Arduino开源四足蜘蛛机器人制作教程
视频教程:手把手叫你做四足蜘蛛机器人——1零件介绍_哔哩哔哩_bilibili
一、项目介绍
1.1 项目介绍
Arduino主控,图形化编程,趣味学习
Arduino nano开发板+舵机扩展底板
4.8V可充电电池,支持Arduino C语言编程和米思齐图形化编程
开源代码,注释详细,运动学解算。

1.2 资料介绍
代码仓库资料链接:Baize_Spider12: 一个四足蜘蛛机器人 - Gitee.com
根目录如下图所示,资料里面一共有6个文件夹,还有一个“Baize_spider入门级制作教程.pdf” 的文件,这个pdf文件是整个机器人制作的指导教程。

接着介绍一下这六个文件夹里面存储的文件:
1.3D模型文件——存储的是3D打印的文件,
2.组装调试视频教程——存储的是机器人的组装调试视频教程文件。
3.程序代码文件——存储的是机器人的程序代码。
4.安卓手机遥控APP——存储的是安卓手机遥控APP的安装包。
5.win10驱动程序——存储的是机器人主板的windows驱动驱动工具。
7.图片和视频——存储的是机器人相关图片和视频。
接下来详细介绍各个文件夹内部各个文件的作用。
- 3D模型文件

下图为文件夹“1.3D模型文件”里面的部分文件,STL后缀的文件是3D打印图纸,jpg后缀的文件是这个零件的图片,3mf文件是这个零件的stl图纸经过拓竹切片后的文件。

2. 组装调试视频教程
整个组装调试教程如下图所示:

3程序代码文件
程序代码文件目录如下:
 主要包括调试及测试程序,主程序和接线图。
主要包括调试及测试程序,主程序和接线图。
测试及调试程序下面有三个程序文件,FaceAngry这个程序可以让显示屏显示愤怒的表情,OledMovingEyes这个程序可以显示一个机器人眼睛左右移动,tiaoshi程序主要用于机器人的关节标定时校准位置。
主程序下面有两个程序,BaizeSpider12-minimal程序是我们的主程序,BaizeSpider12-screen这个程序可以在机器人行走过程中显示表情。
下面是两个主程序的区别,右边这个带表情显示

二、Baize_Spider12机器人组装
2.1 零件准备(零件清单)
全部零件如下图所示:

零件清单
| 品名 | 数量 | 链接 |
| 身体上板 | 1个 | |
| 身体中板 | 1个 | |
| 身体下板 | 1个 | |
| 关节链接件 | 4个 | |
| 大腿 | 4个 | |
| 小腿 | 4个 | |
| 头部舵机座 | 1个 | |
| 显示屏头前壳 | 1个 | |
| 显示屏头后壳 | 1个 | |
| 超声波头前壳 | 1个 | |
| 超声波头后壳 | 1个 | |
| MG90S舵机 | 15个 | 链接 |
| Arduino nano主控 | 1个 | |
| 超声波 | 1个 | 链接 |
| 母对公杜邦线 | 1*4pin | |
| 母对母杜邦线 | 1*4pin | |
| 显示屏 | 1个 | |
| 主控板底板 | 1个 | |
| 电源线 | 1个 | |
| 蓝牙 | 1个 | |
| 电池 | 1个 | |
| 固定轴连接件 | 10个 | |
| 充电线 | 1个 | |
| 程序下载线 | 1个 | |
| M3*12蘑菇头螺丝 | 4个 | |
| M3*4沉头螺丝 | 4个 | |
| M3*15蘑菇头螺丝 | 4个 | |
| M2.5*5平头螺丝 | 34个 | |
| 束线带 | 0.5米 |
2.2 组装教程
请观看视频组装调试教程,下面是与视频相对应的图文教程。
哔哩哔哩:
https://www.bilibili.com/video/BV1Cx4y147Sk/?spm_id_from=333.788&vd_source=907d18ed27ea83b7920d5cd4bd8db784
2.2.1 身体组装
身体组装需要的零件如图2-2-1(a)所示:

图2-2-1(a)

图2-2-1(b)

图2-2-1(c)
 图2-2-1(d)
图2-2-1(d)
 图2-2-1(e)
图2-2-1(e)
 图2-2-1(f)
图2-2-1(f)
 图2-2-1(g)
图2-2-1(g)

图2-2-1(h)

图2-2-1(i)

图2-2-1(j)

图2-2-1(k)

图2-2-1(l)

图2-2-1(m)

图2-2-1(n)
2.2.2 组装关节连接件

图2-2-2(a)

图2-2-2(b)

图2-2-2(c)

图2-2-2(d)
2.2.3 去除大腿支撑

图2-2-3(a)

图2-2-3(b)
2.2.4 组装小腿

图2-2-4(a)

图2-2-4(b)

图2-2-4(c)
2.2.5 组装身体

图2-2-5
2.3 舵机接线
我们用的开发板是arduino nano,那么接线图如下所示:

图2-3
三、Baize_Spider12机器人程序烧录调试
3.1 为你的电脑安装Arduino IDE
访问下面下载链接,然后点击软件下载:
链接:https://pan.baidu.com/s/1qwpNW6-PlzSQkgbYCBsoBg
提取码:d4xq
--来自百度网盘超级会员V1的分享
接着双击exe程序一路安装即可。
3.2 安装驱动
3.3 关节标定
下面这个代码上传到机器人之后,机器人的所有关节舵机都会转到90度。

图3-3-1
然后,按照下面的姿态固定关节舵机的摇臂。

图3-3-2
3.4 烧录代码并简单测试
接下来烧录代码,我们打开如下图所示“BaizeSpider12-minimal”的文件夹。

图3-4-1
打开文件夹之后,选择相如下图所示的程序。

图3-4-2
这里我们选择arduino nano,我们的主控板如下图中第一块蓝色板子所示。

图3-4-3
打开程序后如下图所示,接着来上传代码(上传代码前,机器人也要先连接电池通电才行,接着再用数据线连接机器人与电脑):

四、Baize_Spider12机器人手机APP遥控配置
4.1 安装配置手机APP进行遥控
1.机器人接通电源以后,首先按一下复位键,让舵机都归位,由于可能受到干扰,极少情况舵机可能出现角度未归位,因此需要提前按一下复位(reset)键。
复位键如下图所示:

图4-1-1
2.安装好蓝牙调试器,这个软件我们是用于控制机器人的,具体操作如下。
如果是华为手机或者荣耀手机,直接再应用市场搜索“蓝牙调试器”就可以在官方安装比较方便。

图4-1-2
如果是其他安卓手机的话,我们可以到我给的资料里面找到4.Adnroid APP文件夹,里面有“蓝牙调试器.apk”,找到这个文件之后单击一下,基本就可以开始安装了。

图4-1-3
3.安装成功之后,我们启动软件
如下图,软件会询问是否开启蓝牙,然后选择允许开启就行。

图4-1-4
4.接着,我们用手机连接机器人,当未连接设备时,左上角会显示未连接设备,一般进入软件会自动搜索设备,如果没有自动搜索的话,我们点击一下中间靠近下方的那个按钮,可以开始扫描。

图4-1-5
5.然后我们可以在软件界面看到Baize的蓝牙,点击后面的加号进行连接即可。密码是:953598

图4-1-6
6.通过对话模式或者按钮控制方式控制机器人。
在对话模式发送控制指令可以控制机器人:
以下为具体指令:
a - 前进
b - 后退
c- 左转
d - 右转
e – 停止
f – 坐下
g – 挥手
h – 抖手
i – 起立
或者通过按钮模式进行控制:

图4-1-7
点击右下角的编辑按钮,开始编辑每个按钮的提示和发送的指令,如下图所示:

图4-1-8
完成之后就可以控制机器人了。
4.2 自己编程让机器人前后左右运动
五、其他项目
Baize_H1mini六足机器人制作教程(开源)_六足机器人制作详细教程-CSDN博客
相关文章:
Arduino开源四足蜘蛛机器人制作教程
视频教程:手把手叫你做四足蜘蛛机器人——1零件介绍_哔哩哔哩_bilibili 一、项目介绍 1.1 项目介绍 Arduino主控,图形化编程,趣味学习 Arduino nano开发板舵机扩展底板 4.8V可充电电池,支持Arduino C语言编程和米思齐图形化编程…...

【Axure高保真原型】中继器表格——标签使用情况案例
今天和大家分享中继器表格——标签使用情况案例的原型模板,效果包括: 模糊搜索——输入标签编号或者标签名称,可以快速查找对应的数据 排序——点击排序按钮,可以按升序或降序排列 分页——点击上拉列表,可以选择表格…...

ABAP字符串反转 and 寻找字符所在位置 and 根据数量汇总时把数量转为非数值类型
1.字符串反转 and 寻找字符所在位置 LOOP AT gt_wlmc ASSIGNING FIELD-SYMBOL(<fs_wlmc>). "遍历内表<fs_wlmc>-matnr <fs_wlmc>-matnr(8).DATA: l_output TYPE char50,v_off2 TYPE i,str TYPE i,str2 TYPE i.CALL FUNCTION STRING_REVERS…...

【机器学习第十二章——计算学习理论】
机器学习第十二章——计算学习理论 12.计算学习理论12.1 基础知识12.1 可能学习近似正确假设(PAC)12.3 有限假设空间12.4 VC维 12.计算学习理论 12.1 基础知识 从理论上刻画了若干类型的机器学习问题中的困难和若干类型的机器学习算法的能力 这个理论要…...

Docker私人学习笔记
俗话说“好记性不如烂笔头”,编程的海洋如此的浩大,养成做笔记的习惯是成功的一步! 此笔记主要是antlr4.13版本的笔记,并且笔记都是博主自己一字一字编写和记录,有错误的地方欢迎大家指正。 一、基础概念:…...

谷粒商城实战笔记-233~235-商城业务-认证服务-单点登录流程-原理
文章目录 一,场景二,单点登录流程 一,场景 包含以下三节的内容: 一,233-商城业务-认证服务-单点登录流程-1二,233-商城业务-认证服务-单点登录流程-2三,233-商城业务-认证服务-单点登录流程-3…...

机器学习在旅游业的革新之旅
机器学习在旅游业的革新之旅 随着科技的飞速发展,尤其是人工智能(AI)技术的广泛应用,各个行业都迎来了前所未有的变革。其中,旅游业作为全球经济的重要支柱之一,更是受益匪浅。机器学习(Machin…...
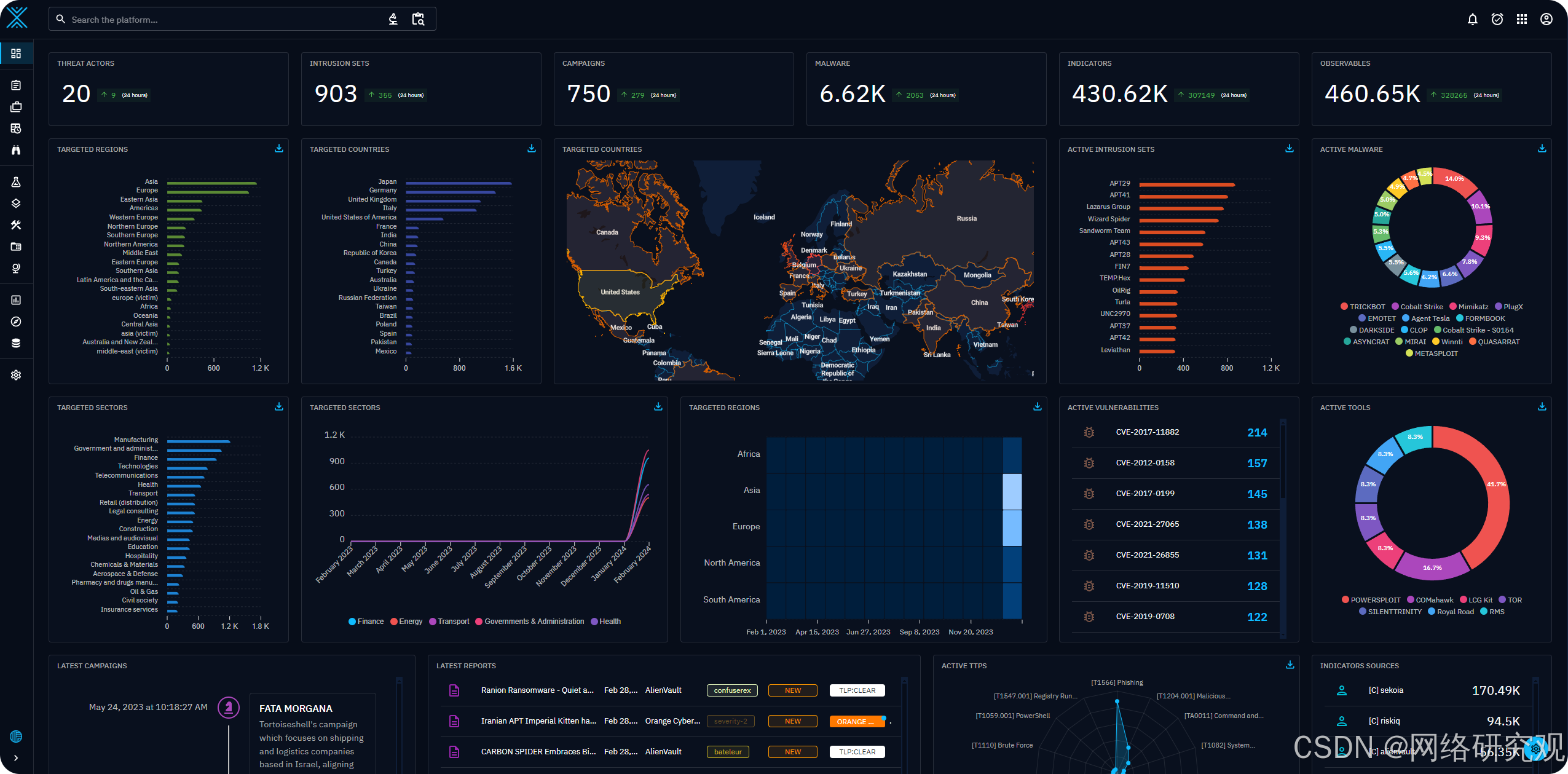
OpenCTI:开源网络威胁情报平台
OpenCTI 是一个开源平台,旨在帮助组织管理其网络威胁情报 (CTI) 数据和可观察数据。 该平台由 Filigran 开发,使用基于 STIX2 标准的知识模式构建数据。 它采用现代 Web 应用程序架构,配备 GraphQL API 和用户友好的前端。 OpenCTI 与 MIS…...

linux shell 脚本 let 数学计算
linux shell 脚本 let 数学计算 http://www.codebaoku.com/it-shell/ let命令中的算术表达式必须用双引号括起来,以避免解释器对特殊字符进行处理。 在变量的计算中,不需要使用$符号来表示变量, #!/bin/shweek_daydate %u echo $week_day…...
mp3和mp4的区别是什么?怎么把mp3转成mp4?(全)
在生活中我们或多或少会听到“mp3”和“mp4”,那么什么是mp3和mp4呢?mp3和mp4的区别是什么?mp3是一种音频压缩技术,旨在在不显著牺牲音质的前提下减小音频文件的体积,使其适用于音乐和其他音频内容的存储与传输。相比之…...

合并params和query参数
场景:三级分类只有query参数,搜索框使用params参数。为了解决这个问题,文中在typeNav的index.vue和Head/index.vue分别进行了判断和处理,确保在不同的路径下合并params和query参数能正确合并并传递。 如何当点击联动框时跳转到se…...
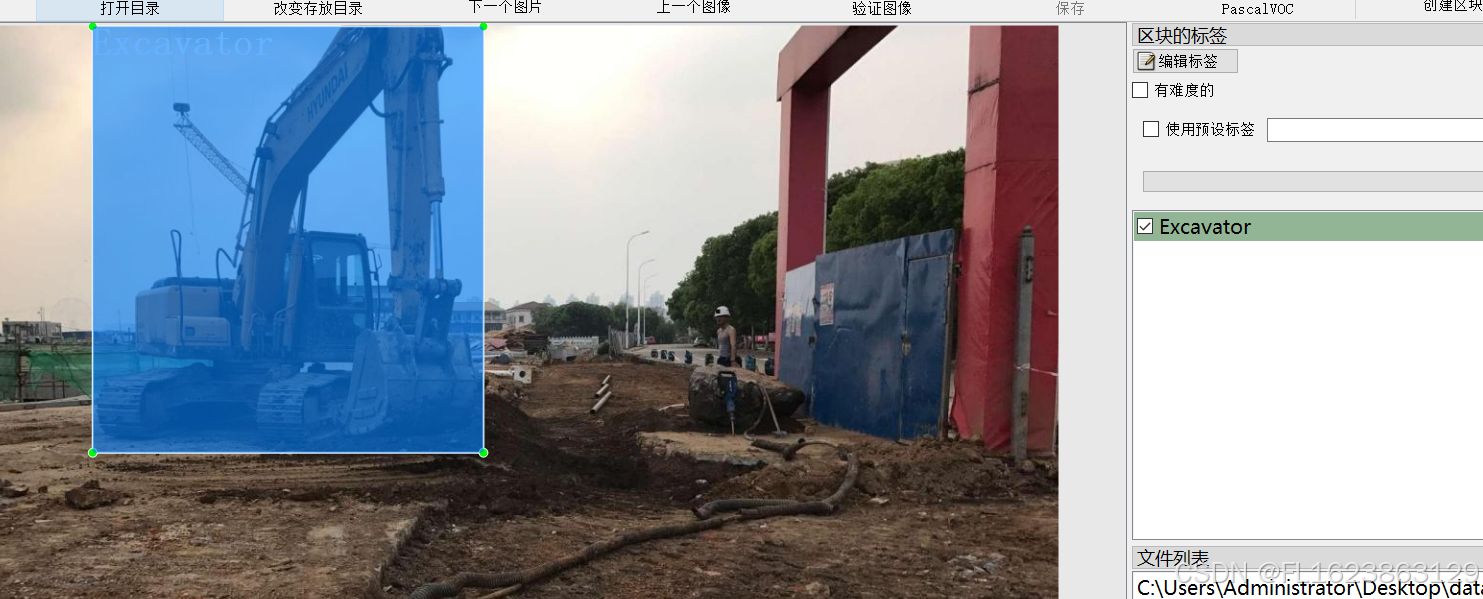
[数据集][目标检测]工程机械车辆检测数据集VOC+YOLO格式3189张10类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):3189 标注数量(xml文件个数):3189 标注数量(txt文件个数):3189 标注…...

构建域名服务器-BIND:Linux端的安装过程及配置文件详解
文章目录 构建域名服务器工具-BINDBIND的安装BIND配置文件详解1. /etc/named.conf:2. /etc/named.rfc1912.zones:3. /var/named/named.localhost:4./etc/logrotate.d/named5./etc/named.iscdlv.key6./etc/named.root.key7./etc/rndc.conf8./e…...

linux查询目录文件基础操作
基础命令 展示所有目录 ls 长格式列出(显示文件权限、所有者、大小和最后修改时间): ls -l 忽略大小写查询 ls | grep -i name 查找特定名称的文件: find /path/to/search -name "filename" 忽略大小写查找文件&#…...
搭建TestBench,收藏这几条基本框架就够了
Verilog功能模块HDL设计完成后,并不代表设计工作的结束,还需要对设计进行进一步的仿真验证。掌握验证的方法,即如何调试自己的程序非常重要。在RTL逻辑设计中,要学会根据硬件逻辑来写测试程序即写Testbench。Verilog测试平台是一个…...

怎么利用住宅代理提高数据抓取效率
在大数据时代,数据抓取已经是从互联网收集数据的关键手段,得到了广泛的应用。不论是网络营销、电商平台、或者是新闻网站,数据抓取都可以帮助企业或者是个人收集到大量的数据。但是随着反爬虫技术的不断发展,传统的爬虫方法已经不…...

c#中的ManuaResetEvent
在C#中,ManualResetEvent 是一个同步事件,用于线程间通信。它允许一个或多个等待的线程等待某个事件的发生。当事件被设置为已发生(或称为“信号”)状态时,所有等待的线程都会被释放,并且可以继续执行。 以…...

EE trade:黄金投资的利弊与要点
黄金投资作为一种相对传统的投资途径,存在着特定的优势与风险。接下来详细剖析一下黄金投资的优缺点。 1、黄金投资的优点 有效对抗通货膨胀 在通货膨胀时期,黄金往往能有出色的表现,其价值通常会上升,如此一来便能够为投资者提…...

数据仓库模型评估的标准
面试中,肯定有数仓同学被问到:数据模型如何去评估、如何优化,那今天就聊一聊这个话题。 基本概念 模型:表达的是某一个主题、某一个业务过程,赋值业务价值,最终落地还是一个建表的过程 数仓模型…...

121231
实打实大苏打...

工程化AI编程:claude-code-blueprint项目实战与最佳实践
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫“claude-code-blueprint”,作者是lethilu4796。乍一看这个标题,你可能会觉得这又是一个普通的代码生成工具或者AI辅助编程的脚本。但当我深入研究了它的源码和使用方式后&…...
缺2019)
孔子学院年度报告(2006-2024)缺2019
2024年是孔子学院成立20周年,全球孔子学院以“20岁,孔子学院正青春”为主题,在教育教学、文化交流、数字化建设等多方面取得丰硕成果,持续成为中外语言互通与文明互鉴的重要桥梁。截至2024年底,全球161个国家和地区已设…...

ChatALL:一站式聚合主流AI模型,实现高效横向对比与评估
1. 项目概述:一个能同时“拷问”所有主流AI的聚合神器最近在折腾各种大语言模型,从ChatGPT、Claude到国内的文心一言、通义千问,再到开源的Llama、DeepSeek,每个都有自己的特长和脾气。但每次想对比不同模型对同一个问题的回答&am…...

5分钟掌握Windows和Office激活:KMS_VL_ALL_AIO完整指南
5分钟掌握Windows和Office激活:KMS_VL_ALL_AIO完整指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为电脑上的Windows系统或Office软件提示"需要激活"而烦恼吗&am…...

基于 ESP32-S3 的四博AI双目智能音箱方案:0.71/1.28双目光屏、四路触控、三轴姿态、震动马达、语音克隆与专属知识库接入
基于 ESP32-S3 的四博AI双目智能音箱方案:0.71/1.28双目光屏、四路触控、三轴姿态、震动马达、语音克隆与专属知识库接入1. 方案概述四博AI双目智能音箱方案是一套基于 ESP32-S3 / ESPS3-32 / ESPS3-32E 的多模态AI硬件平台。它不是普通智能音箱,而是把 …...

API数据与自建数据库同步:CDC+ETL的实时数据管道
在电商、跨境业务、微服务架构等实际业务场景中,系统普遍面临多平台 API 数据源杂乱、自建数据库数据滞后、手工同步易出错、批量离线同步时效性差等痛点。第三方平台开放 API、业务系统接口、供应链数据接口源源不断产生增量数据,而企业自建 MySQL、Pos…...

R公司摆线针轮减速机装配线优化【附代码】
✨ 长期致力于装配线优化、多目标优化、改进粒子群算法、Flexsim仿真研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于工业工程的装配线瓶颈识别与…...

实测Taotoken多模型聚合服务的响应延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测Taotoken多模型聚合服务的响应延迟与稳定性表现 在将大模型能力集成到实际应用时,开发者不仅关注模型的功能与成本…...

有限元分析前传:不懂‘最小势能原理’和‘自然边界条件’?从变分法开始说清楚
有限元分析前传:从变分法到最小势能原理的工程实践指南 在ANSYS或Abaqus中点击"求解"按钮时,软件究竟在背后执行什么数学魔法?许多工程师能熟练操作CAE界面,却对弹窗中"势能最小化计算中"的提示感到困惑。当我…...

如何实现数字孪生在智慧建筑中的应用?
一、搭建建筑数字底座以BIM 建筑信息模型为核心,对楼宇结构、楼层房间、机电设备、地下管网进行1:1 三维精细化建模,并完成模型轻量化处理,构建建筑全域三维数字底盘。二、多源感知数据接入在建筑内部部署温湿度、烟感、门禁、摄像头、水电表…...