统计学习方法与实战——统计学习方法之感知机
感知机
- 感知机
- 三要素分析
- 模型
- 策略
- 损失函数选择
- 算法
- 原始形式
- 对偶形式
- 相关问题
- 例子
- iris数据集分类实战
- 数据集查看
- 显示结果
- sklearn 实战感知机
- 习题解答
- 习题2.1
- 解题步骤
- 反证法
- 习题2.2
- 习题2.3
- 凸壳
- 线性可分
- 线性可分证明凸壳不相交
- 证明充分性:凸壳不相交\Rightarrow⇒线性可分
- 证明步骤
、
感知机
- 感知机是根据输入实例的特征向量 x x x 对其进行二㺯分尖的线性分光模型:
f ( x ) = sign ( w ⋅ x + b ) f(x)=\operatorname{sign}(w \cdot x+b) f(x)=sign(w⋅x+b)
感知机模型对应于输入空间 (特征空间) 中的分离超平面 w ⋅ x + b = 0 w \cdot x+b=0 w⋅x+b=0 。 - 感知机学习的策略是极小化损失函数:
min w , b L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) \min _{w, b} L(w, b)=-\sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) w,bminL(w,b)=−xi∈M∑yi(w⋅xi+b)
损失函数对应于误分类点到分离超平面的总距离。 - 感知机学习算法是基于随机梯度下降法的对损失函数的最优化算法,有原始形式和对偶形式。算法简单且易于实现。原始形式中,首先任意选取一个超平面, 然后用梯度下降法不断极小化目标函数。在这个过程中一次随机选取一个误分类点使其梯度下降。
k ⩽ ( R γ ) 2 k \leqslant\left(\frac{R}{\gamma}\right)^{2} k⩽(γR)2
当训练数据集线性可分时,感知机学习算法存在无穷多个解,其解由于不同的初值或不同的迭代顺序而可能有所不同。
一分类模菖
f ( x ) = sign ( w ⋅ x + b ) sign ( x ) = { + 1 , x ⩾ 0 − 1 , x < 0 \begin{aligned} &f(x)=\operatorname{sign}(w \cdot x+b) \\ &\operatorname{sign}(x)= \begin{cases}+1, & x \geqslant 0 \\ -1, & x<0\end{cases} \end{aligned} f(x)=sign(w⋅x+b)sign(x)={+1,−1,x⩾0x<0
给定训练集:
T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{N}, y_{N}\right)\right\} T={(x1,y1),(x2,y2),⋯,(xN,yN)}
定义感知机的损失函数
L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) L(w, b)=-\sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) L(w,b)=−xi∈M∑yi(w⋅xi+b)
算法
随机梯度下降法 Stochastic Gradient Descent
随机抽取一个点使其梯度下降。
w = w + η y i x i b = b + η y i \begin{aligned} &w=w+\eta y_{i} x_{i} \\ &b=b+\eta y_{i} \end{aligned} w=w+ηyixib=b+ηyi
当实例点被误分类,即位于分离超平面的错误侧,则调整 w , b w, b w,b 的值,使分离超平面向该无分类点的一侧移动,直至误分类点被正确分类
三要素分析
模型
输入空间: X ⊆ R n \mathcal X\sube \bf R^n X⊆Rn
输出空间: Y = + 1 , − 1 \mathcal Y={+1,-1} Y=+1,−1
决策函数: f ( x ) = s i g n ( w ⋅ x + b ) f(x)=sign (w\cdot x+b) f(x)=sign(w⋅x+b)
策略
确定学习策略就是定义**(经验)**损失函数并将损失函数最小化。
注意这里提到了经验,所以学习是base在训练数据集上的操作
损失函数选择
损失函数的一个自然选择是误分类点的总数,但是,这样的损失函数不是参数 w , b w,b w,b的连续可导函数,不易优化
损失函数的另一个选择是误分类点到超平面 S S S的总距离,这是感知机所采用的
感知机学习的经验风险函数(损失函数)
L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) L(w,b)=-\sum_{x_i\in M}y_i(w\cdot x_i+b) L(w,b)=−xi∈M∑yi(w⋅xi+b)
其中 M M M是误分类点的集合
给定训练数据集 T T T,损失函数 L ( w , b ) L(w,b) L(w,b)是 w w w和 b b b的连续可导函数
算法
原始形式
输入: T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , … , ( x N , y N ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \ldots,\left(x_{N}, y_{N}\right)\right\} T={(x1,y1),(x2,y2),…,(xN,yN)}
x i ∈ X = R n , y i ∈ Y = { − 1 , + 1 } , i = 1 , 2 , … , N ; 0 < η ⩽ 1 x_{i} \in \mathcal{X}=\mathbf{R}^{\mathbf{n}}, \mathbf{y}_{\mathbf{i}} \in \mathcal{Y}=\{-1,+1\}, i=1,2, \ldots, \mathcal{N} ; 0<\eta \leqslant 1 xi∈X=Rn,yi∈Y={−1,+1},i=1,2,…,N;0<η⩽1输出: w , b ; f ( x ) = s i g n ( w ⋅ x + b ) w,b;f(x)=sign(w\cdot x+b) w,b;f(x)=sign(w⋅x+b)
选取初值 w 0 , b 0 w_0,b_0 w0,b0
训练集中选取数据 ( x i , y i ) (x_i,y_i) (xi,yi)
如果 y i ( w ⋅ x i + b ) ⩽ 0 y_i(w\cdot x_i+b)\leqslant 0 yi(w⋅xi+b)⩽0
w ← w + η y i x i w \leftarrow w+\eta y_{i} x_{i} w←w+ηyixi
b ← b + η y i b \leftarrow b+\eta y_{i} b←b+ηyi转至(2),直至训练集中没有误分类点
注意这个原始形式中的迭代公式,可以对 x x x补1,将 w w w和 b b b合并在一起,合在一起的这个叫做扩充权重向量,书上有提到。
对偶形式
对偶形式的基本思想是将 w w w和 b b b表示为实例 x i x_i xi和标记 y i y_i yi的线性组合的形式,通过求解其系数而求得 w w w和 b b b。
算法流程:
输入: T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , … , ( x N , y N ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \ldots,\left(x_{N}, y_{N}\right)\right\} T={(x1,y1),(x2,y2),…,(xN,yN)}
x i ∈ X = R n , y i ∈ Y = { − 1 , + 1 } , i = 1 , 2 , … , N ; 0 < η ⩽ 1 x_{i} \in \mathcal{X}=\mathbf{R}^{\mathbf{n}}, \mathbf{y}_{\mathbf{i}} \in \mathcal{Y}=\{-1,+1\}, i=1,2, \ldots, \mathcal{N} ; 0<\eta \leqslant 1 xi∈X=Rn,yi∈Y={−1,+1},i=1,2,…,N;0<η⩽1输出:
α , b ; f ( x ) = sign ( ∑ j = 1 N α j y j x j ⋅ x + b ) α > = ( α 1 , α 2 , ⋯ , α N ) T \begin{aligned} \alpha, b ; f(x) &=\operatorname{sign}\left(\sum_{j=1}^{N} \alpha_{j} y_{j} x_{j} \cdot x+b\right) \\ \alpha >&=\left(\alpha_{1}, \alpha_{2}, \cdots, \alpha_{N}\right)^{T} \end{aligned} α,b;f(x)α>=sign(j=1∑Nαjyjxj⋅x+b)=(α1,α2,⋯,αN)T
α ← 0 , b ← 0 \alpha \leftarrow 0,b\leftarrow 0 α←0,b←0
训练集中选取数据 ( x i , y i ) (x_i,y_i) (xi,yi)
如果 y i ( ∑ j = 1 N α j y j x j ⋅ x + b ) ⩽ 0 y_i\left(\sum_{j=1}^N\alpha_jy_jx_j\cdot x+b\right) \leqslant 0 yi(∑j=1Nαjyjxj⋅x+b)⩽0
α i ← α i + η b ← b + η y i \alpha_i\leftarrow \alpha_i+\eta \nonumber\\ b\leftarrow b+\eta y_i αi←αi+ηb←b+ηyi
- 转至(2),直至训练集中没有误分类点
Gram matrix
对偶形式中,训练实例仅以内积的形式出现。
为了方便可预先将训练集中的实例间的内积计算出来并以矩阵的形式存储,这个矩阵就是所谓的Gram矩阵
G = [ x i ⋅ x j ] N × N G=\left[x_{i} \cdot x_{j}\right]_{N \times N} G=[xi⋅xj]N×N
相关问题
题中问考虑损失函数最值的时候,不会有影响么?
-
感知机处理线性可分数据集,二分类, Y = { + 1 , − 1 } \mathcal{Y}=\{+1,-1\} Y={+1,−1},所以涉及到的乘以 y i y_{i} yi 的操作实际贡献的是符号;
-
损失函数 L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) L(w,b)=-\sum_{x_i\in M}y_i(w\cdot x_i+b) L(w,b)=−∑xi∈Myi(w⋅xi+b),其中 M M M 是错分的点集合,线性可分的数据集肯定能找到超平面 S S S, 所以这个损失函数最值是0。
-
如果正确分类, y i ( w ⋅ x i + b ) = ∣ w ⋅ x i + b ∣ y_i(w\cdot x_i+b)=|w\cdot x_i+b| yi(w⋅xi+b)=∣w⋅xi+b∣ ,错误分类的话,为了保证正数就加个负号,这就是损失函数里面那个负号,这个就是函数间隔;
-
1 ∣ ∣ w ∣ ∣ \frac{1}{||w||} ∣∣w∣∣1 用来归一化超平面法向量,得到几何间隔,也就是点到超平面的距离, 函数间隔和几何间隔的差异在于同一个超平面 ( w , b ) (w,b) (w,b) 参数等比例放大成 ( k w , k b ) (kw,kb) (kw,kb) 之后,虽然表示的同一个超平面,但是点到超平面的函数间隔也放大了,但是几何间隔是不变的;
-
具体算法实现的时候, w w w要初始化,然后每次迭代针对错分点进行调整,既然要初始化,那如果初始化个 ∣ ∣ w ∣ ∣ = 1 ||w||=1 ∣∣w∣∣=1 的情况也就不用纠结了,和不考虑 1 ∣ ∣ w ∣ ∣ \frac{1}{||w||} ∣∣w∣∣1 是一样的了;
-
针对错分点是这么调整的
w ← w + η y i x i b ← b + η y i \begin{aligned} w&\leftarrow w+\eta y_ix_i\\ b&\leftarrow b+\eta y_i \end{aligned} wb←w+ηyixi←b+ηyi
前面说了 y i y_i yi 就是个符号,那么感知机就可以解释为针对误分类点,通过调整 w , b w,b w,b 使得超平面向该误分类点一侧移动,迭代这个过程最后全分类正确;
-
感知机的解不唯一,和初值有关系,和误分类点调整顺序也有关系;
-
这么调整就能找到感知机的解?能,Novikoff还证明了,通过有限次搜索能找到将训练数据完全正确分开的分离超平面。
例子
iris数据集分类实战
数据集查看
import pandas as pd
import numpy as np
from sklearn.datasets import load_iris
import matplotlib.pyplot as plt# load data
iris = load_iris()
df = pd.DataFrame(iris.data, columns=iris.feature_names)
df['label'] = iris.target
df.columns = ['sepal length', 'sepal width', 'petal length', 'petal width', 'label'
]
df.label.value_counts()
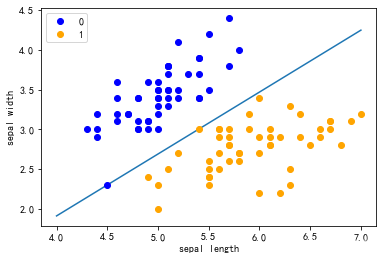
plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0')
plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1')
plt.xlabel('sepal length')
plt.ylabel('sepal width')
plt.legend()
- 数据集显示

data = np.array(df.iloc[:100, [0, 1, -1]])
X, y = data[:,:-1], data[:,-1]
y = np.array([1 if i == 1 else -1 for i in y])
# 数据线性可分,二分类数据
# 此处为一元一次线性方程
class Model:def __init__(self):self.w = np.ones(len(data[0]) - 1, dtype=np.float32)self.b = 0self.l_rate = 0.1# self.data = datadef sign(self, x, w, b):y = np.dot(x, w) + breturn y# 随机梯度下降法def fit(self, X_train, y_train):is_wrong = Falsewhile not is_wrong:wrong_count = 0for d in range(len(X_train)):X = X_train[d]y = y_train[d]if y * self.sign(X, self.w, self.b) <= 0:self.w = self.w + self.l_rate * np.dot(y, X)self.b = self.b + self.l_rate * ywrong_count += 1if wrong_count == 0:is_wrong = Truereturn 'Perceptron Model!'
perceptron = Model()
perceptron.fit(X, y)x_points = np.linspace(4, 7, 10)
y_ = -(perceptron.w[0] * x_points + perceptron.b) / perceptron.w[1]
plt.plot(x_points, y_)plt.plot(data[:50, 0], data[:50, 1], 'bo', color='blue', label='0')
plt.plot(data[50:100, 0], data[50:100, 1], 'bo', color='orange', label='1')
plt.xlabel('sepal length')
plt.ylabel('sepal width')
plt.legend()
显示结果
sklearn 实战感知机
import sklearn
from sklearn.linear_model import Perceptron
clf = Perceptron(fit_intercept=True, max_iter=1000, shuffle=True)
clf.fit(X, y)
print(clf.coef_)
# 截距 Constants in decision function.
print(clf.intercept_)
# 画布大小
plt.figure(figsize=(10,10))# 中文标题
plt.rcParams['font.sans-serif']=['SimHei']
plt.rcParams['axes.unicode_minus'] = False
plt.title('鸢尾花线性数据示例')plt.scatter(data[:50, 0], data[:50, 1], c='b', label='Iris-setosa',)
plt.scatter(data[50:100, 0], data[50:100, 1], c='orange', label='Iris-versicolor')# 画感知机的线
x_ponits = np.arange(4, 8)
y_ = -(clf.coef_[0][0]*x_ponits + clf.intercept_)/clf.coef_[0][1]
plt.plot(x_ponits, y_)# 其他部分
plt.legend() # 显示图例
plt.grid(False) # 不显示网格
plt.xlabel('sepal length')
plt.ylabel('sepal width')
plt.legend()
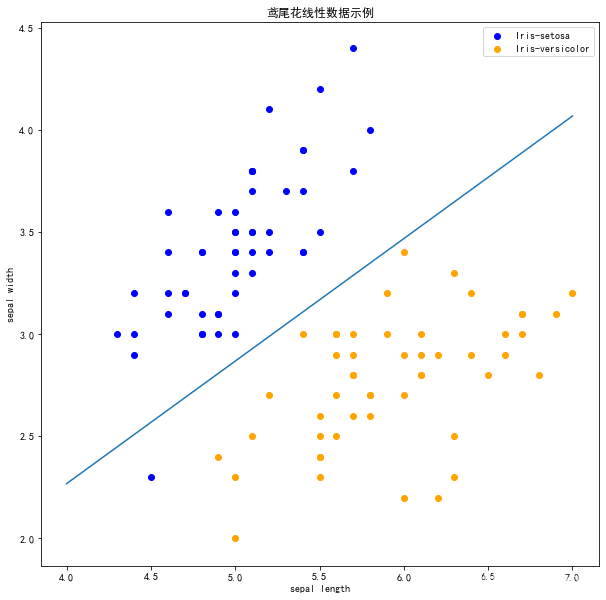
在上图中,有一个位于左下角的蓝点没有被正确分类,这是因为 SKlearn 的 Perceptron 实例中有一个tol参数。
tol 参数规定了如果本次迭代的损失和上次迭代的损失之差小于一个特定值时,停止迭代。所以我们需要设置 tol=None 使之可以继续迭代:
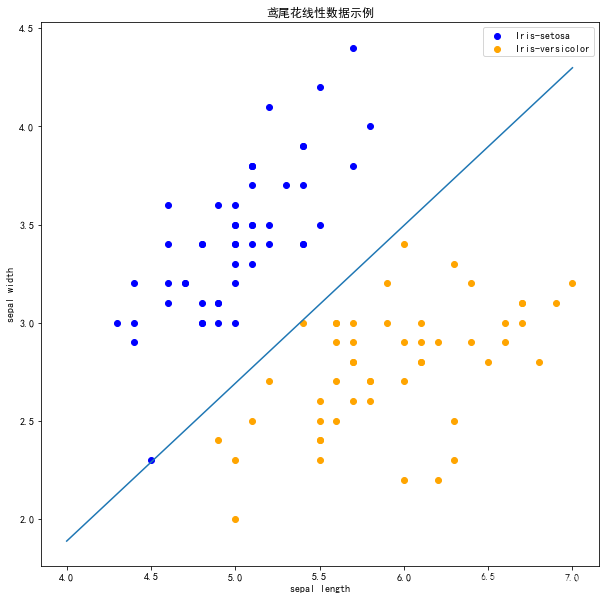
clf = Perceptron(fit_intercept=True, max_iter=1000,tol=None,shuffle=True)
clf.fit(X, y)# 画布大小
plt.figure(figsize=(10,10))# 中文标题
plt.rcParams['font.sans-serif']=['SimHei']
plt.rcParams['axes.unicode_minus'] = False
plt.title('鸢尾花线性数据示例')plt.scatter(data[:50, 0], data[:50, 1], c='b', label='Iris-setosa',)
plt.scatter(data[50:100, 0], data[50:100, 1], c='orange', label='Iris-versicolor')# 画感知机的线
x_ponits = np.arange(4, 8)
y_ = -(clf.coef_[0][0]*x_ponits + clf.intercept_)/clf.coef_[0][1]
plt.plot(x_ponits, y_)# 其他部分
plt.legend() # 显示图例
plt.grid(False) # 不显示网格
plt.xlabel('sepal length')
plt.ylabel('sepal width')
plt.legend()
习题解答
习题2.1
Minsky 与 Papert 指出:感知机因为是线性模型,所以不能表示复杂的函数,如异或 (XOR)。验证感知机为什么不能表示异或。
- 列出异或函数(XOR)的输入和输出;
- 使用图例法证明异或问题是线性不可分的;
- 使用反证法证明感知机无法表示异或。
解题步骤
异或函数(XOR)的输入和输出
对于异或函数(XOR),全部的输入与对应的输出如下:
x 1 x 2 y = x 1 ⊕ x 2 0 0 − 1 0 1 1 1 0 1 1 1 − 1 \begin{array}{|c|c|c|} \hline x_{1} & x_{2} & y=x_{1} \oplus x_{2} \\ \hline 0 & 0 & -1 \\ \hline 0 & 1 & 1 \\ \hline 1 & 0 & 1 \\ \hline 1 & 1 & -1 \\ \hline \end{array} x10011x20101y=x1⊕x2−111−1
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline# 使用Dataframe表示异或的输入与输出数据
x1 = [0, 0, 1, 1]
x2 = [0, 1, 0, 1]
y = [-1, 1, 1, -1]
x1 = np.array(x1)
x2 = np.array(x2)
y = np.array(y)
data = np.c_[x1, x2, y]
data = pd.DataFrame(data, index=None, columns=['x1', 'x2', 'y'])
data.head()
# 获取正类别(y=1)的数据
positive = data.loc[data['y'] == 1]
# 获取负类别(y=-1)的数据
negative = data.loc[data['y'] == -1]# 绘制数据图
# 绘制坐标轴
plt.xlim(-0.5, 1.5)
plt.ylim(-0.5, 1.5)
plt.xticks([-0.5, 0, 1, 1.5])
plt.yticks([-0.5, 0, 1, 1.5])
# 添加坐标轴文字
plt.xlabel("x1")
plt.ylabel("x2")
# 绘制正、负样本点
plt.plot(positive['x1'], positive['x2'], "ro")
plt.plot(negative['x1'], negative['x2'], "bx")
# 添加图示
plt.legend(['Positive', 'Negative'])
plt.show()
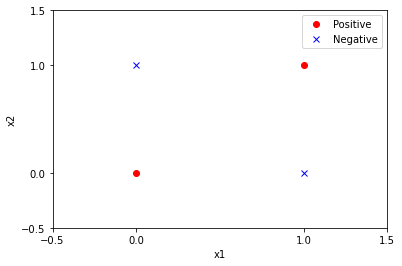
从上图可以看出,无法使用一条直线将两类样本分开,所以异或问题是线性不可分的
下一步,使用感知机模型进行测试w,b
from sklearn.linear_model import Perceptron
import numpy as np# 构造异或问题的训练数据集
X_train = np.array([[1, 1], [1, 0], [0, 1], [0, 0]])
y = np.array([-1, 1, 1, -1])# 使用sklearn的Perceptron类构建感知机模型
perceptron_model = Perceptron()
# 进行模型训练
perceptron_model.fit(X_train, y)# 打印模型参数
print("感知机模型的参数:w=", perceptron_model.coef_[0], "b=", perceptron_model.intercept_[0])
感知机模型的参数:w= [0. 0.] b= 0.0
反证法
f ( x ) = sign ( w ⋅ x + b ) f(x)=\operatorname{sign}(w \cdot x+b) f(x)=sign(w⋅x+b)
sign ( x ) = { + 1 , x ⩾ 0 − 1 , x < 0 \operatorname{sign}(x)= \begin{cases}+1, & x \geqslant 0 \\ -1, & x<0\end{cases} sign(x)={+1,−1,x⩾0x<0
假设咸知机模型可以表示异或问题,即满足异或函数(XOR)输入与输出的情况(见第 1 步 1 步 1步 )。假设 x x x 向量只有两个维度 x 1 , x 2 x_{1}, x_{2} x1,x2 :
- 根据 x 1 = 0 , x 2 = 0 , f ( x ) = − 1 x_{1}=0, x_{2}=0, f(x)=-1 x1=0,x2=0,f(x)=−1 ,则 w ⋅ x + b < 0 w \cdot x+b<0 w⋅x+b<0 ,可得 b < 0 b<0 b<0 ;
- 根据 x 1 = 0 , x 2 = 1 , f ( x ) = 1 x_{1}=0, x_{2}=1, f(x)=1 x1=0,x2=1,f(x)=1 ,则 w 2 + b > 0 w_{2}+b>0 w2+b>0 ,结合 b < 0 b<0 b<0 ,可得 w 2 > − b > 0 w_{2}>-b>0 w2>−b>0;
- 根据 x 1 = 1 , x 2 = 0 , f ( x ) = 1 x_{1}=1, x_{2}=0, f(x)=1 x1=1,x2=0,f(x)=1, 则 w 1 + b > 0 w_{1}+b>0 w1+b>0 ,结合 b < 0 b<0 b<0 ,可得 w 1 > − b > 0 w_{1}>-b>0 w1>−b>0;
- 根据 x 1 = 1 , x 2 = 1 x_{1}=1, x_{2}=1 x1=1,x2=1 ,并结合 w 1 + b > 0 、 w 2 > 0 w_{1}+b>0 、 w_{2}>0 w1+b>0、w2>0 ,则 w 1 + w 2 + b > 0 w_{1}+w_{2}+b>0 w1+w2+b>0 ,可得 f ( x ) = 1 f(x)=1 f(x)=1 ,与异或条件中的 f ( x ) = − 1 f(x)=-1 f(x)=−1 矛盾。
- 所以假设不成立,原命题成立,即感知机模型不能表示异或。
习题2.2
解题步骤在上面的iris数据中已经体现。
import numpy as np
from matplotlib import pyplot as plt
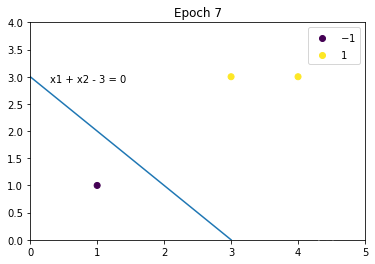
%matplotlib tkclass Perceptron:def __init__(self, X, Y, lr=0.001, plot=True):"""初始化感知机:param X: 特征向量:param Y: 类别:param lr: 学习率:param plot: 是否绘制图形"""self.X = Xself.Y = Yself.lr = lrself.plot = plotif plot:self.__model_plot = self._ModelPlot(self.X, self.Y)self.__model_plot.open_in()def fit(self):# (1)初始化weight, bweight = np.zeros(self.X.shape[1])b = 0# 训练次数train_counts = 0# 分类错误标识mistake_flag = Truewhile mistake_flag:# 开始前,将mistake_flag设置为False,用于判断本次循环是否有分类错误mistake_flag = False# (2)从训练集中选取x,yfor index in range(self.X.shape[0]):if self.plot:self.__model_plot.plot(weight, b, train_counts)# 损失函数loss = self.Y[index] * (weight @ self.X[index] + b)# (3)如果损失函数小于0,则该点是误分类点if loss <= 0:# 更新weight, bweight += self.lr * self.Y[index] * self.X[index]b += self.lr * self.Y[index]# 训练次数加1train_counts += 1print("Epoch {}, weight = {}, b = {}, formula: {}".format(train_counts, weight, b, self.__model_plot.formula(weight, b)))# 本次循环有误分类点(即分类错误),置为Truemistake_flag = Truebreakif self.plot:self.__model_plot.close()# (4)直至训练集中没有误分类点return weight, bclass _ModelPlot:def __init__(self, X, Y):self.X = Xself.Y = Y@staticmethoddef open_in():# 打开交互模式,用于展示动态交互图plt.ion()@staticmethoddef close():# 关闭交互模式,并显示最终的图形plt.ioff()plt.show()def plot(self, weight, b, epoch):plt.cla()# x轴表示x1plt.xlim(0, np.max(self.X.T[0]) + 1)# y轴表示x2plt.ylim(0, np.max(self.X.T[1]) + 1)# 画出散点图,并添加图示scatter = plt.scatter(self.X.T[0], self.X.T[1], c=self.Y)plt.legend(*scatter.legend_elements())if True in list(weight == 0):plt.plot(0, 0)else:x1 = -b / weight[0]x2 = -b / weight[1]# 画出分离超平面plt.plot([x1, 0], [0, x2])# 绘制公式text = self.formula(weight, b)plt.text(0.3, x2 - 0.1, text)plt.title('Epoch %d' % epoch)plt.pause(0.01)@staticmethoddef formula(weight, b):text = 'x1 ' if weight[0] == 1 else '%d*x1 ' % weight[0]text += '+ x2 ' if weight[1] == 1 else ('+ %d*x2 ' % weight[1] if weight[1] > 0 else '- %d*x2 ' % -weight[1])text += '= 0' if b == 0 else ('+ %d = 0' %b if b > 0 else '- %d = 0' % -b)return textX = np.array([[3, 3], [4, 3], [1, 1]])
Y = np.array([1, 1, -1])
model = Perceptron(X, Y, lr=1)
weight, b = model.fit()
习题2.3
证明以下定理:样本集线性可分的充分必要条件是正实例点所构成的凸壳与负实例点所构成的凸壳互不相交。
- 写出凸壳和线性可分的定义
- 证明必要性:线性可分\Rightarrow⇒凸壳不相交
- 证明充分性:凸壳不相交\Rightarrow⇒线性可分
凸壳
设集合 S ⊂ R n S \subset R^{n} S⊂Rn ,是由 R n R^{n} Rn 中的 k k k 个点所组成的集合,即 S = { x 1 , x 2 , ⋯ , x k } S=\left\{x_{1}, x_{2}, \cdots, x_{k}\right\} S={x1,x2,⋯,xk} 。定义 S S S 的凸壳 conv ( S ) \operatorname{conv}(S) conv(S) 为:
conv ( S ) = { x = ∑ i = 1 k λ i x i ∣ ∑ i = 1 k λ i = 1 , λ i ⩾ 0 , i = 1 , 2 , ⋯ , k } \operatorname{conv}(S)=\left\{x=\sum_{i=1}^{k} \lambda_{i} x_{i} \mid \sum_{i=1}^{k} \lambda_{i}=1, \lambda_{i} \geqslant 0, i=1,2, \cdots, k\right\} conv(S)={x=i=1∑kλixi∣i=1∑kλi=1,λi⩾0,i=1,2,⋯,k}
线性可分
给定一个数据集
T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x n , y n ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{n}, y_{n}\right)\right\} T={(x1,y1),(x2,y2),⋯,(xn,yn)}
其中 x i ∈ X = R n , y i ∈ Y = { + 1 , − 1 } , i = 1 , 2 , ⋯ , n x_{i} \in \mathcal{X}=R_{n}, y_{i} \in \mathcal{Y}=\{+1,-1\}, i=1,2, \cdots, n xi∈X=Rn,yi∈Y={+1,−1},i=1,2,⋯,n ,如果存在某个超平面 S S S
w ⋅ x + b = 0 w \cdot x+b=0 w⋅x+b=0
能够将数据集的正实例点和负实例点完全正确划分到超平面的两侧,即对所有 y i = + 1 y_{i}=+1 yi=+1 的实例 i i i ,有 w ⋅ x i + b > 0 w \cdot x_{i}+b>0 w⋅xi+b>0 ,对 y i = − 1 y_{i}=-1 yi=−1 的实例 i i i ,有 w ⋅ x i + b < 0 w \cdot x_{i}+b<0 w⋅xi+b<0 ,则称数据集 T T T 为线性可分 数据集,否则称数据集 T T T 线性不可分。
线性可分证明凸壳不相交
证明思路(反证法):
假设原命题不成立:样本集线性可分,正实例点所构成的凸壳与负实例点所构成的凸壳相交
条件推理
发现矛盾,得出原命题成立
- 假设原命题不成立:
设数据集 T T T 中的正例点集为 S + , S + S_{+} , S_{+} S+,S+的凸壳为 conv ( S + ) \operatorname{conv}\left(S_{+}\right) conv(S+),负实例点集为 S − , S − S_{-} , S_{-} S−,S−的凸壳为 conv ( S − ) \operatorname{conv}\left(S_{-}\right) conv(S−)。
假设样本集线性可分,正实例点所构成的凸壳与负实例点所构成的凸壳相交,即存在某个元素 s s s ,同时满足 s ∈ conv ( S + ) s \in \operatorname{conv}\left(S_{+}\right) s∈conv(S+)和 s ∈ conv ( S − ) s \in \operatorname{conv}\left(S_{-}\right) s∈conv(S−)。 - 条件推理:
若数据集 T T T 是线性可分的,根据线性可分的定义,则存在一个超平面能够将 S + S_{+} S+和 S − S_{-} S−完全分离:
w ⋅ x + b = 0 w \cdot x+b=0 w⋅x+b=0
对于所有的正例点 x i x_{i} xi ,有
w ⋅ x i + b = ε i > 0 , i = 1 , 2 , ⋯ , ∣ S + ∣ w \cdot x_{i}+b=\varepsilon_{i}>0, \quad i=1,2, \cdots,\left|S_{+}\right| w⋅xi+b=εi>0,i=1,2,⋯,∣S+∣
根据凸壳的定义,对于 conv ( S + ) \operatorname{conv}\left(S_{+}\right) conv(S+)中的元素 s + s_{+} s+,有
w ⋅ s + + b = w ⋅ ( ∑ i = 1 ∣ S + ∣ λ i x i ) + b = ( ∑ i = 1 ∣ S + ∣ λ i ( ε i − b ) ) + b = ∑ i = 1 ∣ S + ∣ λ i ε i − ( b ∑ i = 1 ∣ S + ∣ λ i ) + b ( ∵ ∑ i = 1 ∣ S + ∣ λ i = 1 ) = ∑ i = 1 ∣ S + ∣ λ i ε i \begin{aligned} w \cdot s_{+}+b &=w \cdot\left(\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i} x_{i}\right)+b \\ &=\left(\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i}\left(\varepsilon_{i}-b\right)\right)+b \\ &=\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i} \varepsilon_{i}-\left(b \sum_{i=1}^{\left|S_{+}\right|} \lambda_{i}\right)+b \quad\left(\because \sum_{i=1}^{\left|S_{+}\right|} \lambda_{i}=1\right) \\ &=\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i} \varepsilon_{i} \end{aligned} w⋅s++b=w⋅ i=1∑∣S+∣λixi +b= i=1∑∣S+∣λi(εi−b) +b=i=1∑∣S+∣λiεi− bi=1∑∣S+∣λi +b ∵i=1∑∣S+∣λi=1 =i=1∑∣S+∣λiεi
因此 w ⋅ s + + b = ∑ i = 1 ∣ S + ∣ λ i ε i > 0 w \cdot s_{+}+b=\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i} \varepsilon_{i}>0 w⋅s++b=∑i=1∣S+∣λiεi>0 。
同理对于 S − S_{-} S−中的元素 s − s_{-} s−,有 w ⋅ s − + b = ∑ i = 1 ∣ S − ∣ λ i ε i < 0 w \cdot s_{-}+b=\sum_{i=1}^{\left|S_{-}\right|} \lambda_{i} \varepsilon_{i}<0 w⋅s−+b=∑i=1∣S−∣λiεi<0 - 找出矛盾,得出原命题成立:
根据条件推理,当 s ∈ conv ( S + ) s \in \operatorname{conv}\left(S_{+}\right) s∈conv(S+)有 w ⋅ s + b = ∑ i = 1 ∣ S + ∣ λ i ε i > 0 w \cdot s+b=\sum_{i=1}^{\left|S_{+}\right|} \lambda_{i} \varepsilon_{i}>0 w⋅s+b=∑i=1∣S+∣λiεi>0 ,当 s ∈ conv ( S − ) s \in \operatorname{conv}\left(S_{-}\right) s∈conv(S−)有 w ⋅ s + b = ∑ i = 1 ∣ S − ∣ λ i ε i < 0 w \cdot s+b=\sum_{i=1}^{\left|S_{-}\right|} \lambda_{i} \varepsilon_{i}<0 w⋅s+b=∑i=1∣S−∣λiεi<0 ,既 s s s 不可能同时满足若 s ∈ conv ( S + ) s \in \operatorname{conv}\left(S_{+}\right) s∈conv(S+)和 s ∈ conv ( S − ) s \in \operatorname{conv}\left(S_{-}\right) s∈conv(S−),这与假设命题 矛盾。
因此,原命题成立,当样本线性可分时, conv ( S + ) \operatorname{conv}\left(S_{+}\right) conv(S+)和 conv ( S − ) \operatorname{conv}\left(S_{-}\right) conv(S−)必不相交。必要性得证。
证明充分性:凸壳不相交\Rightarrow⇒线性可分
证明思路:
根据凸壳不相交,找到一个超平面
证明这个超平面可将两个互不相交的凸壳分隔开(反证法)
上述超平面可以将凸壳分隔开,则样本集满足线性可分
证明步骤
- 根据凸壳不相交,找到一个超平面:
设数据集 T T T 中的正例点集为 S + , S + S_{+} , S_{+} S+,S+的凸壳为 conv ( S + ) \operatorname{conv}\left(S_{+}\right) conv(S+),负实例点集为 S − , S − S_{-} , S_{-} S−,S−的凸壳为 conv ( S − ) \operatorname{conv}\left(S_{-}\right) conv(S−),且conv ( S + ) \left(S_{+}\right) (S+)与 conv ( S − ) \operatorname{conv}\left(S_{-}\right) conv(S−)不相交。
定义两个点 x 1 , x 2 x_{1}, x_{2} x1,x2 的距离为
dist ( x 1 , x 2 ) = ∥ x 1 − x 2 ∥ 2 \operatorname{dist}\left(x_{1}, x_{2}\right)=\left\|x_{1}-x_{2}\right\|_{2} dist(x1,x2)=∥x1−x2∥2
定义 conv ( S + ) 、 conv ( S − ) \operatorname{conv}\left(S_{+}\right) 、 \operatorname{conv}\left(S_{-}\right) conv(S+)、conv(S−)的距离是,分别处于两个凸壳集合中的点的距离最小值:
dist ( conv ( S + ) , conv ( S − ) ) = min ∥ s + − s − ∥ 2 s + ∈ conv ( S + ) , s − ∈ conv ( S − ) \operatorname{dist}\left(\operatorname{conv}\left(S_{+}\right), \operatorname{conv}\left(S_{-}\right)\right)=\min \left\|s_{+}-s_{-}\right\|_{2} \quad s_{+} \in \operatorname{conv}\left(S_{+}\right), s_{-} \in \operatorname{conv}\left(S_{-}\right) dist(conv(S+),conv(S−))=min∥s+−s−∥2s+∈conv(S+),s−∈conv(S−)
记最小值点分别为 x + , x − x_{+}, x_{-} x+,x−, 即:
dist ( conv ( S + ) , conv ( S − ) ) = dist ( x + , x − ) x + ∈ conv ( S + ) , x − ∈ conv ( S − ) \operatorname{dist}\left(\operatorname{conv}\left(S_{+}\right), \operatorname{conv}\left(S_{-}\right)\right)=\operatorname{dist}\left(x_{+}, x_{-}\right) \quad x_{+} \in \operatorname{conv}\left(S_{+}\right), x_{-} \in \operatorname{conv}\left(S_{-}\right) dist(conv(S+),conv(S−))=dist(x+,x−)x+∈conv(S+),x−∈conv(S−)
定义以 ( x + , x − ) \left(x_{+}, x_{-}\right) (x+,x−)为法线,且过两点中点的超平面为 f ( x ∣ w , b ) = 0 f(x \mid w, b)=0 f(x∣w,b)=0, 则参数为:
f ( x ∣ w , b ) = ( x + − x − ) T ( x − x + + x − 2 ) { w = ( x + − x − ) T b = − 1 2 ( ∥ x + ∥ 2 2 − ∥ x − ∥ 2 2 ) \begin{aligned} f(x \mid w, b) &=\left(x_{+}-x_{-}\right)^{T}\left(x-\frac{x_{+}+x_{-}}{2}\right) \\ \left\{\begin{aligned} w &=\left(x_{+}-x_{-}\right)^{T} \\ b &=-\frac{1}{2}\left(\left\|x_{+}\right\|_{2}^{2}-\left\|x_{-}\right\|_{2}^{2}\right) \end{aligned}\right. \end{aligned} f(x∣w,b)⎩ ⎨ ⎧wb=(x+−x−)T=−21(∥x+∥22−∥x−∥22)=(x+−x−)T(x−2x++x−) - 证明这个超平面可将两个互不相交的凸壳分隔开 (反证法)
若某个超平面可将两个互不相交的凸壳分隔开,则 f ( x ) ≥ 0 , x ∈ conv ( S + ) f(x) \geq 0, x \in \operatorname{conv}\left(S_{+}\right) f(x)≥0,x∈conv(S+)且 f ( x ) ≤ 0 , x ∈ conv ( S − ) f(x) \leq 0, x \in \operatorname{conv}\left(S_{-}\right) f(x)≤0,x∈conv(S−)。
f ( x ) = ( x + − x − ) T ( x − x + + x − 2 ) = ( x + − x − ) T ( x + x + − x + − x + + x − 2 ) = ( x + − x − ) T ( x − x + + x + − x − 2 ) = ( x + − x − ) T ( x − x + ) + ∥ x + − x − ∥ 2 2 2 \begin{aligned} f(x) &=\left(x_{+}-x_{-}\right)^{T}\left(x-\frac{x_{+}+x_{-}}{2}\right) \\ &=\left(x_{+}-x_{-}\right)^{T}\left(x+x_{+}-x_{+}-\frac{x_{+}+x_{-}}{2}\right) \\ &=\left(x_{+}-x_{-}\right)^{T}\left(x-x_{+}+\frac{x_{+}-x_{-}}{2}\right) \\ &=\left(x_{+}-x_{-}\right)^{T}\left(x-x_{+}\right)+\frac{\left\|x_{+}-x_{-}\right\|_{2}^{2}}{2} \end{aligned} f(x)=(x+−x−)T(x−2x++x−)=(x+−x−)T(x+x+−x+−2x++x−)=(x+−x−)T(x−x++2x+−x−)=(x+−x−)T(x−x+)+2∥x+−x−∥22
假设原命题不成立:当 x ∈ conv ( S + ) x \in \operatorname{conv}\left(S_{+}\right) x∈conv(S+)时,假设 f ( x ) < 0 f(x)<0 f(x)<0 ,则有:
( x + − x − ) T ( x − x + ) < 0 \left(x_{+}-x_{-}\right)^{T}\left(x-x_{+}\right)<0 (x+−x−)T(x−x+)<0
设点 u = x + + t ( x − x + ) , t ∈ [ 0 , 1 ] u=x_{+}+t\left(x-x_{+}\right), t \in[0,1] u=x++t(x−x+),t∈[0,1] ,即 u u u 在 x + x_{+} x+和 x x x 的线段上。根据凸壳定义, u ∈ conv ( S + ) u \in \operatorname{conv}\left(S_{+}\right) u∈conv(S+)。则 u u u 和 x − x_{-} x−距离的平方为:
g ( t ) = ∥ u − x − ∥ 2 2 = ∥ x + + t ( x − x + ) − x − ∥ 2 2 \begin{aligned} g(t) &=\left\|u-x_{-}\right\|_{2}{ }^{2} \\ &=\left\|x_{+}+t\left(x-x_{+}\right)-x_{-}\right\|_{2}{ }^{2} \end{aligned} g(t)=∥u−x−∥22=∥x++t(x−x+)−x−∥22
求解 u u u 和 x − x_{-} x−距离的最小值, 对上式求导:
g ′ ( t ) = 2 ( x + + t ( x − x + ) − x − ) ( x − x + ) = 2 ( x + − x − ) T ( x − x + ) + t ∥ x − x + ∥ 2 2 \begin{aligned} g^{\prime}(t) &=2\left(x_{+}+t\left(x-x_{+}\right)-x_{-}\right)\left(x-x_{+}\right) \\ &=2\left(x_{+}-x_{-}\right)^{T}\left(x-x_{+}\right)+t\left\|x-x_{+}\right\|_{2}{ }^{2} \end{aligned} g′(t)=2(x++t(x−x+)−x−)(x−x+)=2(x+−x−)T(x−x+)+t∥x−x+∥22
根据假设,在 t = 0 t=0 t=0 时,得 g ′ ( t ) < 0 g^{\prime}(t)<0 g′(t)<0 。在当 t t t 足够接近于 0 时 (导函数在 0 处的极限值为负,则存在邻域函数递减),即 g ( t ) < g ( 0 ) g(t)<g(0) g(t)<g(0) 。
∴ \therefore ∴ 存在一点 u u u ,使得它到 x − x_{-} x−的距离,比定义的凸壳距离 dist ( x + , x − ) \operatorname{dist}\left(x_{+}, x_{-}\right) dist(x+,x−)还小。产生矛盾。
故原命题成立,即 f ( x ) ≥ 0 , x ∈ conv ( S + ) f(x) \geq 0, x \in \operatorname{conv}\left(S_{+}\right) f(x)≥0,x∈conv(S+)。同理,可证 f ( x ) ≤ 0 , x ∈ conv ( S − ) f(x) \leq 0, x \in \operatorname{conv}\left(S_{-}\right) f(x)≤0,x∈conv(S−)。则可以找到一个超平面将两个互不相交的凸壳分隔开。
3. 上述超平面可以将凸壳分隔开,则样本集满足线性可分
根据凸壳定义,数据集 T T T 中正例点 s + ∈ conv ( S + ) , s_{+} \in \operatorname{conv}\left(S_{+}\right) , s+∈conv(S+), 负例点 s − ∈ conv ( S − ) s_{-} \in \operatorname{conv}\left(S_{-}\right) s−∈conv(S−)。上述超平面可以将正例点集 S + S_{+} S+和负例点集 S − S_{-} S−两个凸壳分隔开,则可以使样本集线性可分。充分性得证。
链接: DataWhale.
相关文章:
统计学习方法与实战——统计学习方法之感知机
感知机 感知机三要素分析模型策略损失函数选择 算法原始形式对偶形式 相关问题 例子iris数据集分类实战数据集查看 显示结果sklearn 实战感知机 习题解答习题2.1解题步骤反证法 习题2.2习题2.3凸壳线性可分线性可分证明凸壳不相交证明充分性:凸壳不相交\Rightarrow⇒…...

语言学习有捷径?没错!这4个方法让你轻松搞定英语翻译
现在全世界都在用英语,这门语言真的超级重要。不管你是学习、上班还是出去玩,会点英语翻译肯定能帮上大忙。但是,对很多人来说,翻译英语还是挺难的。别急,今天我就来给你介绍几个超好用的英语翻译工具,让你…...

聊一聊大型网站稳定性建设思路
目录 架构阶段的稳定性建设项目 编码阶段的稳定性建设 测试阶段的稳定性建设 发布阶段的稳定性建设 运行阶段的稳定性建设项目 故障发生时的稳定性建设 网站稳定性的建设是一项综合的系统工程,就像人的健康一样,如果平时不注意健康饮食、不注意锻炼…...

Nginx常用配置
Windows版本Nginx开机自启动 可直接下载已经配置好的文件,点击即可下载:Windows版本Nginx1.26.0 下载WinSW v2.12.0 首先从https://github.com/winsw/winsw/releases下载WinSW v2.12.0 下载Nginx 下载地址https://nginx.org/en/download.html 修…...

前端开发中遇到的小问题以及解决方案记录2
1、H5中适配屏幕的工具-postcss-px-to-viewport postcss-px-to-viewport。因为设计稿一般给的都是375px宽度的,所以假如一个字体是16px,那么在开发中不能直接写死为16px,因为各个厂商的手机屏幕大小是不同的,所以要根据屏幕大小去…...

Qt-常用控件(3)-输入类
1. QLineEdit QLineEdit 用来表示单行输入框.可以输入一段文本,但是不能换行 核心属性 属性说明text输入框中的文本inputMask输入内容格式约束maxLength最大长度frame是否添加边框echoMode显示方式. QLineEdit::Normal :这是默认值,文本框会显示输入的文本。QLineE…...

使用Docker启动Redis容器并映射端口
在现代软件开发中,Redis 是一种非常流行的开源内存数据结构存储,通常用作数据库、缓存或消息传递系统。Docker 是一个开源的应用容器引擎,它允许开发者打包他们的应用以及依赖包到一个可移植的容器中,然后发布到任何流行的 Linux …...

用fastapi搭建cpca地址提取服务接口
以前的客户地址比较乱,现在想提取出省份城市, 开始了解分词技术,后发现python有这样的库 cpca提取地址挺不错,可以从垃圾地址中提取省市区以及区号。 文章会用fastapi搭建服务端 通过post调用cpca,提取来了后&#…...

libvncclient编写多线程qt的VNC客户端
概述 使用qt和libvncclient编写vnc的客户端程序,多线程读写,拒绝卡顿。qt环境:5.15.3libvncclient:0.9.14下载地址:https://github.com/LibVNC/libvncserver/releases 编译libvncclient 打开CMakeList文件ÿ…...

视频处理基础之gradio框架实现
这些函数是用于处理视频文件的Python代码片段,它们依赖于ffmpeg和ffprobe工具,这些工具是FFmpeg项目的一部分,用于处理视频和音频数据。下面是每个函数的用途和用法的总结: 1. ffmpeg_installed() 函数: - 用途&am…...

黑马点评2——商户查询缓存(P37店铺类型查询业务添加缓存练习题答案)redis缓存、更新、穿透、雪崩、击穿、工具封装
文章目录 什么是缓存?添加Redis缓存店铺类型查询业务添加缓存练习题 缓存更新策略给查询商铺的缓存添加超时剔除和主动更新的策略 缓存穿透缓存空对象布隆过滤 缓存雪崩解决方案 缓存击穿解决方案基于互斥锁方式解决缓存击穿问题基于逻辑过期的方式解决缓存击穿问题…...

概率DP (由一道绿题引起的若干问题。目前为一些老题,蒟蒻的尝试学习1.0)
概率DP: 利用动态规划去解决 概率 期望 的题目。 概率DP 求概率(采用顺推) 从 初始状态推向结果,同一般的DP类似,只是经历了概率论知识的包装。 老题: 添加链接描述 题意: 袋子里有w只白鼠&am…...

[Python]生成器和yield关键字
生成器和yield关键字 1.生成器介绍: 概述: 它指的是 generator, 类似于以前学过的: 列表推导式, 集合推导式, 字典推导式… 作用: 降低资源消耗, 快速(批量)生成数据. 实现方式: 1.推导式写法. my_generator (i for i in range(5)) 2.yield写法. def get_gene…...

Nginx 负载均衡+高可用 集群部署(Keepalived+LVS DR模式)
一、LVS负载均衡简介 1.1 LVS基本介绍 LVS(Linux Virtual Server)即Linux虚拟服务器,是由章文嵩博士主导开发的开源负载均衡项目,目前LVS已经被集成在Linux内核中。该项目在Linux内核中实现了基于IP地址的请求数据负载均衡调度方…...

算法 | 基础 | 出现奇数次的数字
这里写自定义目录标题 异或运算题目1题目2 本篇是关于异或(^)运算的运用。后期看算法过程中如果再碰到异或的都会收录到本篇中 异或运算 在逻辑学中,逻辑算符异或(exclusive or)是对两个运算元的一种逻辑析取类型&am…...
log4j 控制台和文件输出乱码问题解决
一个小问题,却让我感觉到,现在真正动脑的人很少。。我来说说吧。 今天遇到一个小问题, log4j输出到文件乱码,控制台正常。显然是编码问题导致。Google一搜,几乎一水的说: 项目中log4j在英文版linux下输出中…...
在国产芯片上实现YOLOv5/v8图像AI识别-【4.2】RK3588获取USB摄像头图像推流RTSP更多内容见视频
本专栏主要是提供一种国产化图像识别的解决方案,专栏中实现了YOLOv5/v8在国产化芯片上的使用部署,并可以实现网页端实时查看。根据自己的具体需求可以直接产品化部署使用。 B站配套视频:https://www.bilibili.com/video/BV1or421T74f 前言…...

TCP/IP协议栈详解及其在现代网络中的应用
在当今数字化时代,网络已成为我们生活中不可或缺的一部分。无论是社交、工作还是娱乐,网络都在背后发挥着至关重要的作用。而这一切的实现,都离不开TCP/IP协议栈。本文将详细介绍TCP/IP协议栈的结构、各层功能以及它在现代网络中的应用。 什…...

亚信安全荣获“2024年网络安全优秀创新成果大赛”优胜奖
近日,由中央网信办网络安全协调局指导、中国网络安全产业联盟(CCIA)主办的“2024年网络安全优秀创新成果大赛”评选结果公布。亚信安全信舱ForCloud荣获“创新产品”优胜奖,亚信安全“宁波市政务信息化网络数据安全一体化指挥系统…...

如何从硬盘恢复已删除/丢失的文件?硬盘恢复已删除的文件技巧
如何从硬盘恢复已删除/丢失的文件?本教程将教您如何使用专业硬盘恢复软件从内置或外置硬盘恢复数据,或不使用软件从硬盘恢复已删除的文件。 “有人知道如何从外部硬盘恢复文件吗?当我将外部硬盘插入计算机时,我错误地删除了一些文…...

新手也能懂的SSRF漏洞实战:用iwebsec靶场复现文件读取与内网探测
从零开始掌握SSRF漏洞:iwebsec靶场实战指南1. 认识SSRF漏洞的本质想象一下,你正在一家高档餐厅点餐,服务员承诺可以帮你从任何地方获取食材——包括隔壁竞争对手的厨房。SSRF(Server-Side Request Forgery)漏洞就像这个…...

内网环境下Win7系统批量离线补丁部署实战指南
1. 内网Win7补丁部署的挑战与解决方案老旧Win7系统在内网环境中的安全隐患就像漏雨的屋顶,看似不影响日常使用,但随时可能引发严重后果。我经手过几十家单位的系统加固项目,发现这些场景存在三个典型痛点:首先是补丁来源问题&…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

通过用量看板分析团队大模型API消耗发现优化调用策略的机会
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过用量看板分析团队大模型API消耗发现优化调用策略的机会 作为团队的技术负责人,确保大模型API调用在满足业务需求的…...
的原理、演进与未来)
车载诊断系统(OBD)的原理、演进与未来
本文约8,167字,建议收藏阅读 作者 | 北湾南巷 出品 | 汽车电子与软件 引 言 在现代汽车中,越来越多的故障不再表现为明显的机械损坏,而是以“亮灯”“报码”“性能异常”等电子信号的形式出现。发动机为什么亮起故障灯?排放是否达…...

GEO优化可以覆盖哪些搜索平台
这是一个非常现实的问题。企业投放资源做GEO,当然希望覆盖面越广越好。那么GEO优化到底能覆盖哪些平台?覆盖到什么程度?不同平台的GEO逻辑有什么差异?GEO平台覆盖的三个层级第一层级:通用大模型AI平台(核心…...

NHSE终极教程:5分钟掌握动物森友会存档编辑技巧
NHSE终极教程:5分钟掌握动物森友会存档编辑技巧 【免费下载链接】NHSE Animal Crossing: New Horizons save editor 项目地址: https://gitcode.com/gh_mirrors/nh/NHSE 还在为《集合啦!动物森友会》的收集烦恼吗?想快速打造梦想岛屿却…...

终极崩坏星穹铁道自动化指南:3分钟掌握解放双手的智能游戏伴侣
终极崩坏星穹铁道自动化指南:3分钟掌握解放双手的智能游戏伴侣 【免费下载链接】StarRailAssistant 崩坏:星穹铁道自动化 | 崩坏:星穹铁道自动锄大地 | 崩坏:星穹铁道锄大地 | 自动锄大地 | 基于模拟按键 项目地址: https://git…...

MPC Video Renderer终极指南:如何在Windows上实现专业级视频渲染体验
MPC Video Renderer终极指南:如何在Windows上实现专业级视频渲染体验 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer MPC Video Renderer是一款专为Windows平台设计…...