【YOLO学习】YOLOv1详解
文章目录
- 1. 概述
- 2. 算法流程
- 3. 网络结构
- 4. 损失函数
1. 概述
1. YOLO 的全称是 You Only Look Once: Unified, Real-Time Object Detection。YOLOv1 的核心思想就是利用整张图作为网络的输入,直接在输出层回归 bounding box 的位置和 bounding box 所属的类别。简单来说,只看一次就知道图中物体的类别和位置。
2. 将一幅图像分成 SxS 个网格(grid cell),如果某个 object 的中心落在这个网格中,则这个网格就负责预测这个 object。一个格子只能预测一个物体,会生成两个预测框。


注:这里的 ( x , y , w , h , c ) (x,y,w,h,c) (x,y,w,h,c) 和 7 × 7 × 30 7×7×30 7×7×30 请看下文讲解。
3. 每个网格要预测 B 个bounding box(B一般取2),每个 bounding box 除了要回归自身的位置之外,还要附带预测一个 confidence 值。每个 bounding box 共 5 个参数 ( x , y , w , h , c ) (x,y,w,h,c) (x,y,w,h,c)。
- 使用 ( x , y ) (x,y) (x,y) 表示 bounding box 中心相对于方格左上角的偏移量,范围为 [0,1]。
- 使用 ( w , h ) (w,h) (w,h) 表示 bounding box 的宽和高,该值是相对于图像宽高的比,范围为 [0,1]。


- confidence 代表了所预测的 box 中含有 object 的置信度(有则为 1,没有则为 0)和这个 box 预测的有多准两重信息,其值是这样计算的:

该表达式含义:如果有 object 落在一个 grid cell 里,则第一项取 1,否则取 0。 第二项是预测的预测框(predict box)与真实标签框(ground truth)之间的交集(IOU)值。
问题:为什么每个网格有固定的 B 个 bounding box?(即 B=2)
在训练的时候会在线地计算每个 predictor 预测的 bounding box 和 ground truth 的 IOU,计算出来的 IOU 大的那个 predictor,就会负责预测这个物体,另外一个则不预测。这么做有什么好处?我的理解是,这样做的话,实际上有两个 predictor 来一起进行预测,然后网络会在线选择预测得好的那个 predictor(也就是 IOU 大)来进行预测。
2. 算法流程
整个 YOLO 检测系统如下图所示:

- 假设网络实现的预测类别数为 C 个。论文中使用 PASCAL VOC 数据集,C=20,即实现 20 类别物品的目标检测。
- 输入图像首先被 resize 到指定尺寸。论文中将输入图像统一调整到 448 × 448 448 × 448 448×448,即网络输入: 448 × 448 × 3 448 × 448 × 3 448×448×3。
- 对图像进行划分,共划分 S × S S×S S×S 个方格。论文中 S=7, 即共划分 7 × 7 = 49 7 × 7 = 49 7×7=49 个方格,每个方格包含 64 × 64 64 × 64 64×64 个像素点。
- 针对每个方格:生成 C 个类别目标的概率分数(表示该方格是否存在该目标的概率),用 p 表示;生成 B 个检测框,每个检测框共 5 个参数,即 ( x , y , w , h , c ) (x,y,w,h,c) (x,y,w,h,c)。
每个方格输出向量如下图所示。因此针对每个方格,共有参数量为 ( C + B × 5 ) (C+B×5) (C+B×5) 个。本论文中,即 ( 20 + 2 × 5 ) = 30 (20+2×5)=30 (20+2×5)=30 个。

- 针对一张图片,最终输出向量: S × S × ( C + B × 5 ) S×S×(C+B×5) S×S×(C+B×5)。本论文中即 7 × 7 × 30 = 1470 7 × 7 × 30 = 1470 7×7×30=1470。
- 对输出向量进行后处理,得到最终预测结果。
3. 网络结构
1. 网络结构如下所示。输入: 448 × 448 × 3 448×448×3 448×448×3,输出: 7 × 7 × 30 7×7×30 7×7×30。

针对卷积我们以图片的前两次为例计算一下。卷积计算大致就是如下所示这么一个过程。

2. 网络详解:
(1) YOLO 主要是建立一个 CNN 网络生成预测 7 × 7 × 1024 7×7×1024 7×7×1024 的张量 。
(2) 然后使用两个全连接层执行线性回归,以进行 7 × 7 × 2 7×7×2 7×7×2 边界框预测。将具有高置信度得分(大于 0.25)的结果作为最终预测。
(3) 在 3 × 3 3×3 3×3 的卷积后通常会接一个通道数更低 1 × 1 1×1 1×1 的卷积,这种方式既降低了计算量,同时也提升了模型的非线性能力。
(4) 除了最后一层使用了线性激活函数外,其余层的激活函数为 Leaky ReLU 。
(5) 在训练中使用了 Dropout 与数据增强的方法来防止过拟合。
(6) 对于最后一个卷积层,它输出一个形状为 (7, 7, 1024) 的张量。 然后张量展开。使用 2 个全连接层作为一种线性回归的形式,它输出 1470 个参数,然后 reshape 为 (7, 7, 30) 。

4. 损失函数
1. 损失即计算网络输出值(或预测值)与标签值差异的程度。举例说明,如上图的包含狗狗的方格,对应的标签值与预测值形式如下:

2. YOLOv1 中损失函数共包含三项,即:(1) 坐标预测损失、(2) 置信度预测损失、(3) 类别预测损失。三个损失函数都使用了均方误差。计算公式如下所示:


问题:为什么坐标损失中的 w w w 和 h h h 要加根号?
在上图中,大框和小框的 bounding box 和 ground truth 都是差了一点,但对于实际预测来讲,大框(大目标)差的这一点也许没啥事儿,而小框(小目标)差的这一点可能就会导致bounding box的方框和目标差了很远。而如果还是使用第一项那样直接算平方和误差,就相当于把大框和小框一视同仁了,这样显然不合理。而如果使用开根号处理,就会一定程度上改善这一问题 。


3. 损失函数解释:
(1) 特殊符号含义:

(2) 坐标损失:

(3) 置信度损失:

(4) 分类损失:

相关文章:
【YOLO学习】YOLOv1详解
文章目录 1. 概述2. 算法流程3. 网络结构4. 损失函数 1. 概述 1. YOLO 的全称是 You Only Look Once: Unified, Real-Time Object Detection。YOLOv1 的核心思想就是利用整张图作为网络的输入,直接在输出层回归 bounding box 的位置和 bounding box 所属的类别。简单…...
HarmonyOS应用开发(组件库)--组件模块化开发、工具包、设计模式(持续更新)
致力于,UI开发拿来即用,提高开发效率 常量格式枚举enum格式正则表达式...手机号校验...邮箱校验 文件判断文件是否存在 网络下载下载图片从沙箱中图片转为Base64格式从资源文件中读取图片转Base64 组件输入框...矩形输入框...输入框堆叠效果(…...

python测试开发---前后端交互Axios
Axios 是一个基于 Promise 的 HTTP 客户端,常用于浏览器和 Node.js 中发送 HTTP 请求。它封装了 XMLHttpRequest 和 Node.js 的 http 模块,使得处理网络请求更加简单和直观,尤其适合处理异步请求。以下是 Axios 的基础概念和使用方法…...

删除视频最后几帧 剪切视频
删除视频最后几帧 剪切视频 remove_last.py import subprocess def remove_last_frame(input_file, output_file, frame_rate):command_duration [ffprobe,-v, error,-show_entries, formatduration,-of, defaultnoprint_wrappers1:nokey1,input_file]try:total_duration fl…...

SSM框架学习(四、SpringMVC实战:构建高效表述层框架)
目录 一、SpringMVC简介和体验 1.介绍 2.主要作用 3.核心组件和调用流程理解 4.快速体验 二、SpringMVC接收数据 1.访问路径设置 (1)精准路径匹配 (2)模糊路径匹配 (3)类和方法上添加 RequestMapp…...

戴尔笔记本电脑——重装系统
说明:我的电脑是戴尔G3笔记本电脑。 第一步:按照正常的装系统步骤,配置并进入U盘的PE系统 如果进入PE系统,一部分的硬盘找不到,解决办法:U盘PE系统——出现部分硬盘找不到的解决办法 第二步:磁…...

领夹麦克风哪个品牌音质最好,主播一般用什么麦克风
在这个信息爆炸的时代,清晰的声音传达显得尤为重要。无论是激情澎湃的演讲,还是温馨动人的访谈,一款优质的无线领夹麦克风都能让声音清晰的传播。但市场上产品繁多,如何挑选出性价比高、性能卓越的无线领夹麦克风呢?本…...

华为静态路由(route-static)
静态路由的组成 在华为路由器中,使用ip route-static命令配置静态路由。 一条静态路由主要包含以下要素: 目的地址:数据包要到达的目标IP地址 子网掩码:用于指定目的地址的网络部分和主机部分 下一跳地址(可选&#…...
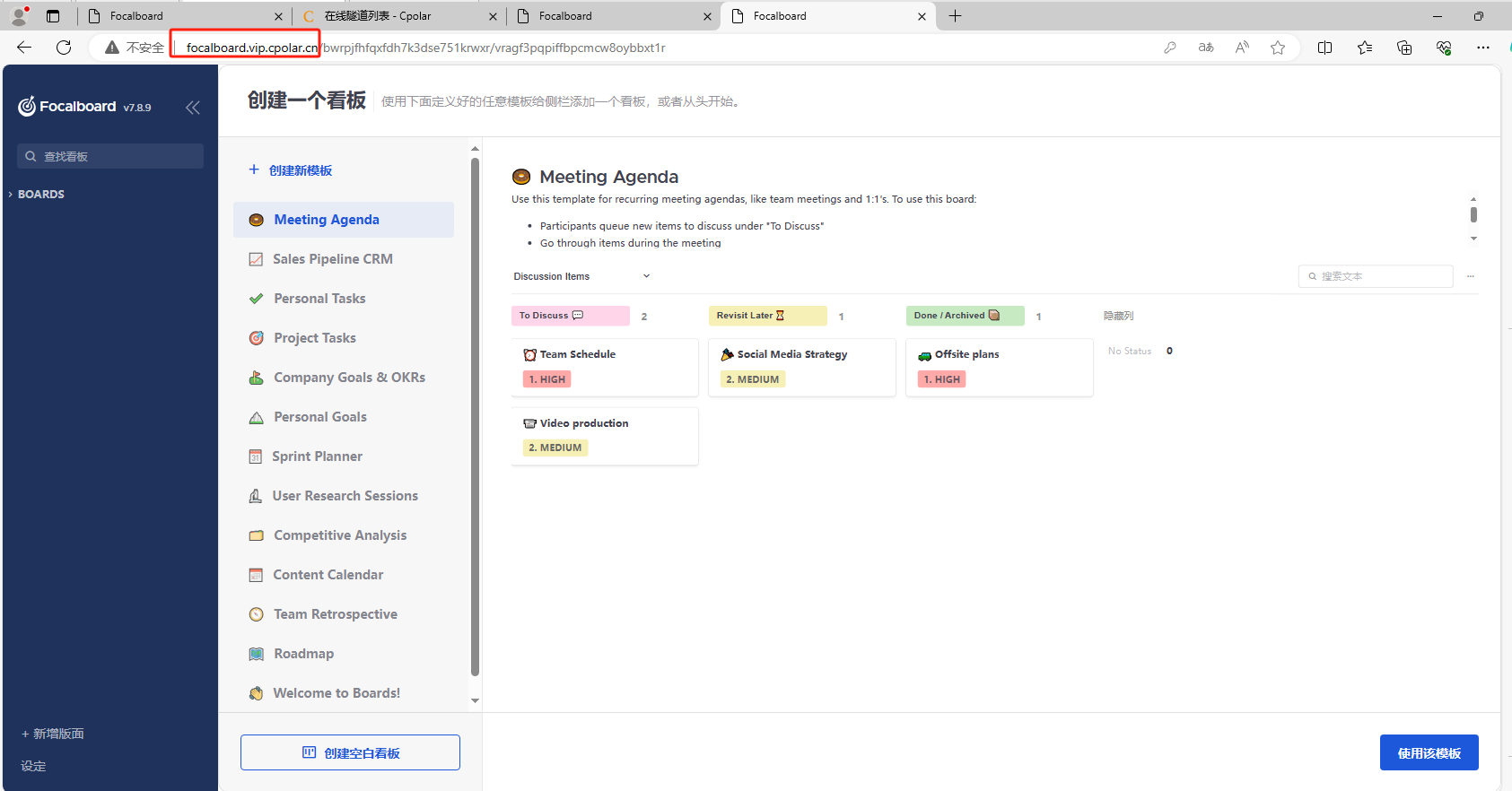
Focalboard开源项目管理系统本地Windows部署与远程访问协同办公
文章目录 前言1. 使用Docker本地部署Focalboard1.1 在Windows中安装 Docker1.2 使用Docker部署Focalboard 2. 安装Cpolar内网穿透工具3. 实现公网访问Focalboard4. 固定Focalboard公网地址 💡 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂&am…...

Java如何操作Elasticsearch
目录 前言 Procuct实体类 一、操作索引 二、操作文档 三、查询文档 四、复杂条件查询 五、分页查询 六、结果排序 本文文章介绍的是通过template的方法操作elasticsearch,他的话直接本地注入使用就行,repository方法还需要实现接口,所…...

cpu路、核、线程、主频、缓存
路:主板插口实际插入的 CPU 个数,也可以理解为主板上支持的CPU的数量。每个CPU插槽可以插入一个物理处理器芯片。例如,一台服务器可能有2路或4路插槽,这意味着它最多可以安装2个或4个物理处理器。 核:单块 CPU 上面能…...

【AI算法岗面试八股面经【超全整理】——深度学习】
AI算法岗面试八股面经【超全整理】 概率论【AI算法岗面试八股面经【超全整理】——概率论】信息论【AI算法岗面试八股面经【超全整理】——信息论】机器学习【AI算法岗面试八股面经【超全整理】——机器学习】深度学习【AI算法岗面试八股面经【超全整理】——深度学习】NLP【A…...
STL——map和set【map和set的介绍和使用】【multimap和multiset】
目录 map和set1.关联式容器2.键值对3.树形结构的关联式容器3.1set3.1.1set的介绍3.1.2set的使用3.1.2.1set的模版参数列表3.1.2.2set的构造3.1.2.3set的迭代器3.1.2.4set基本接口的使用3.1.2.5set使用案例 3.2map3.2.1map介绍3.2.2map的使用3.2.2.1map的构造3.2.2.2map的迭代器…...

【笔记】神领物流配置本地hosts无法访问域名(排除DNS 排除文件编码问题)已解决
第一次看着文档准备项目 踩坑不少 一遇到问题总是想着先自己解决 其实文档里就有解决方法 看文字总是喜欢跳过 导入虚拟机的时候忘记了给它设置ip地址 按照文档来就好了 配置完之后立刻就可以通过域名访问了 以防万一写一个本地hosts文件的路径在这里 通常来说都是ÿ…...

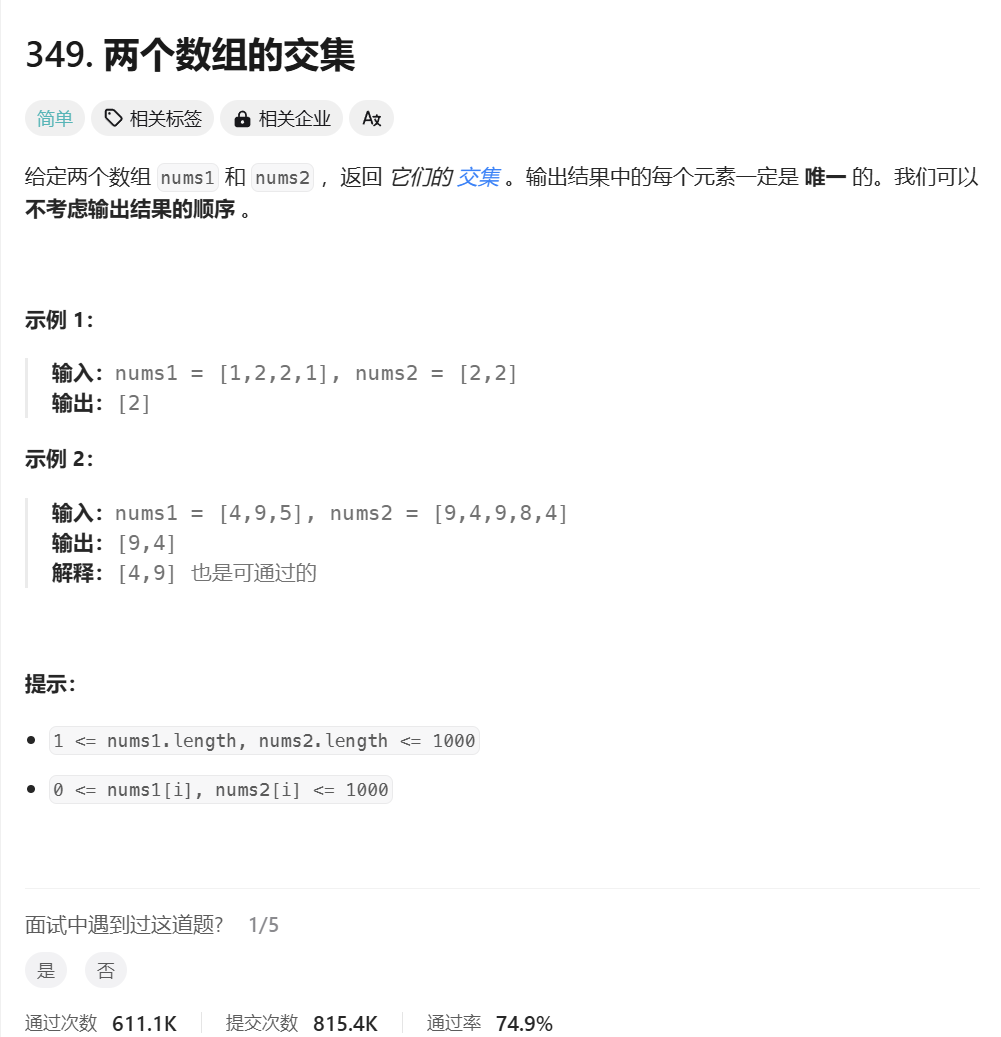
Java | Leetcode Java题解之第424题替换后的最长重复字符
题目: 题解: public class Solution {public int characterReplacement(String s, int k) {int len s.length();if (len < 2) {return len;}char[] charArray s.toCharArray();int left 0;int right 0;int res 0;int maxCount 0;int[] freq n…...

Xcode 16 Pod init 报错
pod init failed in Xcode 16 Issue #12583 CocoaPods/CocoaPods GitHub 根据你提供的步骤,以下是详细的操作指南来解决 CocoaPods 的问题: ### 步骤 1:在 Xcode 中转换项目文件夹为组 1. 打开你的 Xcode 项目。 2. 在左侧的项目导航器…...

【数据结构】Java的HashMap 和 HashSet 大全笔记,写算法用到的时候翻一下,百度都省了!(实践篇)
本篇会加入个人的所谓鱼式疯言 ❤️❤️❤️鱼式疯言:❤️❤️❤️此疯言非彼疯言 而是理解过并总结出来通俗易懂的大白话, 小编会尽可能的在每个概念后插入鱼式疯言,帮助大家理解的. 🤭🤭🤭可能说的不是那么严谨.但小编初心是能让更多人…...

Docker 教程:如何查看容器的最后 300 行实时日志
Docker 教程:如何查看容器的最后 300 行实时日志 文章目录 Docker 教程:如何查看容器的最后 300 行实时日志Docker 日志简介查看容器日志的基本命令查看最后 300 行实时日志的具体命令参数解释 实际案例演示示例输出 常见问题解答如何退出实时日志的查看…...

Qwen2-VL论文阅读笔记
第1章介绍 论文亮点: 1、 the Naive Dynamic Resolution mechanism 2、Multimodal Rotary Position Embedding (M-RoPE) 2D Rotary Position Embedding 3、统一图片和视频的处理范式、增i强视觉感知能力 4、LVLMs的scaling laws:2B、8B、72B 5、 dynamic…...

APScheduler、Django实现定时任务,以及任务动态操作
环境:Windows 11、python 3.12.3、Django 4.2.11、 APScheduler 3.10.4 背景:工作需要使用且用法较为复杂,各种功能基本都使用了 事件:20240920 说明:记录,方便后期自己查找 1、搭建基础环境 文件结构图…...

避开这5个坑,你的癫痫脑电AI模型准确率能翻倍:从数据标注到特征工程实战
避开这5个坑,你的癫痫脑电AI模型准确率能翻倍:从数据标注到特征工程实战 在医疗AI领域,癫痫脑电信号分析一直是个充满挑战的课题。许多开发者满怀信心地构建模型,却在验证阶段遭遇性能瓶颈——准确率停滞不前,误报率居…...

3步轻松掌握:163MusicLyrics歌词下载完全指南
3步轻松掌握:163MusicLyrics歌词下载完全指南 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为找不到高质量的LRC歌词而烦恼吗?163MusicLyri…...

从零到一:基于HappyBase的HBase Python应用实战指南
1. 环境准备与基础配置 第一次接触HBase和HappyBase时,环境配置往往是最让人头疼的部分。记得我刚开始搭建环境时,花了整整两天时间才把所有服务调通。为了让各位少走弯路,我把这些年积累的经验都整理在这里。 首先需要明确的是,…...

如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验?
如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验? 【免费下载链接】jellyfin-androidtv Android TV Client for Jellyfin 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-androidtv 想要在智能电视上享受专业的媒体管理体验吗?…...

告别Python依赖!手把手教你用C++复现Librosa的Mel频谱和MFCC特征提取
高性能C音频特征提取实战:从Librosa原理到嵌入式部署优化 在语音识别和音频分析领域,Mel频谱和MFCC特征提取是基础但关键的技术环节。许多开发者习惯使用Python的Librosa库快速实现原型,但当需要部署到生产环境时,Python的解释器性…...

【实战指南】STM32CubeMX UART配置进阶:从阻塞到中断+DMA的高效数据通信
1. UART通信模式选择指南 第一次接触STM32的UART通信时,很多人都会纠结该用哪种模式。我在实际项目中尝试过所有模式,总结下来就是:没有最好的模式,只有最适合当前场景的模式。先说说三种典型场景: 调试打印࿱…...

终极免费城通网盘直连解析工具:告别下载限速的完整指南
终极免费城通网盘直连解析工具:告别下载限速的完整指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载速度慢、等待时间长而烦恼吗?ctfileGet是一款专为城通…...

iOS越狱终极指南:解锁iPhone隐藏功能的3个关键步骤
iOS越狱终极指南:解锁iPhone隐藏功能的3个关键步骤 【免费下载链接】Jailbreak iOS 26.4 - 26, 17 - 17.7.5 & iOS 18 - 18.7.3 Jailbreak Tools, Cydia/Sileo/Zebra Tweaks & Jailbreak News Updates || AI Jailbreak Finder 👇 项目地址: ht…...

智慧树自动刷课神器Autovisor:3分钟极速上手的完整指南
智慧树自动刷课神器Autovisor:3分钟极速上手的完整指南 【免费下载链接】Autovisor 2025智慧树刷课脚本 基于Python Playwright的自动化程序 [有免安装版] 项目地址: https://gitcode.com/gh_mirrors/au/Autovisor 还在为智慧树平台的繁琐操作而烦恼吗&#…...

JetBrains IDE试用期重置终极指南:3种简单方法实现30天无限续杯
JetBrains IDE试用期重置终极指南:3种简单方法实现30天无限续杯 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 你是否在使用IntelliJ IDEA、PyCharm、WebStorm等JetBrains IDE时遇到过试用期突然结束…...