最优化方法Python计算:求解约束优化问题的拉格朗日乘子算法
从仅有等式约束的问题入手。设优化问题(7.8)
{ minimize f ( x ) s.t. h ( x ) = o ( 1 ) \begin{cases} \text{minimize}\quad\quad f(\boldsymbol{x})\\ \text{s.t.}\quad\quad\quad \boldsymbol{h}(\boldsymbol{x})=\boldsymbol{o} \end{cases}\quad\quad(1) {minimizef(x)s.t.h(x)=o(1)
中 f ( x ) f(\boldsymbol{x}) f(x), h ( x ) \boldsymbol{h}(\boldsymbol{x}) h(x)均在 R n \text{R}^n Rn上二阶连续可微,且 ( x 0 λ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\end{pmatrix} (x0λ0)是问题(1)满足二阶充分条件的KKT点。即 ∇ f ( x 0 ) − ∇ h ( x 0 ) λ 0 = 0 \nabla f(\boldsymbol{x}_0)-\nabla\boldsymbol{h}(\boldsymbol{x}_0)\boldsymbol{\lambda}_0=0 ∇f(x0)−∇h(x0)λ0=0且 ∀ d ∈ { d ∣ d ≠ o , ∇ h ( x ) ⊤ d = o } \forall\boldsymbol{d}\in\{\boldsymbol{d}|\boldsymbol{d}\not=\boldsymbol{o},\nabla\boldsymbol{h}(\boldsymbol{x})^\top\boldsymbol{d}=\boldsymbol{o}\} ∀d∈{d∣d=o,∇h(x)⊤d=o}, d ⊤ ∇ x x L ( x 0 , λ 0 ) d > 0 \boldsymbol{d}^\top\nabla_{\boldsymbol{xx}} L(\boldsymbol{x}_0,\boldsymbol{\lambda}_0)\boldsymbol{d}>0 d⊤∇xxL(x0,λ0)d>0。其中, L ( x , λ ) = f ( x ) − λ ⊤ h ( x ) L(\boldsymbol{x},\boldsymbol{\lambda})=f(\boldsymbol{x})-\boldsymbol{\lambda}^\top\boldsymbol{h}(\boldsymbol{x}) L(x,λ)=f(x)−λ⊤h(x)为问题(1)的拉格朗日函数,其中的 λ ∈ R l \boldsymbol{\lambda}\in\text{R}^l λ∈Rl为拉格朗日乘子。
定义问题(7.8)的{\heiti{增广拉格朗日函数}}
L ( x , λ , σ ) = f ( x ) − λ ⊤ h ( x ) + σ 2 h ( x ) ⊤ h ( x ) ( 2 ) L(\boldsymbol{x},\boldsymbol{\lambda},\sigma)=f(\boldsymbol{x})-\boldsymbol{\lambda}^\top\boldsymbol{h}(\boldsymbol{x})+\frac{\sigma}{2}\boldsymbol{h}(\boldsymbol{x})^\top\boldsymbol{h}(\boldsymbol{x})\quad\quad{(2)} L(x,λ,σ)=f(x)−λ⊤h(x)+2σh(x)⊤h(x)(2)
其中,罚因子 σ > 0 \sigma>0 σ>0。与问题(1)的拉格朗日函数 L ( x , λ ) L(\boldsymbol{x},\boldsymbol{\lambda}) L(x,λ)相比,增广拉格朗日函数 L ( x , λ , σ ) L(\boldsymbol{x},\boldsymbol{\lambda},\sigma) L(x,λ,σ)多了个罚项 σ 2 h ( x ) ⊤ h ( x ) \frac{\sigma}{2}\boldsymbol{h}(\boldsymbol{x})^\top\boldsymbol{h}(\boldsymbol{x}) 2σh(x)⊤h(x)。对问题(1)的增广拉格朗日函数(2),不难验证 ∀ x ∈ Ω \forall\boldsymbol{x}\in\Omega ∀x∈Ω, L ( x , λ , σ ) = f ( x ) L(\boldsymbol{x},\boldsymbol{\lambda},\sigma)=f(\boldsymbol{x}) L(x,λ,σ)=f(x)。可以证明以下命题:
定理1: ( x 0 λ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\end{pmatrix} (x0λ0)是问题(1)满足二阶充分条件的KKT点,则存在 σ ′ ≥ 0 \sigma'\geq0 σ′≥0,使得对任意的 σ > σ ′ \sigma>\sigma' σ>σ′ x 0 = arg min x ∈ R n L ( x , λ 0 , σ ) . \boldsymbol{x}_0=\arg\min_{\boldsymbol{x}\in\text{R}^n}L(\boldsymbol{x},\boldsymbol{\lambda}_0,\sigma). x0=argx∈RnminL(x,λ0,σ).
反之,若 x 0 = arg min x ∈ R n L ( x , λ 0 , σ ) \boldsymbol{x}_0=\arg\min\limits_{\boldsymbol{x}\in\text{R}^n}L(\boldsymbol{x},\boldsymbol{\lambda}_0,\sigma) x0=argx∈RnminL(x,λ0,σ),且 h ( x 0 ) = o \boldsymbol{h}(\boldsymbol{x}_0)=\boldsymbol{o} h(x0)=o,则 x 0 \boldsymbol{x}_0 x0是问题(1)的局部最优解,即 x 0 = arg min x ∈ Ω f ( x ) \boldsymbol{x}_0=\arg\min\limits_{\boldsymbol{x}\in\Omega}f(\boldsymbol{x}) x0=argx∈Ωminf(x)。
定理1将存在最优解满足二阶充分条件KKT点 ( x 0 λ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\end{pmatrix} (x0λ0)的等式约束优化问题(1)求解,转化为对其增广拉格朗日函数 L ( x , λ 0 , σ ) L(\boldsymbol{x},\boldsymbol{\lambda}_0,\sigma) L(x,λ0,σ)作为目标函数的辅助无约束优化问题的求解,其中 σ > 0 \sigma>0 σ>0是一个充分大的实数。然而,一般情况下,拉格朗日乘子 λ 0 \boldsymbol{\lambda}_0 λ0未必已知。需设法用一系列 { λ k } \{\boldsymbol{\lambda}_k\} {λk}去逼近 λ 0 \boldsymbol{\lambda}_0 λ0。
利用定理1,我们得到由初始的乘子 λ 1 \boldsymbol{\lambda}_1 λ1和罚因子 σ 1 > 0 \sigma_1>0 σ1>0出发,计算问题(1)的满足二阶充分条件的KKT点 ( x 0 λ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\end{pmatrix} (x0λ0)近似值的迭代方法:计算
{ x k + 1 = arg min x ∈ R n L ( x , λ k , σ k ) λ k + 1 = λ k − σ k h ( x k ) . \begin{cases} \boldsymbol{x}_{k+1}=\arg\min\limits_{\boldsymbol{x}\in\text{R}^n}L(\boldsymbol{x},\boldsymbol{\lambda}_k,\sigma_k)\\ \boldsymbol{\lambda}_{k+1}=\boldsymbol{\lambda}_k-\sigma_k\boldsymbol{h}(\boldsymbol{x}_{k}) \end{cases}. {xk+1=argx∈RnminL(x,λk,σk)λk+1=λk−σkh(xk).
对给定的容错误差 ε > 0 \varepsilon>0 ε>0,若 ∥ h ( x k + 1 ) ∥ < ε \lVert\boldsymbol{h}(\boldsymbol{x}_{k+1})\rVert<\varepsilon ∥h(xk+1)∥<ε,则停止迭代。 ( x k + 1 λ k + 1 ) \begin{pmatrix}\boldsymbol{x}_{k+1}\\\boldsymbol{\lambda}_{k+1}\end{pmatrix} (xk+1λk+1)即为 ( x 0 λ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\end{pmatrix} (x0λ0)近似值。\par
否则,即 ∥ h ( x k + 1 ) ∥ ≥ ε \lVert\boldsymbol{h}(\boldsymbol{x}_{k+1})\rVert\geq\varepsilon ∥h(xk+1)∥≥ε,用给定的放大系数 c > 1 c>1 c>1计算
σ k + 1 = { σ k ∥ h k + 1 ∥ ∥ h k ∥ < 1 c × σ k ∥ h k + 1 ∥ ∥ h k ∥ ≥ 1 , \sigma_{k+1}=\begin{cases} \sigma_k&\frac{\lVert\boldsymbol{h}_{k+1}\rVert}{\lVert\boldsymbol{h}_{k}\rVert}<1\\ c\times\sigma_k&\frac{\lVert\boldsymbol{h}_{k+1}\rVert}{\lVert\boldsymbol{h}_{k}\rVert}\geq1 \end{cases}, σk+1={σkc×σk∥hk∥∥hk+1∥<1∥hk∥∥hk+1∥≥1,
进入下一轮迭代。
以上讨论的对等式约束优化问题的乘子算法是由 Powell和Hestenes于1969年提出的,常称为PH算法。
对仅有不等式约束
{ minimize f ( x ) s.t. g ( x ) ≥ o \begin{cases} \text{minimize}\quad f(\boldsymbol{x})\\ \text{s.t.\ \ }\quad\quad\boldsymbol{g}(\boldsymbol{x})\geq\boldsymbol{o} \end{cases} {minimizef(x)s.t. g(x)≥o
其中, f : R n → R f:\text{R}^n\rightarrow\text{R} f:Rn→R, g : R n → R m \boldsymbol{g}:\text{R}^n\rightarrow\text{R}^m g:Rn→Rm在 R n \text{R}^n Rn上二阶连续可微。可行域 Ω = { x ∣ g ( x ) ≥ o } \Omega=\{\boldsymbol{x}|\boldsymbol{g}(\boldsymbol{x})\geq\boldsymbol{o}\} Ω={x∣g(x)≥o}。添加松弛变量 s ≥ o \boldsymbol{s}\geq\boldsymbol{o} s≥o,构造等价问题
{ minimize f ( x ) s.t. g ( x ) − s = o s ≥ o \begin{cases} \text{minimize}\quad f(\boldsymbol{x})\\ \text{s.t.\ \ }\quad\quad\boldsymbol{g}(\boldsymbol{x})-\boldsymbol{s}=\boldsymbol{o}\\ \quad\quad\quad\quad\boldsymbol{s}\geq\boldsymbol{o} \end{cases} ⎩ ⎨ ⎧minimizef(x)s.t. g(x)−s=os≥o
通过变换,上述问题可转换成等价的
{ minimize f ( x ) s.t. h 1 ( x ) = o . \begin{cases} \text{minimize}\quad\quad f(\boldsymbol{x})\\ \text{s.t.}\quad\quad\quad \boldsymbol{h}_1(\boldsymbol{x})=\boldsymbol{o} \end{cases}. {minimizef(x)s.t.h1(x)=o.
其中, h 1 ( x ) = min ( 1 σ μ , g ( x ) ) \boldsymbol{h}_1(\boldsymbol{x})=\boldsymbol{\min}\left(\frac{1}{\sigma}\boldsymbol{\mu},\boldsymbol{g}(\boldsymbol{x})\right) h1(x)=min(σ1μ,g(x))。
相仿地,对一般的优化问题
{ minimize f ( x ) s.t. h ( x ) = o g ( x ) ≥ o ( 3 ) \begin{cases} \text{minimize}\quad f(\boldsymbol{x})\\ \text{s.t.\ \ }\quad\quad\boldsymbol{h}(\boldsymbol{x})=\boldsymbol{o}\\ \quad\quad\quad\quad\boldsymbol{g}(\boldsymbol{x})\geq\boldsymbol{o} \end{cases}\quad\quad(3) ⎩ ⎨ ⎧minimizef(x)s.t. h(x)=og(x)≥o(3)
其中 f ( x ) f(\boldsymbol{x}) f(x)、 h ( x ) \boldsymbol{h}(\boldsymbol{x}) h(x)和 g ( x ) \boldsymbol{g}(\boldsymbol{x}) g(x)在 R n \text{R}^n Rn上二阶连续可微,可行域 Ω = { x ∣ h ( x ) = o , g ( x ≥ o ) } \Omega=\{\boldsymbol{x}|\boldsymbol{h}(\boldsymbol{x})=\boldsymbol{o},\boldsymbol{g}(\boldsymbol{x}\geq\boldsymbol{o})\} Ω={x∣h(x)=o,g(x≥o)}。为求解其满足二阶充分条件的KKT点 ( x 0 λ 0 μ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\\\boldsymbol{\mu}_0\end{pmatrix} x0λ0μ0 ,将其转换为与之等价的问题
{ minimize f ( x ) s.t. h ( x ) = o h 1 ( x ) = o . ( 4 ) \begin{cases} \text{minimize}\quad f(\boldsymbol{x})\\ \text{s.t.\ \ }\quad\quad\boldsymbol{h}(\boldsymbol{x})=\boldsymbol{o}\\ \quad\quad\quad\quad\boldsymbol{h}_1(\boldsymbol{x})=\boldsymbol{o} \end{cases}.\quad\quad{(4)} ⎩ ⎨ ⎧minimizef(x)s.t. h(x)=oh1(x)=o.(4)
其增广拉格朗日函数为
L ( x , λ , μ , σ ) = f ( x ) − λ ⊤ h ( x ) − μ ⊤ h 1 ( x ) + σ 2 ( h ( x ) ⊤ h ( x ) + h 1 ( x ) ⊤ h 1 ( x ) ) L(\boldsymbol{x},\boldsymbol{\lambda},\boldsymbol{\mu},\sigma)=f(\boldsymbol{x})-\boldsymbol{\lambda}^\top\boldsymbol{h}(x)-\boldsymbol{\mu}^\top\boldsymbol{h_1}(\boldsymbol{x})+\frac{\sigma}{2}(\boldsymbol{h}(\boldsymbol{x})^\top\boldsymbol{h}(\boldsymbol{x})+\boldsymbol{h}_1(\boldsymbol{x})^\top\boldsymbol{h}_1(\boldsymbol{x})) L(x,λ,μ,σ)=f(x)−λ⊤h(x)−μ⊤h1(x)+2σ(h(x)⊤h(x)+h1(x)⊤h1(x))
对初始乘子 λ 1 \boldsymbol{\lambda}_1 λ1, μ 1 \boldsymbol{\mu}_1 μ1,罚因子 σ 1 \sigma_1 σ1,用拉格朗日乘子法计算问题(7.10)满足二阶充分条件的KKT点 ( x 0 λ 0 μ 0 ) \begin{pmatrix}\boldsymbol{x}_0\\\boldsymbol{\lambda}_0\\\boldsymbol{\mu}_0\end{pmatrix} x0λ0μ0 的近似值,迭代式为
{ x k + 1 = arg min x ∈ R n L ( x , λ k , μ k , σ k ) λ k + 1 = λ k − σ k h ( x k ) μ k + 1 = max ( o , μ k − σ k g ( x k ) ) , \begin{cases} \boldsymbol{x}_{k+1}=\arg\min\limits_{\boldsymbol{x}\in\text{R}^n}L(\boldsymbol{x},\boldsymbol{\lambda}_k,\boldsymbol{\mu}_k,\sigma_k)\\ \boldsymbol{\lambda}_{k+1}=\boldsymbol{\lambda}_k-\sigma_k\boldsymbol{h}(\boldsymbol{x}_k)\\ \boldsymbol{\mu}_{k+1}=\boldsymbol{\max}(\boldsymbol{o},\boldsymbol{\mu}_k-\sigma_k\boldsymbol{g}(\boldsymbol{x}_k)) \end{cases}, ⎩ ⎨ ⎧xk+1=argx∈RnminL(x,λk,μk,σk)λk+1=λk−σkh(xk)μk+1=max(o,μk−σkg(xk)),
对给定的容错误差 ε > 0 \varepsilon>0 ε>0,记 β = ∥ h ( x k ) ∥ + ∥ h 1 ( x k ) ∥ \beta=\lVert\boldsymbol{h}(\boldsymbol{x}_k)\rVert+\lVert\boldsymbol{h}_1(\boldsymbol{x}_k)\rVert β=∥h(xk)∥+∥h1(xk)∥,则迭代终止条件为
β < ε , \beta<\varepsilon, β<ε,
罚因子扩大条件为
β n e w β o l d = ∥ h ( x k + 1 ) ∥ + ∥ h 1 ( x k + 1 ) ∥ ∥ h ( x k ) ∥ + ∥ h 1 ( x k ) ∥ ≥ η . \frac{\beta_{new}}{\beta_{old}}=\frac{\lVert\boldsymbol{h}(\boldsymbol{x}_{k+1})\rVert+\lVert\boldsymbol{h}_1(\boldsymbol{x}_{k+1})\rVert}{\lVert\boldsymbol{h}(\boldsymbol{x}_k)\rVert+\lVert\boldsymbol{h}_1(\boldsymbol{x}_k)\rVert}\geq\eta. βoldβnew=∥h(xk)∥+∥h1(xk)∥∥h(xk+1)∥+∥h1(xk+1)∥≥η.
其中 η ∈ ( 0 , 1 ) \eta\in(0,1) η∈(0,1)。这一算法是Rockfellar于1973年,在PH算法的基础上提出的,常称为PHR算法。下列代码实现PHR算法。
import numpy as np #导入numpy
from scipy.optimize import minimize, OptimizeResult #导入minimize和OptimizeResult
def phr(f, x1, h = None, g = None, eps = 1e-5):k = 0sigmak = 10c = 2.5eta = 0.8if callable(h): #有等式约束l = h(x1).sizelamdak = 0.1 * np.ones(l)else: #无等式约束lamdak = np.zeros(1)h = lambda x: np.zeros(1)if callable(g): #有不等式约束m = g(x1).sizemuk = 0.1 * np.ones(m)h1 = lambda x: np.minimum(muk / sigmak, g(x))else: #无不等式约束muk = np.zeros(1)h1 = g = lambda x: np.zeros(1)m = 1zero = np.zeros(m) #零向量P = lambda x: np.dot(h(x), h(x)) + np.dot(h1(x), h1(x)) #罚函数L = lambda x: f(x) - np.dot(lamdak, h(x)) - \ #增广拉格朗日函数np.dot(muk, h1(x)) + 0.5 * sigmak * P(x)xk = x1 #迭代点bnew = bold = np.linalg.norm(h(xk)) + np.linalg.norm(h1(xk))#新、旧beta值while bnew >= eps:k += 1xk = minimize(L, xk).x #更新迭代点lamdak = lamdak - sigmak * h(xk) #更新乘子lambdamuk = np.maximum(zero, muk - sigmak * g(xk)) #更新乘子muif bnew / bold >= eta: #须扩大罚因子sigmak *= cbold = bnew #保存betabnew = np.linalg.norm(h(xk)) + np.linalg.norm(h1(xk))#更新betareturn OptimizeResult(fun = f(xk), x = xk, nit = k)
程序的第3~37行定义的函数phr实现图7.4所示的乘子算法PHR。该函数的5个参数f,x1,h,g和eps分别表示优化问题(3)的目标函数 f ( x ) f(\boldsymbol{x}) f(x),初始迭代点 x 1 \boldsymbol{x}_1 x1,等式约束函数 h ( x ) \boldsymbol{h}(\boldsymbol{x}) h(x),不等式约束函数 h ( x ) \boldsymbol{h}(\boldsymbol{x}) h(x)和容错误差 ε \varepsilon ε。其中,h,g和eps的缺省值分别为None、None和 1 0 − 5 10^{-5} 10−5。
函数体内,第4~7行分别初始化迭代次数 k k k,罚因子 σ k \sigma_k σk,罚因子放大系数 c c c和罚因子放大判别值 η \eta η。
第8~13行的if-else语句根据是否有等式约束,初始化乘子 λ \boldsymbol{\lambda} λ:若是,初始化为含有 l l l个0.1的向量,否则置为0。相仿地,第14~21行的if-else语句设置乘子 μ \boldsymbol{\mu} μ函数及 h 1 ( x ) = min { μ σ k , g ( x ) } \boldsymbol{h}_1(\boldsymbol{x})=\min\left\{\frac{\boldsymbol{\mu}}{\sigma_k},\boldsymbol{g}(\boldsymbol{x})\right\} h1(x)=min{σkμ,g(x)}。
第23~25行定义罚函数和增广拉格朗日函数
P ( x ) = h ( x ) ⊤ h ( x ) + h 1 ( x ) ⊤ h 1 ( x ) L ( x ) = f ( x ) − λ ⊤ h ( x ) − μ ⊤ h 1 ( x ) + σ k 2 P ( x ) . \begin{array}{l} P(\boldsymbol{x})=\boldsymbol{h}(\boldsymbol{x})^\top\boldsymbol{h}(\boldsymbol{x})+\boldsymbol{h}_1(\boldsymbol{x})^\top\boldsymbol{h}_1(\boldsymbol{x})\\ L(\boldsymbol{x})=f(\boldsymbol{x})-\boldsymbol{\lambda}^\top\boldsymbol{h}(x)-\boldsymbol{\mu}^\top\boldsymbol{h}_1(\boldsymbol{x})+\frac{\sigma_k}{2}P(\boldsymbol{x}) \end{array}. P(x)=h(x)⊤h(x)+h1(x)⊤h1(x)L(x)=f(x)−λ⊤h(x)−μ⊤h1(x)+2σkP(x).
第26行初始化迭代点xk,第27行将 β n e w \beta_{new} βnew和 β o l d \beta_{old} βold初始化为 ∥ h ( x k ) ∥ + ∥ h 1 ( x k ) ∥ \lVert\boldsymbol{h}(\boldsymbol{x}_k)\rVert+\lVert\boldsymbol{h}_1(\boldsymbol{x}_k)\rVert ∥h(xk)∥+∥h1(xk)∥。
第28~36行的while循环执行算法的迭代。其中,第30~32行按
{ x k + 1 = arg min x ∈ R n L ( x , λ k , μ k , σ k ) λ k + 1 = λ k − σ k h ( x k ) μ k + 1 = max ( o , μ k − σ k g ( x k ) ) , \begin{cases} \boldsymbol{x}_{k+1}=\arg\min\limits_{\boldsymbol{x}\in\text{R}^n}L(\boldsymbol{x},\boldsymbol{\lambda}_k,\boldsymbol{\mu}_k,\sigma_k)\\ \boldsymbol{\lambda}_{k+1}=\boldsymbol{\lambda}_k-\sigma_k\boldsymbol{h}(\boldsymbol{x}_k)\\ \boldsymbol{\mu}_{k+1}=\boldsymbol{\max}(\boldsymbol{o},\boldsymbol{\mu}_k-\sigma_k\boldsymbol{g}(\boldsymbol{x}_k)) \end{cases}, ⎩ ⎨ ⎧xk+1=argx∈RnminL(x,λk,μk,σk)λk+1=λk−σkh(xk)μk+1=max(o,μk−σkg(xk)),
更新迭代点xk,乘子lamdk和muk。第33~34行根据是否
β n e w β o l d ≥ η \frac{\beta_{new}}{\beta_{old}}\geq\eta βoldβnew≥η
决定扩大罚因子 σ k \sigma_k σk。第35、36行更新 β o l d \beta_{old} βold和 β n e w \beta_{new} βnew,以备进入下一轮迭代。一旦测得
β n e w < ε \beta_{new}<\varepsilon βnew<ε
迭代结束,第37行返回最优解近似值xk,最优值近似值f(xk)和迭代次数k。
例1:用程序7.11定义的phr函数求解优化问题
{ minimize f ( x ) = ( x 1 − 2 ) 2 + ( x 2 − 1 ) 2 s.t. x 1 − 2 x 2 + 1 = 0 1 4 x 1 2 + x 2 2 ≤ 1 , \begin{cases} \text{minimize}\quad f(\boldsymbol{x})=(x_1-2)^2+(x_2-1)^2\\ \text{s.t.\ \ }\quad\quad\quad x_1-2x_2+1=0\\ \quad\quad\quad\quad\quad \frac{1}{4}x_1^2+x_2^2\leq1 \end{cases}, ⎩ ⎨ ⎧minimizef(x)=(x1−2)2+(x2−1)2s.t. x1−2x2+1=041x12+x22≤1,
给定初始迭代点 x 1 = ( 3 3 ) \boldsymbol{x}_1=\begin{pmatrix}3\\3\end{pmatrix} x1=(33)。
解:本题中目标函数 f ( x ) = ( x 1 − 2 ) 2 + ( x 2 − 1 ) 2 f(\boldsymbol{x})=(x_1-2)^2+(x_2-1)^2 f(x)=(x1−2)2+(x2−1)2,等式约束函数 h ( x ) = x 1 − 2 x 2 + 1 h(\boldsymbol{x})=x_1-2x_2+1 h(x)=x1−2x2+1,不等式约束函数 g ( x ) = 1 − 1 4 x 1 2 − x 2 2 g(\boldsymbol{x})=1-\frac{1}{4}x_1^2-x_2^2 g(x)=1−41x12−x22。下列代码完成计算。
import numpy as np #导入numpy
from utility import phr #导入phr
np.set_printoptions(precision=4) #设置输出精度
f = lambda x: (x[0] - 2) ** 2 + (x[1] - 1) ** 2 #目标函数
h = lambda x: x[0] - 2 * x[1] + 1 #等式约束函数
g = lambda x: 1 - 0.25 * x[0] ** 2 - x[1] ** 2 #不等式约束函数
x1 = np.array([3, 3]) #初始迭代点
print(phr(f, x1, h, g))
利用代码内注释信息不难理解程序。运行程序,输出
fun: 1.3934640206427056nit: 5x: array([0.8229, 0.9114])
意为phr用5次迭代,以 1 0 − 5 10^{-5} 10−5的容错误差,算得最优解近似值 x 0 ≈ ( 0.8229 0.9114 ) \boldsymbol{x}_0\approx\begin{pmatrix}0.8229\\0.9114\end{pmatrix} x0≈(0.82290.9114),最优值的近似值 f ( x 0 ) ≈ 1.3934 f(\boldsymbol{x}_0)\approx1.3934 f(x0)≈1.3934。
例2:用phr函数求解求解线性规划
{ minimize x 1 − x 2 s.t. − x 1 + 2 x 2 + x 3 ≤ 2 − 4 x 1 + 4 x 2 − x 3 = 4 x 1 − x 3 = 0 x 1 , x 2 , x 3 ≥ 0 , \begin{cases} \text{minimize}\quad\quad x_1-x_2\\ \text{s.t.\ \ \ \ \ }\quad\quad -x_1+2x_2+x_3\leq2\\ \quad\quad\quad\quad\quad -4x_1+4x_2-x_3=4\\ \quad\quad\quad\quad\quad x_1-x_3=0\\ \quad\quad\quad\quad\quad x_1,x_2,x_3\geq0 \end{cases}, ⎩ ⎨ ⎧minimizex1−x2s.t. −x1+2x2+x3≤2−4x1+4x2−x3=4x1−x3=0x1,x2,x3≥0,
给定初始迭代点 x 1 = o \boldsymbol{x}_1=\boldsymbol{o} x1=o。\par
解:这个线性规划的数据矩阵为
c = ( 1 − 1 0 ) , A e q = ( − 4 4 − 1 1 0 − 1 ) , b e q = ( 4 0 ) , A i q = ( 1 − 2 − 1 1 0 0 0 1 0 0 0 1 ) , b i q = ( − 2 0 0 0 ) . \boldsymbol{c}=\begin{pmatrix}1\\-1\\0\end{pmatrix},\boldsymbol{A}_{eq}=\begin{pmatrix}-4&4&-1\\1&0&-1\end{pmatrix},\boldsymbol{b}_{eq}=\begin{pmatrix}4\\0\end{pmatrix},\boldsymbol{A}_{iq}=\begin{pmatrix}1&-2&-1\\1&0&0\\0&1&0\\0&0&1\end{pmatrix},\boldsymbol{b}_{iq}=\begin{pmatrix}-2\\0\\0\\0\end{pmatrix}. c= 1−10 ,Aeq=(−4140−1−1),beq=(40),Aiq= 1100−2010−1001 ,biq= −2000 .
于是
f ( x ) = c ⊤ x , h ( x ) = A e q − b e q , g ( x ) = A i q − b i p . f(\boldsymbol{x})=\boldsymbol{c}^\top\boldsymbol{x},\quad\boldsymbol{h}(\boldsymbol{x})=\boldsymbol{A}_{eq}-\boldsymbol{b}_{eq},\quad\boldsymbol{g}(\boldsymbol{x})=\boldsymbol{A}_{iq}-\boldsymbol{b}_{ip}. f(x)=c⊤x,h(x)=Aeq−beq,g(x)=Aiq−bip.,下列程序完成计算。
import numpy as np #导入numpy
c = np.array([1, -1, 0]) #向量c
Ae = np.array([[-4, 4, -1], #矩阵Aeq[1, 0, -1]])
be = np.array([4, 0]) #向量beq
Ai = np.array([[1, -2, -1], #矩阵Aiq[1, 0, 0],[0, 1, 0],[0, 0, 1]])
bi = np.array([-2, 0, 0, 0]) #向量biq
f = lambda x: np.dot(c, x) #目标函数
h = lambda x: np.matmul(Ae, x) - be #等式约束函数
g = lambda x: np.matmul(Ai, x) - bi #不等式约束函数
x1 = np.zeros(3) #初始迭代点
print(phr(f, x1, h, g))
运行程序,输出
fun: -0.9999999986126238nit: 2x: array([-5.4602e-08, 1.0000e+00, -8.5667e-09])
意为phr只用了2次迭代,即得到最优解 x 0 = ( 0 1 0 ) \boldsymbol{x}_0=\begin{pmatrix}0\\1\\0\end{pmatrix} x0= 010 ,最优值 f ( x 0 ) = − 1 f(\boldsymbol{x}_0)=-1 f(x0)=−1。而对同一问题,sumt(见博文《最优化方法Python计算:求解约束优化问题的罚函数算法》)却用了8次迭代获得同样的结果。
例3:用phr函数求解二次规划
{ minimize x 1 2 + x 1 x 2 + 2 x 2 2 + x 3 2 − 6 x 1 − 2 x 2 − 12 x 3 s.t. x 1 + x 2 + x 3 − 2 = 0 x 1 − 2 x 2 + 3 ≥ 0 x 1 , x 2 , x 3 ≥ 0 , \begin{cases} \text{minimize}\quad x_1^2+x_1x_2+2x_2^2+x_3^2-6x_1-2x_2-12x_3\\ \text{s.t.\ \ }\quad\quad\quad x_1+x_2+x_3-2=0\\ \quad\quad\quad\quad\quad x_1-2x_2+3\geq0\\ \quad\quad\quad\quad\quad x_1,x_2,x_3\geq0 \end{cases}, ⎩ ⎨ ⎧minimizex12+x1x2+2x22+x32−6x1−2x2−12x3s.t. x1+x2+x3−2=0x1−2x2+3≥0x1,x2,x3≥0,
给定初始可行解 x 1 = ( 1 1 0 ) \boldsymbol{x}_1=\begin{pmatrix}1\\1\\0\end{pmatrix} x1= 110 。
解:本二次规划的数据矩阵为
H = ( 2 1 0 1 4 0 0 0 2 ) , c = ( − 6 − 2 − 12 ) A e q = ( 1 1 1 ) , b e q = ( 2 ) A i q = ( 1 − 2 0 1 0 0 0 1 0 0 0 1 ) , b i q = ( − 3 0 0 0 ) \begin{array}{l} \boldsymbol{H}=\begin{pmatrix}2&1&0\\1&4&0\\0&0&2\end{pmatrix},\boldsymbol{c}=\begin{pmatrix}-6\\-2\\-12\end{pmatrix}\\ \boldsymbol{A}_{eq}=\begin{pmatrix}1&1&1\end{pmatrix},\boldsymbol{b}_{eq}=(2)\\ \boldsymbol{A}_{iq}=\begin{pmatrix}1&-2&0\\1&0&0\\0&1&0\\0&0&1\end{pmatrix},\boldsymbol{b}_{iq}=\begin{pmatrix}-3\\0\\0\\0\end{pmatrix} \end{array} H= 210140002 ,c= −6−2−12 Aeq=(111),beq=(2)Aiq= 1100−20100001 ,biq= −3000
下列代码完成计算。
import numpy as np #导入numpy
H = np.array([[2, 1, 0], #矩阵H[1, 4, 0],[0, 0, 2]])
c = np.array([-6, -2, -12]) #向量c
Ae = np.array([[1, 1, 1]]) #矩阵Aeq
be = np.array([2]) #向量beq
Ai = np.array([[-1, -2, 0], #矩阵Aiq[1, 0, 0],[0, 1, 0],[0, 0, 1]])
bi = np.array([-3, 0, 0, 0]) #向量biq
x1 = np.array([1, 1, 0]) #初始迭代点
f = lambda x: 0.5 * np.matmul(x, np.matmul(H, x)) + np.matmul(c, x) #目标函数
h = lambda x: np.matmul(Ae, x) - be #等式约束函数
g = lambda x: np.matmul(Ai, x) - bi #不等式约束函数
print(phr(f, x1, h, g))
\end{lstlisting}\par
运行程序,输出
fun: -20.000001376228557nit: 7x: array([-9.6384e-08, -1.2540e-07, 2.0000e+00])
即phr函数用7次迭代,算得该二次规划的最优解 x 0 = ( 0 0 2 ) \boldsymbol{x}_0=\begin{pmatrix}0\\0\\2\end{pmatrix} x0= 002 ,最优值 f ( x 0 ) = − 20 f(\boldsymbol{x}_0)=-20 f(x0)=−20。相较于sumt函数(见博文《最优化方法Python计算:求解约束优化问题的罚函数算法》)用16次迭代获得同样结果,效率提高是明显的。
写博不易,敬请支持:
如果阅读本文于您有所获,敬请点赞、评论、收藏,谢谢大家的支持!
相关文章:

最优化方法Python计算:求解约束优化问题的拉格朗日乘子算法
从仅有等式约束的问题入手。设优化问题(7.8) { minimize f ( x ) s.t. h ( x ) o ( 1 ) \begin{cases} \text{minimize}\quad\quad f(\boldsymbol{x})\\ \text{s.t.}\quad\quad\quad \boldsymbol{h}(\boldsymbol{x})\boldsymbol{o} \end{cases}\quad\quad(1) {minimizef(x)s.…...

每日OJ_牛客_骆驼命名法(递归深搜)
目录 牛客_骆驼命名法(简单模拟) 解析代码 牛客_骆驼命名法(简单模拟) 骆驼命名法__牛客网 解析代码 首先一个字符一个字符的读取内容: 遇到 _ 就直接跳过。如果上一个字符是 _ 则下一个字符转大写字母。 #inclu…...

MySQL 数据库管理与操作指南
文章目录 MySQL 数据库管理与操作指南1. 忘记 MySQL 密码的处理方法2. MySQL 数据库备份与恢复2.1 数据库备份2.2 数据库恢复 3. MySQL 用户与权限管理3.1 创建用户与授权3.2 查看所有用户3.3 删除用户 4. 关闭 GTID 复制模式5. 查看数据表的存储引擎5.1 查看 MySQL 支持的存储…...

Android Manifest 权限描述大全对照表
115工具网(115工具网-一个提供高效、实用、方便的在线工具集合网站)提供Android Manifest 权限描述大全对照表,可以方便andriod开发者查看安卓权限描述功能 权限名称描述android.permission.ACCESS_CHECKIN_PROPERTIES访问登记属性读取或写入…...

Ollama Qwen2 支持 Function Calling
默认 Ollama 中的 Qwen2 模型不支持 Function Calling,使用默认 Qwen2,Ollama 会报错。本文将根据官方模板对 ChatTemplate 进行改进,使得Qwen2 支持 Tools,支持函数调用。 Ollama 会检查对话模板中是否存在 Tools,如…...

APP测试工程师岗位面试题
一、你们公司研发团队采用敏捷开发模式的原因? 由于版本节奏比较快,开发与测试几乎并行,一个版本周期内会有两版在推动,也就是波次发布,波次发布用于尝试新加入的功能,做小范围快速的开发,验证…...

如何进行 AWS 云监控
什么是 AWS? Amazon Web Services(AWS)是 Amazon 提供的一个全面、广泛使用的云计算平台。它提供广泛的云服务,包括计算能力、存储选项、网络功能、数据库、分析、机器学习、人工智能、物联网和安全。 使用 AWS 有哪些好处&…...

第十六篇:走入计算机网络的传输层--传输层概述
1. 传输层的功能 ① 分割与重组数据 一次数据传输有大小限制,传输层需要做数据分割,所以在数据送达后必然也需要做数据重组。 ② 按端口号寻址 IP只能定位数据哪台主机,无法判断数据报文应该交给哪个应用,传输层给每个应用都设…...
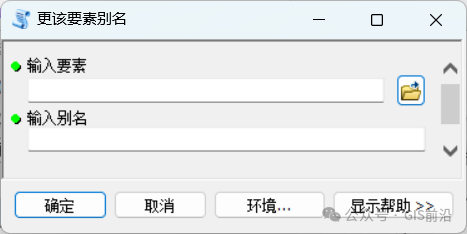
提升效率!ArcGIS中创建脚本工具
在我们日常使用的ArcGIS中已经自带了很多功能强大的工具,但有时候遇到个人的特殊情况还是无法满足,这时就可以试着创建自定义脚本工具。 一、编写代码 此处的代码就是一个很简单的给图层更改别名的代码。 1. import arcpy 2. input_fc arcpy.GetParam…...

无人机之报警器的作用
一、紧急救援与辅助搜救 紧急救援:在事故或紧急情况下,无人机报警器可以迅速发出警报,指引救援人员前往事故地点,提高救援效率。 辅助搜救:无人机搭载报警器可以辅助寻找失踪人员或其他需要搜救的场景,通…...
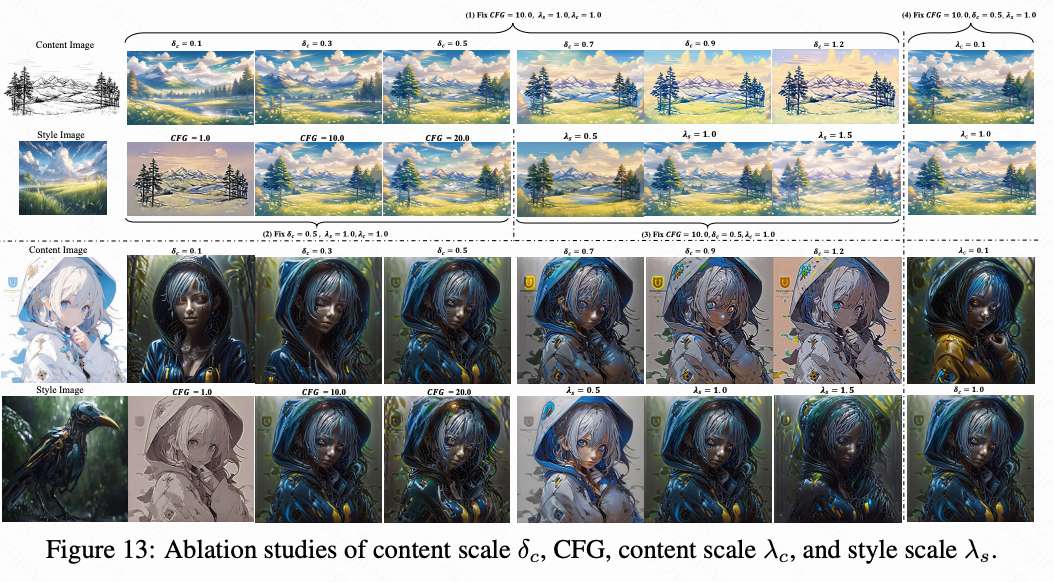
风格控制水平创新高!南理工InstantX小红书发布CSGO:简单高效的端到端风格迁移框架
论文链接:https://arxiv.org/pdf/2408.16766 项目链接:https://csgo-gen.github.io/ 亮点直击 构建了一个专门用于风格迁移的数据集设计了一个简单但有效的端到端训练的风格迁移框架CSGO框架,以验证这个大规模数据集在风格迁移中的有益效果。…...

python文件自动化(4)
接上节课内容,在开始正式移动文件到目标文件夹之前,我们需要再思考一个问题。在代码运行之前,阿文的下载文件夹里已经存在一些分类文件夹了,比如图例中“PDF文件”这个文件夹就是已经存在的。这样的话,在程序运行时&am…...

HTTP 方法
HTTP 方法 1. 引言 HTTP(HyperText Transfer Protocol,超文本传输协议)是互联网上应用最为广泛的协议之一。它定义了客户端和服务器之间交换信息的格式和规则。在HTTP通信中,客户端(通常是浏览器)向服务器…...

通过redis-operator 来部署 Redis Cluster 集群
安装 Redis Operator 首先,需要安装 redis-operator。可以通过 Helm 或直接应用 YAML 文件来安装。 使用 Helm 安装: helm repo add ot-helm https://ot-container-kit.github.io/helm-charts/ helm install redis-operator ot-helm/redis-operator --…...

vue3集成sql语句编辑器
使用的是codemirror 安装 pnpm add codemirror vue-codemirror --savepnpm add codemirror/lang-sqlpnpm add codemirror/theme-one-dark使用 <template><codemirror v-model"configSql" placeholder"Code goes here..." ref"codemirrorR…...

Optuna发布 4.0 重大更新:多目标TPESampler自动化超参数优化速度提升显著
Optuna这个备受欢迎的超参数优化框架在近期发布了其第四个主要版本。自2018年首次亮相以来,Optuna不断发展,现已成为机器学习领域的重要工具。其用户社区持续壮大,目前已达到以下里程碑: 10,000 GitHub星标每月300万 下载量16,00…...
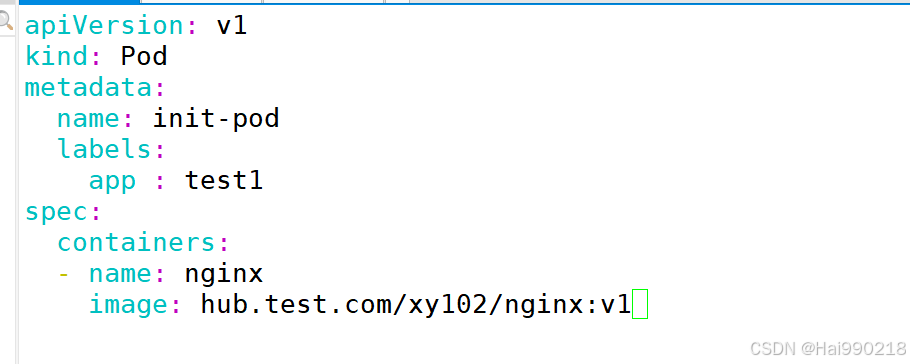
https和harbor仓库跟k8s
目录 https 做证书 harbor仓库 https https是加密的http,它的端口是443,它的协议是tcp协议。建立连接和普通的tcp是一样的,都是三次握手和四次挥手,但是它三次握手之后有一个步骤:SSL或者TLS握手的过程,…...

云计算之网络
目录 一、VPC:云网络的基石 1.1 VPC产品介绍 1.2 vswitch交换机 1.3 vrouter路由器 1.4 产品架构 1.5 常见问题解答及处理 1.5.1 VPC内如何查询某个IP归属? 1.5.2 网络ACL阻断导致ECS访问CLB不通 1.5.3 EIP秒级突发/分布式限速丢包 1.5.4 NAT网关的流量监…...

MySQL Workbench 的入门指南
前言 MySQL Workbench 是一个官方的图形化工具,用于开发、管理和设计 MySQL 数据库服务器。它提供了丰富的功能,可以帮助数据库管理员、开发者以及DBA们高效地工作。下面是一个MySQL Workbench的入门指南,介绍如何安装和使用它。 安装 MyS…...

【SpringBoot】使用Nacos服务注册发现与配置管理
前提:需要提前部署好nacos服务,这里可以参考我的文章:Windows下Nacos安装与配置 0. 版本信息 Spring Boot3.2.8Spring Cloud2023.0.1Spring Cloud alibaba2023.0.1.0nacos2.3.2本地安装的nacos2.3.0 Spring Boot、Spring Cloud、Spring Clo…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理
碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧蓝…...

网络配置工具类详解
CNet 网络配置工具类详解平台:仅支持 Linux,大量使用 ioctl 系统调用一、概述 CNet 是一个 纯静态方法的网络配置工具类,封装了 Linux 下常用的网络操作:功能类别涵盖内容IP 地址读取/设置本机 IP、子网掩码网关读取/添加/删除/设…...
)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)当你的UE5 RPG项目发展到中期,技能数量从十几个膨胀到几十个时,最痛苦的莫过于发现InputAction绑定已经变成一团乱麻。每次新增技能都要修改输入绑定逻辑&a…...

LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 [特殊字符]
LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 🎯 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 还在为复盘找不到关键点而烦恼吗?想提升棋力却…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对?
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

别再只用递归了!用C语言栈实现非递归快速排序,内存效率提升实战
从递归到迭代:C语言栈实现非递归快速排序的工程实践 在嵌入式开发和大规模数据处理场景中,递归实现的快速排序常常面临栈溢出风险。当排序10万个元素的数组时,递归深度可能达到log₂100000≈17层,在仅有2KB栈空间的STM32F103上极易…...

Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题
Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红、…...
)
ArduPilot飞行模式实战:从代码角度看Stabilize、Acro、Loiter模式如何切换(附避坑指南)
ArduPilot飞行模式深度解析:从状态机到实战避坑指南 在开源飞控领域,ArduPilot以其强大的飞行模式系统著称。不同于普通用户只需了解模式功能,开发者更需要掌握模式切换的底层机制——这直接关系到飞行安全与二次开发效率。本文将带您深入Sta…...

NBT数据可视化编辑解决方案:NBTExplorer技术解析与应用指南
NBT数据可视化编辑解决方案:NBTExplorer技术解析与应用指南 【免费下载链接】NBTExplorer A graphical NBT editor for all Minecraft NBT data sources 项目地址: https://gitcode.com/gh_mirrors/nb/NBTExplorer NBTExplorer是一款面向Minecraft数据管理的…...