03Frenet与Cardesian坐标系(Frenet转Cardesian公式推导)
Frenet转Cardesian
1 明确目标
已知车辆质点在Frenet坐标系下的状态:
- Frenet 坐标系下的纵向坐标: s s s
- 纵向速度: s ˙ \dot{s} s˙
- 纵向加速度: s ¨ \ddot{s} s¨
- 横向坐标: l l l
- 横向速度: l ˙ \dot{l} l˙
- 横向加速度: l ¨ \ddot{l} l¨
- 横向坐标变化率: l ′ l' l′
- 横向坐标的二阶变化率: l ′ ′ l'' l′′
已知参考线上任意点状态(下述状态在参考线生成后都可以通过计算得到):
- 参考线上的任意点: s r s_r sr和其对应的 r r ⃗ \vec{r_r} rr
- 参考线上任意点的单位切向量: τ r ⃗ \vec{\tau_r} τr
- 参考线上任意点的单位法向量: n r ⃗ \vec{n_r} nr
- 参考线上任意点的曲率: κ r \kappa_r κr
- 参考线上任意点的曲率变化率: κ r ′ \kappa_r' κr′
求解车辆质点在Cardesian坐标系下的状态:
- 位置向量: r h ⃗ \vec{r_h} rh
- 速度向量: v h ⃗ \vec{v_h} vh
- 切线方向与 x x x轴夹角: θ h \theta_h θh
- 加速度向量: a h ⃗ \vec{a_h} ah
- 曲率: κ h \kappa_h κh
2 公式推导
2.1 基础公式汇总
为了方便查阅,现将前文《01》推导的Frenet基础公式汇总如下:
- 核心关系
r h ⃗ = r r ⃗ + l n r ⃗ (2-1) \vec{r_h} = \vec{r_r} + l\vec{n_r}\tag{2-1} rh=rr+lnr(2-1)
- Frenet最小状态集
l ˙ = l ′ s ˙ (2-2) \dot{l} = l'\dot{s}\tag{2-2} l˙=l′s˙(2-2)
l ¨ = l ′ ′ s ˙ 2 + l ′ s ¨ (2-3) \ddot{l} = l''\dot{s}^2+l'\ddot{s}\tag{2-3} l¨=l′′s˙2+l′s¨(2-3)
-
车辆在Cardesian下的向量导数
r h ⃗ ˙ = v h ⃗ = ∣ v h ⃗ ∣ τ h ⃗ = v h τ h ⃗ (2-4) \dot{\vec{r_h}} = \vec{v_h}= |\vec{v_h}|\vec{\tau_h}=v_h\vec{\tau_h}\tag{2-4} rh˙=vh=∣vh∣τh=vhτh(2-4)τ h ⃗ ˙ = κ h v h n h ⃗ (2-5) \dot{\vec{\tau_h}} = \kappa_hv_h\vec{n_h}\tag{2-5} τh˙=κhvhnh(2-5)
n h ⃗ ˙ = − κ h v h τ h ⃗ (2-6) \dot{\vec{n_h}} =-\kappa_hv_h\vec{\tau_h}\tag{2-6} nh˙=−κhvhτh(2-6)
v h ⃗ ˙ = a h ⃗ = a τ τ h ⃗ + κ h v h 2 n h ⃗ (2-7) \dot{\vec{v_h}} = \vec{a_h} = a_{\tau}\vec{\tau_h} +\kappa_h v_h^2 \vec{n_h}\tag{2-7} vh˙=ah=aττh+κhvh2nh(2-7)
-
匹配点在Cardesian下的向量导数
r r ⃗ ˙ = v r ⃗ = ∣ v r ⃗ ∣ τ r ⃗ = s ˙ τ r ⃗ (2-8) \dot{\vec{r_r}} = \vec{v_r}= |\vec{v_r}|\vec{\tau_r}=\dot{s}\vec{\tau_r}\tag{2-8} rr˙=vr=∣vr∣τr=s˙τr(2-8)τ r ⃗ ˙ = κ r s ˙ n r ⃗ (2-9) \dot{\vec{\tau_r}} = \kappa_r \dot{s} \vec{n_r}\tag{2-9} τr˙=κrs˙nr(2-9)
n r ⃗ ˙ = − κ r s ˙ τ r ⃗ (2-10) \dot{\vec{n_r}} =-\kappa_r \dot{s}\vec{\tau_r}\tag{2-10} nr˙=−κrs˙τr(2-10)
2.2 求解 r h ⃗ \vec{r_h} rh
根据(2-1)有:
r h ⃗ = r r ⃗ + l n r ⃗ (2-11) \vec{r_h} = \vec{r_r} + l\vec{n_r}\tag{2-11} rh=rr+lnr(2-11)
2.3 求解 v h ⃗ \vec{v_h} vh
v h ⃗ = r h ⃗ ˙ = r r ⃗ ˙ + l ˙ n r ⃗ + l n r ⃗ ˙ = s τ r ⃗ + l ˙ n r ⃗ − κ r s ˙ τ r ⃗ (2-12) \begin{align} \vec{v_h} &= \dot{\vec{r_h}}\\ &= \dot{\vec{r_r}} + \dot{l}\vec{n_r} + l\dot{\vec{n_r}}\\ &= s\vec{\tau_r} + \dot{l}\vec{n_r} -\kappa_r\dot{s}\vec{\tau_r} \end{align}\tag{2-12} vh=rh˙=rr˙+l˙nr+lnr˙=sτr+l˙nr−κrs˙τr(2-12)
可以进一步求得
v h = ∣ v h ⃗ ∣ θ h = a r g ( v h ⃗ ) (2-13) \begin{align} v_h &= |\vec{v_h}|\\ \theta_h&=arg(\vec{v_h}) \end{align}\tag{2-13} vhθh=∣vh∣=arg(vh)(2-13)
其中,arg代表求向量的相位角。
求出了 v h ⃗ \vec{v_h} vh,可以进一步求得
τ h ⃗ = v h ⃗ v h (2-14) \vec{\tau_h} = \frac{\vec{v_h}}{v_h} \tag{2-14} τh=vhvh(2-14)
对于二维平面,
n h ⃗ = A τ h ⃗ = [ 0 − 1 1 0 ] τ h ⃗ (2-15) \begin{align} \vec{n_h} &= A\vec{\tau_h} \\ &= \left[ \begin{array}{cc} 0 & -1 \\ 1 & 0 \\ \end{array} \right]\vec{\tau_h} \end{align}\tag{2-15} nh=Aτh=[01−10]τh(2-15)
其中, A A A 是一个二维变换矩阵
Tips:如果是编码的话,(2-15)的乘法也可以直接通过调换坐标进行等价替换,可以进一步提升计算效率。例如, τ h ⃗ = ( x x 2 + y 2 , y x 2 + y 2 ) \vec{\tau_h}=(\frac{x}{\sqrt{x^2+y^2}},\frac{y}{\sqrt{x^2+y^2}}) τh=(x2+y2x,x2+y2y),则 n h ⃗ = ( − y x 2 + y 2 , x x 2 + y 2 ) \vec{n_h}=(\frac{-y}{\sqrt{x^2+y^2}},\frac{x}{\sqrt{x^2+y^2}}) nh=(x2+y2−y,x2+y2x)。
2.4 求解 a h ⃗ \vec{a_h} ah
a h ⃗ = v h ⃗ ˙ = s ˙ τ r ⃗ + s τ r ⃗ ˙ + l ¨ n r ⃗ + l ˙ n r ⃗ ˙ − κ r ( s ¨ τ r ⃗ + s ˙ τ r ⃗ ˙ ) = s ˙ τ r ⃗ + s κ r s ˙ n r ⃗ + l ¨ n r ⃗ + ( − κ r s ˙ τ r ⃗ l ˙ ) + ( − κ r s ¨ τ r ⃗ ) + ( − κ r s ˙ κ r s ˙ n r ⃗ ) = [ ( 1 − κ r l ˙ ) s ˙ − κ r s ¨ ] τ r ⃗ + ( κ r s s ˙ + l ¨ − κ r 2 s ˙ 2 ) n r ⃗ (2-16) \begin{align} \vec{a_h} &= \dot{\vec{v_h}}\\ &= \dot{s}\vec{\tau_r}+s\dot{\vec{\tau_r}} + \ddot{l}\vec{n_r} + \dot{l}\dot{\vec{n_r}} - \kappa_r(\ddot{s}\vec{\tau_r} + \dot{s}\dot{\vec{\tau_r}})\\ &= \dot{s}\vec{\tau_r} + s\kappa_r \dot{s} \vec{n_r} + \ddot{l}\vec{n_r} +(-\kappa_r \dot{s}\vec{\tau_r}\dot{l})+(-\kappa_r\ddot{s}\vec{\tau_r}) + (-\kappa_r\dot{s}\kappa_r \dot{s} \vec{n_r})\\ &=[(1-\kappa_r\dot{l})\dot{s}-\kappa_r\ddot{s}]\vec{\tau_r} + (\kappa_rs\dot{s}+\ddot{l}-\kappa_r^2\dot{s}^2)\vec{n_r} \end{align}\tag{2-16} ah=vh˙=s˙τr+sτr˙+l¨nr+l˙nr˙−κr(s¨τr+s˙τr˙)=s˙τr+sκrs˙nr+l¨nr+(−κrs˙τrl˙)+(−κrs¨τr)+(−κrs˙κrs˙nr)=[(1−κrl˙)s˙−κrs¨]τr+(κrss˙+l¨−κr2s˙2)nr(2-16)
可以进一步求得
a τ = a h ⃗ τ h ⃗ a n = a h ⃗ n h ⃗ (2-17) \begin{align} a_\tau &= \vec{a_h}\vec{\tau_h} \\ a_n &=\vec{a_h}\vec{n_h} \end{align}\tag{2-17} aτan=ahτh=ahnh(2-17)
2.5 求解 κ h \kappa_h κh
由(2-7)可得
κ h = a n v h 2 (2-18) \kappa_h = \frac{a_n}{v_h^2} \tag{2-18} κh=vh2an(2-18)
3 总结
- 还是坚持使用向量推导的一贯作风,不引入三角函数,会使得表达式更简洁;
- 编码时使用向量实现是否比三角函数更快还需要进一步实验(理论上会更快)。
相关文章:
)
03Frenet与Cardesian坐标系(Frenet转Cardesian公式推导)
Frenet转Cardesian 1 明确目标 已知车辆质点在Frenet坐标系下的状态: Frenet 坐标系下的纵向坐标: s s s纵向速度: s ˙ \dot{s} s˙纵向加速度: s \ddot{s} s横向坐标: l l l横向速度: l ˙ \dot{l} l…...

knowLedge-Vue I18n 是 Vue.js 的国际化插件
1.简介 Vue I18n 是 Vue.js 的国际化插件,它允许开发者根据不同的语言环境显示不同的文本,支持多语言。 Vue I18n主要有两个版本:v8和v9。v8版本适用于Vue2框架。v9版本适用于Vue3框架。 2. 翻译实现原理 Vue I18n 插件通过在 Vue 实例中注…...

【开源免费】基于SpringBoot+Vue.JS微服务在线教育系统(JAVA毕业设计)
本文项目编号 T 060 ,文末自助获取源码 \color{red}{T060,文末自助获取源码} T060,文末自助获取源码 目录 一、系统介绍二、演示录屏三、启动教程四、功能截图五、文案资料5.1 选题背景5.2 国内外研究现状5.3 可行性分析 六、核心代码6.1 查…...

expressjs 中的mysql.createConnection,execute 怎么使用
在 Express.js 应用中使用 MySQL 数据库,你通常会使用 mysql 或 mysql2 这样的库来创建和管理数据库连接,并执行查询。然而,mysql.createConnection 并不直接提供 execute 方法。相反,你可以使用 query 方法来执行 SQL 语句。 以…...

每日一题|983. 最低票价|动态规划、记忆化递归
本题求解最小值,思路是动态规划,但是遇到的问题是:动态规划更新的顺序和步长,以及可能存在的递归溢出问题。 1、确定dp数组含义 dp[i]表示第i天到最后一天(可能不在需要出行的天数里),需要花费…...

oracle 正则 匹配 身份正 手机号
1.正则匹配身份证号: regexp_like(card_id,^[1-9]\d{5}(18|19|20)?\d{2}(0[1-9]|1[0-2])(0[1-9]|[12]\d|3[01])\d{3}(\d|X)$) ^[1-9]\d{5}(18|19|20)?\d{2}(0[1-9]|1[0-2])(0[1-9]|[12]\d|3[01])\d{3}(\d|X)$ ^[1-9]:第一位数字不能为0。 \d{5}:接下来…...
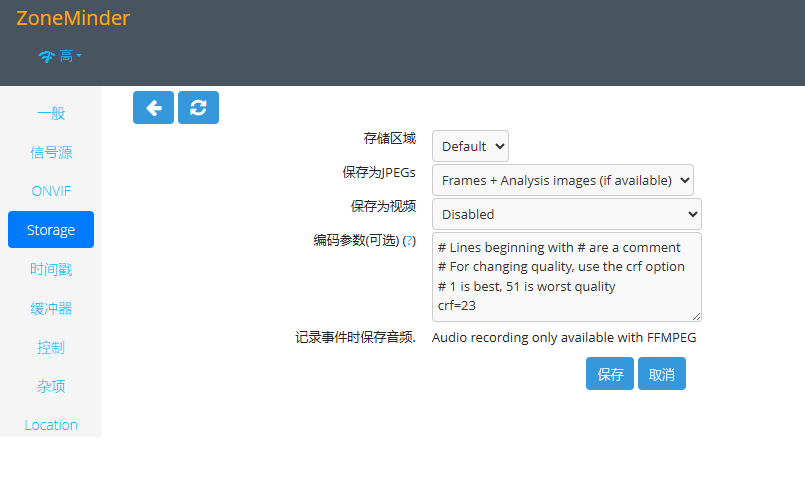
在树莓派上部署开源监控系统 ZoneMinder
原文:https://blog.iyatt.com/?p17425 前言 自己搭建,可以用手里已有的设备,不需要额外买。这套系统的源码是公开的,录像数据也掌握在自己手里,不经过不可控的三方。 支持设置访问账号 可以保存录像,启…...

2022年6月 Frontier 获得性能第一的论文翻译
为百万兆级加速架构做高性能 Linpack 优化 摘要 我们详细叙述了在 rocHPL 中做的性能优化,rocHPL 是 AMD 对 HPL 基准的开源实现,主要是针对节点进行优化的架构,是为百万兆级系统而设计的,比如:Frontier suppercomput…...
B2B商城交易解决方案:赋能企业有效重塑采购与销售新生态
在电商零售领域,商城系统始终是企业搭建商城的关键利器。 伴随着电商行业的蓬勃发展,各类新模式层出不穷,各种商城系统也应运而生,其中B2B商城更是最为常见的一种。 近年来,得益于电子商务的迅猛发展,B2B商…...
)
初始C语言(五)
前言 本文章就代表C语言介绍以及了解正式完成,后续进行具体分析和详细解析学习。知识根深蒂固才可以应付后来的学习,地基要打好,后续才会轻松。 十四、结构体 结构体是C语言中最最重要的知识点,使得C语言有能力描述复杂的类型。 …...
(29))
mysql学习教程,从入门到精通,SQL 修改表(ALTER TABLE 语句)(29)
1、SQL 修改表(ALTER TABLE 语句) 在编写一个SQL的ALTER TABLE语句时,你需要明确你的目标是什么。ALTER TABLE语句用于在已存在的表上添加、删除或修改列和约束等。以下是一些常见的ALTER TABLE语句示例,这些示例展示了如何修改表…...

【网络基础】网络常识快速入门知识清单,看这篇文章就够了
💐个人主页:初晴~ 在现在这个高度智能化的时代,网络几乎已经成为了空气一般无处不在。移动支付、网上购物、网络游戏、视频网站都离不开网络。你能想象如果没有网络的生活将会变成什么样吗🤔 然而如此对于如此重要的网络…...
问题)
OceanBase 关于一号表笔记与ERROR 1060(42S21)问题
OceanBase 关于客户端访问OceanBase 的表数据的过程说明 1.OBserver中的location cache 会保存observer 曾经访问过的实体表的位置信息(meta table 主要包括 __all_core_table、__all_root_table、__all_tenant_meta_table 三张内部表。OB 集群中所有实体表的 location&#x…...

【四】Spring Cloud OpenFeign原理分析
Spring Cloud OpenFeign原理分析 概述 Spring Cloud 微服务实践也有挺多年了,一直想着总结一下这系列的知识点,最近终于下定决心来出一个Spring Cloud 系列文章了。本文主要围绕fegin组件来进行讲解,文中将会给出基础使用的示例,还…...

EDM平台大比拼 用户体验与营销效果双重测评
本文评测了ZohoCampaigns、Mailchimp、Sendinblue、AWeber四款EDM平台,分别适合中小企业、多平台集成、多功能集成、初学者等需求。建议企业根据自身规模、技术水平和功能需求选择最适合的平台。 一、Zoho Campaigns 功能概述 Zoho Campaigns是Zoho旗下的一款专注…...
)
开卷可扩展自动驾驶(OpenDriveLab)
一种通用的视觉点云预测预训练方法 开卷可扩展自动驾驶(OpenDriveLab) 自动驾驶新方向?ViDAR:开卷可扩展自动驾驶(OpenDriveLab)-CSDN博客 创新点 在这项工作中,本文探索了专为端到端视觉自动…...

基于大数据的二手电子产品需求分析及可视化系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码、微信小程序源码 精品专栏:…...

SpringBoot——基础配置
但是还需要删除pom.xml中的标签——模板的文件也同样操作 banner的选项——关闭 控制台 日志 banner图片的位置——还会分辨颜色 在 Java 的日志框架(如 Logback、Log4j2 等)中,logging.level.root主要用于设置根日志记录器的日志级别…...

Android OpenGLES2.0开发(三):绘制一个三角形
我们总是对陌生人太客气,而对亲密的人太苛刻 上一篇文章中,我们已经将OpenGL ES环境搭建完成。接下来我们就可以开始我们的绘图之旅了。该篇我们讲解最基本图形三角形的绘制,这是一切绘制的基础。在OpenGL ES的世界里一切图形都可以由三角形拼…...

数据清洗的重要性与方法
在数据分析和机器学习的世界中,数据清洗是一个不可或缺的步骤。 它涉及到对原始数据进行处理,以便使其适合进一步的分析和建模。 数据清洗的重要性 提高数据质量 数据质量直接影响分析结果的准确性。 脏数据(包含错误、重复、不完整的数据&a…...

Windows APK安装工具终极指南:轻松在电脑上安装Android应用
Windows APK安装工具终极指南:轻松在电脑上安装Android应用 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 您是否曾经希望在Windows电脑上直接安装Android…...

MODCAR:一种高效并发工业通信协议
什么是 MODCAR?MODCAR 是一个面向工业现场总线与以太网的并发通信协议。它的名字由两部分组成:MOD —— 致敬经典的 Modbus 协议,继承了其功能码、寄存器/位操作等易用特性。CAR —— Concurrent Access & Response(并发访问与…...

S905M芯片盒子救砖实战:8189ETV无线与NAND存储的线刷固件修复指南
1. 救砖前的准备工作 当你发现手里的辽宁移动数码视讯Q5盒子突然变砖,先别急着扔。这种采用S905M芯片的盒子其实有很高的可玩性,尤其是搭配8189ETV无线模块和NAND存储的方案,只要掌握正确方法,救砖成功率很高。我前前后后折腾过二…...

自动化测试系统开关架构与继电器选型指南
1. 自动化测试系统中的开关架构选择在自动化测试系统中,开关架构的选择直接影响着测试效率、信号完整性和系统成本。根据测试需求和被测设备(DUT)特性,我们可以将开关架构分为四种基本类型。1.1 无开关架构无开关架构是最直接的连接方式,每个…...

从零搭建AI增强型第二大脑:NotebookLM+Obsidian+Dataview三体联动,7天知识处理效率提升3.8倍
更多请点击: https://intelliparadigm.com 第一章:NotebookLM与Obsidian整合的底层逻辑与价值定位 NotebookLM 与 Obsidian 的整合并非简单插件叠加,而是基于“语义增强型知识工作流”的范式迁移。其底层逻辑根植于双引擎协同:No…...

Google Meet开启Gemini字幕后CPU飙升300%?资深SRE教你用Chrome Tracing+Gemini Profiling Dashboard精准定位瓶颈
更多请点击: https://intelliparadigm.com 第一章:Google Meet开启Gemini字幕后CPU飙升300%?资深SRE教你用Chrome TracingGemini Profiling Dashboard精准定位瓶颈 当团队在Google Meet中启用Gemini实时字幕功能后,参会终端Chrom…...

无需写代码!用 PackSoft 做数字展厅大屏
前言 做过展厅项目的朋友都懂这种痛—— 客户参观来了,讲解员打开浏览器,地址栏、书签栏、收藏夹全暴露在屏幕上,旁边还挂着一个没关的 QQ 弹窗……高端大气的数字展厅,体验瞬间拉低一个档次。 更麻烦的是:大屏全屏…...

别再死记硬背了!用GNS3/EVE-NG模拟BGP、OSPF、RIP混合组网,带你理解路由选路优先级
动态路由协议实战:用GNS3/EVE-NG解密BGP、OSPF、RIP选路逻辑 当你面对一个同时运行BGP、OSPF和RIP的复杂网络时,路由器究竟如何选择最佳路径?这个看似基础的问题,却让无数网络工程师在深夜排障时抓狂。传统教材中那些枯燥的AD值表…...

51单片机内存空间全解析:从data、xdata到far,手把手教你用Keil C51访问任意地址
51单片机内存空间全解析:从data、xdata到far,手把手教你用Keil C51访问任意地址 在嵌入式开发领域,51单片机因其经典架构和广泛的应用基础,依然是许多工程师入门的首选。然而,当开发者从简单的GPIO控制进阶到复杂的内存…...

技术创始人如何选择CEO:谦逊、互补与权力交接的艺术
1. 从技术专家到掌舵者:CEO角色转变的深层逻辑 在EDA(电子设计自动化)和半导体设计这个高度技术驱动的领域里,创业公司的故事每天都在上演。你可能会在DAC(设计自动化大会)上看到上百家初创公司,…...