目标检测中的解耦和耦合、anchor-free和anchor-base
解耦和耦合
写在前面
在目标检测中,objectness(或 objectness score)指的是一个评分,用来表示某个预测框(bounding box)中是否包含一个目标物体。
具体来说,YOLO等目标检测算法需要在每个候选区域(anchor box 或 grid cell)上进行多个任务的预测,比如:
- 类别分数:该区域是否属于某个特定类别(例如车、人、狗等)。
- 边界框回归参数:用于调整预测的边界框,使其更加贴合目标物体。
- objectness:表示该预测框中是否包含物体的概率(即,不关心它是什么物体,只关心是否有物体存在)。
YOLO(You Only Look Once)中的“耦合头”和“解耦头”主要与模型的输出层结构以及任务的分离程度有关,尤其是在分类和回归任务上的处理方式。它们的主要区别在于如何处理不同任务(如分类和边界框回归)之间的耦合程度。具体来说:
1. 耦合头(Coupled Head)

在耦合头中,分类和回归任务使用共享的特征图,并通过一个单一的网络层来同时预测类别和边界框。这意味着分类和回归是耦合在一起的,由同一个网络结构同时进行。这种设计通常能够简化模型的结构和计算量,并且在一定程度上能够让分类和回归任务共享特征,可能在简单任务上具有较好的表现。
- 优点:
- 计算效率更高,因为分类和回归任务共享特征和计算资源。
- 网络结构相对简单,参数更少。
- 缺点:
- 分类和回归任务可能相互影响,尤其是在处理复杂目标时,分类和回归的精度可能受到影响。
2. 解耦头(Decoupled Head)

在解耦头中,分类和回归任务被分离为两个不同的分支。通常,会有两个独立的网络分支来分别处理分类和回归任务。每个任务有自己专门的特征提取和预测层,这种设计可以减少分类和回归之间的相互影响,从而在任务上达到更高的精度,尤其是在处理复杂场景时。
- 优点:
- 分类和回归的任务相对独立,减少相互干扰。
- 通常可以提高分类和边界框预测的精度,尤其是对于更复杂的目标检测任务。
- 缺点:
- 由于需要两个独立的分支,计算量和参数量增加。
- 计算效率比耦合头低。
总结
- 耦合头适合轻量化模型和计算资源有限的情况,追求更高的效率。
- 解耦头适合更复杂的目标检测任务,追求更高的精度。
anchor-free和anchor-base
Anchor-free 是一种目标检测方法,区别于传统的 Anchor-based 检测方法。Anchor-free 方法不依赖于预设的 Anchor box,而是直接预测目标物体的关键点或中心点来生成边界框。这种方法近年来在目标检测中变得越来越流行,尤其是在 YOLOv4, CenterNet, FCOS 等模型中都有应用。
Anchor-based 方法
在传统的 Anchor-based 方法中,目标检测器会在图像的每个位置放置多个预定义的 Anchor boxes。这些 Anchor boxes 是一组具有不同大小、纵横比的候选框,用于检测不同尺寸的物体。模型通过回归预测来调整这些 Anchor boxes,以拟合目标物体。
缺点:
- 需要设计和设置 Anchor box 的尺寸、比例,这通常需要根据数据集进行大量的调参。
- Anchor boxes 数量多,计算成本高。
- 小物体或大物体可能无法很好地与预定义的 Anchor 匹配,导致检测精度下降。
Anchor-free 方法
Anchor-free 方法的关键思想是摆脱对预定义的 Anchor boxes 的依赖,而是直接从图像的像素、特征图上推断目标的位置和大小。主要有以下几种常见策略:
- 关键点检测:通过检测物体的关键点或中心点,然后利用这些关键点回归出边界框的参数。例如,CenterNet 就是基于物体的中心点进行检测。
关键点检测 是 Anchor-free 目标检测的一种实现方式,具体通过检测物体的某些关键点(如中心点或角点),从而确定物体的位置和边界框。这与传统的 Anchor-based 方法有显著区别,因为它不依赖预先定义的 Anchor box,而是直接在特征图上推断出物体的几何信息。
让我们逐步解析它的工作原理,尤其是以 CenterNet 为例:
1. 关键点检测的核心思想
传统的 Anchor-based 方法是通过大量的预设框(Anchor box)去拟合物体位置,而关键点检测方法直接通过检测物体的关键点,比如:
- 中心点(CenterNet):直接预测物体的中心点。
- 角点(CornerNet):预测物体的左上角和右下角。
物体的这些关键点是目标检测的核心,用来确定物体的位置和边界框。
2. 以 CenterNet 为例:基于中心点的检测
在 CenterNet 中,检测器会学习每个物体的 中心点。具体步骤如下:
- 中心点的检测:CenterNet 的输入是图片,它通过卷积神经网络(CNN)生成一个特征图。对于每个物体,网络会预测一个特征点,表示物体的中心点。这个中心点用于回归物体的位置和大小。
- 边界框的回归:一旦确定了物体的中心点,网络还会预测该中心点到物体的边界的距离。这些距离可以直接用来构造物体的边界框(bounding box)。
- 具体来说,对于每个中心点,网络会输出该点到边界框四个边界的距离值(即左、右、上、下距离)。
- 这些距离可以用来计算边界框的大小,从而直接得到物体的完整位置。
3. 关键点检测的优势
- 不需要 Anchor box:相比于传统的 Anchor-based 方法,关键点检测完全不依赖预定义的 Anchor box,这避免了 Anchor box 尺寸和比例设置的不匹配问题。对于不同大小、形状的物体,关键点检测更加灵活。
- 减少了计算复杂度:传统 Anchor-based 方法通常需要生成大量的 Anchor boxes,这会带来计算的额外开销。而关键点检测只需要检测图像中的少数几个关键点,大大减少了冗余的候选框数量。
- 更好的小物体检测:由于关键点检测方法不依赖特定尺寸的框,它在检测非常小的物体时有优势,不需要通过 Anchor box 来匹配大小。
4. 具体例子:CenterNet 如何工作
- 输入:一张图片。
- 特征提取:通过卷积神经网络(如 ResNet 或 Hourglass)提取高维特征。
- 中心点预测:在特征图上,每个像素都会预测是否为物体的中心点,这个任务可以看作是一个分类问题,输出是一个热图(heatmap),每个像素的值表示它是物体中心的概率。
- 回归边界框:对于每个预测到的中心点,回归出到物体边界的四个距离(即边框的 left、right、top、bottom)。
- 生成边界框:根据回归的距离值生成最终的边界框。
5. 关键点检测的常见模型
- CenterNet:通过检测物体的中心点,并回归边界框的尺寸。
- CornerNet:通过检测物体的角点(左上角和右下角),然后将这些角点连接生成边界框。
- 边界框中心点回归:模型直接预测每个像素点相对于目标物体边界的偏移量和尺寸。这是像 FCOS(Fully Convolutional One-Stage Object Detection)这类方法的核心思想。
FCOS 的工作原理
1. 特征提取
- 输入图像:首先,FCOS 接收一张输入图像。
- 特征图生成:通过一个卷积神经网络(CNN),如 ResNet 或 VGG,提取图像的高维特征,并生成一个特征图。
2. 像素级别的回归
- 每个像素点的预测:FCOS 不依赖预定义的 Anchor boxes,而是对特征图上的每个像素进行回归,预测该像素点到目标边界框的四个边界的距离(即左、右、上、下的距离)。
- 左边界:每个像素点预测到目标的左边界的距离。
- 右边界:每个像素点预测到目标的右边界的距离。
- 上边界:每个像素点预测到目标的上边界的距离。
- 下边界:每个像素点预测到目标的下边界的距离。
- 目标中心点:除了预测边界框的四个边界距离外,FCOS 还会预测该像素点是否是目标的中心点。对于每个像素点,FCOS 生成一个热图(heatmap),表示该像素点是否为目标中心点的概率。这个热图帮助模型判断目标的存在位置。
3. 生成边界框
- 从回归值计算边界框:根据每个像素点预测的距离值,FCOS 可以直接计算目标物体的边界框。具体步骤如下:
- 左边界:通过预测的距离值从像素点向左推算得到目标的左边界。
- 右边界:通过预测的距离值从像素点向右推算得到目标的右边界。
- 上边界:通过预测的距离值从像素点向上推算得到目标的上边界。
- 下边界:通过预测的距离值从像素点向下推算得到目标的下边界。
4. 后处理
- 去除背景和重叠:FCOS 生成的边界框通过非极大值抑制(NMS)去除冗余的框,确保最终的检测结果准确且唯一。
FCOS 的优点
- 不需要 Anchor boxes:FCOS 不依赖于 Anchor boxes,简化了模型的设计和训练过程。无需预定义和调节 Anchor box 的尺寸和比例。
- 更高效的计算:由于不需要生成大量的 Anchor boxes,FCOS 在计算上更加高效,减少了冗余计算。
- 处理不同尺度的物体:通过回归每个像素点的边界框,FCOS 更加灵活地处理各种尺寸的物体,适应性强。
Anchor-free 方法的优点
- 无需设计 Anchor boxes:省去了手动设计和调参的工作,简化了模型的设置流程。
- 更高的计算效率:由于不需要生成大量的 Anchor boxes,减少了计算开销。
- 更自然的目标表示:直接回归关键点、中心点或边界框参数,使得模型更贴近图像本身的几何特性,特别是在处理不同尺寸的物体时,表现得更好。
典型的 Anchor-free 模型
- CenterNet:通过回归目标物体的中心点,然后预测宽高,从而生成边界框。
- FCOS:使用每个像素点相对于目标的距离(即边界框的四个边界到当前像素点的距离)来直接回归边界框。
- CornerNet:通过回归目标物体的左上角和右下角来确定边界框。
Anchor-based vs Anchor-free
- Anchor-based 方法:通过预定义的 Anchor boxes 提供了目标物体的粗略位置和大小,然后通过回归优化这些候选框。
- Anchor-free 方法:直接预测物体的特征(如中心点、边界)来回归边界框,不依赖预定义的框。
相关文章:
目标检测中的解耦和耦合、anchor-free和anchor-base
解耦和耦合 写在前面 在目标检测中,objectness(或 objectness score)指的是一个评分,用来表示某个预测框(bounding box)中是否包含一个目标物体。 具体来说,YOLO等目标检测算法需要在每个候选区…...

git rev-parse
git rev-parse 是 Git 中一个非常有用的命令,用于解析并返回与 Git 对象(如提交、分支、标签等)相关的信息。它可以帮助我们从给定的引用(ref)中解析出 SHA-1 哈希值、路径信息等。这个命令在编写 Git 脚本时尤其有用&…...

【Unity】在Unity 3D中使用Spine开发2D动画
文章目录 内容概括前言下载安装 Spine Pro导入Unity插件Spine动画导入Unity使用展现动画效果展现 内容概括 本文主要讲解 Spine Pro 免(破)费(解)版的安装,以及如何将动画导入到Unity中使用。 前言 通常要用 Spine …...

考试:软件工程(01)
软件开发生命周期 ◆软件定义时期:包括可行性研究和详细需求分析过程,任务是确定软件开发工程必须完成的总目标, 具体可分成问题定义、可行性研究、需求分析等。 ◆软件开发时期:就是软件的设计与实现,可分成概要设计…...
——赫夫曼编码)
数据结构应用实例(三)——赫夫曼编码
Content: 一、问题描述二、算法思想三、代码实现四、小结 一、问题描述 对一篇英文文章,统计各字符(仅限于26个小写字母)出现的次数,并据此进行 Huffman 编码。 二、算法思想 首先,打开文本文件࿰…...

关于Spring Cloud Gateway中 Filters的理解
Spring Cloud Gateway中 Filters的理解 Filters Filters拦截器的作用是,对请求进行处理 可以进行流量染色 ⭐增加请求头 例子 spring:cloud:gateway:routes:- id: add_request_header_routeuri: http://localhost:8123predicates:- Path/api/**filters:- AddR…...

【实践】应用访问Redis突然超时怎么处理?
目录标题 问题描述分析过程查看监控数据系统监控指标JVM监控指标Redis监控指标分析应用异常单机异常规律集群异常规律统计超时的key 初步结论验证结论访问Redis链路slowlogRedis单节点info all定位redis节点定位异常keybigkeystcpdump定位大key影响 经验总结 问题描述 某产品线…...

Spring Cloud Alibaba核心组件Nacos/Seata/Sentinel
文章目录 Spring Cloud Alibaba介绍Spring Cloud 微服务体系Spring Cloud Alibaba 定位 注册配置中心--Nacos服务治理架构注册中心原理 Nacos介绍Nacos 的关键特性1.服务注册和发现2.动态配置服务3.实时健康监控4.动态DNS服务5.易于集成: Nacos入门示例服务注册与发…...
Ubuntu搭建FTP服务器
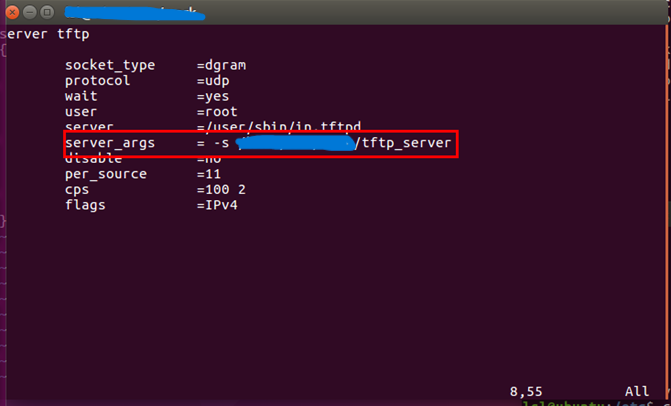
1. 首先,我们需要安装和配置xinetd,安装的具体命令如下: sudo apt-get install xinetd 2. 新建tftp工作目录,并添加读、写、执行权限(没有权限后面无法正常访问该文件夹),如下图所示。 3. 安装…...

Redis在单线程下删除大Key会发生什么?怎么删除大Key?
大Key的定义 大Key是指在缓存系统(如Redis)或分布式存储中,单个键(Key)对应的数据量非常大,通常存储的是大块数据结构,例如包含大量数据的哈希表、列表、集合或有序集合。这种大Key往往会对系统…...

《Exploit temporal cues in multi-camera 3D object detection》论文泛读
ReadPaperhttps://readpaper.com/pdf-annotate/note?pdfId4666749915775385601eId2491528568128599808 针对单帧数据含有的信息太少的问题,提出了一种新的方法,BEVDet4D,这种方法可以访问时间线索,并且取得了较好的表现ÿ…...

十四、centos7 yum报错:cannot find a valid baseurl for repo:base/7/x86_64的解决方案
🌻🌻目录🌻🌻 一、 centos7 yum报错:cannot find a valid baseurl for repo:base/7/x86_64二、分析错误三、解决方案3.1 检查网络连接3.2 检查DNS设置3.3 检查YUM仓库配置3.3.1 使用官方CentOS镜像配置3.3.2 使用阿里云…...

qt使用对数坐标的例子,qchart用QLogValueAxis坐标不出图解决
硬件:ThinkPad T15 系统:win10 专业版 qt版本:Qt 5.14.1 , QtCreator 4.11.1 软件界面放了一个QPushButton,一个QVBoxLayout,如下: 主要代码如下,我添加了两条曲线,…...

Python 爬虫入门 - 爬虫 requests 请求
在当今互联网时代,数据的获取变得尤为重要,而网络爬虫作为自动化获取数据的一种方式,受到了越来越多编程爱好者和数据分析人员的青睐。Python 语言以其简洁的语法和丰富的库,成为了实现网络爬虫的首选工具。其中,requests库是一个非常流行且强大的工具,用于发送 HTTP 请求…...
 的详解)
flink中startNewChain() 的详解
在 Apache Flink 中,startNewChain() 是一个与算子链(operator chaining)相关的方法。与 disableChaining() 类似,它允许开发者控制算子链的创建方式,但 startNewChain() 的作用是从当前算子开始创建一个新的算子链&am…...

uniapp 苹果安全域适配
一、使用原生占位(仅App端支持) //在manifest.json 文件中 app-plus 中配置 "safearea": { "background": "#FFFFFF", "bottom": { "offset": "auto" } } 二、不使用原生占位 //&…...

linux使用命令行编译qt.cpp
步骤: mkdir qttestcd qttestvim hello.cpp #include <QApplication> #include <QDialog> #include <QLabel> int main(int argc,char* argv[]) {QApplication a(argc,argv);QLabel label("aaa");label.resize(100,100);label.show()…...

Ubuntu 22.04 LTS 上安装 Docker
单台机器安装docker环境,是为了后面安装open-webui,环境安装比较简单,没有难点,但一定要按步骤走,否则还是会遇到一些问题的。 第 1 步:更新软件包并安装必要软件 运行以下命令,更新软件包索引…...

2024秋季云曦开学考
web ezezssrf 打开环境,代码审计 看起来有点多,要绕过五层 第一层:存在弱比较,使用数组或0e绕过 yunxi[]1&wlgf[]2 yunxis878926199a&wlgfs155964671a 第二层:存在强比较,此处使用string限制…...

基于STM32与Qt的自动平衡机器人:从控制到人机交互的的详细设计流程
一、项目概述 目标和用途 本项目旨在开发一款基于 STM32 控制的自动平衡机器人,结合步进电机和陀螺仪传感器,实现对平衡机器人的精确控制。该机器人可以用于教育、科研、娱乐等多个领域,帮助用户了解自动控制、机器人运动学等相关知识。 技…...

机械臂时间冲击最优轨迹规划【附代码】
✨ 长期致力于串联机械臂、时间-冲击最优、轨迹规划、多目标粒子群算法、非支配排序遗传算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)构建基于…...
)
藏文语音生成准确率从61.2%跃升至94.8%:ElevenLabs Fine-tuning私有数据集构建全流程(含217小时母语者录音标注规范)
更多请点击: https://intelliparadigm.com 第一章:藏文语音生成技术演进与ElevenLabs适配挑战 藏文作为具有复杂音节结构、声调隐含性及丰富上下文依赖的黏着语系文字,其语音合成长期受限于高质量标注语料稀缺、音素-音节映射不唯一、以及缺…...

GitHub宝藏项目:生成式AI公司全景导航图与实战应用指南
1. 项目概述:一份AI创业公司的全景导航图最近在GitHub上闲逛,发现了一个宝藏仓库,名字叫“awesome-generative-ai-companies”。这个项目,说白了,就是一个由社区驱动的、持续更新的生成式AI公司名录。它不像那些商业咨…...

基于五年一线体验,青岛二胎家庭收纳系统的真相
一、行业痛点分析在收纳领域,二胎家庭面临着诸多核心技术挑战。数据表明,超过70%的二胎家庭在装修时未充分考虑未来的收纳需求,导致入住后空间拥挤、物品杂乱无章。青岛三木空间设计在五年的一线服务中发现,很多二胎家庭存在以下问…...

基于LLM与RAG构建智能问答系统:架构、实现与优化指南
1. 项目概述:当RAG遇上LLM,构建你的智能知识问答引擎最近在GitHub上看到一个挺有意思的项目,叫“Jenqyang/LLM-Powered-RAG-System”。光看名字,圈内人大概就能猜到个七七八八:这是一个基于大语言模型(LLM&…...
)
py每日spider案例之某website之xin东方选课搜索接口(难度一般 扣取代码即可)
加密位置: 逆向接口参数: 逆向接口: const g = globalThis; g.window = g; g.self = g; g.location = {<...

测试驱动开发与持续集成实践指南
测试驱动开发与持续集成实践指南 引言 测试驱动开发(TDD)和持续集成(CI)是现代软件开发中的重要实践。TDD强调先写测试再实现功能,CI确保代码的持续质量和快速反馈。本文将深入探讨TDD的方法论和CI的实践经验。 一、测…...

5分钟掌握Diablo Edit2:暗黑破坏神II角色编辑器的终极指南
5分钟掌握Diablo Edit2:暗黑破坏神II角色编辑器的终极指南 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 还在为暗黑破坏神II的刷装备烦恼吗?想要快速体验不同build的乐趣…...

从零搭建ROS2与Web实时数据交互系统
1. 为什么需要ROS2与Web实时交互? 在机器人开发或IoT项目中,我们经常需要通过网页远程监控设备状态或发送控制指令。想象一下这样的场景:你正在调试一个自动巡逻的机器人,但总不能一直盯着终端看日志吧?这时候如果有个…...
)
ORB-SLAM3地图保存新思路:手把手教你将.osa地图转成PCD点云(附完整代码)
ORB-SLAM3地图数据解放指南:从封闭格式到通用点云的全链路实践 当你在昏暗的实验室调试ORB-SLAM3运行整夜后,终于得到那个珍贵的.osa地图文件时,却发现无法用熟悉的点云工具打开分析——这种挫败感或许正是促使你阅读本文的原因。作为三维视觉…...