数据稀缺条件下的时间序列微分:符号回归(Symbolic Regression)方法介绍与Python示例
时间序列概况在日常生活和专业研究中都很常见。简而言之,时间序列概况是一系列连续的数据点 y(0), y(1), …, y(t) ,其中时间 t 的点依赖于时间 t-1 的前一个点(或更早的时间点)。
在许多应用中,研究者致力于预测时间序列概况的未来行为。存在各种建模方法。这些模型通常基于过去或现在的信息,对未来概况进行估计。相关研究涉及多个领域,如使用神经网络进行天气预报(Bi et al., 2023)、深度学习在股票价格预测中的应用(Xiao and Su, 2022)以及制药产品需求演变分析(Rathipriya et al., 2023)等。
然而,模型训练需要数据支持。通常,数据质量越高,对研究过程的描述就越准确。
一般而言,模型可以学习预测下一个状态 y(t+1) ,如果给定先前的时间点 y(0), …, y(t) 。但在某些应用中,我们可能需要模型接收当前观察值 y(0), …, y(t) ,并预测系统在当前或下一个时间点的变化速率。这就要求我们获得系统的导数 dy ,而非可观察状态 y 。所以要训练此类模型并输出导数 dy ,首先需要收集这些导数数据,这些导数是直接从观察数据 y 计算得出的,因为直接测量导数在很多情况下可能困难或不可行。
这就引出了一个关键问题:噪声。处理过噪声时间序列数据的研究者都知道计算其导数的困难。
有多种方法可以处理时间序列数据中的噪声。本文将介绍一种在我们的研究项目中表现良好的方法,特别适用于时间序列概况中数据点较少的情况。

让我们开始使用Python来实现这个方法。
数据生成
首先,我们需要创建一个测试场景,并且希望模拟数据点较少的情况,我们将构建一个简单的生物反应器模型。
在这个反应器中,生物质(如细菌或其他细胞)消耗底物(如糖),并产生一种产品,例如具有药用价值的蛋白质。我们关注"生物质"、"底物"和"产品"这三个变量。这些物质的浓度(以克/升(g/L)为单位)在给定时间点 t 可直接测量,构成了我们的可观察数据 y 。
我们的目标是创建一个能够输出导数的特定形式的模型。需要从观察到的时间序列概况 y 中推导出导数。
让我们使用Python来实现这个过程。首先导入必要的包,并定义一个用于保存图形的函数:
importos importrandom random.seed(0) importnumpyasnp importmatplotlib.pyplotasplt fromscipy.integrateimportodeint fromsklearn.metricsimportmean_squared_error # 保存图形的函数 FIG_SIZE= (7, 2.5) FIG_DPI=400 FIG_SAVEPATH='.' FIG_SAVEEXT= ['png'] defsave_figure(figure_savepath : str=None, save_figures_extension : list= ['png'], figure_name : str='Figure', dpi : int=1200): figure_name=figure_name ifisinstance(save_figures_extension, list): figure_extension_list=save_figures_extension else: raiseValueError('[-] The indicated file extension for figures needs to be a list!') forfigure_extensioninfigure_extension_list: iffigure_savepathisNone: figure_savepath=os.getcwd() savepath=os.path.join(figure_savepath, figure_name+'.'+figure_extension) plt.savefig(savepath, dpi=dpi) print(f'[!] Figure saved as: {savepath}')
接下来,定义一个类来模拟上述生物反应器场景。这个类将使用给定的初始条件 y0 和80小时的时间跨度( tspan )求解一个常微分方程(ODE)系统,使用20个时间点。这种设置模拟了每四小时采样一次的低频采样情况。
#%% 生成时间序列数据 # ============================================================================ classdatagen(): # ------------------------------------------------------------------------ def__init__(self, y0=np.array([0.1, 60, 0]), tspan=np.linspace(0, 80, 20)): self.y0=y0 self.tspan=tspan self.specnames= ['Biomass', 'Substrate', 'Product'] # ------------------------------------------------------------------------ defsolve_ODE_model(self): '''求解给定样本和时间跨度的ODE模型。 \ 返回导数(dydt)作为形状为[n,]的数组和ODE求解器的运行时间。 ''' # 模拟反应器操作直到选定的时间tf self.y=odeint(func=self.ODEmodel, y0=self.y0, t=self.tspan) # ------------------------------------------------------------------------ defODEmodel(self, y, t): '''调整后的批次发酵ODE模型。''' # 变量 X=y[0] S=y[1] P=y[2] # 参数 mu_max=0.25; #h^-1 K_S=105.4; #kg/m^3 Y_XS=0.07; #[-] Y_PS=0.167; #[-] KXmu=121.8669;#g/L 高细胞密度导致的生物量生长抑制常数 T=273+35; #K R=0.0083145; #kJ/(K*mol) 通用气体常数 k1_=130.0307; #[-] 生物量生长激活常数 E1_=12.4321; #kJ/mol 生物量生长激活焓 k2_=3.8343e48; #[-] 生物量生长失活常数 E2_=298.5476; #kJ/mol 生物量生长失活焓 # 定义速率常数的温度依赖性 k1=k1_*np.exp(-E1_/(R*T)) k2=k2_*np.exp(-E2_/(R*T)) # 计算生物量的比生长速率 mu= (mu_max*S)/(K_S+S) *k1/(1+k2) * (1-(X/(KXmu+X))) # 计算底物消耗 sigma=-(1/Y_XS)*mu # 计算蛋白质的比生产速率 pi=Y_PS/Y_XS*mu # 速率矢量化 rate=np.hstack((mu.reshape(-1,1), sigma.reshape(-1,1), pi.reshape(-1,1))) # 生物量、体积和产品的ODE dydt=rate*X.reshape(-1,1) # 返回 returndydt.reshape(-1,) # ------------------------------------------------------------------------ defaddnoise_per_species(self, percentage=5): '''使用一些基准数据并添加噪声。 ''' self.y_noisy=np.zeros((self.y.shape[0], 0)) forspec_idinrange(self.y.shape[1]): rmse=mean_squared_error(self.y[:, spec_id], np.zeros(self.y[:, spec_id].shape), squared=False) y_noisy_spec=self.y[:, spec_id] +np.random.normal(0, rmse/100.0*percentage, self.y[:, spec_id].shape) self.y_noisy=np.hstack((self.y_noisy, y_noisy_spec.reshape(-1,1))) # ---------------------------------------- defevaluate_true_derivatives(self): '''评估生成数据的真实导数。 ''' self.y_true_diff=np.zeros((0, self.y.shape[1])) fort_id, tinenumerate(self.tspan): self.y_true_diff=np.vstack((self.y_true_diff, self.ODEmodel(y=self.y[t_id, :], t=t).reshape(1,-1)))
有了这个类,我们可以实例化它,通过求解ODE系统生成数据,并添加噪声。以下代码展示了如何生成数据并可视化结果:
# 实例化类 data=datagen() # 创建数据并添加噪声 data.solve_ODE_model() data.addnoise_per_species() data.evaluate_true_derivatives() # 绘制真实和噪声数据 fig, ax=plt.subplots(figsize=FIG_SIZE, ncols=3) foriinrange(len(data.specnames)): ax[i].plot(data.tspan, data.y[:, i], marker='', linestyle='--', color='black', label='Ground truth') ax[i].plot(data.tspan, data.y_noisy[:, i], marker='o', markersize=4, linestyle='', color='black', alpha=0.6, label='Observed') ax[i].set_xlabel('Time / h', fontsize=8) ax[i].set_ylabel('{} / g/L'.format(data.specnames[i]), fontsize=8) ax[i].tick_params(axis='both', which='major', labelsize=8) ifi==1: ax[i].legend(frameon=False, fontsize=8, loc='lower left') plt.tight_layout() save_figure(figure_savepath=FIG_SAVEPATH, save_figures_extension=FIG_SAVEEXT, figure_name='True_and_noisy_data', dpi=FIG_DPI)

图1. 研究系统的基准真实情况(虚线)与观察到的噪声数据点(黑色圆圈)。
图1展示了生成的数据。虚线表示无噪声的真实数据,而黑点表示添加噪声后的观察数据。从左到右的三个图分别显示了生物质增长、底物消耗和产品形成的过程。
接下来,我们将探讨几种不同的方法来计算这些噪声数据的导数,并比较它们的性能。
有限差分法的直接应用
首先,我们将直接对噪声数据应用有限差分(FD)法。这是一种计算函数导数的基本方法,定义如下:

其中 f’(x) 是函数 f(x) 在点 x 处的导数, h 是一个小步长。
以下是有限差分法的Python实现:
deffinite_difference(x_data, y_data): x_diff=np.zeros((y_data.shape[0]-1, y_data.shape[1])) y_diff=np.zeros((y_data.shape[0]-1, y_data.shape[1])) dt= (x_data[1] -x_data[0])/2 forspec_idinrange(y_data.shape[1]): y_diff_FD= [] x_diff_FD= [] fort_inrange(len(x_data)-1): x_diff_FD.append(x_data[t_] +dt) y_diff_FD.append((y_data[t_+1, spec_id] -y_data[t_, spec_id])/(x_data[t_+1] -x_data[t_])) x_diff[:, spec_id] =np.array(x_diff_FD) y_diff[:, spec_id] =np.array(y_diff_FD) returnx_diff[:,0].reshape(-1,), y_diff # 执行有限差分 data.x_diff_FD, data.y_diff_FD=finite_difference(data.tspan, data.y_noisy)
让我们比较FD法计算的导数与真实导数:
fig, ax=plt.subplots(figsize=FIG_SIZE, ncols=3) foriinrange(len(data.specnames)): ax[i].plot(data.tspan, data.y_true_diff[:, i], marker='', linestyle='--', color='black', label='True') ax[i].plot(data.x_diff_FD, data.y_diff_FD[:, i], marker='', markersize=4, linestyle='-', color='blue', label='FD') ax[i].set_xlabel('Time / h', fontsize=8) ax[i].set_ylabel('Derivative {} / g/L/h'.format(data.specnames[i]), fontsize=8) ax[i].tick_params(axis='both', which='major', labelsize=8) ifi==1: ax[i].legend(frameon=False, fontsize=8, loc='upper center') plt.tight_layout() save_figure(figure_savepath=FIG_SAVEPATH, save_figures_extension=FIG_SAVEEXT, figure_name='Derivative_comparison_FD', dpi=FIG_DPI)

图2. 基准真实导数(虚线)与通过FD计算的导数(蓝色实线)对比。
图2展示了FD法的局限性。黑色虚线表示真实导数,蓝色实线表示FD法计算的导数。可以观察到,FD法对噪声极为敏感。这种敏感性导致了导数的显著波动,使得计算结果难以应用于后续分析或建模。
Savitzky-Golay滤波技术
为了减少噪声影响,一种常用方法是在计算导数之前先对数据进行滤波。Savitzky-Golay(SG)滤波器是一种广泛使用的数据平滑技术。SG滤波器通过在移动窗口内拟合多项式来平滑数据。可以使用
scipy
包中的SG滤波器实现:
fromscipy.signalimportsavgol_filter # 定义SG滤波器参数 window_size=5 polynomial_order=2 # 对每个物种的噪声数据进行平滑 y_smooth=np.zeros((data.y_noisy.shape[0], data.y_noisy.shape[1])) foriinrange(data.y_noisy.shape[1]): y_smooth[:, i] =savgol_filter(data.y_noisy[:, i], window_size, polynomial_order) # 绘制平滑数据与噪声数据的对比 fig, ax=plt.subplots(figsize=FIG_SIZE, ncols=3) foriinrange(len(data.specnames)): ax[i].plot(data.tspan, data.y[:, i], marker='', linestyle='--', color='black', label='True') ax[i].plot(data.tspan, data.y_noisy[:, i], marker='o', markersize=4, linestyle='', color='black', label='Observed') ax[i].plot(data.tspan, y_smooth[:, i], marker='', linestyle='-', color='red', label='Smoothed') ax[i].set_xlabel('Time / h', fontsize=8) ax[i].set_ylabel('{} / g/L'.format(data.specnames[i]), fontsize=8) ax[i].tick_params(axis='both', which='major', labelsize=8) ifi==1: ax[i].legend(frameon=False, fontsize=8, loc='lower left') plt.tight_layout() save_figure(figure_savepath=FIG_SAVEPATH, save_figures_extension=FIG_SAVEEXT, figure_name='Smoothing_SG', dpi=FIG_DPI)

图3. 基准真实数据(黑色虚线)与观察到的噪声数据点(黑色圆圈)和SG平滑后的概况(红色实线)对比。
使用平滑后的数据点重新计算导数:
# 对Savitzky-Golay平滑后的数据使用FD法计算导数 data.x_diff_SGFD, data.y_diff_SGFD=finite_difference(data.tspan, y_smooth)
比较SG-FD方法与之前的结果:
# 可视化真实导数、FD和SGFD的结果 fig, ax=plt.subplots(figsize=FIG_SIZE, ncols=3) foriinrange(len(data.specnames)): ax[i].plot(data.tspan, data.y_true_diff[:, i], 'k--', label='True') ax[i].plot(data.x_diff_FD, data.y_diff_FD[:, i], 'b-', label='FD') ax[i].plot(data.x_diff_SGFD, data.y_diff_SGFD[:, i], 'r-', label='SGFD') ax[i].set_xlabel('Time / h', fontsize=8) ax[i].set_ylabel('Derivative {} / g/L/h'.format(data.specnames[i]), fontsize=8) ax[i].tick_params(axis='both', which='major', labelsize=8) ifi==1: ax[i].legend(frameon=False, fontsize=8, loc='best') plt.tight_layout() save_figure(figure_savepath=FIG_SAVEPATH, save_figures_extension=FIG_SAVEEXT, figure_name='Derivative_comparison_FD_SGFD', dpi=FIG_DPI)

图4. 基准真实导数(黑色虚线)与通过FD计算的导数(蓝色实线)和SG平滑后用FD计算的数据(红色实线)对比。
图4显示,SG-FD方法(红线)相比直接FD方法(蓝线)有所改善。但是结果仍然存在明显的噪声影响,特别是在数据变化较快的区域。这表明在数据点较少的情况下,SG滤波器的效果可能不够理想。
符号回归方法
现在介绍一种不太常用但在某些情况下非常有效的方法:符号回归(SR)。SR方法的核心思想是找到一个能够很好拟合数据的函数表达式。一旦我们有了这个函数表达式,就可以对其进行解析微分,从而获得更平滑的导数估计。
SR方法的优势在于它可以自动发现数据中的潜在模式和关系,而不需要预先指定函数形式。这对于复杂的非线性系统特别有用。
我们将使用
udiff
包来实现SR方法。这个包基于Guimerà等人(2020)开发的BMS算法。以下是使用SR方法的代码:
from udiff.smooth import smooth_bms # 使用符号回归模型平滑数据
from udiff.differentiate import differentiator # 对获得的符号回归模型进行解析微分 # 创建空数组用于存储拟合概况
data.y_smooth_sr = np.zeros(data.y.shape)
data.y_diff_sr = np.zeros(data.y.shape) # 对每个物种拟合概况并求导(这个过程可能需要一些时间)
for spec_id in range(data.y.shape[1]): X = data.tspan Y = data.y_noisy[:, spec_id] obj = smooth_bms(x=X, y=Y, scaling=False) obj.fit_bms(nsteps=1e4, maxtime=1800, minr2=0.999, show_update=True, update_every_n_seconds=200) data.y_smooth_sr[:, spec_id] = obj.y_smooth diffobj = differentiator(obj) diffobj.differentiate() data.y_diff_sr[:, spec_id] = diffobj.y_diff
这个过程可能需要一些时间,因为SR算法需要搜索和评估大量可能的函数表达式。完成后,我们可以比较SR方法与之前的方法:
# 可视化真实导数、FD、SGFD和SR的结果
fig, ax = plt.subplots(figsize=FIG_SIZE, ncols=3)
nm = data.specnames
for i in range(len(data.specnames)): ax[i].plot(data.tspan, data.y_true_diff[:, i], 'k--', label='True') ax[i].plot(data.x_diff_FD, data.y_diff_FD[:, i], 'b-', label='FD') ax[i].plot(data.x_diff_SGFD, data.y_diff_SGFD[:, i], 'r-', label='SGFD') ax[i].plot(data.tspan, data.y_diff_sr[:, i], 'g-', label='SR') ax[i].set_xlabel('Time / h', fontsize=8) ax[i].set_ylabel('Derivative {} / g/L/h'.format(data.specnames[i]), fontsize=8) ax[i].tick_params(axis='both', which='major', labelsize=8) if i == 1: ax[i].legend(frameon=False, fontsize=8, loc='best')
plt.tight_layout()
save_figure(figure_savepath = FIG_SAVEPATH, save_figures_extension = FIG_SAVEEXT, figure_name = 'Derivative_comparison_FD_SGFD_BMS', dpi = FIG_DPI)
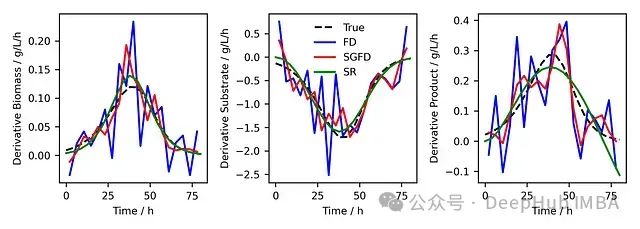
图5. 基准真实导数(黑色虚线)与通过FD计算的导数(蓝色实线)、SG平滑后用FD计算的数据(红色实线),以及符号回归平滑数据后进行解析微分(绿色实线)的对比。
图5清晰地展示了SR方法(绿线)的优越性。与FD和SG-FD方法相比,SR方法产生的导数估计更加平滑,更接近真实导数。这种改进尤其明显在数据变化较快的区域,这些区域通常是FD和SG-FD方法表现不佳的地方。
SR方法的成功在于它能够捕捉数据的整体趋势,而不是过度拟合局部噪声。通过找到一个能够很好描述整个数据集的函数表达式,SR方法能够在保持数据整体特征的同时,有效地过滤掉噪声的影响。
需要注意的是,SR方法也不是完美的。它的性能可能受到初始参数设置和计算时间的影响。此外,对于极其复杂或高度非线性的系统,SR方法可能难以找到准确的函数表达式。
总结
本文展示了在处理噪声时间序列数据时,获得可靠导数估计的几种方法。我们从最基本的有限差分法开始,然后探讨了Savitzky-Golay滤波与有限差分相结合的方法,最后介绍了符号回归这一较为先进的技术。
研究结果表明,在数据点较少且存在显著噪声的情况下,符号回归方法能够提供最可靠的导数估计。这种方法的优势在于它能够找到一个封闭形式的函数表达式来描述数据,从而允许进行解析微分。
值得注意的是,没有一种方法是万能的。选择合适的方法应该基于具体问题的特征,如数据的复杂性、噪声水平、可用的计算资源等。在实际应用中,可能需要结合多种方法并进行交叉验证,以确保结果的可靠性。
本研究的方法和发现可能对多个领域的研究者有所帮助,特别是在处理稀疏且噪声较大的时间序列数据时。例如,在生物过程工程、金融市场分析或环境监测等领域,这些技术可能会提供更准确的动态系统行为洞察。
对于那些希望深入了解符号回归在优化问题中应用的读者,我们建议参考相关的研究文献。特别地,Guimerà等人(2020)的工作为本文所用的BMS算法奠定了基础。此外,Forster等人(2024)和de Carvalho Servia(2024)的研究进一步展示了符号回归在复杂系统建模中的应用潜力。
最后,值得强调的是,本文介绍的方法并非旨在替代传统的数据分析技术,而是作为一种补充工具,特别是在处理具有挑战性的数据集时。研究者应该根据具体问题的需求和约束条件,选择最合适的方法或方法组合。
未来研究方向
基于本研究的结果,我们可以提出几个潜在的未来研究方向:
- 方法的鲁棒性分析: 对不同类型和程度的噪声,以及不同的采样频率进行系统的测试,以评估各种方法的鲁棒性。
- 自适应算法开发: 开发能够根据数据特征自动选择最佮算法或参数的智能系统。
- 计算效率优化: 特别是对于符号回归方法,研究如何提高其计算效率,使其能够处理更大规模的数据集。
- 与机器学习方法的结合: 探索将本文介绍的方法与深度学习等先进机器学习技术结合的可能性。
- 跨领域应用研究: 在更多不同的科学和工程领域测试这些方法,以验证其通用性和限制。
参考文献
- What is Machine Learning? A Primer for the Epidemiologist
- Stock Market Prediction via Deep Learning Techniques: A Survey
- Demand forecasting model for time-series pharmaceutical data using shallow and deep neural network model
- A Bayesian machine scientist to aid in the solution of challenging scientific problems
- Application of symbolic regression for constitutive modeling of plastic deformation
https://avoid.overfit.cn/post/24cb44a912ba46ceaa035c26e5f89089
相关文章:
数据稀缺条件下的时间序列微分:符号回归(Symbolic Regression)方法介绍与Python示例
时间序列概况在日常生活和专业研究中都很常见。简而言之,时间序列概况是一系列连续的数据点 y(0), y(1), …, y(t) ,其中时间 t 的点依赖于时间 t-1 的前一个点(或更早的时间点)。 在许多应用中,研究者致力于预测时间序列概况的未来行为。存在各种建模方法。这些模型通常基于过…...

XML_Tomcat_HTTP
第四章 XML_Tomcat10_HTTP 一 XML XML是EXtensible Markup Language的缩写,翻译过来就是可扩展标记语言。所以很明显,XML和HTML一样都是标记语言,也就是说它们的基本语法都是标签。 可扩展 三个字表面上的意思是XML允许自定义格式。但这不代…...

GPT Prompt
Reference https://help.openai.com/en/articles/6654000-best-practices-for-prompt-engineering-with-the-openai-apihttps://platform.openai.com/docs/guides/prompt-engineeringbilibili 8分钟系统学习提示工程,别再说大模型还不够聪明!Prompt Engineering,提示词,Few…...

go基础知识归纳总结
无缓冲的 channel 和有缓冲的 channel 的区别? 在 Go 语言中,channel 是用来在 goroutines 之间传递数据的主要机制。它们有两种类型:无缓冲的 channel 和有缓冲的 channel。 无缓冲的 channel 行为:无缓冲的 channel 是一种同步…...

【字幕】恋上数据结构与算法之014动态数组02接口设计
申请表数组英文单词叫away,而这个数组是怎么样的申请表?数组是一种顺序存储的申请表,什么叫顺序存储?就是数组里面的所有元素,它的内存地址是连续的,大家的内存是连续的,比如说举个例子…...

ffmpeg硬件解码一般流程
流程 根据硬件名称,查询是否是支持的类型 const char *device_name "qsv"; //cuda enum AVHWDeviceType type av_hwdevice_find_type_by_name(device_name); if(type AV_HWDEVICE_TYPE_NONE) {//如果一个硬件类型是不支持的,打印所有支持…...

微信支付开发-程序开发
一、操作流程图 二、后端代码实现 1、题库实现 a、列表、所有、详情、保存、启禁用、导入答题 b、获取奖品信息、保存奖品信息、 class Question extends Base {// 列表public function getList(){$param $this->request->param();$where [];if(!empty($param[title])…...

【数据结构】排序算法系列——堆排序(附源码+图解)
堆排序 堆排序基于一种常见的**[[二叉树]]结构**:堆 我们前面讲到选择排序,它在待排序的n个记录中选择一个最小的记录需要比较n一1次。本来这也可以理解,查找第一个数据需要比较这么多次是正常的,否则无法知道它是最小的记录。 …...

Linux——应用层自定义协议与序列化
目录 一应用层 1再谈 "协议" 2序列化与反序列化 3理解read,write,recv,send 4Udp vs Tcp 二网络版本计算器 三手写序列和反序列化 四进程间关系与守护进程 1进程组 1.1什么是进程组 1.2组长进程 2会话 2.1什么是会话 2.2会话下的前后台进程 3作业控…...

CGAL 从DSM到DTM-建筑物区域提取
CGAL 从DSM到DTM-建筑物区域提取 生成的DSM被用作DTM计算的基础,即地面表示为过滤掉非地面点后的另一个TIN。主要是去除一些建筑物和植被非地形点。 建筑物立面及连通区域提取 建筑物立面的特征是三角形面片的高度变化剧烈。 通过遍历每一个三角面片,…...

Python--编码解码报错
报错问题 错误信息 UnicodeDecodeError: gbk codec cant decode byte 0xac in position 2: illegal multibyte sequence 通常出现在尝试使用 GBK 编码解码某些二进制数据时,但数据中包含了无法被 GBK 解码的字符。具体错误提示是解码器在处理某个字节时发现该字节无…...

大屏可视化常用图标效果表达
1-echarts-雷达图 2-echarts-仪表盘 3-echarts-水球图(利用插件,echarts-liquidfill) 4-element UI tree 添加连接线,修改样式或使用插件(element-tree-line) 5-echarts-漏斗图 6-echarts-饼状图嵌套 optio…...

高通Liunx 系统镜像编译
本文将会介绍如何在编译高通Liunx代码, 具体可以在高通 Linux | 高通下查看相关信息。 编译服务器配置 首先,准备一台Ubuntu 22.04版本主机或者服务器 1,编译Yocto 系统,需要如下一些配置 sudo apt update sudo apt install repo gawk wg…...

105、解析Java中1000个常用类:StringTokenizer类,你学会了吗?
在线工具站 推荐一个程序员在线工具站:程序员常用工具(http://cxytools.com),有时间戳、JSON格式化、文本对比、HASH生成、UUID生成等常用工具,效率加倍嘎嘎好用。程序员资料站 推荐一个程序员编程资料站:程序员的成长之路(http://cxyroad.com),收录了一些列的技术教程…...

虚幻引擎 | 实时语音转口型 Multilingual lipsync
实时语音转口型:EPIC的metahuman sdk,NVIDIA的audio2face,都好。本文使用metahuman sdk 需要工具:Metahuman SDK网页账号,获取两日免费tokens https://space.metahumansdk.io/#/unauthorized ———————————…...

vue国际化
前言 现在的大公司都走国际化路线,我们应用程序也不例外。今天就在 Vue3 项目中整一个比较简单的国际化 背景 之前搞国际化的时候,也搜索了很多帖子,但是没有一个可以完整的实现。今天有空搞了一版,大家有什么问题欢迎留言探讨…...

解决tiktoken库调用get_encoding时SSL超时
文章目录 解决tiktoken库调用get_encoding时SSL超时1. 获取词表文件url2. 手动下载词表文件并保存到本地3. 复制并重命名文件4. 环境变量中设置tiktoken cache5. 使用tiktoken库参考资料 解决tiktoken库调用get_encoding时SSL超时 最近在看Build a Large Language Model (From…...

C++从入门到起飞之——继承上篇 全方位剖析!
🌈个人主页:秋风起,再归来~🔥系列专栏:C从入门到起飞 🔖克心守己,律己则安 目录 1、继承的概念 2、继承定义 2.1 定义格式 2.2 继承基类成员访问⽅式的变化 3、继承类模板 4、 基…...

【文件包含】——日志文件注入
改变的确很难,但结果值得冒险 本文主要根据做题内容的总结,如有错误之处,还请各位师傅指正 一.伪协议的失效 当我们做到关于文件包含的题目时,常用思路其实就是使用伪协议(php:filter,data,inpput等等)执行…...

UE5源码Windows编译、运行
官方文档 Welcome To Unreal Engine 5 Early Access Learn what to expect from the UE5 Early Access program. 链接如下:https://docs.unrealengine.com/5.0/en-US/Welcome/#gettingue5earlyaccessfromgithub Step 0:找到UE5源码 直接先上链接 https…...

魔兽争霸3性能优化与显示修复完整教程:3步实现完美游戏体验
魔兽争霸3性能优化与显示修复完整教程:3步实现完美游戏体验 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3的卡顿、界面异…...
》——从“像素认知”到“空间计算”,构建现实世界的智能操作体系)
《SpaceOS:空间操作系统白皮书(终极封神版)》——从“像素认知”到“空间计算”,构建现实世界的智能操作体系
🚀《SpaceOS:空间操作系统白皮书(终极封神版)》——从“像素认知”到“空间计算”,构建现实世界的智能操作体系(镜像视界(浙江)科技有限公司原创技术体系)🔴 …...

3步搞定Mac NTFS读写:开源工具Nigate让跨平台文件传输无忧
3步搞定Mac NTFS读写:开源工具Nigate让跨平台文件传输无忧 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and managemen…...
在工程优化中的应用)
电磁场仿真实战——5. 有限元法(FEM)在工程优化中的应用
1. 有限元法(FEM)在电磁场仿真中的核心价值 想象一下你正在设计一台新型电机,需要精确计算内部电磁场的分布。传统解析方法面对复杂几何结构时束手无策,而有限元法就像把整个电机拆解成无数个"乐高积木",在每…...

5G NR物理层控制信令实战:从PDCCH盲解码到DCI格式解析
5G NR物理层控制信令实战:从PDCCH盲解码到DCI格式解析 在5G新空口(NR)系统中,物理层控制信令是实现高效资源调度和可靠数据传输的核心机制。作为无线通信协议栈开发工程师和网络优化人员,深入理解PDCCH盲解码机制、COR…...

AI Agent与边缘计算结合:低延迟场景下的智能体部署方案
AI Agent与边缘计算结合:低延迟场景下的智能体部署方案 关键词:AI Agent、边缘计算、低延迟部署、模型压缩、资源调度、隐私计算、多智能体协同 摘要:本文将像给小学生讲“快递柜前置配送奶茶”的故事一样,深入浅出地解释AI Agent和边缘计算是什么、为什么要把它们结合、如…...
,OpenClaw Auto-Dream 实战从入门到精通,收藏这一篇就够了!)
让 AI Agent “睡觉”整理记忆(非常详细),OpenClaw Auto-Dream 实战从入门到精通,收藏这一篇就够了!
你有没有遇到过这样的情况:辛辛苦苦教会了 AI Agent 你的工作习惯和项目背景,关掉窗口、重启会话后,它又变回了一张白纸?这是当前所有基于 LLM(大语言模型)的 Agent 面临的核心痛点——“聊完就忘”。2026 …...

3个关键优化:如何让Stable Diffusion模型在普通硬件上流畅运行?
3个关键优化:如何让Stable Diffusion模型在普通硬件上流畅运行? 【免费下载链接】chilloutmix_NiPrunedFp32Fix 项目地址: https://ai.gitcode.com/hf_mirrors/emilianJR/chilloutmix_NiPrunedFp32Fix 你是否曾经尝试运行Stable Diffusion模型&a…...

谷歌:子目标驱动提升长程智能体
📖标题:A Subgoal-driven Framework for Improving Long-Horizon LLM Agents 🌐来源:arXiv, 2603.19685v1 🌟摘要 基于大语言模型(LLM)的代理已经成为数字环境的强大自主控制器,跨越…...

DeepAnalyze模型量化部署实战:减小50%显存占用
DeepAnalyze模型量化部署实战:减小50%显存占用 1. 引言 你是不是遇到过这样的情况:好不容易找到一个强大的AI模型,比如最近很火的DeepAnalyze数据分析大模型,结果发现自己的显卡根本跑不起来?8GB显存的消费级显卡只能…...