}^{t_n}\left(f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \tilde{\boldsymbol{\epsilon}}_\theta\left(\boldsymbol{z}_t, \omega, \boldsymbol{c}, t\right)\right) \mathrm{d} t \\ & =(1+\omega) \int_{t_{n+1}}^{t_n}\left(f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \boldsymbol{c}, t\right)\right) \mathrm{d} t-\omega \int_{t_{n+1}}^{t_n}\left(f(t) \boldsymbol{z}_t+\frac{g^2(t)}{2 \sigma_t} \boldsymbol{\epsilon}_\theta\left(\boldsymbol{z}_t, \varnothing, t\right)\right) \mathrm{d} t \\ & \approx(1+\omega) \Psi\left(\boldsymbol{z}_{t_{n+1}}, t_{n+1}, t_n, \boldsymbol{c}\right)-\omega \Psi\left(\boldsymbol{z}_{t_{n+1}}, t_{n+1}, t_n, \varnothing\right) \end{aligned}\quad(15) z^tnD,ω−ztn+1=∫tn+1tn(f(t)zt+2σtg2(t)ϵ~θ(zt,ω,c,t))dt=(1+ω)∫tn+1tn(f(t)zt+2σtg2(t)ϵθ(zt,c,t))dt−ω∫tn+1tn(f(t)zt+2σtg2(t)ϵθ(zt,∅,t))dt≈(1+ω)Ψ(ztn+1,tn+1,tn,c)−ωΨ(ztn+1,tn+1,tn,∅)(15)
同样,我们可以使用DDIM (Song et al., 2020a)、DPM-Solver (Lu et al., 2022a)或DPM-Solver++ (Lu et al., 2022b)作为PF-ODE求解器 Ψ ( ⋅ , ⋅ , ⋅ , ⋅ ) \Psi(\cdot, \cdot, \cdot, \cdot) Ψ(⋅,⋅,⋅,⋅)。
4.3 ACCELERATING DISTILLATION WITH SKIPPING TIME STEPS
离散扩散模型 (Ho et al., 2020; Song & Ermon, 2019) 通常使用一个长时间步长计划 { t i } i \left\{t_i\right\}_i {ti}i(也称为离散计划或时间计划)来训练噪声预测模型,以实现高质量的生成结果。例如,Stable Diffusion (SD) 的时间计划长度为1000。然而,直接将潜在一致性蒸馏(Latent Consistency Distillation, LCD)应用于SD具有这样一个扩展的计划可能会有问题。模型需要在所有1000个时间步长之间进行采样,并且一致性损失试图将LCM模型 f θ ( z t n + 1 , c , t n + 1 ) \boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_{n+1}}, \boldsymbol{c}, t_{n+1}\right) fθ(ztn+1,c,tn+1)的预测与沿着相同轨迹的下一个时间步长的预测 f θ ( z t n , c , t n ) \boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_n}, \boldsymbol{c}, t_n\right) fθ(ztn,c,tn)对齐。由于 t n − t n + 1 t_n-t_{n+1} tn−tn+1非常小, z t n \boldsymbol{z}_{t_n} ztn和 z t n + 1 \boldsymbol{z}_{t_{n+1}} ztn+1(以及 f θ ( z t n + 1 , c , t n + 1 ) \boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_{n+1}}, \boldsymbol{c}, t_{n+1}\right) fθ(ztn+1,c,tn+1)和 f θ ( z t n , c , t n ) \boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_n}, \boldsymbol{c}, t_n\right) fθ(ztn,c,tn))已经非常接近,导致一致性损失较小,因此导致收敛缓慢。为了解决这些问题,我们引入了SKIPPING-STEP方法,大大缩短了时间计划的长度(从数千缩短到数十),以实现快速收敛,同时保持生成质量。
一致性模型 (CMs) (Song et al., 2023) 使用EDM (Karras et al., 2022) 连续时间计划,并使用Euler或Heun Solver作为数值连续PF-ODE求解器。对于LCMs,为了适应Stable Diffusion中的离散时间计划,我们使用DDIM (Song et al., 2020a)、DPM-Solver (Lu et al., 2022a) 或 DPM-Solver++ (Lu et al., 2022b) 作为ODE求解器。 (Lu et al., 2022a) 表明这些高级求解器可以高效地求解Eq. 8中的PF-ODE。现在,我们在潜在一致性蒸馏 (LCD) 中介绍SKIPPING-STEP方法。LCMs旨在确保当前时间步长与 k k k步远的时间步长之间的一致性, t n + k → t n t_{n+k} \rightarrow t_n tn+k→tn,而不是确保相邻时间步长 t n + 1 → t n t_{n+1} \rightarrow t_n tn+1→tn之间的一致性。注意,设置 k = 1 k=1 k=1会还原为(Song et al., 2023)中的原始计划,导致收敛缓慢,而非常大的 k k k可能会导致ODE求解器的大近似误差。在我们的主要实验中,我们将 k k k设置为20,大大将时间计划长度从数千减少到数十。Sec. 5.2中的结果展示了各种 k k k值的效果,并揭示了SKIPPING-STEP方法在加速LCD过程中的重要性。具体来说,Eq. 14中的一致性提炼损失被修改为确保从 t n + k t_{n+k} tn+k到 t n t_n tn的一致性:
L C D ( θ , θ − ; Ψ ) = E z , c , ω , n [ d ( f θ ( z t n + k , ω , c , t n + k ) , f θ − ( z ^ t n Ψ , ω , ω , c , t n ) ) ] ( 16 ) \mathcal{L}_{\mathcal{C D}}\left(\boldsymbol{\theta}, \boldsymbol{\theta}^{-} ; \Psi\right)=\mathbb{E}_{\boldsymbol{z}, \boldsymbol{c}, \omega, n}\left[d\left(\boldsymbol{f}_{\boldsymbol{\theta}}\left(\boldsymbol{z}_{t_{n+k}}, \omega, \boldsymbol{c}, t_{n+k}\right), \boldsymbol{f}_{\boldsymbol{\theta}-}\left(\hat{\boldsymbol{z}}_{t_n}^{\Psi, \omega}, \omega, \boldsymbol{c}, t_n\right)\right)\right]\quad(16) LCD(θ,θ−;Ψ)=Ez,c,ω,n[d(fθ(ztn+k,ω,c,tn+k),fθ−(z^tnΨ,ω,ω,c,tn))](16)
其中 z ^ t n Ψ , ω \hat{\boldsymbol{z}}_{t_n}^{\Psi, \omega} z^tnΨ,ω是使用数值增强PF-ODE求解器 Ψ \Psi Ψ估计的 z t n \boldsymbol{z}_{t_n} ztn:
z ^ t n Ψ , ω ⟵ z t n + k + ( 1 + ω ) Ψ ( z t n + k , t n + k , t n , c ) − ω Ψ ( z t n + k , t n + k , t n , ∅ ) ( 17 ) \hat{\boldsymbol{z}}_{t_n}^{\Psi, \omega} \longleftarrow \boldsymbol{z}_{t_{n+k}}+(1+\omega) \Psi\left(\boldsymbol{z}_{t_{n+k}}, t_{n+k}, t_n, \boldsymbol{c}\right)-\omega \Psi\left(z_{t_{n+k}}, t_{n+k}, t_n, \varnothing\right)\quad(17) z^tnΨ,ω⟵ztn+k+(1+ω)Ψ(ztn+k,tn+k,tn,c)−ωΨ(ztn+k,tn+k,tn,∅)(17)
上述推导类似于Eq. 15。对于LCM,我们在此使用三种可能的ODE求解器:DDIM (Song et al., 2020a)、DPM-Solver (Lu et al., 2022a)、DPM-Solver++ (Lu et al., 2022b),我们在Sec 5.2中比较了它们的性能。实际上,DDIM (Song et al., 2020a)是DPM-Solver的一级离散化近似(已在(Lu et al., 2022a)中证明)。在此我们提供从 t n + k t_{n+k} tn+k到 t n t_n tn的DDIM PF-ODE求解器 Ψ DIIM \Psi_{\text {DIIM }} ΨDIIM 的详细公式。其他两个求解器 Ψ DPM-Solver , Ψ DPM-Solver++ \Psi_{\text {DPM-Solver }}, \Psi_{\text {DPM-Solver++ }} ΨDPM-Solver ,ΨDPM-Solver++ 的公式在附录E中提供。
Ψ D D I M ( z t n + k , t n + k , t n , c ) = α t n α t n + k z t n + k − σ t n ( σ t n + k ⋅ α t n α t n + k ⋅ σ t n − 1 ) ϵ ^ θ ( z t n + k , c , t n + k ) ⏟ DDIM Estimated z t n − z t n + k ( 18 ) \Psi_{\mathrm{DDIM}}\left(\boldsymbol{z}_{t_{n+k}}, t_{n+k}, t_n, \boldsymbol{c}\right)=\underbrace{\frac{\alpha_{t_n}}{\alpha_{t_{n+k}}} \boldsymbol{z}_{t_{n+k}}-\sigma_{t_n}\left(\frac{\sigma_{t_{n+k}} \cdot \alpha_{t_n}}{\alpha_{t_{n+k}} \cdot \sigma_{t_n}}-1\right) \hat{\boldsymbol{\epsilon}}_\theta\left(\boldsymbol{z}_{t_{n+k}}, \boldsymbol{c}, t_{n+k}\right)}_{\text {DDIM Estimated } \boldsymbol{z}_{t_n}}-\boldsymbol{z}_{t_{n+k}}\quad(18) ΨDDIM(ztn+k,tn+k,tn,c)=DDIM Estimated ztn αtn+kαtnztn+k−σtn(αtn+k⋅σtnσtn+k⋅αtn−1)ϵ^θ(ztn+k,c,tn+k)−ztn+k(18)
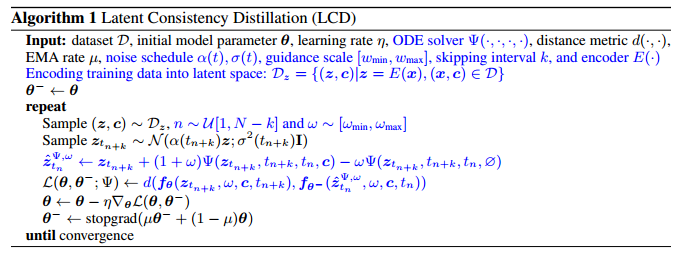
我们在算法1中提供了具有CFG和SKIPPING-STEP技术的LCD伪代码。对(Song et al., 2023)中原始一致性蒸馏(CD)算法的修改部分以蓝色标出。此外,LCM采样算法3在附录B中提供。
4.4 LATENT CONSISTENCY FINE-TUNING FOR CUSTOMIZED DATASET
稳定扩散等基础生成模型在各种文本到图像生成任务中表现出色,但通常需要在定制数据集上进行微调以满足下游任务的要求。
我们提出了潜在一致性微调 (LCF),这是一种针对预训练 LCM 的微调方法。受一致性训练 (CT) (Song et al, 2023) 的启发,LCF 可以在不依赖于此类数据上训练的教师扩散模型的情况下对定制数据集进行高效的几步推理。这种方法为扩散模型的传统微调方法提供了一种可行的替代方案。LCF 的伪代码在算法 4 中提供,附录 C 中有更详细的说明。
相关文章:
(Arxiv-2023)潜在一致性模型:通过少步推理合成高分辨率图像
潜在一致性模型:通过少步推理合成高分辨率图像 Paper Title: Latent Consistency Models: Synthesizing High-Resolution Images with Few-Step Inference Paper是清华发表在Arxiv 2023的工作 Paper地址 Code地址 ABSTRACT 潜在扩散模型 (LDM) 在合成高分辨率图像方…...

Unity与UE,哪种游戏引擎适合你?
PlayStation vs Xbox,Mario vs Sonic,Unreal vs Unity?无论是游戏主机、角色还是游戏引擎,人们总是热衷于捍卫他们在游戏行业中的偏爱。 专注于游戏引擎,Unity和Unreal Engine(简称UE4)是目前市…...

这五本大模型书籍,把大模型讲的非常详细,收藏我这一篇就够了
当然可以。在当前的大模型时代,随着自然语言处理(NLP)技术的迅速发展,出现了许多优秀的书籍来帮助读者理解这些复杂的技术。以下是几本值得推荐的大模型书籍,它们涵盖了从基础理论到高级实践的内容,可以帮助…...

伊朗通过 ChatGPT 试图影响美国大选, OpenAI 封禁多个账户|TodayAI
OpenAI 近日宣布,他们已经封禁了一系列与伊朗影响行动有关的 ChatGPT 账户,这些账户涉嫌利用该 AI 工具生成并传播与美国总统选举、以色列 – 哈马斯战争以及奥运会等相关的内容。 OpenAI 表示,这些账户与一个名为 “Storm-2035” 的秘密伊朗…...

windows系统如何走后面之windows系统隐藏账户
系统隐藏账户是一种最为简单有效的权限维持方式,其做法就是让攻击者创建一个新的具有管理员权限的隐藏账户,因为是隐藏账户,所以防守方是无法通过控制面板或命令行看到这个账户的。 自然我们需要一些前提条件,比如说有一个网站&am…...
(版本7.x)数据更新后刷新策略RefreshPolicy)
Elasticsearch(ES)(版本7.x)数据更新后刷新策略RefreshPolicy
Elasticsearch(ES)(版本7.x)数据更新后刷新策略RefreshPolicy 介绍 ES数据写入后,默认1s后才会被搜索到(refresh_interval为1); 这样可能是考虑到性能问题,毕竟实时IO 消耗较多资源 造成的问题 例如一个索引现在有…...

【运维】从一个git库迁移到另一个库
工作目录: /home/java/hosts 10.60.100.194 脚本 hosts / hostsShell GitLab (gbcom.com.cn) 核心代码...

and design vue表格列宽度拖拽,vue-draggable-resizable插件使用
and design vue2版的table表格不能拖拽列的宽度,通过vue-draggable-resizable插件实现 我用的是and design 1.7.8的版本,先下插件 yarn add vue-draggable-resizable2.1.0我这版本的and design用最新3.0.0以上的插件会有问题,实现不了效果&a…...

使用hexo搭建个人博客
很早之前使用hexo和github建了个人博客。搭建的流程一直没有梳理,中间换过几次机器,每次都得重新配置一遍,需要重新学些。最近电脑坏了,原始的数据没有导出来,先把以前文章写个文件占个位置,后面慢慢补吧&a…...

java geotool构建地理点线面
哈喽,各位小伙伴们,你们好呀,我是喵手。运营社区:C站/掘金/腾讯云/阿里云/华为云/51CTO;欢迎大家常来逛逛 今天我要给大家分享一些自己日常学习到的一些知识点,并以文字的形式跟大家一起交流,互…...

C# 中 Grpc服务端调用客户端方法
在 gRPC 中,服务端通常不直接调用客户端的方法,因为 gRPC 的设计模型是服务端提供服务,客户端调用服务。通常情况下,服务端和客户端之间是解耦的,服务端只提供服务端点,客户端通过这些端点发起请求。 不过…...

Arthas相关命令
官方网站:命令列表 | arthas 也可以用idea的插件arthas-idea的插件根据你想定位的代码生成命令 jvm 相关 dashboard - 当前系统的实时数据面板getstatic - 查看类的静态属性heapdump - dump java heap, 类似 jmap 命令的 heap dump 功能jvm - 查看当前 JVM 的信息l…...

2024年江苏省职业院校技能大赛 移动应用与开发中职赛项规程
2024年江苏省职业院校技能大赛 移动应用与开发中职赛项规程 (一)学生组竞赛内容:模块A:移动应用界面设计模块B:移动应用前端开发模块C:移动应用测试与交付 (二)教师组竞赛内容:模块A:…...

2024 Google 开发者大会,沉浸式体验AI社会公益
文章目录 一、现场打卡二、AI 社会公益三、Gemma 模型四、Gemini 模型五、Google Cloud六、现场体验七、带着问题逛展八、学习资源和活动九、结束 Happy Hour 一、现场打卡 大家好,我是小雨。 2024 Google 开发者大会,沉浸式体验AI社会公益 今天我们参加…...
)
OpenCV(开源计算机视觉库)
OpenCV(开源计算机视觉库)是一个专注于实时计算机视觉的全面库,包含了丰富的工具和功能。以下是 OpenCV 中一些关键知识点的详细列表: 核心功能 基本结构:Mat、Scalar、Point、Size、Rect 等。 图像 I/O:读…...

Java二十三种设计模式-责任链模式(17/23)
责任链模式:实现请求处理的灵活流转 引言 在这篇博客中,我们深入探讨了责任链模式的精髓,从其定义和用途到实现方法,再到使用场景、优缺点、与其他模式的比较,以及最佳实践和替代方案,旨在指导开发者如何…...

Electron31-ViteAdmin桌面端后台|vite5.x+electron31+element-plus管理系统Exe
原创自研Vue3Electron31ElementPlus桌面端轻量级后台管理Exe系统。 基于最新前端技术栈Vite5.x、Vue3、Electron31、ElementPlus、Vue-I18n、Echarts实战开发桌面端高颜值后台管理模板。内置4种布局模板,支持i18n国际化、动态权限路由,实现了表格、表单、…...
鸿蒙HarmonyOS实战:创建NDK工程、毕昇编译器
NDK适用场景 适合使用NDK的场景:应用涉及如下场景时,适合采用NDK开发 性能敏感的场景,如游戏、物理模拟等计算密集型场景。 需要复用已有C或C库的场景。 需要针对CPU特性进行专项定制库的场景,如Neon加速。 不建议使用NDK的场…...

网络安全-防火墙初步认识。
文章目录 1. 防火墙是什么?2. 防火墙的工作原理是什么?3. 防火墙的分类有哪些?4. 实战4.1 防火墙管理和实验介绍4.2 防火墙命令行初体验实验目标:实验步骤: 4.3 防火墙Web初体验实验目标:实验步骤ÿ…...

golang channel什么情况main会deadlock?主协程是什么?
在 Go 语言中,main 函数是程序的入口点,它运行在主协程(也称为主 goroutine)中。主协程是程序启动后自动创建的第一个 goroutine。当 main 函数执行完毕后,整个 Go 程序就会退出,无论其他 goroutine 是否仍…...

3个技巧让Sketch设计稿命名效率提升300%:Rename It插件终极指南
3个技巧让Sketch设计稿命名效率提升300%:Rename It插件终极指南 【免费下载链接】RenameIt Keep your Sketch files organized, batch rename layers and artboards. 项目地址: https://gitcode.com/gh_mirrors/re/RenameIt 想象一下这个场景:你刚…...

回表为什么慢:二级索引到聚簇索引、覆盖索引与“延迟关联”
目标:你能把“回表”解释成一个可量化的成本模型,并掌握两类实战优化:覆盖索引与延迟关联(先查主键再回表)。1. 先把概念说透:InnoDB 的两棵树 聚簇索引(主键 B 树):叶子…...

八大网盘直链提取终极指南:突破客户端限制的JavaScript神器
八大网盘直链提取终极指南:突破客户端限制的JavaScript神器 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 /…...

OpenMS终极指南:如何快速掌握专业质谱数据分析的完整方案
OpenMS终极指南:如何快速掌握专业质谱数据分析的完整方案 【免费下载链接】OpenMS The codebase of the OpenMS project 项目地址: https://gitcode.com/gh_mirrors/op/OpenMS 蛋白质组学、代谢组学、质谱数据分析、OpenMS开源平台、生物信息学工具 在生命科…...

FireRedASR Pro效果展示:长难句识别准确,抗噪能力惊艳
FireRedASR Pro效果展示:长难句识别准确,抗噪能力惊艳 1. 语音识别新标杆 在嘈杂的会议室里,一段夹杂着咳嗽声和键盘敲击的录音正在播放。令人惊讶的是,FireRedASR Pro几乎一字不差地将这段对话转换成了文字,连专业术…...

新手友好:无需配置环境,在快马平台编写第一行open claw控制代码
今天想和大家分享一个特别适合新手入门的Open Claw控制小项目。作为一个刚接触机器人控制的小白,我发现在InsCode(快马)平台上可以轻松实现机械爪的基础控制,完全不需要配置复杂的环境,特别适合零基础学习。 Open Claw是什么? Ope…...

从混乱到有序:ERP系统革新如何优化企业资源配置
ERP系统革新,助力企业资源配置达到最优状态在当今竞争激烈的商业环境中,企业要想脱颖而出,实现可持续发展,高效的资源配置是关键。而ERP(企业资源计划)系统的革新,正成为众多企业提升资源配置效…...

CA6140车床杠杆831009钻M6孔夹具设计全套带图
CA6140车床作为机械加工领域的经典设备,其杠杆零件(编号831009)的加工精度直接影响整机性能。针对该零件M6螺纹孔的加工需求,专用夹具的设计需兼顾定位稳定性、操作便捷性与加工经济性。通过分析零件结构可知,杠杆两端…...

如何对比 SEO 优化公司的服务
了解 SEO 优化公司的服务 在当今数字化时代,SEO(搜索引擎优化)已经成为了企业在互联网上获得曝光和流量的重要手段。选择一家合适的SEO优化公司,对于提升网站排名和增加业务机会至关重要。如何对比SEO优化公司的服务呢࿱…...

Cache 维护实战:深入理解 ARMv8-A 架构下的 Invalidate 与 Clean 操作
1. 为什么需要关注Cache维护? 在嵌入式开发中,Cache就像是你办公桌上的文件架。当你频繁访问某些数据时,CPU会把这些数据放在Cache里,就像把常用文件放在手边一样。但问题来了:如果文件内容更新了(比如内存…...