【AI】Pytorch_模型构建
建议点赞收藏关注!持续更新至pytorch大部分内容更完。
本文已达到10w字,故按模块拆开,详见目录导航。
整体框架如下
数据及预处理
模型及其构建
损失函数及优化器
本节目录
- 模型
- 线性回归
- 逻辑回归
- LeNet
- AlexNet
- 构建模块
- 组织复杂网络
- 初始化网络参数
- 梯度消失 or 梯度爆炸
- 定义网络层
- 卷积层
- 池化层
- 线性层(全连接层)
- 激活函数层
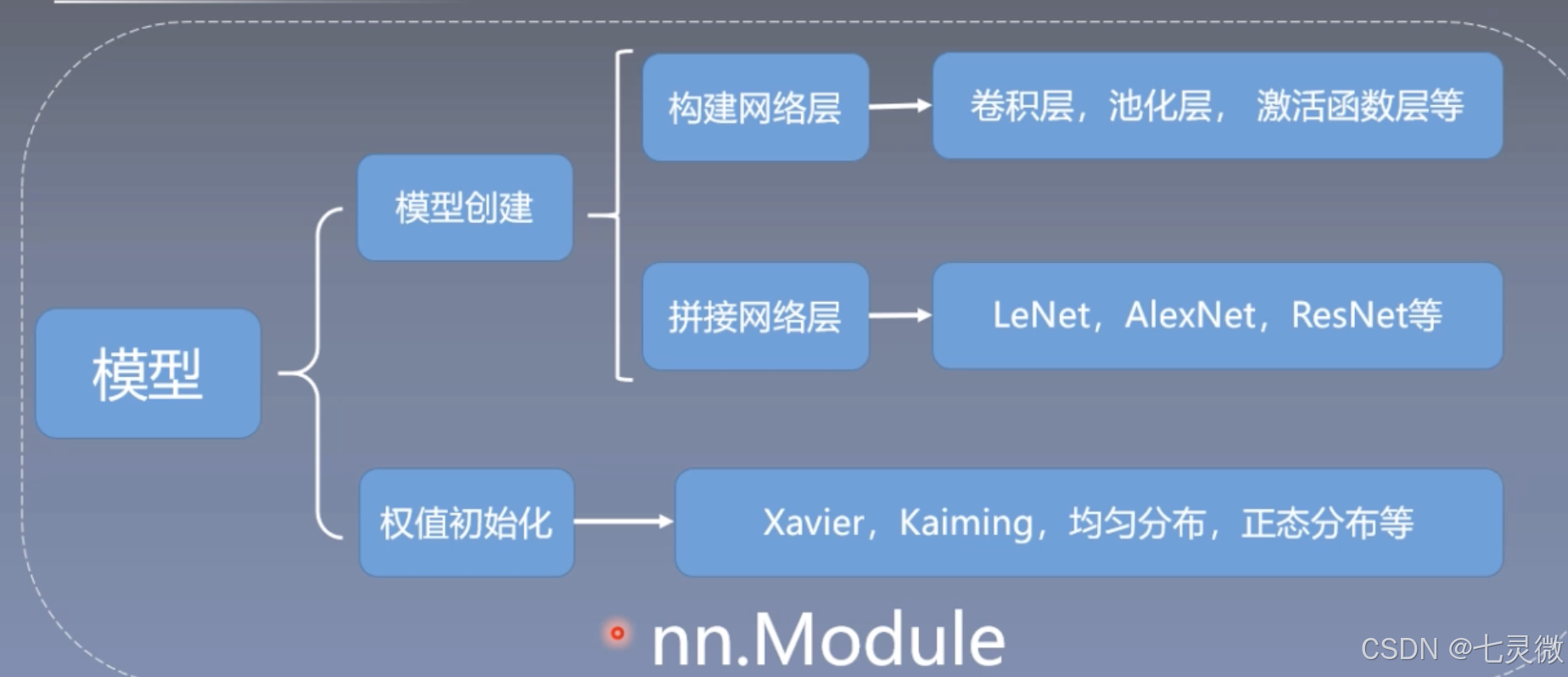
模型
模型训练基本步骤:数据->模型->损失函数->优化器->迭代训练
线性回归
1.确定模型:y=wx+b 关系是线性的,需要求解w,b
2.选择损失函数 MSE均方差

3.求解梯度并更新w,b
w=w-LRw.grad 加上梯度的负方向 即减梯度正方向
b=b-LRw.grad
# -*- coding:utf-8 -*-
"""
@brief : 一元线性回归模型
"""
import torch
import matplotlib.pyplot as plt
torch.manual_seed(10)lr = 0.05 # 学习率 # 创建训练数据
x = torch.rand(20, 1) * 10 # x data (tensor), shape=(20, 1)
y = 2*x + (5 + torch.randn(20, 1)) # y data (tensor), shape=(20, 1)
#torch.randn(20, 1)是一些噪声# 构建初始化线性回归参数
w = torch.randn((1), requires_grad=True)
b = torch.zeros((1), requires_grad=True)for iteration in range(1000):# 前向传播wx = torch.mul(w, x)#w*xy_pred = torch.add(wx, b)#y_pred是预测值=w*x+b# 计算 MSE lossloss = (0.5 * (y - y_pred) ** 2).mean()#0.5这里是为了消掉求导中的系数2# 反向传播 得到梯度loss.backward()# 更新参数 即减掉lr * grad梯度b.data.sub_(lr * b.grad) w.data.sub_(lr * w.grad)# 清零张量的梯度 20191015增加w.grad.zero_()b.grad.zero_()# 绘图if iteration % 20 == 0:plt.cla() # 防止社区版可视化时模型重叠plt.scatter(x.data.numpy(), y.data.numpy())plt.plot(x.data.numpy(), y_pred.data.numpy(), 'r-', lw=5)plt.text(2, 20, 'Loss=%.4f' % loss.data.numpy(), fontdict={'size': 20, 'color': 'red'})plt.xlim(1.5, 10)plt.ylim(8, 28)plt.title("Iteration: {}\nw: {} b: {}".format(iteration, w.data.numpy(), b.data.numpy()))plt.pause(0.5)if loss.data.numpy() < 1:#loss小于1时停止迭代breakplt.show()逻辑回归
注意:是线性的二分类模型
模型表达式:y=f(wx+b), f(x)=1/(1+e^-x),f(x)成为sigmoid函数 又叫logistic函数,它会将输入的数据映射到0~1之间(概率)

如何二分类?通常将阈值设置为0.5,超过0.5为1,不足0.5为0

逻辑回归又名 对数几率回归,这里的几率对应y/(1-y)
ln[y/(1-y)]=wx+b 公式与逻辑回归表达式可以互相得到
对数回归:表达式lny=wx+b
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import numpy as np
torch.manual_seed(10)# ============================ step 1/5 生成数据 ============================
sample_nums = 100
mean_value = 1.7
bias = 1
n_data = torch.ones(sample_nums, 2)
x0 = torch.normal(mean_value * n_data, 1) + bias # 类别0 数据 shape=(100, 2)
#normal(mean,std)
y0 = torch.zeros(sample_nums) # 类别0 标签 shape=(100)
x1 = torch.normal(-mean_value * n_data, 1) + bias # 类别1 数据 shape=(100, 2)
y1 = torch.ones(sample_nums) # 类别1 标签 shape=(100)
train_x = torch.cat((x0, x1), 0)
train_y = torch.cat((y0, y1), 0)# ============================ step 2/5 选择模型 ============================
class LR(nn.Module):def __init__(self):super(LR, self).__init__()self.features = nn.Linear(2, 1)self.sigmoid = nn.Sigmoid()def forward(self, x):#前向传播x = self.features(x)x = self.sigmoid(x)return xlr_net = LR() # 实例化逻辑回归模型# ============================ step 3/5 选择损失函数 ============================
loss_fn = nn.BCELoss()#二分类交叉熵# ============================ step 4/5 选择优化器 ============================
lr = 0.01 # 学习率
optimizer = torch.optim.SGD(lr_net.parameters(), lr=lr, momentum=0.9)
#SGD随机梯度下降法
'''
关于momentum
SGD(Stochastic Gradient Descent,随机梯度下降)是一种常用的优化算法,用于训练机器学习模型。 Momentum 是SGD的一种变体,它引入了一个动量项(momentum term),目的是为了加速收敛并减少震荡。简单来说,Momentum会在每一次更新方向上考虑历史的梯度信息,而不是仅仅基于当前的梯度。
这个动量项会让模型偏向于沿之前梯度的方向移动,如果之前的方向是有利的,那么在后续迭代中会保持这种趋势,有助于避免陷入局部最优。
'''
# ============================ step 5/5 模型训练 ============================
for iteration in range(1000):# 前向传播:将数据输入给模型y_pred = lr_net(train_x)# 计算 lossloss = loss_fn(y_pred.squeeze(), train_y)# 反向传播loss.backward()# 更新参数optimizer.step()# 清空梯度optimizer.zero_grad()# 绘图if iteration % 20 == 0:mask = y_pred.ge(0.5).float().squeeze() # 以0.5为阈值进行分类correct = (mask == train_y).sum() # 计算正确预测的样本个数acc = correct.item() / train_y.size(0) # 计算分类准确率plt.scatter(x0.data.numpy()[:, 0], x0.data.numpy()[:, 1], c='r', label='class 0')plt.scatter(x1.data.numpy()[:, 0], x1.data.numpy()[:, 1], c='b', label='class 1')w0, w1 = lr_net.features.weight[0]w0, w1 = float(w0.item()), float(w1.item())plot_b = float(lr_net.features.bias[0].item())plot_x = np.arange(-6, 6, 0.1)plot_y = (-w0 * plot_x - plot_b) / w1plt.xlim(-5, 7)plt.ylim(-7, 7)plt.plot(plot_x, plot_y)plt.text(-5, 5, 'Loss=%.4f' % loss.data.numpy(), fontdict={'size': 20, 'color': 'red'})plt.title("Iteration: {}\nw0:{:.2f} w1:{:.2f} b: {:.2f} accuracy:{:.2%}".format(iteration, w0, w1, plot_b, acc))plt.legend()plt.show()plt.pause(0.5)if acc > 0.99:break
LeNet
conv1->pool1->conv2->pool2->fc1->fc2->fc3

forward:从左往右的顺序,前向传播;反之为backward
AlexNet


features部分是卷积池化
classfier部分是全联接
Alexnet是分组卷积,原因是受制于硬件,因为它用了两个GPU进行训练。如上图结构所示,一张图片分成上下两组卷积进行,直到最后全连接时上下两组才连接起来。
class AlexNet(nn.Module):def __init__(self, num_classes: int = 1000, dropout: float = 0.5) -> None:super().__init__()_log_api_usage_once(self)self.features = nn.Sequential(nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=3, stride=2),nn.Conv2d(64, 192, kernel_size=5, padding=2),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=3, stride=2),nn.Conv2d(192, 384, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(384, 256, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.Conv2d(256, 256, kernel_size=3, padding=1),nn.ReLU(inplace=True),nn.MaxPool2d(kernel_size=3, stride=2),)self.avgpool = nn.AdaptiveAvgPool2d((6, 6))self.classifier = nn.Sequential(nn.Dropout(p=dropout),nn.Linear(256 * 6 * 6, 4096),#全连接nn.ReLU(inplace=True),nn.Dropout(p=dropout),nn.Linear(4096, 4096),nn.ReLU(inplace=True),nn.Linear(4096, num_classes),)def forward(self, x: torch.Tensor) -> torch.Tensor:x = self.features(x)x = self.avgpool(x)x = torch.flatten(x, 1)x = self.classifier(x)return x# 4 AlexNet
alexnet = torchvision.models.AlexNet()
构建模块
构建模块需要构建子模块(在__init__()),拼接子模块(在forward())。
所有的模型、网络层都是继承nn.Module

nn.Module总结:
- 一个module可以包含多个子module,比如说convNd,pool都是一个module,区别在于这种子module的module属性为空,即它们没有子模块了
- 一个module相当于一个运算,必须实现forward()
- 每个module都有8个字典管理它的属性;例如,执行module的init创建self.conv2时就会进入__setattr__判断传参类型,如果是parameter则加入到parameters字典中,其key==[该参数],如果是module则加入到modules字典中,其key==[conv2];(细节可以通过源码debug来查看)
nn.Module的属性有

以下是与hooks有关的字典:

class LeNet(nn.Module):def __init__(self, classes):super(LeNet, self).__init__()#这里实现了调用父类的init()self.conv1 = nn.Conv2d(3, 6, 5)#这些都可以debug之后step in 看一下它继续往哪个代码底层执行,了解代码原理self.conv2 = nn.Conv2d(6, 16, 5)self.fc1 = nn.Linear(16*5*5, 120)self.fc2 = nn.Linear(120, 84)self.fc3 = nn.Linear(84, classes)def forward(self, x):out = F.relu(self.conv1(x))out = F.max_pool2d(out, 2)out = F.relu(self.conv2(out))out = F.max_pool2d(out, 2)out = out.view(out.size(0), -1)out = F.relu(self.fc1(out))out = F.relu(self.fc2(out))out = self.fc3(out)return outdef initialize_weights(self):for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.xavier_normal_(m.weight.data)if m.bias is not None:m.bias.data.zero_()elif isinstance(m, nn.BatchNorm2d):m.weight.data.fill_(1)m.bias.data.zero_()elif isinstance(m, nn.Linear):nn.init.normal_(m.weight.data, 0, 0.1)m.bias.data.zero_()
# -*- coding: utf-8 -*-
"""
# @file name : create_module.py
# @brief : 学习模型创建学习
"""
import os
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
import numpy as np
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
import torchvision.transforms as transforms
import torch.optim as optim
from matplotlib import pyplot as plt
path_lenet = os.path.abspath(os.path.join(BASE_DIR, "..", "..", "model", "lenet.py"))
path_tools = os.path.abspath(os.path.join(BASE_DIR, "..", "..", "tools", "common_tools.py"))
assert os.path.exists(path_lenet), "{}不存在,请将lenet.py文件放到 {}".format(path_lenet, os.path.dirname(path_lenet))
assert os.path.exists(path_tools), "{}不存在,请将common_tools.py文件放到 {}".format(path_tools, os.path.dirname(path_tools))import sys
hello_pytorch_DIR = os.path.abspath(os.path.dirname(__file__)+os.path.sep+".."+os.path.sep+"..")
sys.path.append(hello_pytorch_DIR)from model.lenet import LeNet
from tools.my_dataset import RMBDataset
from tools.common_tools import set_seedset_seed() # 设置随机种子
rmb_label = {"1": 0, "100": 1}# 参数设置
MAX_EPOCH = 10
BATCH_SIZE = 16
LR = 0.01
log_interval = 10
val_interval = 1# ============================ step 1/5 数据 ============================
split_dir = os.path.abspath(os.path.join(BASE_DIR, "..", "..", "data", "rmb_split"))
if not os.path.exists(split_dir):raise Exception(r"数据 {} 不存在, 回到lesson-06\1_split_dataset.py生成数据".format(split_dir))
train_dir = os.path.join(split_dir, "train")
valid_dir = os.path.join(split_dir, "valid")norm_mean = [0.485, 0.456, 0.406]
norm_std = [0.229, 0.224, 0.225]train_transform = transforms.Compose([transforms.Resize((32, 32)),transforms.RandomCrop(32, padding=4),transforms.ToTensor(),transforms.Normalize(norm_mean, norm_std),
])valid_transform = transforms.Compose([transforms.Resize((32, 32)),transforms.ToTensor(),transforms.Normalize(norm_mean, norm_std),
])# 构建MyDataset实例
train_data = RMBDataset(data_dir=train_dir, transform=train_transform)
valid_data = RMBDataset(data_dir=valid_dir, transform=valid_transform)# 构建DataLoder
train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
valid_loader = DataLoader(dataset=valid_data, batch_size=BATCH_SIZE)# ============================ step 2/5 模型 ============================
net = LeNet(classes=2)
net.initialize_weights()# ============================ step 3/5 损失函数 ============================
criterion = nn.CrossEntropyLoss() # 选择损失函数# ============================ step 4/5 优化器 ============================
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9) # 选择优化器
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.1) # 设置学习率下降策略# ============================ step 5/5 训练 ============================
train_curve = list()
valid_curve = list()for epoch in range(MAX_EPOCH):loss_mean = 0.correct = 0.total = 0.net.train()for i, data in enumerate(train_loader):# forwardinputs, labels = dataoutputs = net(inputs)# backwardoptimizer.zero_grad()loss = criterion(outputs, labels)loss.backward()# update weightsoptimizer.step()# 统计分类情况_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).squeeze().sum().numpy()# 打印训练信息loss_mean += loss.item()train_curve.append(loss.item())if (i+1) % log_interval == 0:loss_mean = loss_mean / log_intervalprint("Training:Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(epoch, MAX_EPOCH, i+1, len(train_loader), loss_mean, correct / total))loss_mean = 0.scheduler.step() # 更新学习率# validate the modelif (epoch+1) % val_interval == 0:correct_val = 0.total_val = 0.loss_val = 0.net.eval()with torch.no_grad():for j, data in enumerate(valid_loader):inputs, labels = dataoutputs = net(inputs)loss = criterion(outputs, labels)_, predicted = torch.max(outputs.data, 1)total_val += labels.size(0)correct_val += (predicted == labels).squeeze().sum().numpy()loss_val += loss.item()valid_curve.append(loss_val)print("Valid:\t Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(epoch, MAX_EPOCH, j+1, len(valid_loader), loss_val, correct / total))train_x = range(len(train_curve))
train_y = train_curvetrain_iters = len(train_loader)
valid_x = np.arange(1, len(valid_curve)+1) * train_iters*val_interval # 由于valid中记录的是epochloss,需要对记录点进行转换到iterations
valid_y = valid_curveplt.plot(train_x, train_y, label='Train')
plt.plot(valid_x, valid_y, label='Valid')plt.legend(loc='upper right')
plt.ylabel('loss value')
plt.xlabel('Iteration')
plt.show()# ============================ inference ============================BASE_DIR = os.path.dirname(os.path.abspath(__file__))
test_dir = os.path.join(BASE_DIR, "test_data")test_data = RMBDataset(data_dir=test_dir, transform=valid_transform)
valid_loader = DataLoader(dataset=test_data, batch_size=1)for i, data in enumerate(valid_loader):# forwardinputs, labels = dataoutputs = net(inputs)_, predicted = torch.max(outputs.data, 1)rmb = 1 if predicted.numpy()[0] == 0 else 100print("模型获得{}元".format(rmb))组织复杂网络
介绍容器containers,包装起来作为一个整体

可以利用sequential将LeNet划分成features,classifier两部分

可以发现sequential定义后的打印出来模型结构,里面不再是有name的,而是拿序号区分不同层的。所以要用字典形式构建,见下面代码中class LeNetSequential 和class LeNetSequentialOrderDict的区别。





# -*- coding: utf-8 -*-
"""
# @file name : module_containers.py
# @brief : 模型容器——Sequential, ModuleList, ModuleDict
"""
import torch
import torchvision
import torch.nn as nn
from collections import OrderedDict# ============================ Sequential
class LeNetSequential(nn.Module):def __init__(self, classes):super(LeNetSequential, self).__init__()self.features = nn.Sequential(nn.Conv2d(3, 6, 5),nn.ReLU(),nn.MaxPool2d(kernel_size=2, stride=2),nn.Conv2d(6, 16, 5),nn.ReLU(),nn.MaxPool2d(kernel_size=2, stride=2),)self.classifier = nn.Sequential(nn.Linear(16*5*5, 120),nn.ReLU(),nn.Linear(120, 84),nn.ReLU(),nn.Linear(84, classes),)def forward(self, x):x = self.features(x)#自己定义的sequentialx = x.view(x.size()[0], -1)x = self.classifier(x)#自己定义的sequentialreturn xclass LeNetSequentialOrderDict(nn.Module):def __init__(self, classes):super(LeNetSequentialOrderDict, self).__init__()self.features = nn.Sequential(OrderedDict({'conv1': nn.Conv2d(3, 6, 5),'relu1': nn.ReLU(inplace=True),'pool1': nn.MaxPool2d(kernel_size=2, stride=2),'conv2': nn.Conv2d(6, 16, 5),'relu2': nn.ReLU(inplace=True),'pool2': nn.MaxPool2d(kernel_size=2, stride=2),}))self.classifier = nn.Sequential(OrderedDict({'fc1': nn.Linear(16*5*5, 120),'relu3': nn.ReLU(),'fc2': nn.Linear(120, 84),'relu4': nn.ReLU(inplace=True),'fc3': nn.Linear(84, classes),}))def forward(self, x):x = self.features(x)x = x.view(x.size()[0], -1)x = self.classifier(x)return x# net = LeNetSequential(classes=2)
# net = LeNetSequentialOrderDict(classes=2)
#
# fake_img = torch.randn((4, 3, 32, 32), dtype=torch.float32)
#
# output = net(fake_img)
#
# print(net)
# print(output)# ============================ ModuleListclass ModuleList(nn.Module):def __init__(self):super(ModuleList, self).__init__()self.linears = nn.ModuleList([nn.Linear(10, 10) for i in range(20)])# # 输入特征数为10,输出特征数为10def forward(self, x):for i, linear in enumerate(self.linears):x = linear(x)return x# net = ModuleList()
#
# print(net)
#
# fake_data = torch.ones((10, 10))
#
# output = net(fake_data)
#
# print(output)# ============================ ModuleDictclass ModuleDict(nn.Module):def __init__(self):super(ModuleDict, self).__init__()self.choices = nn.ModuleDict({'conv': nn.Conv2d(10, 10, 3),'pool': nn.MaxPool2d(3)})self.activations = nn.ModuleDict({'relu': nn.ReLU(),'prelu': nn.PReLU()})def forward(self, x, choice, act):x = self.choices[choice](x)x = self.activations[act](x)return xnet = ModuleDict()fake_img = torch.randn((4, 10, 32, 32))output = net(fake_img, 'conv', 'relu')print(output)# 4 AlexNet
alexnet = torchvision.models.AlexNet()
初始化网络参数
梯度消失 or 梯度爆炸
消失原因:深层网络;不合适的损失函数
爆炸原因:权值初始化过大
解决方法:梯度剪切、权重正则化、激活函数改进、使用batchnorm、ResNet
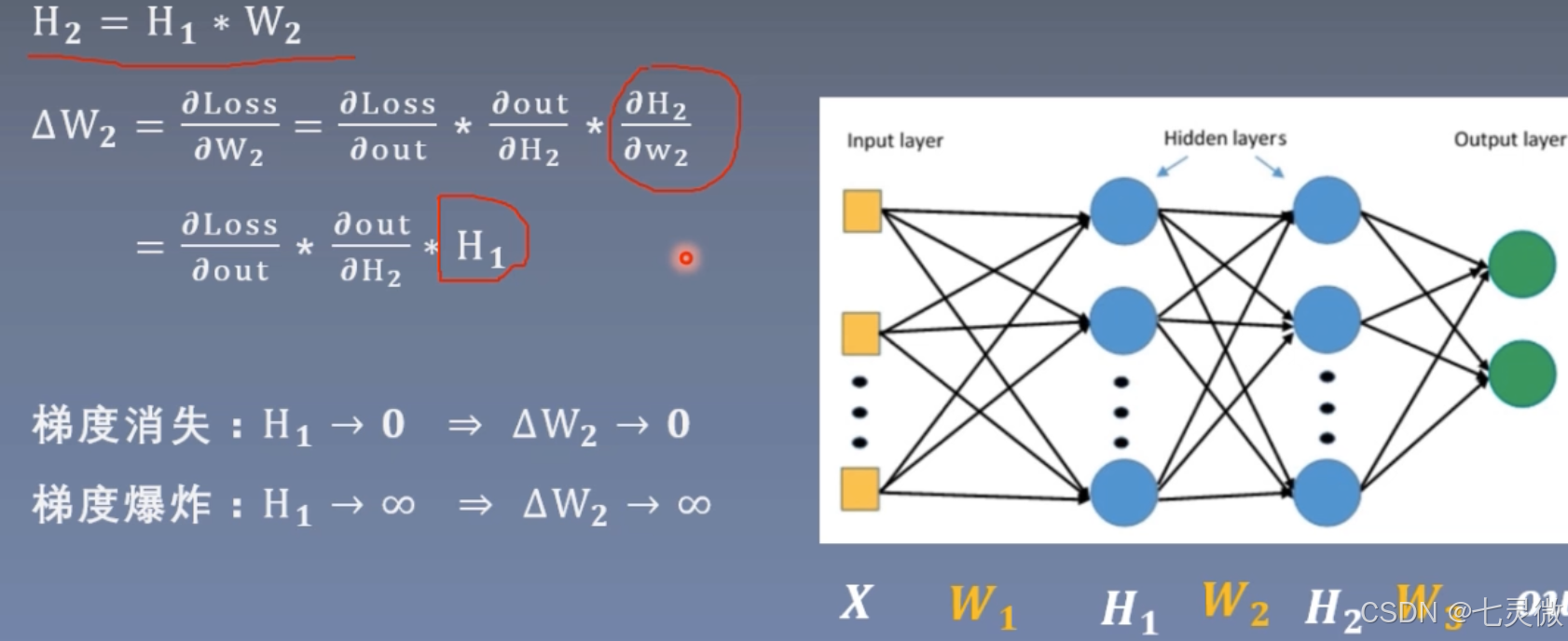
也就是说要控制网络层每一层输出不能太大,也不能太小。也就是说数据的方差不能过大过小,维持在1即可。

证明如下



红色圈起来的部分就是 想要让每次标准差std都稳定在1(左右),已知初始化D(xi)=1,则需要D(w)=1/n即可
通常Xavier 泽威尔采用均匀分布,如下图右边所示。

n_i是输入层的神经元个数,n_(i+1)是输出层的神经元个数。
当需要保持方差一致性(始终在1左右),则有上图公式推导。
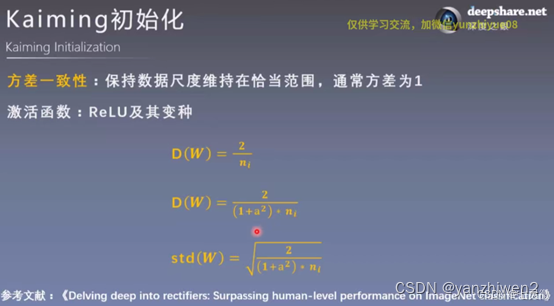
这里的a是负半轴的斜率,第二行是变种relu
"""
总结 这里首先初始化标准差为1,后面在31层就会变成nan
# @file name : grad_vanish_explod.py
# @brief : 梯度消失与爆炸实验
"""
import os
import torch
import random
import numpy as np
import torch.nn as nn
from tools.common_tools import set_seedset_seed(1) # 设置随机种子class MLP(nn.Module):def __init__(self, neural_num, layers):super(MLP, self).__init__()#构建100层线性层,每层有256个神经元self.linears = nn.ModuleList([nn.Linear(neural_num, neural_num, bias=False) for i in range(layers)]) self.neural_num = neural_numdef forward(self, x):for (i, linear) in enumerate(self.linears):x = linear(x)#xavier x=torch.tanh(x)#后面relu非饱和激活函数替换掉了饱和函数tanh等,用kaiming初始化替换掉对应的xavier初始化x = torch.relu(x)print("layer:{}, std:{}".format(i, x.std()))#判断是否为nanif torch.isnan(x.std()):print("output is nan in {} layers".format(i))breakreturn xdef initialize(self):#遍历每一个模块modulesfor m in self.modules():if isinstance(m, nn.Linear):#判断模块是否为线性层##初始值为标准正态分布,均值为0,标准差为1,但是每层的标准差会越来越大,发生std爆炸nn.init.normal_(m.weight.data) #标准正态分布进行初始化#均值为0,标准差为1,标准差会发生爆炸#此时的初始化权值可以使每层的均值为0,std为1.nn.init.normal_(m.weight.data, std=np.sqrt(1/self.neural_num)) #手动计算 Xavier# a = np.sqrt(6 / (self.neural_num + self.neural_num))
'''
计算激活函数的增益,
即增益值是指张量的数据输入到激活函数之后标准差的变化上下限的绝对值。
例如对于0均值,1标准差的数据而言,经过激活函数tanh之后,标准差会减少5/3倍左右,如果对与经过激活函数后的数据进行增益变换(一般来说是乘上增益系数),可以使当前模块和激活函数连续作用后的输出张量元素分布服从一个比较合理的值。
'''# tanh_gain = nn.init.calculate_gain('tanh')# a *= tanh_gain#设置均匀分布来初始化权值# nn.init.uniform_(m.weight.data, -a, a)#自动计算nn.init.xavier_uniform_(m.weight.data, gain=nn.init.calculate_gain('tanh'))#手动计算 这个是kaiming初始化,此时a==0# nn.init.normal_(m.weight.data, std=np.sqrt(2 / self.neural_num))#自动计算nn.init.kaiming_normal_(m.weight.data)flag = 0
# flag = 1if flag:layer_nums = 100 #100层神经网络neural_nums = 256 #每一层神经元个数为256batch_size = 16 net = MLP(neural_nums, layer_nums)net.initialize() #初始化weight.datainputs = torch.randn((batch_size, neural_nums)) # 输入数据设置为标准正态分布normal: mean=0, std=1output = net(inputs)print(output)# ======================================= calculate gain =======================================# flag = 0
flag = 1if flag:x = torch.randn(10000) #标准正态分布创建10000个数据点out = torch.tanh(x)gain = x.std() / out.std() #gain是一个变化比例 输入数据的标准差/输出数据的标准差print('gain:{}'.format(gain))tanh_gain = nn.init.calculate_gain('tanh')print('tanh_gain in PyTorch:', tanh_gain)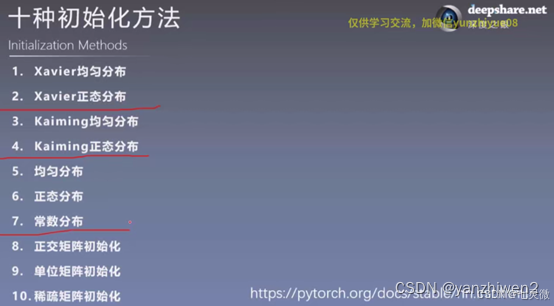
nn.init.calculate_gain(nonlinearity,param=None)
'''
计算激活函数方差变化尺度 =输入数据的方差/经过激活函数后输出数据的方差
nonlinearity:激活函数名称
param:激活函数参数 如Leaky ReLU的Negative_slop
'''
定义网络层
卷积层



下图是一个三维卷积:利用二维卷积在一张图片的3个通道上进行,最后叠加起来。

padding:可以利用它保持特征图shape不变
dilation:空洞卷积
尺寸计算:


torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
'''
(1)功能:对多个二维信号进行二维卷积;
(2)参数:
in_channels: 输入通道数;
out_channels: 输出通道数,等于卷积核的个数;
kernel_size: 卷积核的尺寸;
stride: 步长,stride步长是滑动时两个维度都一同滑动几个像素;
padding: 填充个数,保证输入和输出图像在尺寸上是匹配的;
dilation: 空洞卷积的大小;
groups: 分组卷积设置;
bias: 偏置;
'''set_seed(3) # 设置随机种子 随机种子不一样,之后nn.init.xavier_normal_初始化也不一样,导致图片卷积后的效果不同。# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "lena.png")
img = Image.open(path_img).convert('RGB') # 0~255 RGB# convert to tensor 张量
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# C*H*W to B*C*H*W 扩展成四维,增加batchsize维度
img_tensor.unsqueeze_(dim=0) # ================================= create convolution layer ==================================# ================ 2d
flag = 1
# flag = 0
if flag:#图像是RGB具有三个通道,因此in_channels=3,设置一个卷积核来观察out_channels=1,卷积核为3*3conv_layer = nn.Conv2d(3, 1, 3) # (in_channels, out_channels, 卷积核size) #打印可以发现conv2d的_parameters字典中的weight.shape为[1,3,3,3]#=(out_channels, in_channels , h, w) h,w是二维卷积核的尺寸nn.init.xavier_normal_(conv_layer.weight.data)#初始化# calculationimg_conv = conv_layer(img_tensor)# ================================= visualization ==================================
print("卷积前尺寸:{}\n卷积后尺寸:{}".format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap='gray')
plt.subplot(121).imshow(img_raw)
plt.show()转置卷积(常用于图像分割)
但最好不要称其为反卷积,因为卷积与其是不可逆的运算,虽然前后图像相转置的,但是权值不可逆。

假设图像shape 44, kernel 33, padding=0,stride=1
正常卷积:首先,将输入图像44拉成161的向量,其中16是44所有的像素;1是1张图片。
然后,卷积核33会变成416的矩阵,其中16是33=9个权值通过补0得到16个数;,4是根据图像尺寸、padding、stride、dilation等计算得到的输出图像中像素的总个数。
最后,卷积核矩阵乘以图像矩阵得到41,然后再reshape为22的输出特征图。
转置卷积:就是在正常卷积之后22 再转置回去44
首先,将输入图像22拉成41的向量,其中4是22=4得到的输入图像中所有像素的个数,1是1张图片。
然后,卷积核33会变成164的矩阵,其中4是33=9中剔除多余的剩下的4个,16是根据图像尺寸、padding、stride、dilation等计算得到的输出图像中像素的总个数。
最后,卷积核矩阵乘以图像矩阵得到161,然后再reshape为44的输出特征图。


尺寸计算公式刚好和卷积是相逆的。
反卷积过后会有棋盘效应,可以看到处理后图像像棋盘一样。

nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros', device=None, dtype=None)'''
参数同卷积参数
'''# -*- coding: utf-8 -*-
"""
# @file name : nn_layers_convolution.py
# @brief : 学习卷积层
"""
import os
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from matplotlib import pyplot as plt
from tools.common_tools import transform_invert, set_seedset_seed(3) # 设置随机种子# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "lena.png")
img = Image.open(path_img).convert('RGB') # 0~255 RGB# convert to tensor 张量
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# C*H*W to B*C*H*W 扩展成四维,增加batchsize维度
img_tensor.unsqueeze_(dim=0) # ================================= create convolution layer ==================================# ================ 2d
flag = 1
# flag = 0
if flag:#图像是RGB具有三个通道,因此in_channels=3,设置一个卷积核来观察out_channels=1,卷积核为3*3conv_layer = nn.Conv2d(3, 1, 3) # (in_channels, out_channels, 卷积核size) #初始化#weights:[1,3,3,3]=(out_channels, in_channels , h, w) h,w是二维卷积核的尺寸nn.init.xavier_normal_(conv_layer.weight.data)# calculationimg_conv = conv_layer(img_tensor)# ================ transposed
# flag = 1
flag = 0
if flag:conv_layer = nn.ConvTranspose2d(3, 1, 3, stride=2) #(in_channels, out_channels, 卷积核size) nn.init.xavier_normal_(conv_layer.weight.data)# calculationimg_conv = conv_layer(img_tensor)# ================================= visualization ==================================
print("卷积前尺寸:{}\n卷积后尺寸:{}".format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap='gray')
plt.subplot(121).imshow(img_raw)
plt.show()2d卷积一般用于图片,3d卷积一般用于视频,当做3d卷积时,需要在原先shape中间插入一个D-deep,作为图片帧数
img_tensor.unsqueeze_(dim=2) # B*C*H*W to B*C*D*H*Wconv_layer = nn.Conv3d(3, 1, (3, 3, 3), padding=(1, 0, 0), bias=False)#(3,3,3)分别表示deep方向的kernel大小,shape
'''
如果padding[0]不为1的话,
则deep方向上只有原图片,但是原图片的shape转变成
1*3*1*512*512,batchsize*channel*deep*height*width
显然 图片shape的deep方向1<kernel deep方向的3 程序会报错
当padding[0]为1的话,相当于在原图像前后各添加一层0,这样就3 >=kernel的deep方向3,就不会报错了
'''
3d卷积是在三个方向上卷积

池化层
对信号收集总结,使数量多到少,有maxpool/avgpool
nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
'''
kernel_size: 池化核的尺寸;
stride: 步长,stride步长是滑动时滑动几个像素;通常与kernel_size一致,不会去重叠。
padding: 填充个数,保证输入和输出图像在尺寸上是匹配的;
dilation: 空洞卷积的大小;
ceil_mode:尺寸取整,ceil_mode设置为True则为尺寸向上取整,默认为False即尺寸向下取整;
return_indices:记录最大值像素所在的位置的索引,通常用于最大值反池化上采样时使用;
'''set_seed(1) # 设置随机种子# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "lena.png")
img = Image.open(path_img).convert('RGB') # 0~255# convert to tensor
#c:通道,h:高,w:宽
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
img_tensor.unsqueeze_(dim=0) # C*H*W to B*C*H*W# ================================= create convolution layer ==================================# ================ maxpool
flag = 1
if flag:#stride步长通常与池化窗口大小2*2一致,保证池化时不会发生重叠maxpool_layer = nn.MaxPool2d((2, 2), stride=(2, 2)) img_pool = maxpool_layer(img_tensor)# ================================= visualization ==================================
print("池化前尺寸:{}\n池化后尺寸:{}".format(img_tensor.shape, img_pool.shape))
img_pool = transform_invert(img_pool[0, 0:3, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_pool)
plt.subplot(121).imshow(img_raw)
plt.show()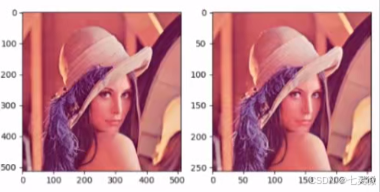
池化后照片没有啥区别,所以 池化常用于冗余信息的剔除并减少计算量。
最大值反池化就是利用return_indices将原先池化后的元素放到新区域的对应索引上,其他区域为0

nn.MaxUnpool2d(kernel_size, stride=None, padding=0)nn.AvgPool2d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True, divisor_override=None)
'''
ceil_mode:尺寸取整,ceil_mode设置为True则为尺寸向上取整,默认为False即尺寸向下取整;
count_include_pad:填充值是否用于计算;
divisor_override:除法因子,此时计算平均值时分母为divisor_override,本来是像素值的个数。平均值池化的图像相较于最大值池化的图像较暗淡,
(像素越大越亮 偏白)
因为像素值较小,最大值池化图像取得是最大值,
平均值池化图像取得是平均值。
'''set_seed(1) # 设置随机种子# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "lena.png")
img = Image.open(path_img).convert('RGB') # 0~255# convert to tensor
#c:通道,h:高,w:宽
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
img_tensor.unsqueeze_(dim=0) # C*H*W to B*C*H*W# ================================= create convolution layer ==================================# ================ max unpool
flag = 1
if flag:# poolingimg_tensor = torch.randint(high=5, size=(1, 1, 4, 4), dtype=torch.float) #生成尺寸为1*1*4*4的整数[0, 5)均匀分布maxpool_layer = nn.MaxPool2d((2, 2), stride=(2, 2), return_indices=True)img_pool, indices = maxpool_layer(img_tensor) #记录最大像素值的索引# unpooling#创建反池化层的输入,输入的尺寸与图片池化后的尺寸一致。img_reconstruct = torch.randn_like(img_pool, dtype=torch.float) #标准正态分布#构建反池化层(窗口、步长参数与池化层参数一一对应相等)maxunpool_layer = nn.MaxUnpool2d((2, 2), stride=(2, 2))#生成反池化后的图像img_unpool = maxunpool_layer(img_reconstruct, indices)print("raw_img:\n{}\nimg_pool:\n{}".format(img_tensor, img_pool))print("img_reconstruct:\n{}\nimg_unpool:\n{}".format(img_reconstruct, img_unpool))AdaptiveMaxPool2d和maxpooling层有什么区别呢?
Maxpool.
已知:input size, kernel, stride.
未知:Output size
AdaptiveMaxpool
已知 :input size, Output size
未知:kernel, stride
线性层(全连接层)
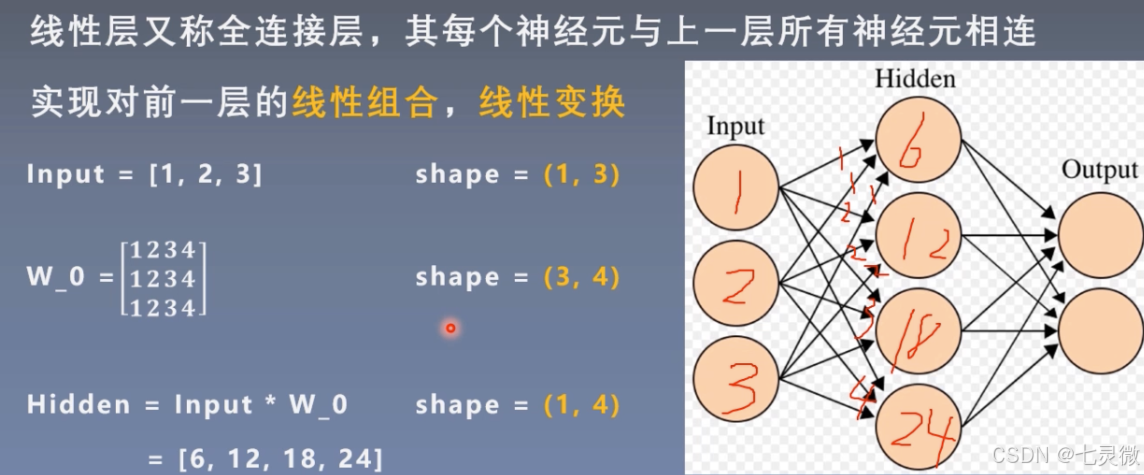
w_0第一行是input层第一个神经元传递给hidden层每个神经元的权值weight,同理…
如果有bias 还要加上bias。 y=wx+b
如果没有非线性激活函数,那么n层线性层==1层线性层
nn.Linear(in_features, out_features, bias=True, device=None, dtype=None)
'''
对一维信号(向量)进行线性组合;
参数:
in_features: 输入节点数;
in_features: 输出节点数;
bias: 是否需要偏置,默认为True;
'''# ================ linear
flag = 1
if flag:inputs = torch.tensor([[1., 2, 3]]) #1*3linear_layer = nn.Linear(3, 4) #输入节点3个,输出节点4个#w权值矩阵为4*3,每一行代表一个神经元与上一层神经元连接的权值。linear_layer.weight.data = torch.tensor([[1., 1., 1.],[2., 2., 2.],[3., 3., 3.],[4., 4., 4.]])linear_layer.bias.data.fill_(0.5)output = linear_layer(inputs)print(inputs, inputs.shape)print(linear_layer.weight.data, linear_layer.weight.data.shape)#output=inputs*w^T+biasprint(output, output.shape) #输出的尺寸为1*4激活函数层
- nn.Sigmoid
这个在逻辑回归里见过。

橙色曲线是其导数图像。
(1)多个网络层叠加后,导数范围会变得更小,甚至消失。
(2)输出不是0均值分布,破坏了数据分布。 - nn.Tanh

这个公式是怎么推导的?

导数<0时,网络非常深时,同样会梯度消失。 - nn.ReLu()修正线性单元

当多层网络不断使梯度叠加,会导致梯度爆炸;当累乘时可以缓解梯度消失。

nn.LeakyReLU(negative_slope=0.01, inplace=False)
LeakyReLU的slope参数0.01表示:负半轴0.01的斜率.

nn.PReLU(num_parameters=1, init=0.25, device=None, dtype=None)

num_parameters(整数):可学习参数 a 的数量,只有两种选择,要么定义成1,表示在所有通道上应用相同的 a进行激活,要么定义成输入数据的通道数,表示在所有通道上应用不同的 a进行激活,默认1。init(float):a的初始值输入数据的第二维度表示为通道维度,当输入维度小于2时,不存在通道维度,此时默认通道数为1通过调用.weight方法来取出参数a
即使有多个 a,init也还是只能输入一个float类型的数
nn.RReLU(lower=0.125, upper=0.3333333333333333, inplace=False)
RReLU:斜率是随机的,符合均匀分布.
相关文章:
【AI】Pytorch_模型构建
建议点赞收藏关注!持续更新至pytorch大部分内容更完。 本文已达到10w字,故按模块拆开,详见目录导航。 整体框架如下 数据及预处理 模型及其构建 损失函数及优化器 本节目录 模型线性回归逻辑回归LeNetAlexNet 构建模块组织复杂网络初始化网络…...

FFmpeg源码:avcodec_descriptor_get函数分析
一、avcodec_descriptor_get函数的声明 avcodec_descriptor_get函数声明在FFmpeg源码(本文演示用的FFmpeg源码版本为7.0.1)的头文件libavcodec/codec_desc.h中: /*** return descriptor for given codec ID or NULL if no descriptor exist…...

为数据仓库构建Zero-ETL无缝集成数据分析方案(下篇)
对于从事数据分析的小伙伴们来说,最头疼的莫过于数据处理的阶段。在我们将数据源的原始数据导入数据仓储进行分析之前,我们通常需要进行ETL流程对数据格式进行统一转换,这个流程需要分配专业数据工程师基于业务情况完成,整个过程十…...

ElMessageBox消息确认框组件在使用时如何设置第三个或多个自定义按钮
ElMessageBox自带两个按钮一个确认一个取消,当还想使用该组件还想再加个功能组件时,就需要自定义个按钮加到组件里 第二种方法可以通过编写自定义弹窗来完成,个人觉得代码量增多过于繁琐,当然也可以实现 先定义方法负责获取dom父节点,创建新的子元素加…...

javaWeb【day04】--(MavenSpringBootWeb入门)
01. Maven课程介绍 1.1 课程安排 学习完前端Web开发技术后,我们即将开始学习后端Web开发技术。做为一名Java开发工程师,后端Web开发技术是我们学习的重点。 1.2 初识Maven 1.2.1 什么是Maven Maven是Apache旗下的一个开源项目,是一款用于…...
[Linux]:文件(下)
✨✨ 欢迎大家来到贝蒂大讲堂✨✨ 🎈🎈养成好习惯,先赞后看哦~🎈🎈 所属专栏:Linux学习 贝蒂的主页:Betty’s blog 1. 重定向原理 在明确了文件描述符的概念及其分配规则后,我们就可…...

【学习笔记】手写Tomcat 一
目录 HTTP协议请求格式 HTTP协议响应格式 Socket 解读代码 服务端优化 解读代码 作业 1. 响应一个 HTML 页面给客户端,游览器把接收到的内容进行渲染 2. 文件的媒体类型是写死的,肯定不行,怎么变成动态? 昨天作业答案 …...

springboot基础-Druid数据库连接池使用
文章目录 引入Druid组件(maven)配置数据源Druid配置项1. 数据源配置2. 监控配置3. 安全配置4. SQL拦截配置 示例配置相关地址 Druid是阿里巴巴开源的一个高性能的Java数据库连接池组件,它提供了强大的监控统计功能和工具支持。Druid不仅可以作…...

C语言文件操作全攻略:从打开fopen到读写r,w,一网打尽
前言 在C语言中,文件操作是一项基础而强大的功能,它允许程序与存储在硬盘上的数据进行交互。无论是读取配置文件、处理日志文件,还是创建新的数据文件,C语言都提供了丰富的函数库来支持这些操作。本文将整合并详细介绍fopen(), 对…...

【0328】Postgres内核之 “User ID state”
1. User ID state 我们必须追踪与“用户ID(user ID)”概念相关的多个不同值。Postgres内核中有共有以下几个 User ID。 ✔ AuthenticatedUserId ✔ SessionUserId ✔ OuterUserId ✔ CurrentUserId 1.1 User ID 概念相关的不同值 AuthenticatedUserId AuthenticatedUserId…...

VisualStudio环境搭建C++
Visual Studio环境搭建 说明 C程序编写中,经常需要链接头文件(.h/.hpp)和源文件(.c/.cpp)。这样的好处是:控制主文件的篇幅,让代码架构更加清晰。一般来说头文件里放的是类的申明,函数的申明,全局变量的定义等等。源…...

linux 文件压缩并且切割压缩
Linux系统中,split命令是一个非常实用的工具,它可以将一个大文件分割成多个小文件 1、先将文件压缩 tar -cvf access.log.tar.gz access2、将文件压缩为每500mb一个文件,-b 500m 指定了每个分割文件的大小为500MB,-d 表示使用数字…...

支持iPhone 16新品预售,饿了么同步上线专人配送等特色服务
9月10日凌晨,2024年 Apple 秋季新品发布会上正式揭晓iPhone 16新机。9月10日一早,饿了么同步宣布:今年将携手近4000家Apple 授权专营店,支持iPhone 16新品预售及现货的同步开售。新机现货首发当日,饿了么消费者最快半小…...

低光增强效果展示
训练模型给图片加标题...

李诞-2021.8脱口秀工作手册-11-pitch your idea把一个想法扎进别人脑子里;专业,做足准备,给选择option!
17 每个人都该学会卖掉自己的想法 要把一件事办妥,就要有把一个想法扎进别人脑子里的决心。 很早之前,我跟编剧鬼顾达去见一个非常非常不好合作的嘉宾,我们本来带去了一份很好的稿子,他不愿意接受,反复抗议ÿ…...

vue3 自定义指令 directive
1、官方说明:https://cn.vuejs.org/guide/reusability/custom-directives 除了 Vue 内置的一系列指令 (比如 v-model 或 v-show) 之外,Vue 还允许你注册自定义的指令 (Custom Directives)。 我们已经介绍了两种在 Vue 中重用代码的方式:组件和…...

为什么腾讯难以再现《黑神话:悟空》这样的游戏大作?
自《黑神话:悟空》发布以来,它凭借令人惊艳的画面和深入人心的故事情节,迅速在全球范围内收获了大量粉丝。这款游戏的成功,不仅让全球玩家看到了国产游戏的新高度,也让许多人开始好奇:作为中国游戏行业的巨头,腾讯为什么没能推出类似《黑神话:悟空》这样震撼的作品?今…...

C# WPF燃气报警器记录读取串口工具
C# WPF燃气报警器记录读取串口工具 概要串口帧数据布局文件代码文件运行效果源码下载 概要 符合国标文件《GB15322.2-2019.pdf》串口通信协议定义;可读取燃气报警器家用版设备历史记录信息等信息; 串口帧数据 串口通信如何确定一帧数据接收完成是个…...

【IEEE独立出版 | 往届快至会后2个月检索,刊后1个月检索】2024年第四届电子信息工程与计算机科学国际会议(EIECS 2024)
在线投稿:学术会议-学术交流征稿-学术会议在线-艾思科蓝 电子信息的出现与计算机技术、通信技术和高密度存储技术的迅速发展并在各个领域里得到广泛应用有着密切关系。作为高技术领域中重要的前沿技术之一,电子信息工程具有前瞻性、先导性的特点&#x…...
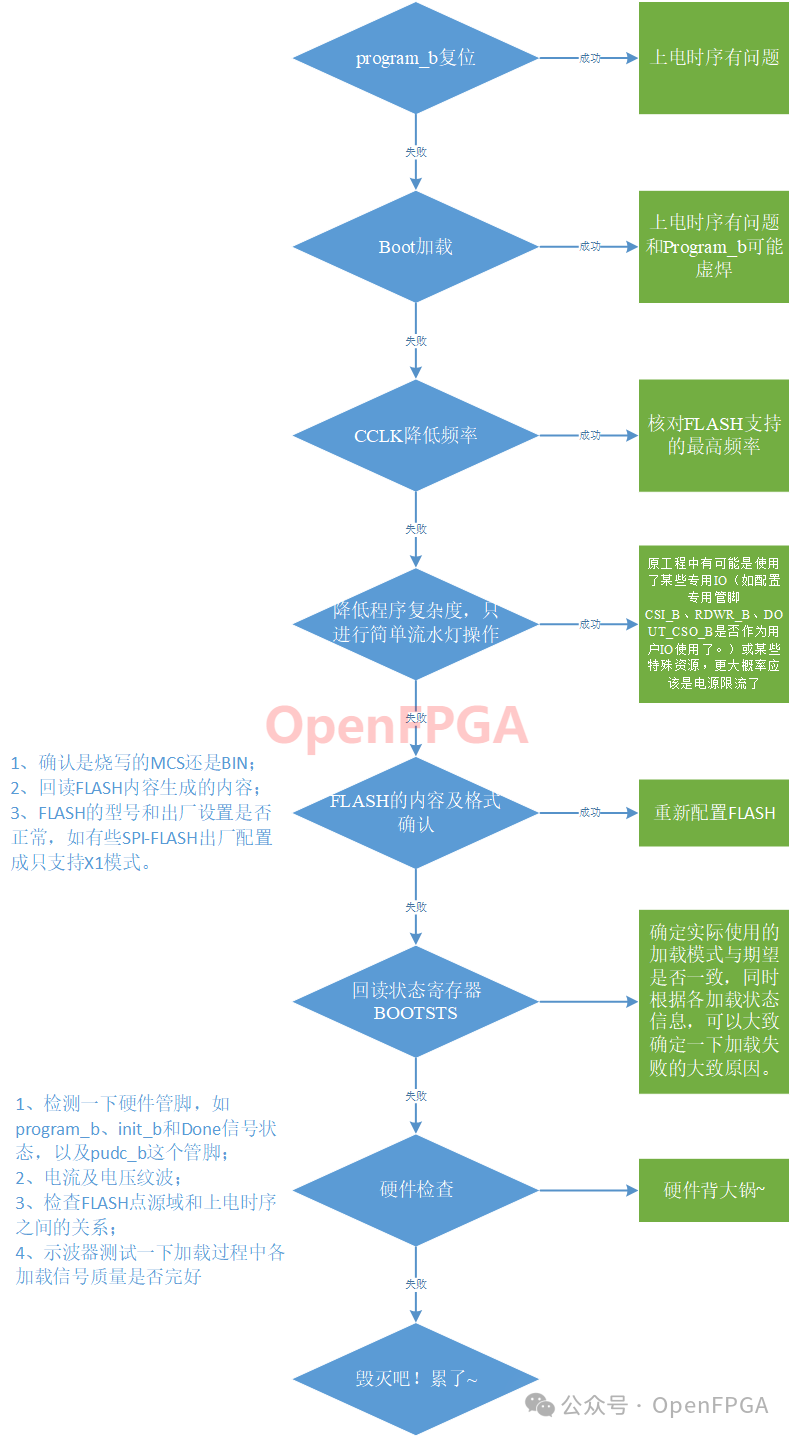
FPGA实现串口升级及MultiBoot(三)FPGA启动加载方式
缩略词索引: K7:Kintex 7V7:Vertex 7A7:Artix 7 上一篇中介绍了FPGA的启动步骤,如图0 所示,今天这篇文章就要在上一篇文章基础上进行分支细化,首先我们先了解FPGA 启动加载的几种方式。同时对于我们设计中常见的几个问题将在文章最…...

从规范到验证:构建企业级环境变量与密钥安全管理体系
1. 项目概述:从“裸奔”到“装甲车”的密钥管理进化在开发一个现代应用时,我们几乎不可避免地要和一堆敏感信息打交道:数据库密码、API密钥、第三方服务的访问令牌、加密盐值……这些信息,我们通常称之为“环境变量”或“密钥”。…...

淘宝要接入AI购物助手:以后买东西,可能不是搜索,而是“让AI帮你挑”
最近AI圈有一个很值得关注的新热点。据路透社5月10日报道,阿里巴巴正准备把通义千问Qwen接入淘宝,让用户可以通过和AI聊天的方式浏览、比较和购买商品,而不是像以前那样自己一个个翻商品列表。报道还提到,Qwen应用将接入淘宝和天猫…...
)
STM32L4低功耗实战:用RTC内部唤醒定时1秒,让设备续航翻倍(附CubeIDE配置)
STM32L4低功耗实战:RTC唤醒中断与CubeIDE配置全解析 在电池供电的物联网终端设计中,每微安电流都关乎产品寿命。曾有个智能农业项目,原本预计6个月的传感器续航,因未优化低功耗模式,实际仅维持了3周。这促使我们深入研…...

从ShareGPT项目拆解现代全栈开发:Next.js、Serverless与Chrome扩展实战
1. 项目概述与核心价值如果你和我一样,经常在ChatGPT里进行一些天马行空的对话,从构思一部科幻小说的世界观,到一步步推导一个复杂的编程问题,再到让它扮演苏格拉底和你辩论哲学,这些对话记录本身就是宝贵的数字资产。…...

扩散模型如何重塑建筑设计流程:从概念生成到性能优化的AI协作
1. 项目概述:当AI成为建筑师的“副驾驶”几年前,当我在设计院通宵达旦地对着屏幕调整一个曲面屋顶的参数时,我就在想,有没有一种工具,能让我把脑子里那个模糊的意象,瞬间变成可供推敲的视觉草稿?…...

从零搭建短剧生成AI
当AI遇上短剧创作,会产生怎样的火花?从抖音的1分钟小剧场到YouTube的3分钟微电影,短剧已成为最受欢迎的内容形式之一。而AI,正在让这种创作变得触手可及。AI时代的内容创作革命在数字内容爆炸式增长的时代,短剧以其紧凑…...

ZeroAPI:基于订阅与任务感知的AI模型智能路由插件设计与实践
1. 项目概述:ZeroAPI,一个为AI订阅服务而生的智能路由插件如果你和我一样,手头订阅了不止一个AI服务——比如OpenAI的ChatGPT Plus、月之暗面的Kimi、智谱AI的GLM,可能还有MiniMax或者通义千问——那你一定遇到过这个烦恼…...

多渠道订单数据处理自动化,落地步骤与ERP打通方案 | 2026企业级智能体实战手册
在2026年的数字化转型深水区,企业面临的不再是“是否要自动化”的问题, 而是如何在高并发、多维度的全渠道业务压力下, 实现订单流、资金流与信息流的绝对同步。 传统的OMS(订单管理系统)与ERP(企业资源计划…...

超高清电视普及困境解析:从技术参数到生态系统的完整思考
1. 超高清电视的“非主流”开局:一场始于2013年的行业迷思 如果你在2013年初的拉斯维加斯CES展上,听到关于“Ultra HDTV”(超高清电视,后文简称UHDTV)的喧嚣,感觉就像身处一场盛大的交响乐彩排现场——乐手…...

APK Installer终极指南:如何在Windows上快速安装安卓应用?
APK Installer终极指南:如何在Windows上快速安装安卓应用? 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为Windows上安装安卓应用而烦恼吗…...