004: VTK读入数据---vtkImageData详细说明
VTK医学图像处理---vtkImageData类
目录
VTK医学图像处理---vtkImageData类
简介:
1 Mricro软件的安装和使用
(1) Mricro安装
(2) Mricro转换DICOM为裸数据
2 从硬盘读取数据到vtkImageData
3 vtkImageData转RGB或RGBA格式
4 练习
总结
简介:
对于医学图像来说,vtkImageData是使用频率非常高的类,因为医学图像通常为较为规则的矩形或容积类型(三维),而vtkImageData类主要就是用于存储此类数据的,vtk中相关算法(比如阈值、缩放等)的输入和输出也是vtkImageData类,熟练掌握vtkImageData类非常重要。
vtkDICOMImageReader类读取文件夹中的DICOM文件后,DICOM数据也存储在vtkImageData类中,本篇博文将跳过vtkDICOMImageReader类,直接从硬盘读取数据到vtkImageData类中,以增强大家对vtkImageData类的熟悉。
由于DICOM格式非常负责,有专门的开源库对DICOM文件进行解析,比如DCMTK(DCMTK - dicom.offis.de),我们不打算详细介绍DICOM标准,因此我们将借助一个免费的软件Mricro(建议大家学会使用给软件,不管是开发还是做科研都非常有用)来将DICOM文件转换为原始数据,采用C语言从硬盘读取原始数据到vtkImageData类中。
本博文主要包括为 Mricro的安装和使用,从硬盘读取数据到vtkImageData类,vtkImageData类的详细介绍。
1 Mricro软件的安装和使用
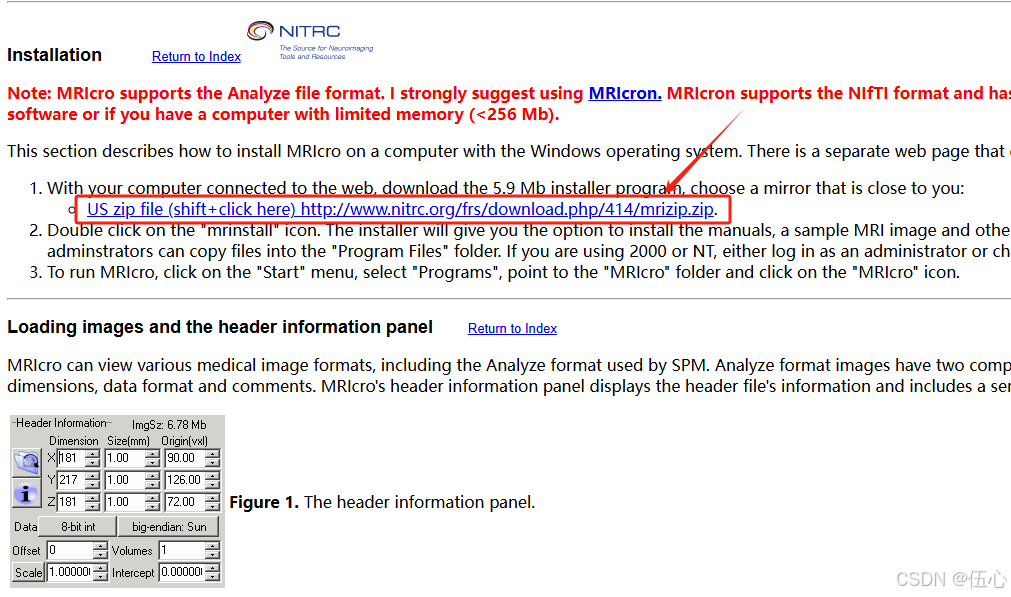
下载地址:MRIcro software guide (sc.edu)
打开网页后,点击下图中红色方框中的链接开始下载。
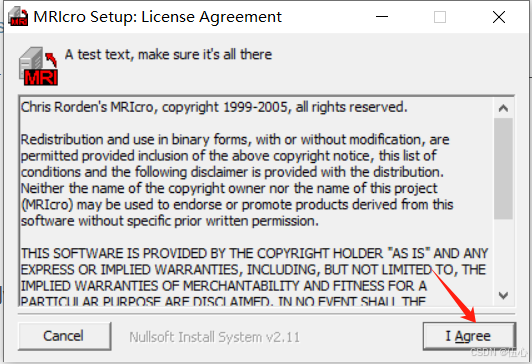
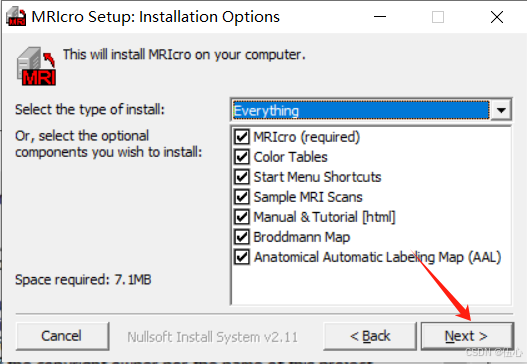
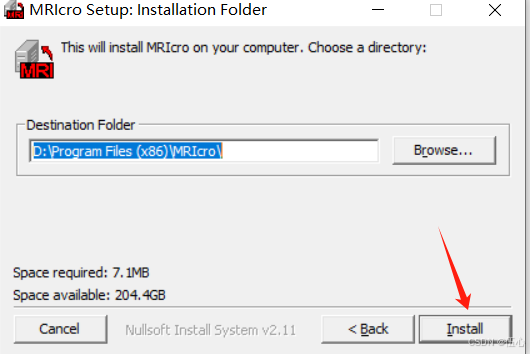
(1) Mricro安装
下载后,解压会看到下面的图标,双击安装,提出是否安装,选择是,一路默认安装,详细步骤如下图:

(2) Mricro转换DICOM为裸数据
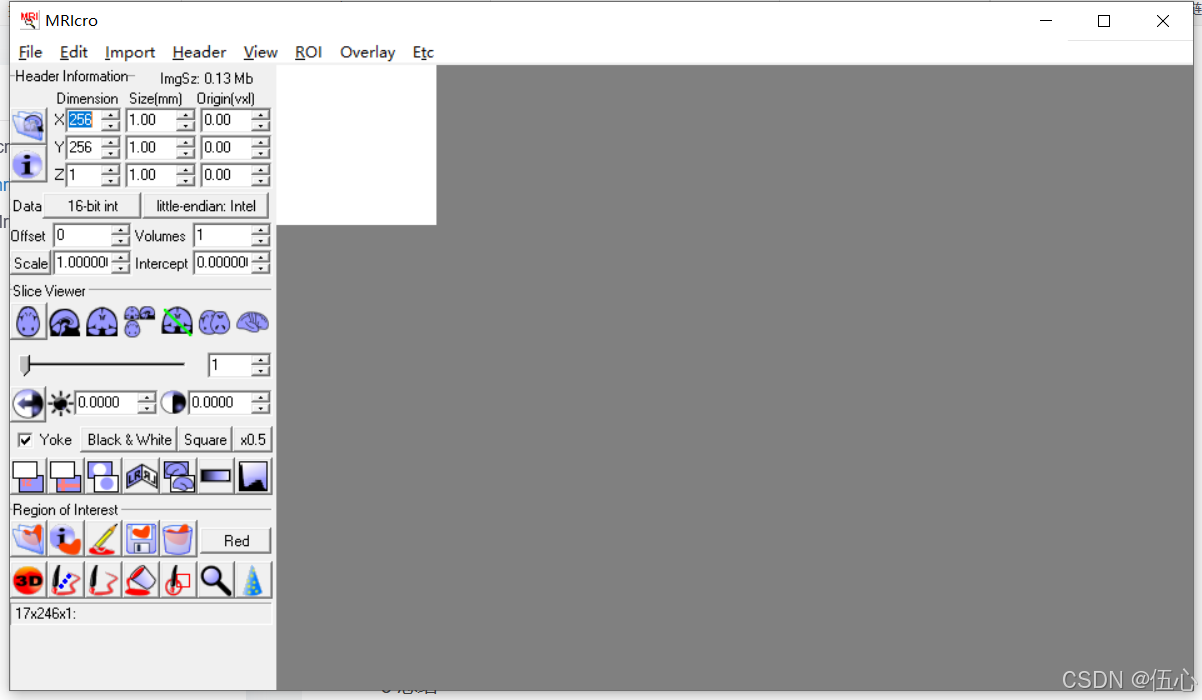
在开始栏中搜索Mricro,或从所有应用程序里面找到Mricro启动,启动后的界面为:
DICOM数据下载地址:【免费】VTK-医学图像处理博文中需要的DICOM测试数据资源-CSDN文库
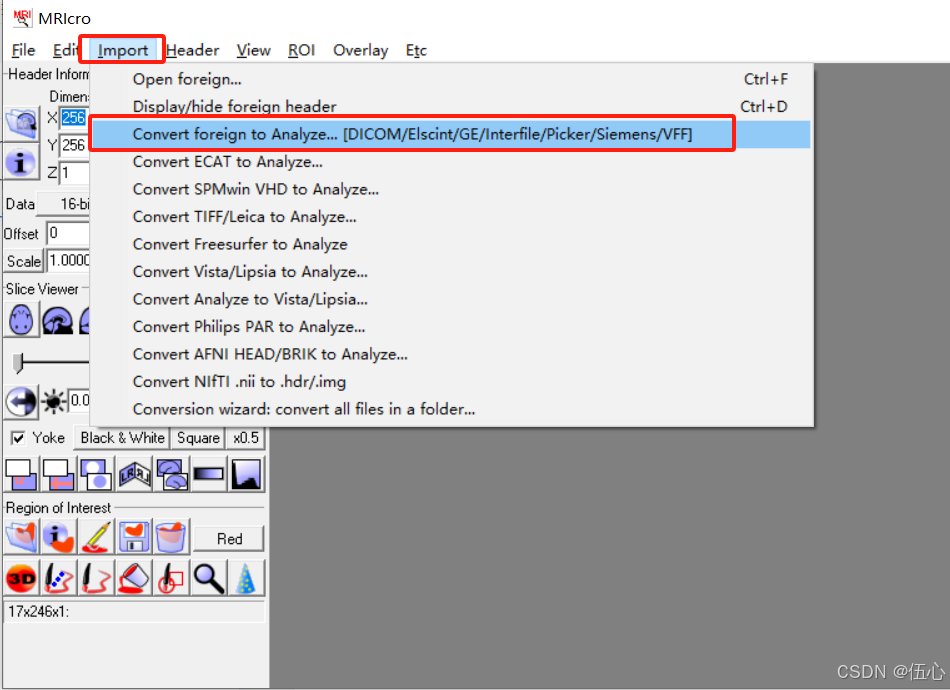
下载DICOM数据解压,在Mricro软件的菜单项中选择 Import--Convert foreign to Analyze,跳出选择对话框。
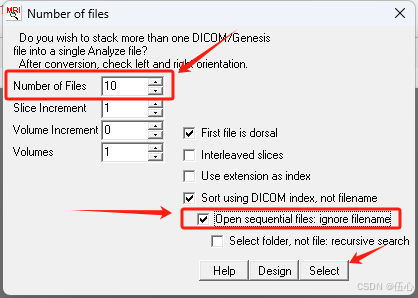
在Number of Files中要输入待转换的DICOM文件张数, 例如这里我们转换10张,就在该输入框内填写10,记得勾选 Open sequential files:ignore filename选项,然后点击 Select。
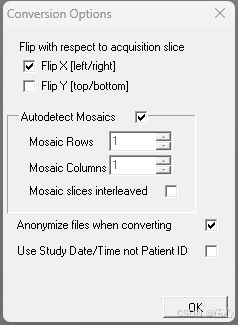
在Conversion Options框中,继续点击 OK
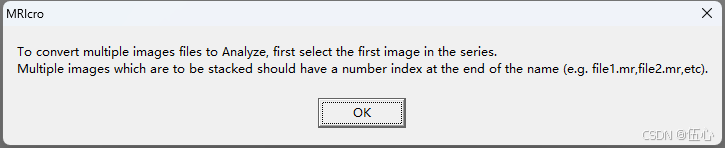
这里有时候会跳出一个或两个提示框,不用管它,点击OK继续

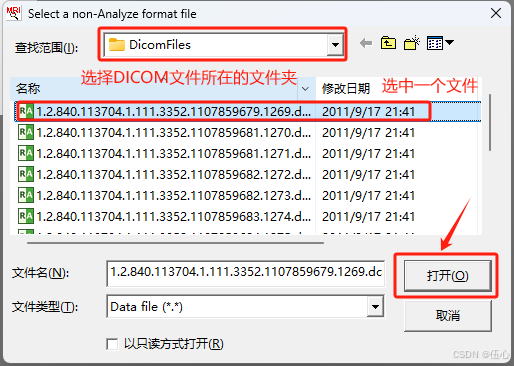
到 Select 对话框后,随便选中一张待转换的DICOM文件,然后再文件名中输入要保存为裸数据的名称,点击 打开。
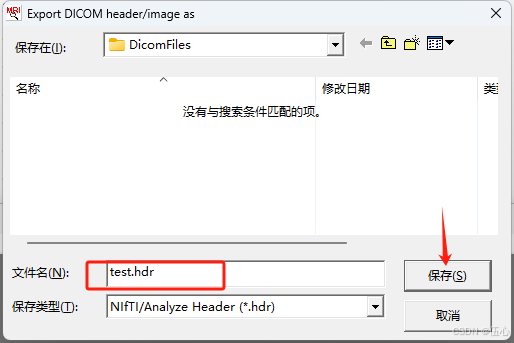
单击 打开后,会跳出导出保存框,在保存框中输入要保存的名称,点击 保存按钮进行保存。
打开DicomFiles所在文件夹,会发现里面多了两个文件:test.hdr和 test.img
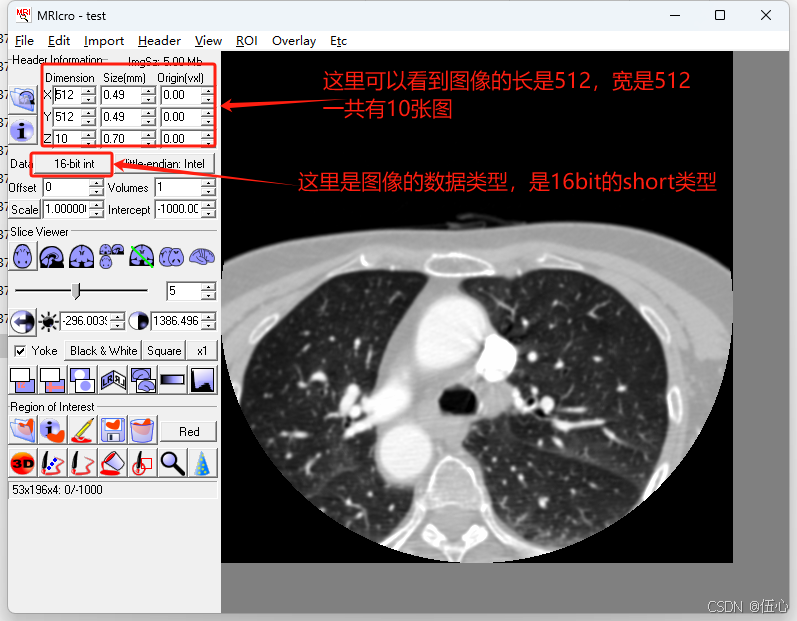
其中 test.hdr文件中保存的数据的长宽高,空间位置等信息
test.img文件中就是纯粹的裸数据,接下来我们将读取test.img中的数据到vtkImageData中。
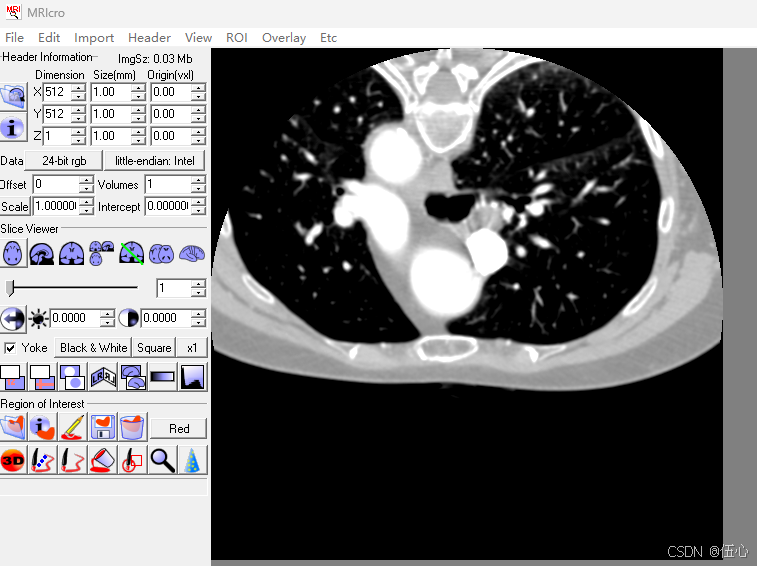
双击test.hdr,用Mricro软件打开它,在软件的左侧,可以看到test.img中的数据长为512,宽为512,一共有10张图像,数据类型为short。
2 从硬盘读取数据到vtkImageData
老规矩,先看下代码,也可以拷贝到自己的项目中,运行下:
#define _CRT_SECURE_NO_WARNINGS#include "vtkImageMapToWindowLevelColors.h"
#include "vtkImageActor.h"
#include "vtkImageMapper3D.h"
#include "vtkImageData.h"
#include "vtkNew.h"
#include "vtkDICOMImageReader.h"
#include "vtkRenderWindow.h"
#include "vtkRenderWindowInteractor.h"
#include "vtkRenderer.h"
#include "vtkCamera.h"
int ImageSlice = 0;
void main()
{vtkNew<vtkImageData> imageData;imageData->SetDimensions(512, 512, 10);imageData->SetSpacing(.49, .49, .7);imageData->SetOrigin(0.0, 0.0, 0.0);imageData->AllocateScalars(VTK_SHORT, 1);void *ptr = imageData->GetScalarPointer();size_t bSize = 512 * 512 * 10;FILE* pFile = fopen("D:\\DicomFiles\\test.img","rb+");if (NULL == pFile)return;fread(ptr, sizeof(short), bSize, pFile);fclose(pFile);int* ext = imageData->GetExtent();// map the input image through a lookup table and window / level itvtkNew<vtkImageMapToWindowLevelColors> windowLevel;windowLevel->SetWindow(1000);windowLevel->SetLevel(800);windowLevel->SetInputData(imageData);//vtkImageActor: draw an image in a rendered 3D scenevtkNew<vtkImageActor> imageActor;imageActor->SetDisplayExtent(ext[0], ext[1], ext[2], ext[3], ImageSlice, ImageSlice);imageActor->GetMapper()->SetInputConnection(windowLevel->GetOutputPort());// The renderer generates the image which is then displayed on the render window.vtkNew<vtkRenderer> renderer;renderer->AddActor(imageActor);renderer->SetBackground(.2,.2,.2);vtkCamera *cam = renderer->GetActiveCamera();if (cam){// 获取物体在三维空间中的原点,XYZ范围和中心//vtkImageData* idata = reader->GetOutput();vtkImageData* idata = imageData;double* origins = idata->GetOrigin(); // 三维坐标中的起点double* bounds = idata->GetBounds(); // 包围盒的xyz范围double* center = idata->GetCenter(); // 中心cam->SetFocalPoint(center);cam->SetPosition(center[0], center[1], center[2] - bounds[5]); // -1 if medical ?cam->SetViewUp(0, 1, 0);cam->SetClippingRange(0.1,1000);renderer->ResetCamera();}// The render window is the actual GUI window that appears on the computer screenvtkNew<vtkRenderWindow> renderWindow;renderWindow->SetSize(512, 512);renderWindow->AddRenderer(renderer);renderWindow->SetWindowName("Dicom Image");// The render window interactor captures mouse events// and will perform appropriate camera or actor manipulation// depending on the nature of the events.vtkNew<vtkRenderWindowInteractor> interactor;interactor->SetRenderWindow(renderWindow);// This starts the event loop and as a side effect causes an initial render.renderWindow->Render();interactor->Start();
}
主要修改的代码如下:
vtkNew<vtkImageData> imageData;imageData->SetDimensions(512, 512, 10);imageData->SetSpacing(.49, .49, .7);imageData->SetOrigin(0.0, 0.0, 0.0);imageData->AllocateScalars(VTK_SHORT, 1);void *ptr = imageData->GetScalarPointer();size_t bSize = 512 * 512 * 10;FILE* pFile = fopen("D:\\DicomFiles\\test.img","rb+");if (NULL == pFile)return;fread(ptr, sizeof(short), bSize, pFile);fclose(pFile);SetDimensions 函数主要用来设置图像的长宽高信息
SetSpacing 是像素间距,图像的(512 - 1)* 0.49 就是图像宽的实际尺寸;
SetOrigin 是图像在世界坐标中的位置;
AllocateScalars有两个参数,第一个参数指定数据类型(16bit short);第二个参数1是 一个像素是有一个元素组成(对于BMP位图来说,一个像素是有RGB/RGBA组成的);
AllocateScalars 同时还分配内存空间;
GetScalarPointer函数可以获取分配内存空间的地址;有了地址,有了数据的大小,就可以直接从硬盘读取裸数据了。读取的代码用C语言来写的,这里就不解释了。
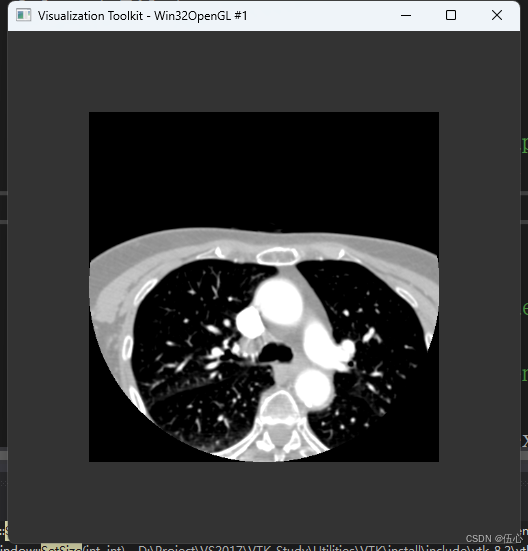
运行结果如下:
3 vtkImageData转RGB或RGBA格式
接下来我们增加了个一个Convert2RGB函数,用户将vtkImageData中的数据转换为RGB格式的数据,并保存的硬盘,然后用Mricro打开查看。
完整源代码如下:
#define _CRT_SECURE_NO_WARNINGS#include "vtkImageMapToWindowLevelColors.h"
#include "vtkImageActor.h"
#include "vtkImageMapper3D.h"
#include "vtkImageData.h"
#include "vtkNew.h"
#include "vtkDICOMImageReader.h"
#include "vtkRenderWindow.h"
#include "vtkRenderWindowInteractor.h"
#include "vtkRenderer.h"
#include "vtkCamera.h"
#include "vtkWindowLevelLookupTable.h"
int ImageSlice = 0;void Convert2RGB(vtkImageData* pData);void main()
{vtkNew<vtkImageData> imageData;imageData->SetDimensions(512, 512, 10);imageData->SetSpacing(.49, .49, .7);imageData->SetOrigin(0.0, 0.0, 0.0);imageData->AllocateScalars(VTK_SHORT, 1);void *ptr = imageData->GetScalarPointer();size_t bSize = 512 * 512 * 10;FILE* pFile = fopen("D:\\DicomFiles\\test.img","rb+");if (NULL == pFile)return;fread(ptr, sizeof(short), bSize, pFile);fclose(pFile);Convert2RGB(imageData);int* ext = imageData->GetExtent();// map the input image through a lookup table and window / level itvtkNew<vtkImageMapToWindowLevelColors> windowLevel;windowLevel->SetWindow(1000);windowLevel->SetLevel(800);windowLevel->SetInputData(imageData);//vtkImageActor: draw an image in a rendered 3D scenevtkNew<vtkImageActor> imageActor;imageActor->SetDisplayExtent(ext[0], ext[1], ext[2], ext[3], ImageSlice, ImageSlice);imageActor->GetMapper()->SetInputConnection(windowLevel->GetOutputPort());// The renderer generates the image which is then displayed on the render window.vtkNew<vtkRenderer> renderer;renderer->AddActor(imageActor);renderer->SetBackground(.2,.2,.2);vtkCamera *cam = renderer->GetActiveCamera();if (cam){// 获取物体在三维空间中的原点,XYZ范围和中心//vtkImageData* idata = reader->GetOutput();vtkImageData* idata = imageData;double* origins = idata->GetOrigin(); // 三维坐标中的起点double* bounds = idata->GetBounds(); // 包围盒的xyz范围double* center = idata->GetCenter(); // 中心cam->SetFocalPoint(center);cam->SetPosition(center[0], center[1], center[2] - bounds[5]); // -1 if medical ?cam->SetViewUp(0, 1, 0);cam->SetClippingRange(0.1,1000);renderer->ResetCamera();}// The render window is the actual GUI window that appears on the computer screenvtkNew<vtkRenderWindow> renderWindow;renderWindow->SetSize(512, 512);renderWindow->AddRenderer(renderer);renderWindow->SetWindowName("Dicom Image");// The render window interactor captures mouse events// and will perform appropriate camera or actor manipulation// depending on the nature of the events.vtkNew<vtkRenderWindowInteractor> interactor;interactor->SetRenderWindow(renderWindow);// This starts the event loop and as a side effect causes an initial render.renderWindow->Render();interactor->Start();
}void Convert2RGB(vtkImageData* pData)
{void *ptr = pData->GetScalarPointer();vtkNew<vtkWindowLevelLookupTable> table;table->SetWindow(1000);table->SetLevel(800);table->Build();table->BuildSpecialColors();long iCount = 512 * 512;void *rgbPtr = malloc(iCount * 3);unsigned char *desPtr = (unsigned char *)rgbPtr;table->MapScalarsThroughTable2(ptr, desPtr, VTK_UNSIGNED_SHORT, iCount, VTK_LUMINANCE, VTK_RGB);FILE* pFile = fopen("color2.img", "wb+");if (!pFile)return;fwrite(rgbPtr, 1, iCount * 3, pFile);fclose(pFile);free(rgbPtr);}打开源代码所在文件夹,会发现多了一个color2.img,打开Mricro软件,将 color2.img拖到Mricro软件中,发现打开后是乱码,这是由于Mricro软件左侧的参数信息不正确。
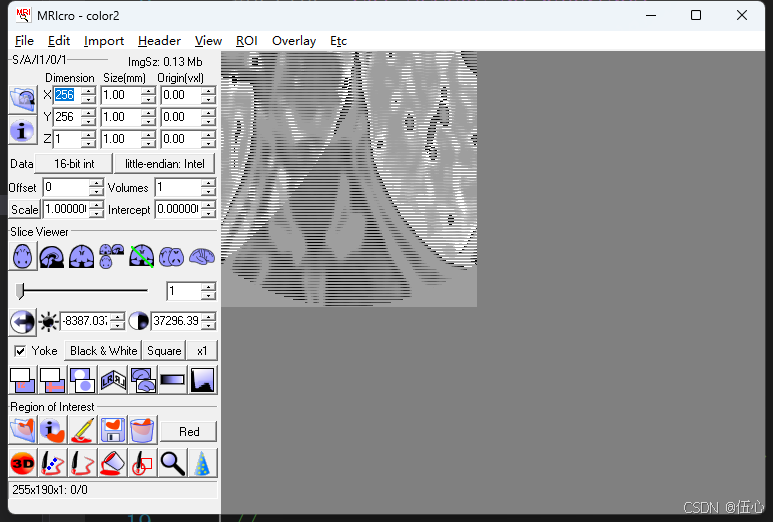
将左侧X Y Z分别填入512 512 1
将Data,选中 24-bit rgb,
然后点击菜单中的Header,Save header;
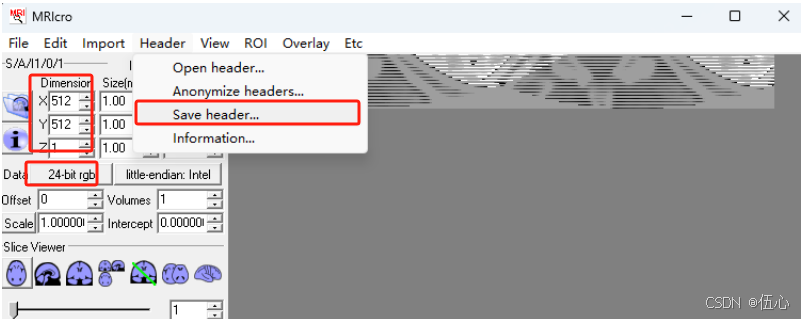
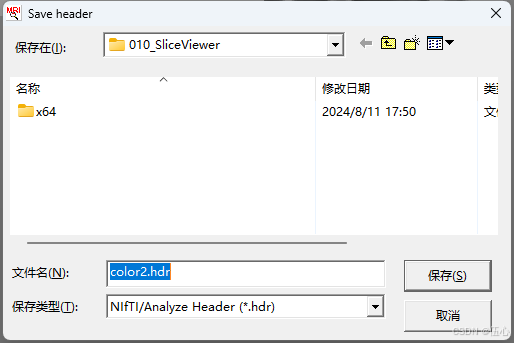
保存完成后,双击 color2.hdr,打开,显示结果如下:
在这里例子中,我们只保存了一张RGB,而图像是有10张的,请自己动手,把10张图像全部保存成为RGB数据,练习一下。
4 练习
(1)用vtkImageData读取一张BMP图像,并显示;
(2)将相机的位置这是在现在位置的反方向,对比下显示结果;
(3)将vtkImageData中的数据重新保存一份,用Mricro软件打开查看是否正确;
总结
相关文章:
004: VTK读入数据---vtkImageData详细说明
VTK医学图像处理---vtkImageData类 目录 VTK医学图像处理---vtkImageData类 简介: 1 Mricro软件的安装和使用 (1) Mricro安装 (2) Mricro转换DICOM为裸数据 2 从硬盘读取数据到vtkImageData 3 vtkImageData转RGB或RGBA格式 4 练习 总结 简介:…...

分割千万级,将大文件分割为小件 csv
依赖 <dependency><groupId>commons-io</groupId><artifactId>commons-io</artifactId><version>2.9.0</version></dependency> package com.topnet.controller;import com.topnet.utils.R; import lombok.extern.slf4j.Slf4…...
 函数深入解析)
SQL COUNT() 函数深入解析
SQL COUNT() 函数深入解析 SQL(Structured Query Language)是一种用于管理关系数据库管理系统(RDBMS)的标准编程语言。在SQL中,COUNT() 函数是一个常用的聚合函数,用于计算数据表中的行数或特定列的值数量…...

vue3和vue2的双向绑定原理
Vue 的双向绑定是其核心特性之一,允许数据和视图之间保持同步。在 Vue 2 和 Vue 3 中,双向绑定的实现原理有所不同。以下是两者的原理对比: Vue 2 的双向绑定原理 在 Vue 2 中,双向绑定是通过以下机制实现的: 响应式…...
[C++]刷题
作者主页: 作者主页 本篇博客专栏:C 创作时间 :2024年6月20日 最后: 十分感谢你可以耐着性子把它读完和我可以坚持写到这里,送几句话,对你,也对我: 1.一个冷知识: …...

职称评审中,论文发表要求?
无论是医生、教师或其他等职业,职称评审无疑是一个非常重要的环节。而职称评审中的论文发表则是评定我们专业能力的重要一环,可如何才能让自己辛苦撰写的的论文被发表,达到论文发表都有哪些要求呢? 一、选题要新颖 编辑和审稿人…...

连续信号的matlab表示
复习信号与系统以及matlab 在matlab中连续信号使用较小的采样间隔来表四 1.单位阶跃信号 阶跃信号:一个理想的单位阶跃信号在时间 t 0 之前值为0,在 t 0 及之后值突然变为常数 A(通常取 A 1) %matlab表示连续信号,是让信号的采样间隔很小…...

centos7.9搭建mysql5.6主从
mysql5.6 搭建数据库配置主从 搭建数据库 官网下载软件包后上传 基于centos7.9搭建mysql5.6.42 [rootmysql02 ~]# ls anaconda-ks.cfg init.sh MySQL-5.6.42-1.el7.x86_64.rpm-bundle.tar解压 tar -xf MySQL-5.6.42-1.el7.x86_64.rpm-bundle.tar -C /opt/[rootmysql02 ~]…...

C#通过ACE OLEDB驱动程序访问 Access和 Excel
ACE 代表 Access Connectivity Engine。它是 Microsoft 提供的一组组件,用于访问和操作 Microsoft Access 数据库以及其他类似的文件格式,如 Excel 工作簿。ACE 主要包括以下几部分: ACE OLEDB 驱动程序:用于通过 OLE DB 提供程序…...

智能新纪元:GPT-Next引领的AI革命及其跨领域应用
GPT-Next:性能的百倍提升 在当今这个科技日新月异的时代,人工智能(AI)无疑是最具活力和变革性的领域之一。最近,OpenAI在KDDI峰会上宣布了一项激动人心的消息:他们即将推出名为“GPT-Next”的新一代语言模…...

Nexus配置npm私服
1,配置npm-hub 2,配置proxy-npm 3,配置group-npm 4,配置local-npm 5,配置淘宝...

《OpenCV计算机视觉》—— 图像轮廓检测与绘制
文章目录 一、轮廓的检测二、轮廓的绘制图像轮廓检测与绘制的代码实现 三、轮廓的近似 一、轮廓的检测 轮廓检测是指在包含目标和背景的数字图像中,忽略背景和目标内部的纹理以及噪声干扰的影响,采用一定的技术和方法来实现目标轮廓提取的过程注意:做轮…...

Spark-Yarn模式如何配置历史服务器
在Spark程序结束之后我们也想看到运行过程怎么办? Yarn模式下,通过以下步骤配置历史服务器即可: mv spark-defaults.conf.template spark-defaults.conf修改spark-default.conf 文件,配置日志存储路径 spark.eventLog.enabled true spark.…...

Maven的安装
一、安装 压缩包解压完的目录如下所示(此处为绿色免安装版): (其余三个文件是针对Maven版本,第三方软件等简要介绍) 二、环境变量 前提: jdk最低版本为JAVA7(即jdk17)…...

iOS——APP启动流程
APP启动 APP启动主要分为两个阶段:pre-main和main之后,而APP的启动优化也主要是在这两个阶段进行的。 main之后的优化:1. 减少不必要的任务,2.必要的任务延迟执行,例如放在控制器界面等等。 APP启动的大致过程&#…...

LLM模型:代码讲解Transformer运行原理
视频讲解、获取源码:LLM模型:代码讲解Transformer运行原理(1)_哔哩哔哩_bilibili 1 训练保存模型文件 2 模型推理 3 推理代码 import torch import tiktoken from wutenglan_model import WutenglanModelimport pyttsx3# 设置设备为CUDA(如果…...

虚幻引擎VR游戏开发02 | 性能优化设置
常识:VR需要保持至少90 FPS的刷新率,以避免用户体验到延迟或晕眩感。以下是优化性能的一系列设置(make sure the frame rate does not drop below a certain threshold) In project setting-> (以下十个设置都在pr…...

Web应用监控:URL事务监测指标解读
监控易是一款功能强大的IT监控软件,它能够实时监控各种IT资源和应用的运行状态,确保业务的连续性和稳定性。在Web应用监控方面,监控易提供了URL事务监测功能,通过模拟用户访问流程,监测整个事务的执行过程和性能表现。…...

redis之缓存淘汰策略
1.查看redis的最大占用内存 使用redis-cli命令连接redis服务端,输入命令:config get maxmemory 输出的值为0,0代表redis的最大占用内存等同于服务器的最大内存。 2.设置redis的最大占用内存 编辑redis的配置文件,并重启redis服务…...

CMake/C++:一个日志库spdlog
项目仓库 GitHub - gabime/spdlog: Fast C logging library.Fast C logging library. Contribute to gabime/spdlog development by creating an account on GitHub.https://github.com/gabime/spdlog 知乎参考贴 https://zhuanlan.zhihu.com/p/674073158 先将仓库clone一下 然…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...

DISMTools企业部署:在组织中大规模应用的最佳实践
DISMTools企业部署:在组织中大规模应用的最佳实践 【免费下载链接】DISMTools The connected place for Windows system administration 项目地址: https://gitcode.com/GitHub_Trending/di/DISMTools DISMTools是一款专为Windows系统管理设计的连接平台&…...

Rydberg原子量子门实现原理与优化技术
1. Rydberg原子平台中的量子门实现基础1.1 Rydberg原子特性与量子计算优势Rydberg原子是指外层电子被激发到高主量子数能级的原子态,这类原子具有三个关键特性使其成为量子计算的理想平台:强偶极-偶极相互作用:当两个原子同时处于Rydberg态时…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...
)
ThinkPad开机报错0183/0253?别慌,手把手教你搞定EFI变量错误(附BIOS重置教程)
ThinkPad开机报错0183/0253?EFI变量错误全面解决方案当你按下ThinkPad的电源键,期待熟悉的开机画面时,屏幕上却突然跳出一串神秘代码——"0183: Bad CRC of Security Settings in EFI Variable"或"0253: EFI Variable Block D…...

一次搞懂内存取证:用Volatility3和Cobalt Strike分析工具复现VNCTF‘来一把紧张刺激的CS’
实战内存取证:从Volatility3到Cobalt Strike信标分析全解析 在网络安全事件响应中,内存取证往往是发现高级威胁的最后一道防线。当攻击者使用文件无落地的技术时,传统的磁盘取证可能一无所获,而内存中却保留着攻击行为的完整痕迹。…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...

基于ATtiny84的智能冰箱监控器:低功耗温度与门状态监测方案
1. 项目概述:一个装在树莓派盒子里的智能冰箱管家如果你家里有台老冰箱,或者对食物储存温度特别在意,总担心冰箱门没关严或者突然断电导致内部升温,那么这个自己动手做的“冰箱看门狗”项目就太适合你了。它本质上是一个高度定制化…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...

保姆级教程:在Ubuntu上配置Frida环境,搞定Android App的IO重定向与签名绕过
在Ubuntu上构建Android逆向工程环境:Frida实战与IO重定向技术解析 对于习惯Linux环境的安全研究人员而言,Windows-centric的逆向工具链往往带来诸多不便。本文将系统性地介绍如何在Ubuntu上搭建完整的Android逆向环境,并深入探讨如何利用Frid…...