IMU助力JAXA空间站机器人
近日,日本宇宙航空研究开发机构(JAXA)宣布,在国际空间站(ISS)实验舱“希望号”(Kibo)上部署的一款移动摄像机器人将采用Epson M-G370系列惯性测量单元(IMU)。IMU是一种能够检测物体运动状态的装置,通过测量加速度和角速度来确定物体的空间位置和姿态。这种技术对于在缺乏固定参照物的空间环境中尤为重要。
自2023年6月以来,“内部球形相机2号”(Internal Ball Camera 2)已经在“希望号”实验舱内进行了功能性验证。这款自由飞行的摄像机器人作为一款机载无人机,由地面控制中心远程操控,可在空间站内部自由移动。它设计用于自动离站执行任务,并在完成后自主返回充电站进行电池充电。

在微重力环境中,机器人必须精确地估计自身的位置(沿X、Y、Z轴)和旋转姿态(俯仰、偏航、滚转)。通过结合视觉同时定位与地图构建(VSLAM)技术和Epson M-G370系列IMU的数据,该机器人成功实现了这一目标。这一技术组合使得机器人能够在没有明显地标的空间站内部准确导航。

Epson M-G370系列IMU凭借其小巧轻便的设计和卓越的精度,成为助力机器人在飞行过程中准确估算空间位置和旋转姿态的理想选择。其主要特点包括:
- 高精度和出色的稳定性:配备Epson原创的晶体陀螺仪传感器,确保了在极端环境下的可靠运行。
- 低陀螺仪偏差:陀螺仪偏差不稳定度低至0.8°/√h,角度随机游走范围在0.06至0.03°/√h之间,保证了高度的测量准确性。
- 体积小巧:重量仅有10克,便于集成到各种小型设备中。
- 低功耗设计:工作电压为3.3V,电流消耗仅为16mA,适合长时间运行任务。
这些特点使得Epson IMU非常适合在资源有限且要求高性能的空间任务中使用。

此次Epson IMU被JAXA选中,不仅彰显了其在航天领域的卓越性能,还为未来空间探索任务提供了可靠的技术保障。随着技术的不断进步,IMU 在航天领域的应用将会更加广泛,为人类的太空探索活动带来更多可能性。未来,我们可以期待看到更多先进的 IMU 技术应用于各类航天器,推动空间科学的发展。
相关文章:
IMU助力JAXA空间站机器人
近日,日本宇宙航空研究开发机构(JAXA)宣布,在国际空间站(ISS)实验舱“希望号”(Kibo)上部署的一款移动摄像机器人将采用Epson M-G370系列惯性测量单元(IMU)。…...

java开发,记录一些注解和架构
最近接了一个项目,说是项目其实也不算是项目,因为是把这个项目赛到其他项目中的。 熟悉一些这个项目的功能,梳理了一下,在代码开发中主要关心pojo、entity、respository、controller、service。 在这里主要记录前3个的流程与作用…...

【2024高教社杯全国大学生数学建模竞赛】B题 生产过程中的决策问题——解题思路 代码 论文
目录 问题 1:抽样检测方案的设计问题 2:生产过程中的决策问题 3:多工序、多零配件的生产决策问题 4:重新分析次品率题目难度分析1. 统计检测方案设计的复杂性(问题 1)2. 多阶段生产决策的复杂性(…...

JUnit 5和Mockito进行单元测试!
1. JUnit 5 基础 JUnit 5是最新的JUnit版本,它引入了许多新特性,包括更灵活的测试实例生命周期、参数化测试、更丰富的断言和假设等。 1.1 基本注解 Test:标记一个方法为测试方法。 BeforeEach:在每个测试方法之前执行。 AfterEac…...

LeetCode 算法:完全平方数 c++
原题链接🔗:完全平方数难度:中等⭐️⭐️ 题目 给你一个整数 n ,返回 和为 n 的完全平方数的最少数量 。 完全平方数 是一个整数,其值等于另一个整数的平方;换句话说,其值等于一个整数自乘的…...

深入CSS 布局——WEB开发系列29
CSS 页面布局技术允许我们拾取网页中的元素,并且控制它们相对正常布局流、周边元素、父容器或者主视口/窗口的位置。 一、正常布局流(Normal Flow) CSS的布局基础是“正常流”,也就是页面元素在没有特别指定布局方式时的默认排列…...

视频的容器格式和编码格式详解
视频的容器格式和编码格式是视频文件的两个核心概念,它们相互关联但具有不同的功能。以下是详细的解释: 1. 容器格式 (Container Format) 容器格式,又称封装格式,指的是视频文件的外壳或容器,它用于封装视频、音频、…...
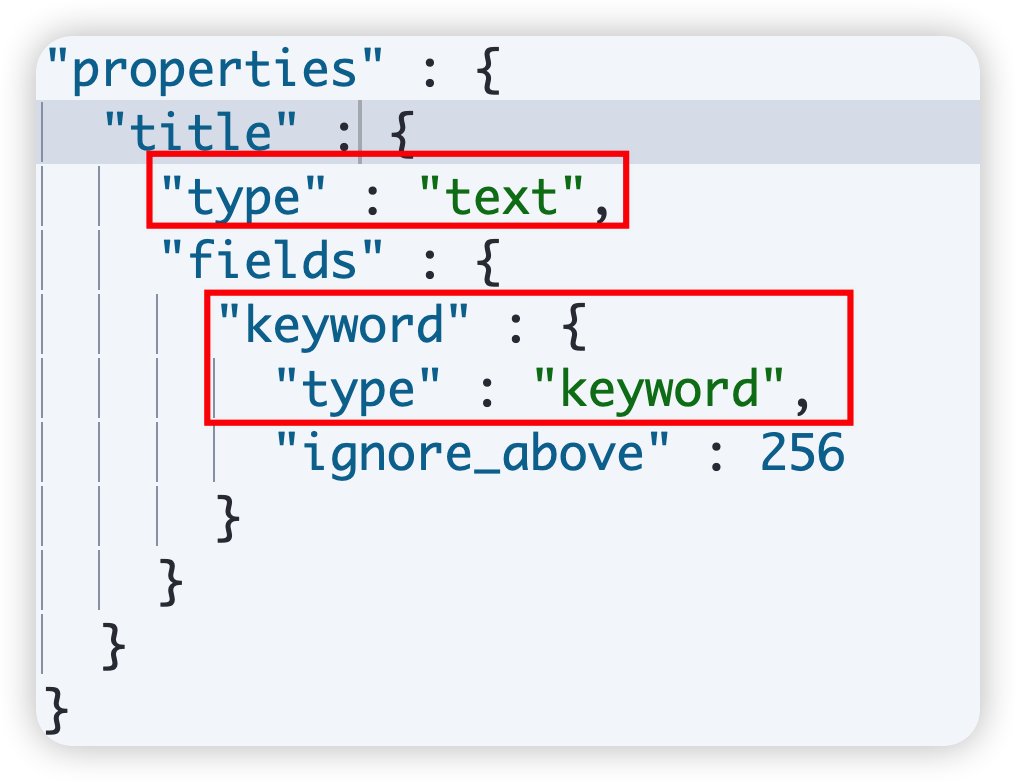
Elasticsearch Mapping 详解
1 概述 映射的基本概念 Mapping 也称之为映射,定义了 ES 的索引结构、字段类型、分词器等属性,是索引必不可少的组成部分。 ES 中的 mapping 有点类似与DB中“表结构”的概念,在 MySQL 中,表结构里包含了字段名称,字…...

WPF 利用视觉树获取指定名称对象、指定类型对象、以及判断是否有验证错误
1.利用视觉树获取指定名称对象 /// <summary> /// Finds a Child of a given item in the visual tree. /// </summary> /// <param name"parent">A direct parent of the queried item.</param> /// <typeparam name"T">T…...
`, `sub()`, `subn()`方法的作用)
了解`re`模块的`split()`, `sub()`, `subn()`方法的作用
在Python中,re模块(即正则表达式模块)提供了强大的字符串处理能力,允许你通过模式匹配来执行复杂的文本搜索、替换和分割等操作。其中,split(), sub(), 和 subn() 方法是re模块中非常实用的几个函数,它们各…...

机器学习交通流量预测实现方案
机器学习交通流量预测实现方案 实现方案 1. 数据预处理 2. 模型选择 3. 模型训练与评估 代码实现 代码解释 小结 🎈边走、边悟🎈迟早会好 交通流量预测是机器学习在智能交通系统中的典型应用,通常用于预测道路上的车辆流量、速度和拥…...

QNN:基于QNN+example重构之后的yolov8det部署
QNN是高通发布的神经网络推理引擎,是SNPE的升级版,其主要功能是: 完成从Pytorch/TensorFlow/Keras/Onnx等神经网络框架到高通计算平台的模型转换; 完成模型的低比特量化(int8),使其能够运行在高…...

Redis实战宝典:开发规范与最佳实践
目录标题 Key命名设计:可读性、可管理性、简介性Value设计:拒绝大key控制Key的生命周期:设定过期时间时间复杂度为O(n)的命令需要注意N的数量禁用命令:KEYS、FLUSHDB、FLUSHALL等不推荐使用事务删除大key设置合理的内存淘汰策略使…...

RPC的实现原理架构
RPC(Remote Procedure Call,远程过程调用)是一种允许程序调用位于不同地址空间或网络上的函数或方法的技术,尽管这些调用看起来像是本地调用。RPC 的实现极大地简化了分布式系统中的通信,避免了开发人员直接处理底层网…...

OpenXR Monado Hello_xr提交Frame
OpenXR Monado Hello_xr提交Frame @src/tests/hello_xr/openxr_program.cpp RenderFrame())xrWaitFrame(m_session, &frameWaitInfo, &frameState)xrBeginFrame(m_session, &frameBeginInfo)std::vector<XrCompositionLayerBaseHeader*> layers;std::vecto…...

huggingface快速下载模型及其配置
大家知道,每次进huggingface里面一个个手动下载文件然后再上传到我们的服务器是很麻烦的。其实huggingface提供了下载整个包的命令,很简单,如下: 1. 进入huggingface官网,随便搜索一个模型,点击右上角的三…...

虚幻5|不同骨骼受到不同伤害|小知识(2)
1.蓝图创建一个结构,B_BoneDamage 结构里添加一个浮点变量,表示伤害倍数 2.当我们创建了一个结构,就需要创建一个数据表格,数据表格可以选择对应的结构 不同骨骼不同倍数伤害,骨骼要对应骨骼网格体的名称 3.把我们br…...

达梦SQL 优化简介
目录 一、定位慢 SQL (一)开启跟踪日志记录 1.跟踪日志记录配置 (二)通过系统视图查看 1.SQL 记录配置 2.查询方式 二、SQL分析方法 (一)执行计划 1.概述 2.查看执行计划 (二&#x…...

题解:CF1070B Berkomnadzor
CF1070B Berkomnadzor 题解 解题思路 不难想到将 IP 地址转化为二进制后插入一个字典树中,转化后二进制的长度就是 x x x 的长度。我们需要记录每个串结尾的颜色,不妨设黑名单为 1 1 1,白名单为 0 0 0,初始时每个位置的颜色是…...

shell 学习笔记:数组
目录 1. 定义数组 2. 读取数组元素值 3. 关联数组 4. 在数组前加一个感叹号 ! 可以获取数组的所有键 5. 在数组前加一个井号 # 获取数组的长度 6. 数组初始化的时候,也可以用变量 7. 循环输出数组的方法 7.1 for循环输出 7.2 while循环输出 7.2.1 …...

一篇文章带你了解MyBatis!!!
一、引言在之前提到的三层架构:控制层controller、业务层service、持久层dao,里面的持久层,顾名思义:承担了数据持久化的核心职责;这篇文章讲述的是常用的持久层框架---MyBatis二、入门程序准备工作:创建sp…...

2025最权威的六大AI论文网站推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 在当下的学术研究环境里头,若是合理地运用AI写作工具,那么能够有效地…...

AI终于学会“动手”了:让ToClaw在高铁上帮我干活
在高铁上,我让 AI 帮我把电脑上的活干完了 上周出差,高铁上突然收到老板消息:「那份数据表记得今天下班前发我。」 我人在车上,电脑却留在公司。按以前,这事基本没戏——要么改签提前回去,要么硬着头皮说「…...
)
树莓派4B学习笔记——IO通信篇(SPI)
文章目录SPI协议简介树莓派4B1.3寸OLED(SPI协议)1.3寸OLED简介接线图开启树莓派SPI接口wiringPiSPI库简介C语言实现(汉字、字符、数字、图片显示)Python实现总结树莓派4B入门学习笔记汇总SPI协议简介 SPI(Serial Peripheral inte…...

终极GPU多应用共存指南:AITemplate资源隔离最佳实践
终极GPU多应用共存指南:AITemplate资源隔离最佳实践 【免费下载链接】AITemplate AITemplate is a Python framework which renders neural network into high performance CUDA/HIP C code. Specialized for FP16 TensorCore (NVIDIA GPU) and MatrixCore (AMD GPU…...

突破单车智能瓶颈:DAIR-V2X车路协同系统全栈实践指南
突破单车智能瓶颈:DAIR-V2X车路协同系统全栈实践指南 【免费下载链接】DAIR-V2X 项目地址: https://gitcode.com/gh_mirrors/da/DAIR-V2X 在自动驾驶技术的发展历程中,单车智能正面临难以逾越的感知边界。当车辆行驶至复杂路口或遭遇恶劣天气时&…...

PoeCharm:用数据驱散《流放之路》构建迷雾,让每个玩家都能成为build大师
PoeCharm:用数据驱散《流放之路》构建迷雾,让每个玩家都能成为build大师 【免费下载链接】PoeCharm Path of Building Chinese version 项目地址: https://gitcode.com/gh_mirrors/po/PoeCharm PoeCharm作为Path of Building的中文增强版…...

革新性桌面信息聚合方案:TrafficMonitor插件全维度应用指南
革新性桌面信息聚合方案:TrafficMonitor插件全维度应用指南 【免费下载链接】TrafficMonitorPlugins 用于TrafficMonitor的插件 项目地址: https://gitcode.com/gh_mirrors/tr/TrafficMonitorPlugins 你是否经常在工作时需要同时打开多个监控窗口?…...

高阶 HDI 同行参考:40 层>5 阶 HDI 技术难点
【实战复盘】19 天拿下 40 层>5 阶板的工艺 项目管理方案 标签:高阶HDI、激光钻孔、电镀均匀性、多次压合最近刚完成一款40层且大于5阶的高阶HDI项目。坦白说,这板子难度不小:多次压合对位、激光钻孔一致性、电镀填孔均匀性&…...

cv_resnet50_face-reconstruction效果可视化:热力图分析重建误差分布与关键面部区域精度
cv_resnet50_face-reconstruction效果可视化:热力图分析重建误差分布与关键面部区域精度 你是不是也好奇,一个人脸重建模型到底“重建”得怎么样?它能把你的五官还原得一模一样吗?眼睛、鼻子、嘴巴这些关键部位,哪个重…...