基于人工智能的自动驾驶系统项目教学指南
自动驾驶系统是人工智能的一个核心应用领域,涉及多个学科的交叉:从计算机视觉、深度学习、传感器融合到控制系统,自动驾驶项目可以提供高度的挑战性和实践意义。在这篇文章中,我们将构建一个基于深度学习的自动驾驶系统的简化版本。这个项目将通过视觉数据(即摄像头捕捉的道路图像)来实现基本的车道保持功能。我们将用到卷积神经网络(CNN)进行道路车道线的检测与分析。
本文将涵盖以下几个部分:
1. 项目背景与需求分析
2. 开发环境准备
3. 数据获取与处理
4. 模型构建与训练
5. 代码实现详解
6. 应用场景与扩展
7. 常见问题与解决方案
一、项目背景与需求分析
1.1 项目目标
自动驾驶是一个高度复杂的系统,包括感知、决策和控制三大模块。为了便于教学和开发,我们将项目目标简化为:
通过摄像头捕捉道路图像。
使用卷积神经网络(CNN)识别车道线,并预测车辆应保持的方向。
开发一个简单的仿真系统,使小车可以在仿真环境中行驶,并保持在车道中。
1.2 项目需求
为了实现基本的车道保持功能,系统需具备以下模块:
1. 数据输入模块:负责从摄像头或者仿真环境中获取图像。
2. 图像处理模块:对图像进行预处理(如灰度化、缩放、标准化等)。
3. 模型预测模块:通过神经网络模型,识别车道线并输出保持车道的方向。
4. 控制模块:根据模型的输出结果,控制车辆的转向角度。
5. 反馈模块:车辆在仿真环境中进行自主调整,并通过反馈机制不断优化。
二、开发环境准备
在开发自动驾驶项目之前,确保你的开发环境已经配置好相关的工具与库。以下是推荐的开发环境配置:
2.1 开发语言与工具
1. Python 3.x:Python作为主流的AI开发语言,拥有丰富的深度学习框架支持。
2. TensorFlow 2.x 或 PyTorch:这两个是目前最常用的深度学习框架,本文将以TensorFlow为例。
3. OpenCV:一个广泛用于计算机视觉的库,方便进行图像处理。
4. NumPy:用于数值计算和数组操作。
5. Matplotlib:用于可视化训练结果和图像。
6. 仿真环境:推荐使用[Udacity Car Simulator](https://github.com/udacity/selfdrivingcarsim)或其他自动驾驶仿真平台(如CARLA),这将有助于模拟自动驾驶的测试环境。
2.2 硬件需求
如果你要训练复杂的深度学习模型,建议使用GPU以加速训练过程。你可以使用NVIDIA的CUDA加速库,并确保安装相关的驱动。
2.3 环境搭建步骤
1. 安装Python环境:
sudo apt update
sudo apt install python3 python3pip
pip install virtualenv
virtualenv venv
source venv/bin/activate
安装必要的库:
pip install tensorflow opencvpython numpy matplotlib4. 安装仿真环境(如果使用Udacity的仿真器):
下载并安装Udacity Car Simulator的最新版本。
三、数据获取与处理
3.1 数据获取
为了实现自动驾驶中的车道保持功能,我们需要获取车辆前方道路的图像数据。可以通过以下几种方式获得数据:
1. 仿真数据:在仿真环境中驾驶车辆,记录摄像头采集的图像数据,以及对应的方向盘转向角度。
2. 公开数据集:你可以使用现成的车道检测数据集,例如[KITTI]
或Udacity提供的[自动驾驶数据集]
3.2 数据预处理
在进行模型训练之前,图像数据通常需要进行一定的预处理,以提高模型的泛化能力。
1. 图像缩放:将图像缩小到模型输入所需的尺寸(例如,64x64或128x128)。
2. 灰度化:如果不需要颜色信息,可以将彩色图像转换为灰度图像。
3. 标准化:将像素值标准化为[0, 1]区间,帮助加快模型的收敛速度。
以下是数据预处理的代码示例:
import cv2
import numpy as npdef preprocess_image(image):缩放图像到64x64
image = cv2.resize(image, (64, 64))转为灰度图
gray_image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)标准化
normalized_image = gray_image / 255.0
return normalized_image
四、模型构建与训练
4.1 模型设计
我们将构建一个卷积神经网络(CNN),用于处理输入的道路图像,并预测车辆应保持的方向。CNN在处理图像分类、检测等任务上表现出色,尤其适用于从图像中提取特征。
以下是一个简单的CNN模型架构:
import tensorflow as tf
from tensorflow.keras import layers, modelsdef create_model():
model = models.Sequential()第一层卷积层 + 池化层
model.add(layers.Conv2D(32, (3, 3), activation='relu', input_shape=(64, 64, 1)))
model.add(layers.MaxPooling2D((2, 2)))第二层卷积层 + 池化层
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))第三层卷积层 + 池化层
model.add(layers.Conv2D(128, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))Flatten展开层
model.add(layers.Flatten())全连接层
model.add(layers.Dense(64, activation='relu'))输出层:预测转向角度(假设输出为一个连续值)
model.add(layers.Dense(1))return model
4.2 模型训练
1. 损失函数:我们使用均方误差(MSE)作为损失函数,因为我们预测的是一个连续值(转向角度)。
2. 优化器:我们可以选择Adam优化器,它在很多深度学习任务中表现优越。
训练模型的代码如下:
def train_model(model, train_images, train_labels, epochs=10):
model.compile(optimizer='adam', loss='mean_squared_error')
model.fit(train_images, train_labels, epochs=epochs, batch_size=32, validation_split=0.2)
```4.3 模型评估
在训练完成后,你可以通过以下方式评估模型在测试集上的表现:
test_loss = model.evaluate(test_images, test_labels)
print(f"Test Loss: {test_loss}")
五、代码实现详解
5.1 数据管道搭建
我们首先需要从仿真器中获取图像,并将其输入到模型中:
def collect_training_data(simulator):
images = []
steering_angles = []for frame, steering_angle in simulator.get_data():
processed_image = preprocess_image(frame)
images.append(processed_image)
steering_angles.append(steering_angle)return np.array(images), np.array(steering_angles)
5.2 模型预测与控制
通过训练好的模型,我们可以在仿真环境中进行实时预测:
def predict_and_control(model, simulator):
for frame in simulator.get_data():
processed_image = preprocess_image(frame)
steering_angle = model.predict(np.expand_dims(processed_image, axis=0))
simulator.control_vehicle(steering_angle)
帮大家整理了人工智能的资料
包括人工智能的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!
点击领取更多人工智能详细资料
问题讨论,人工智能的资料领取可以私信!
六、应用场景与扩展
6.1 实时应用
该模型可以扩展到实际的自动驾驶中,通过搭载摄像头与其他传感器(如雷达、LIDAR)来获取实时道路信息,并做出相应的控制决策。
6.2 扩展功能
除了车道保持功能,自动驾驶系统还可以扩展以下功能:
1. 交通标志识别:使用神经网络识别交通标志,并根据标志调整车辆行为。
2. 障碍物检测:通过YOLO等目标检测算法检测前方的障碍物并规避。
3. 多传感器融合:结合多种传感器的数据,提高感知精度。
七、常见问题与解决方案
7.1 训练过拟合
问题:模型在训练集上表现良好,但在验证集上效果较差。
解决方案:
使用更多的数据进行训练。
加入L2正则化或Dropout层来防止模型过拟合。
7.2 预测结果不稳定
问题:模型在实时驾驶中预测的转向角度不稳定,导致车辆左右摆动。
解决方案:
对模型的输出进行平滑处理,避免突然的方向变化。
增加训练数据中的多样性,特别是包含不同道路条件的数据。
7.3 计算速度过慢
问题:实时预测时计算速度过慢,影响驾驶表现。
解决方案:
使用GPU加速模型预测。
使用更轻量级的神经网络结构,如MobileNet。
结语
通过本文的详细教学,你可以构建一个简化的自动驾驶系统。尽管该项目只涵盖了车道保持的功能,但它展示了从数据收集、预处理、模型设计、训练到实时控制的完整流程。随着技术的进步,自动驾驶系统将变得越来越智能和可靠。在这个基础上,你可以进一步拓展项目,增加更多复杂功能,如多车道识别、自动超车、障碍物回避等。
相关文章:

基于人工智能的自动驾驶系统项目教学指南
自动驾驶系统是人工智能的一个核心应用领域,涉及多个学科的交叉:从计算机视觉、深度学习、传感器融合到控制系统,自动驾驶项目可以提供高度的挑战性和实践意义。在这篇文章中,我们将构建一个基于深度学习的自动驾驶系统的简化版本…...
[Linux#49][UDP] 2w字详解 | socketaddr | 常用API | 实操:实现简易Udp传输
目录 套接字地址结构(sockaddr) 1.Socket API 2.sockaddr结构 3. sockaddr、sockaddr_in 和 sockaddr_un 的关系 sockaddr 结构体 sockaddr_in 结构体(IPv4 套接字地址) sockaddr_un 结构体(Unix域套接字地址&a…...

期权组合策略有什么风险?期权组合策略是什么?
今天期权懂带你了解期权组合策略有什么风险?期权组合策略是什么?期权组合策略是通过结合不同期权合约(如看涨期权和看跌期权),以及标的资产(如股票)来实现特定投资目标的策略。 期权组合策略市…...

从Zotero6到Zotero7的数据迁移尝试?(有错勿喷,多多指教!)
从Zotero6到Zotero7的数据迁移尝试 0 前言 之前在主机上一直用的Zotero6(实验室主机),最近发现在个人笔记本上看论文更频繁,尝试重新部署Zotero,才发现竟然更新了!所以这里简单记录一下数据迁移过程&…...
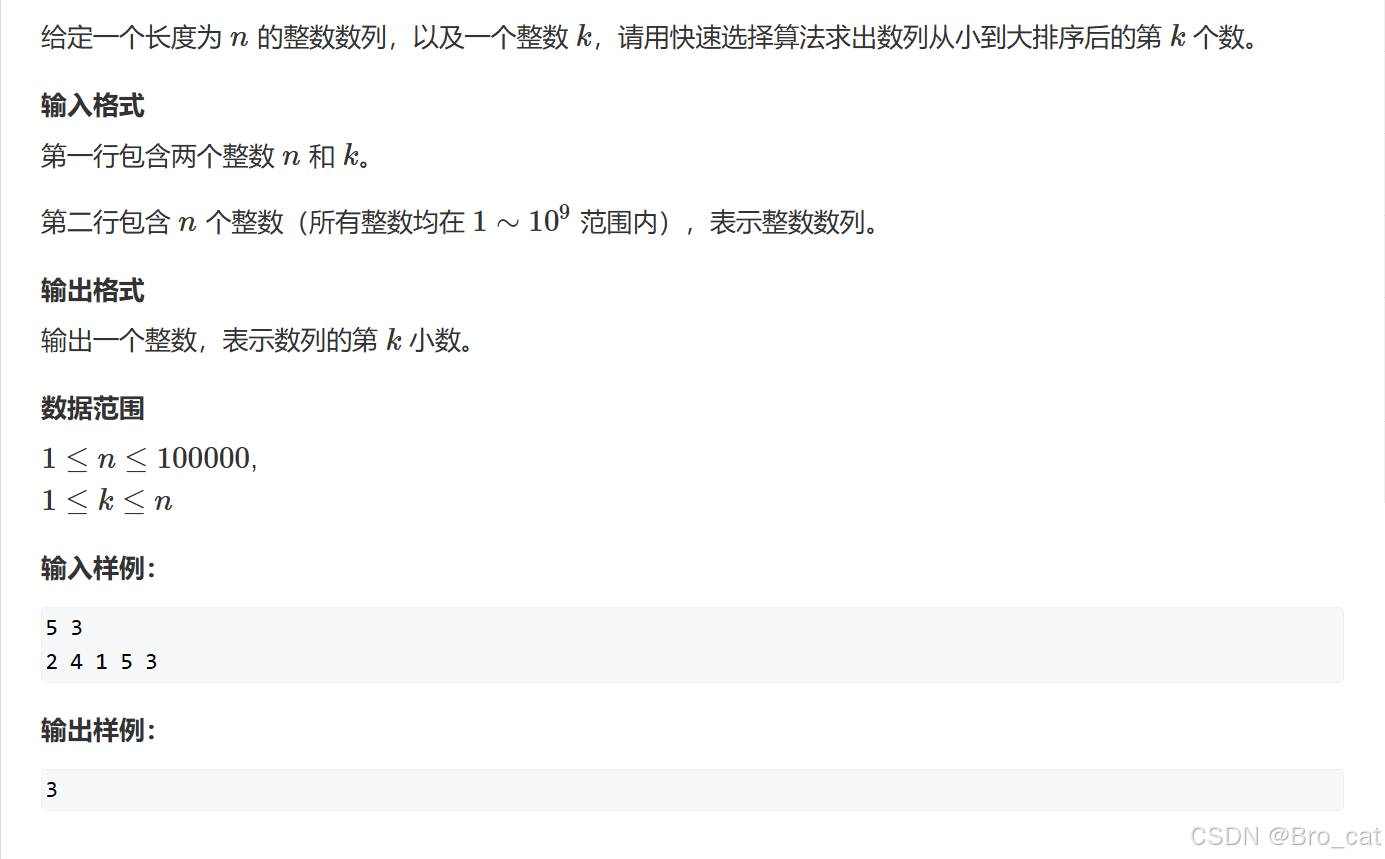
快速排序(分治思想)
什么是快速排序 快速排序(Quick Sort)是一种广泛使用的高效排序算法,由计算机科学家托尼霍尔在1960年提出。它采用分治法(Divide and Conquer)策略,将一个大数组分为两个小数组,然后递归地对这两…...

JAVA相关知识
JAVA基础知识 说一下对象创建的过程? 类加载检查:当Java虚拟机(JVM)遇到一个类的new指令时,它首先检查这个类是否已经被加载、链接和初始化。如果没有,JVM会通过类加载器(ClassLoaderÿ…...

详解TCP的三次握手
TCP(三次握手)是指在建立一个可靠的传输控制协议 (TCP) 连接时,客户端和服务器之间的三步交互过程。这个过程的主要目的是确保连接是可靠的、双方的发送与接收能力是正常的,并且可以开始数据传输。下面是对每个步骤的详细解释&…...
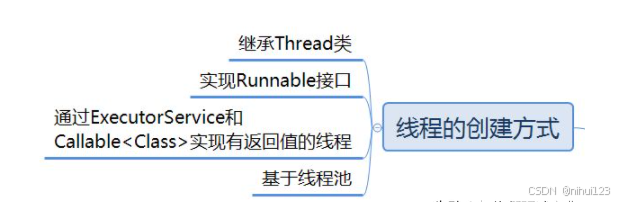
Java面试篇基础部分-Java创建线程详解
导语 多线程的方式能够在操作系统的多核配置上更好的利用服务器的多个CPU的资源,这样的操作可以使得程序运行起来更加高效。Java中多线程机制提供了在一个进程内并发去执行多个线程,并且每个线程都并行的去执行属于线程处理的自己的任务,这样可以提高程序的执行效率,让…...
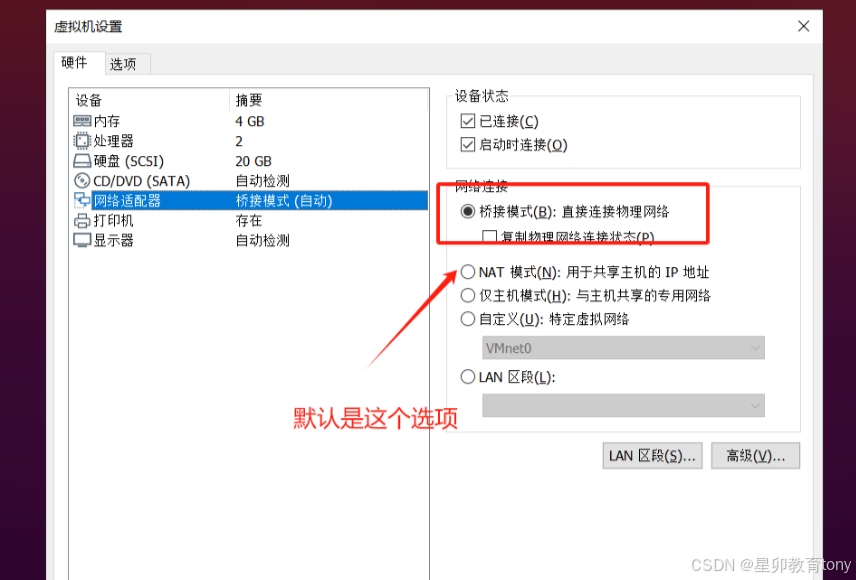
Ubuntu 20.04/22.04无法连接网络(网络图标丢失、找不到网卡)的解决方案
问题复述: Ubuntu 20.04无法连接到网络,网络连接图标丢失,网络设置中无网络设置选项。 解决方案 对于Ubuntu 20.04而言:逐条执行 sudo service network-manager stopsudo rm /var/lib/NetworkManager/NetworkManager.statesudo…...
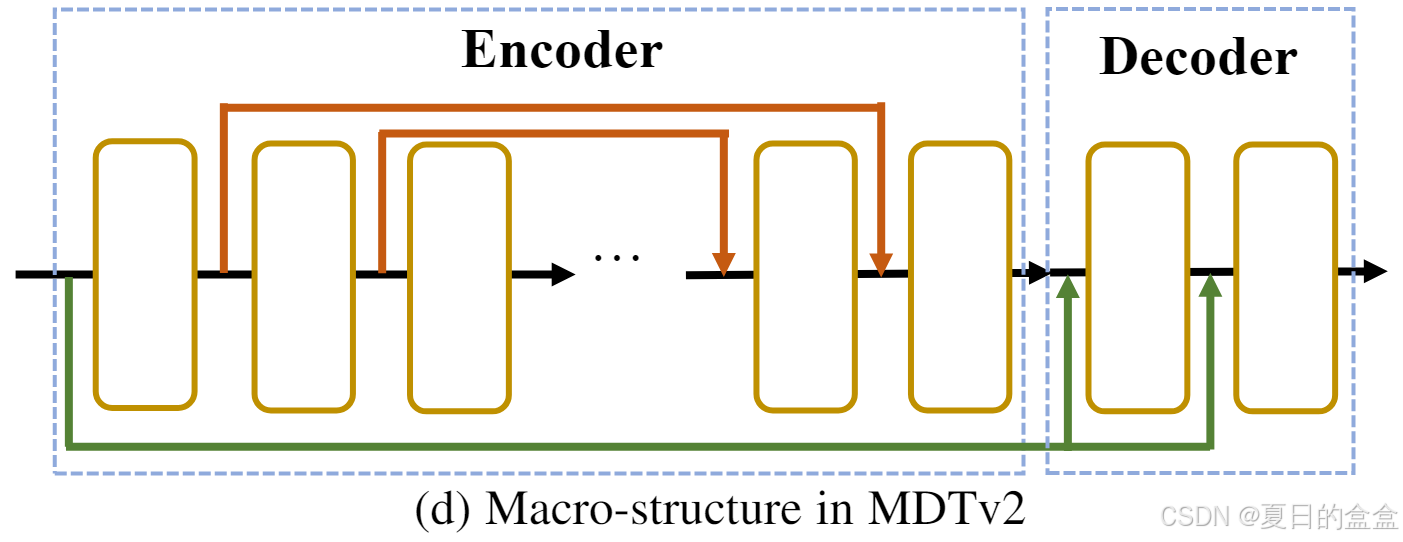
《MDTv2- Masked Diffusion Transformer is a Strong Image Synthesizer》
论文摘要 论文提出了一种名为**Masked Diffusion Transformer (MDT)**的新模型,旨在增强扩散概率模型(DPMs)在图像合成中的上下文推理能力。通过引入掩码潜在建模方案,MDT能够显著提升DPMs在图像中对象部分之间关系的学习能力&am…...

算法 - 二分查找
算法 - 二分查找 今天继续八股文学习,看一下比较常规的几个算法 二分查找是一个基于分治策略的搜索方法,简单的理解就是每次都缩小一轮搜索范围,从中间search一次,直到搜索到结果或者为空为止。 基本思路(设一个有序的…...

Python知识点:如何使用Python进行图像批处理
在Python中进行图像批处理可以使用多种库,如 Pillow、OpenCV 和 imageio。这些库可以用来执行各种图像处理任务,如调整大小、裁剪、旋转、滤镜应用等。以下是使用这些库进行图像批处理的示例。 使用 Pillow 进行图像批处理 Pillow 是一个功能强大的图像…...

数据结构实验1
实验题1:求1到n的连续整数和 题目描述 编写一个程序,对于给定的正整数n,求12…十n,采用逐个累加与(n1)/2(高斯法)两种解法。对于相同的n,给出这两种解法的求和结果和求解时间,并用相关数据进行测试。 运行代码 //实验题1:求1到n的连续整数和 #includ…...

使用Postman+JMeter进行简单的接口测试
以前每次学习接口测试都是百度,查看相关人员的实战经验,没有结合自己公司项目接口真正具体情况。 这里简单分享一下公司项目Web平台的一个查询接口,我会使用2种工具Postman和JMeter如何对同一个接口做调试。 准备工作 首先,登录公…...

基于 SpringBoot 的车辆充电桩管理系统
专业团队,咨询就送开题报告 摘 要 随着信息化时代的到来,管理系统都趋向于智能化、系统化,车辆充电桩管理系统也不例外,但目前国内仍都使用人工管理,市场规模越来越大,同时信息量也越来越庞大,…...
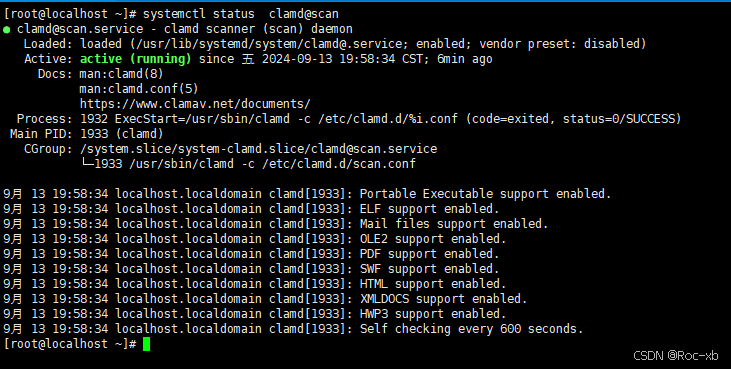
centos7.9安装clamav教程
本章教程主要记录在centos7.9安装clamav过程。 ClamAV(Clam AntiVirus)是一个开源的防病毒软件工具,主要用于检测和消除恶意软件。它最初由 Tomasz Kojm 于 2001 年开发,并由 Cisco Systems 维护和支持。ClamAV 广泛应用于邮件网关、文件服务器和其他需要防病毒保护的环境中…...

产品经理如何转型为AI产品经理,如何理解AI产品工程化
技术领域,特别是人工智能和机器学习,其优秀模型的成功应用是一个复杂过程,它不仅要求技术本身的卓越,还须与现有解决方案竞争,这涉及到技术成熟度、成本有效性、市场接受度等多维度因素。 在这一过程中,产品经理扮演着核心角色,负责协调各方利益,确保技术能够转化为满…...
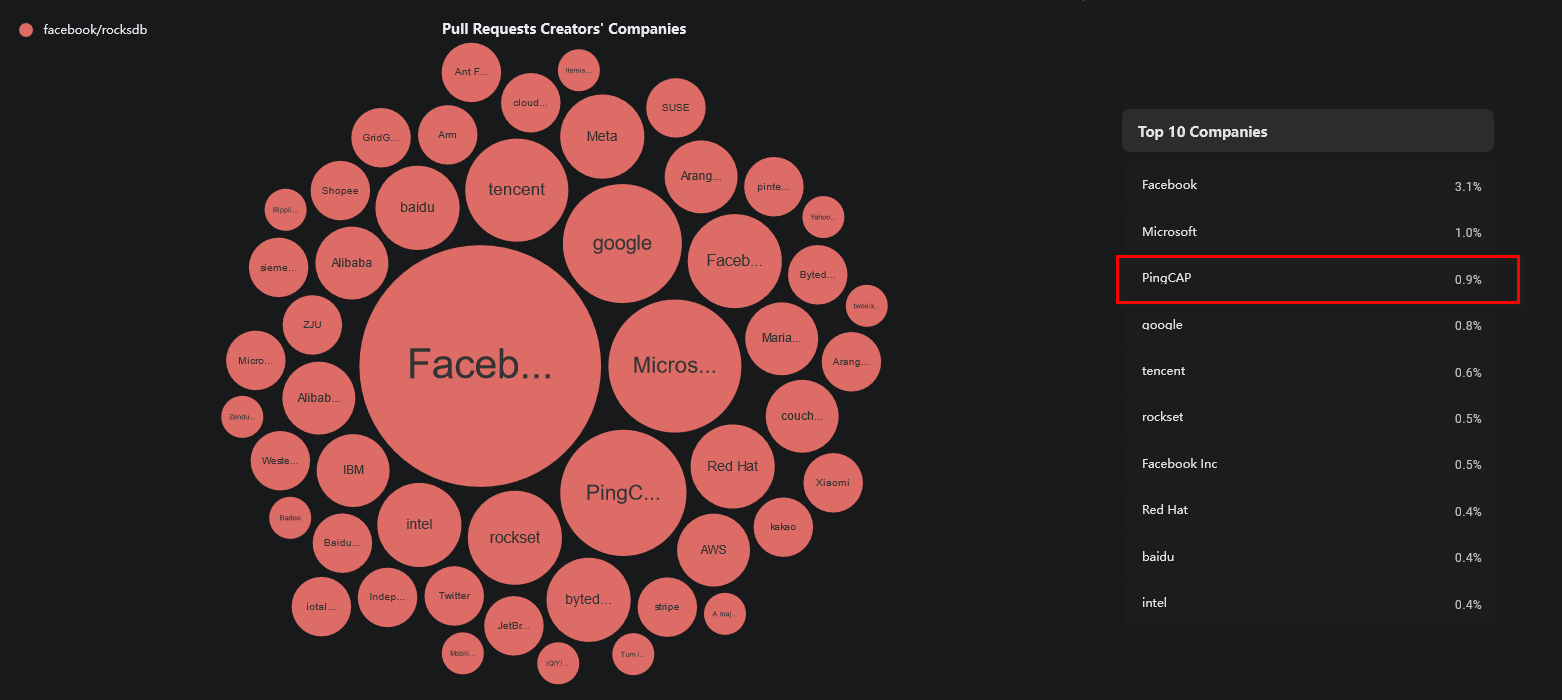
TiDB从0到1学习笔记(精华篇)
历时四个月,恭喜赵老师的《TiDB从0到1》 系列文章顺利完结,小编再次梳理一遍文稿,并附注解分享给大家。 整体架构 从 TiDB 1.0 到 8.0,TiDB 的体系结构一直在不断演进。接下来让我们一起看看整体架构的变化。 TiDB v1 TiDB v1&…...
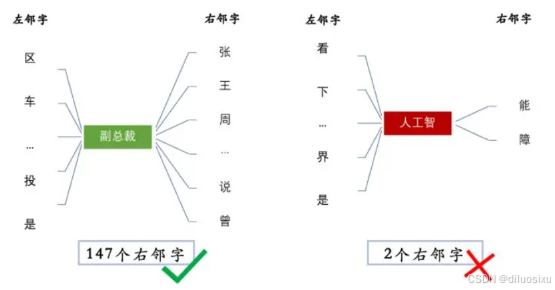
NLP-新词挖掘
一、背景 网络领域的新词发现(挖掘)是一个非常重要的nlp课题。在处理文本对象时,非常关键的问题在于“切词”这个环节,几乎所有的后续结果都依赖第一步的切词。因此切词的准确性在很大程度上影响着后续的处理,切词结果…...
电脑录屏不求人,9月必备免费录屏软件推荐!苹果电脑可用!
在当今这个信息爆炸的时代,电脑录屏软件已经成为了我们日常工作和生活中不可或缺的工具。无论是制作教学视频、录制在线课程、游戏直播,还是创建产品演示,一个好的录屏软件都能帮助我们更高效地完成任务。市场上的录屏软件琳琅满目࿰…...

UEFITool终极指南:轻松解析和编辑UEFI固件的开源利器
UEFITool终极指南:轻松解析和编辑UEFI固件的开源利器 【免费下载链接】UEFITool UEFI firmware image viewer and editor 项目地址: https://gitcode.com/gh_mirrors/ue/UEFITool 你是否曾好奇计算机启动时底层发生了什么?想要深入了解UEFI固件的…...

Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞!
Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞! 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 还在为Windows系统…...

Supabase AI Agent技能库:安全集成数据库操作与边缘函数调用
1. 项目概述:当Supabase遇上AI Agent,一个技能库的诞生最近在捣鼓AI Agent应用开发,发现一个挺有意思的现象:大家都能用LangChain、LlamaIndex这些框架快速搭出个Agent的架子,但真想让这个Agent去干点具体、有用的活儿…...

82.人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案
人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案 一、问题场景:测试环境改了 Prompt,结果生产回答变了 很多大模型项目早期只有一个环境: 一套 Prompt 一个知识库 一个模型地址 一个配置表开发、测试、运营都在同一套配置…...

Claude模型思维链评估框架claweval:原理、实战与高级定制指南
1. 项目概述:一个专为Claude模型设计的“思维链”评估框架最近在AI应用开发圈里,一个名为claweval的项目开始被频繁提及。如果你正在使用Anthropic的Claude系列模型(无论是Claude 3 Opus、Sonnet还是Haiku)来构建需要复杂推理能力…...

MPLAB代码配置器实战:图形化配置PIC/AVR单片机外设,提升开发效率
1. 项目概述:为什么你需要关注MPLAB代码配置器如果你正在使用Microchip的PIC或AVR单片机,并且还在手动编写外设初始化代码、一遍遍翻阅数据手册核对寄存器位,那今天聊的这个工具,可能会让你有种“相见恨晚”的感觉。我说的就是MPL…...

子高斯随机变量与深度学习异常检测原理
1. 子高斯随机变量基础解析子高斯随机变量是概率论中一类具有特殊尾部性质的分布。简单来说,一个随机变量X如果满足存在常数σ>0,使得对于所有λ∈R都有E[exp(λX)] ≤ exp(λσ/2),那么我们就称X是σ-子高斯的。这类分布的关键特征是它们…...

嵌入式开发革命:LuatOS云编译实战指南与效率提升
1. 项目概述:为什么我们需要云编译?作为一名在嵌入式领域摸爬滚打了十多年的老鸟,我太懂那种“买板一时爽,环境火葬场”的痛了。尤其是这几年,合宙、乐鑫、兆易这些厂商的产品线越来越丰富,Air780E、ESP32-…...

555定时器深度解析:从RC电路到三种工作模式的原理与应用
1. 项目概述在电子设计的工具箱里,有那么几颗芯片,你几乎可以在任何时代的电路板上找到它们的身影。它们可能不是性能最强的,但一定是应用最广、最经久不衰的。今天要聊的555定时器,就是这样一个“活化石”级别的存在。自上世纪70…...

基于CircuitPython的巨型机械键盘:从嵌入式开发到定制输入设备实践
1. 项目概述:当机械键盘遇上“巨无霸”如果你和我一样,对机械键盘那清脆的段落感和扎实的敲击感着迷,同时又是个喜欢动手折腾的硬件爱好者,那么这个项目绝对能让你眼前一亮。我们这次要做的,不是常规的60%或87键键盘&a…...