订阅ROS2中相机的相关话题并保存RGB、深度和点云图
系统:Ubuntu22.04
ROS2版本:ROS2 humble
1.订阅ROS2中相机的相关话题并保存RGB图、深度图和点云图
ros2 topic list/stellar_1/rgb/image_raw
/camera/depth/image_raw
/stellar_1/points2
CMakeLists.txt
cmake_minimum_required(VERSION 3.15)
project(bag_to_image)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(OpenCV REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)add_executable(bag_to_image_node src/bag_to_image_node.cpp)# ROS2中指定节点或库的依赖项
ament_target_dependencies(bag_to_image_node rclcpp) # 核心C++客户端库,旨在简化开发和实现机器人应用程序
ament_target_dependencies(bag_to_image_node sensor_msgs) # 消息包,提供了一系列标准化的消息类型,用于传输来自各种传感器的数据
ament_target_dependencies(bag_to_image_node cv_bridge) # 用于连接ROS与OpenCV,提供在ROS消息格式与OpenCV图像格式之间的转换
ament_target_dependencies(bag_to_image_node OpenCV)install(TARGETSbag_to_image_nodeDESTINATION lib/${PROJECT_NAME})if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)set(ament_cmake_copyright_FOUND TRUE)set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()
bag_to_image_node.cpp
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/image.hpp>
#include <sensor_msgs/msg/point_cloud2.hpp>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <filesystem>
#include <fstream>
#include <queue>class ImageSaver : public rclcpp::Node
{
public:ImageSaver() : Node("image_saver"), frame_count(0){// 新建RGB图像、深度图像、点云图像文件夹std::filesystem::create_directories("rgb_images");std::filesystem::create_directories("depth_images");std::filesystem::create_directories("point_clouds");// 订阅话题 rgb_subscriber = this->create_subscription<sensor_msgs::msg::Image>("/stellar_1/rgb/image_raw",10,std::bind(&ImageSaver::rgb_callback, this, std::placeholders::_1));depth_subscriber = this->create_subscription<sensor_msgs::msg::Image>("/camera/depth/image_raw",10,std::bind(&ImageSaver::depth_callback, this, std::placeholders::_1));point_cloud_subscriber = this->create_subscription<sensor_msgs::msg::PointCloud2>("/stellar_1/points2",10,std::bind(&ImageSaver::point_cloud_callback, this, std::placeholders::_1));}private:std::queue<sensor_msgs::msg::Image::SharedPtr> rgb_queue;std::queue<sensor_msgs::msg::Image::SharedPtr> depth_queue;void rgb_callback(const sensor_msgs::msg::Image::SharedPtr msg){rgb_queue.push(msg);process_frames();}void depth_callback(const sensor_msgs::msg::Image::SharedPtr msg){depth_queue.push(msg);process_frames();}void point_cloud_callback(const sensor_msgs::msg::PointCloud2::SharedPtr msg){// 保存点云图为.bin格式std::ofstream outfile("point_clouds/frame_" + std::to_string(frame_count) + ".bin", std::ios::binary);outfile.write(reinterpret_cast<const char *>(msg->data.data()), msg->data.size());outfile.close();frame_count++;process_frames(); // Check if we can process frames after saving point cloud}void process_frames(){while (!rgb_queue.empty() && !depth_queue.empty() && frame_count > 0) {auto rgb_msg = rgb_queue.front();auto depth_msg = depth_queue.front();// 计算时间戳差值int64_t rgb_time = rgb_msg->header.stamp.sec * 1e9 + rgb_msg->header.stamp.nanosec;int64_t depth_time = depth_msg->header.stamp.sec * 1e9 + depth_msg->header.stamp.nanosec;// 检查时间戳是否足够接近if (std::abs(rgb_time - depth_time) < 100000000) { // 100 mscv_bridge::CvImagePtr cv_rgb_ptr = cv_bridge::toCvCopy(rgb_msg, sensor_msgs::image_encodings::BGR8);cv::imwrite("rgb_images/frame_" + std::to_string(frame_count) + ".png", cv_rgb_ptr->image);// TYPE_32FC1:// 32F:表示每个元素是 32 位(4 字节)浮点数(float)。// C1:表示单通道(Channel 1),即每个像素只有一个值。常用于灰度图像或单通道浮点数据。// TYPE_16UC1:// 16U:表示每个元素是 16 位(2 字节)无符号整数(unsigned int)。// C1:同样表示单通道,即每个像素只有一个值。常用于灰度图像或单通道整数数据,通常用于深度图等场景。cv_bridge::CvImagePtr cv_depth_ptr =cv_bridge::toCvCopy(depth_msg, sensor_msgs::image_encodings::TYPE_16UC1);cv::imwrite("depth_images/frame_" + std::to_string(frame_count) + ".png", cv_depth_ptr->image);rgb_queue.pop();depth_queue.pop();} else if (rgb_time < depth_time) {rgb_queue.pop(); // 移除旧的 RGB 消息} else {depth_queue.pop(); // 移除旧的深度消息}}}rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr rgb_subscriber;rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr depth_subscriber;rclcpp::Subscription<sensor_msgs::msg::PointCloud2>::SharedPtr point_cloud_subscriber;int frame_count;
};int main(int argc, char **argv)
{std::cout << "bag to image node start.." << std::endl;rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<ImageSaver>());rclcpp::shutdown();return 0;
}
运行:
source install/setup.bash
ros2 run bag_to_image bag_to_image_node

2.将点云图.bin格式转换为.pcd格式
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <thread>// 将点云图.bin转换为.pcd
void convert_bin_to_pcd(const std::string &bin_file, const std::string &pcd_file)
{// 读取二进制点云数据std::ifstream infile(bin_file, std::ios::binary);if (!infile) {std::cerr << "Error opening binary file!" << std::endl;return;}pcl::PointCloud<pcl::PointXYZ> cloud;pcl::PointXYZ point;// 假设每个点包含x, y, z坐标while (infile.read(reinterpret_cast<char *>(&point), sizeof(pcl::PointXYZ))) {cloud.points.push_back(point);}cloud.width = cloud.points.size();cloud.height = 1; // 单个点云infile.close();// 保存为 PCD 文件pcl::io::savePCDFileASCII(pcd_file, cloud);std::cout << "Converted to PCD file: " << pcd_file << std::endl;
}int main(int argc, char **argv)
{convert_bin_to_pcd("frame_0.bin", "frame_0.pcd");return 0;
}
相关文章:
订阅ROS2中相机的相关话题并保存RGB、深度和点云图
系统:Ubuntu22.04 ROS2版本:ROS2 humble 1.订阅ROS2中相机的相关话题并保存RGB图、深度图和点云图 ros2 topic list/stellar_1/rgb/image_raw /camera/depth/image_raw /stellar_1/points2CMakeLists.txt cmake_minimum_required(VERSION 3.15) projec…...

Open WebUI | 自托管的类 ChatGPT 网站
Open WebUI 是一个扩展性强、功能丰富且用户友好的自托管 WebUI,旨在完全离线操作。它支持各种 LLM 服务,包括 Ollama 和 OpenAI 兼容的 API。该项目在 GitHub 上已有 38k 星,非常受欢迎。 功能介绍 废话不多说,上图!…...

【Python】Python知识总结浅析
Python是一种高级编程语言,由Guido van Rossum于1991年首次发布。它以简洁的语法和强大的功能著称,适用于多种应用场景,包括Web开发、数据分析、人工智能、自动化脚本等。 易于学习和使用:Python的语法简洁明了,适合初…...

c#代码介绍23种设计模式_20策略者模式
目录 1、策略模式的定义 2、策略模式的结构 3、涉及到三个角色: 4、策略者模式在.NET中应用 5、策略者模式的适用场景 6、策略者模式的优缺点 7、实现思路 在现实生活中,策略模式的例子也非常常见,例如,中国的所得税,分为企业所得税、外商投资企业或外商企业所得税…...

FPGA-UART串口接收模块的理解
UART串口接收模块 背景 在之前就有写过关于串口模块的文章——《串口RS232的学习》。工作后很多项目都会用到串口模块,又来重新理解一下FPGA串口接收的代码思路。 关于串口相关的参数,以及在文章《串口RS232的学习》中已有详细的描述,这里就…...

复习HTML(基础)
目录 HTML含义 HTML作用 HTML的常用元素 元素的特点 元素的分类 1 是否嵌套关系 2 是否独占一行 块元素:独占一行 行内元素:共享一行 行内元素与块级元素的转换 3是否有结束标签 常用标签 1 标题标签:有六级 我们用h1 ~h6 表…...

Linux聊天集群开发之环境准备
一.windows下远程操作Linux 第一步:在Linux终端下配置openssh,输入netstate -tanp,查看ssh服务是否启动,默认端口22.。 注:如果openssh服务,则需下载。输入命令ps -e|grep ssh, 查看如否配有, ssh-agent …...

can 总线入门———can简介硬件电路
文章目录 0. 前言1. CAN简介2. 主流通讯协议对比3. CAN 硬件电路4. CAN 电平标准5. CAN 收发器 0. 前言 博客内容来自B站上CAN总线入门教程视频讲解,博客中的插图和内容均为视频中的内容。视频链接 CAN总线入门教程 1. CAN简介 先来看看一它名字的意思,…...

【重学 MySQL】六十、空间类型
【重学 MySQL】六十、空间类型 空间数据类型的分类空间数据类型的属性空间数据的表示方式空间数据的操作应用场景 在MySQL中,空间类型(Spatial Types)主要用于支持地理特征的生成、存储和分析。这些地理特征可以表示世界上具有位置的任何东西…...

python实现DES算法
DES算法 一、算法介绍1.1 背景1.2 原理1.3 基本功能函数1.3.1 初始置换函数 I P IP IP1.3.2 f f f 轮函数1.3.3 逆初始置换函数 I P − 1 IP^{-1} IP−1 1.4 子密钥的生成 二、代码实现2.1 子密钥生成实现2.2 DES加解密实现2.3 完整代码 三、演示效果 一、算法介绍 1.1 背景…...
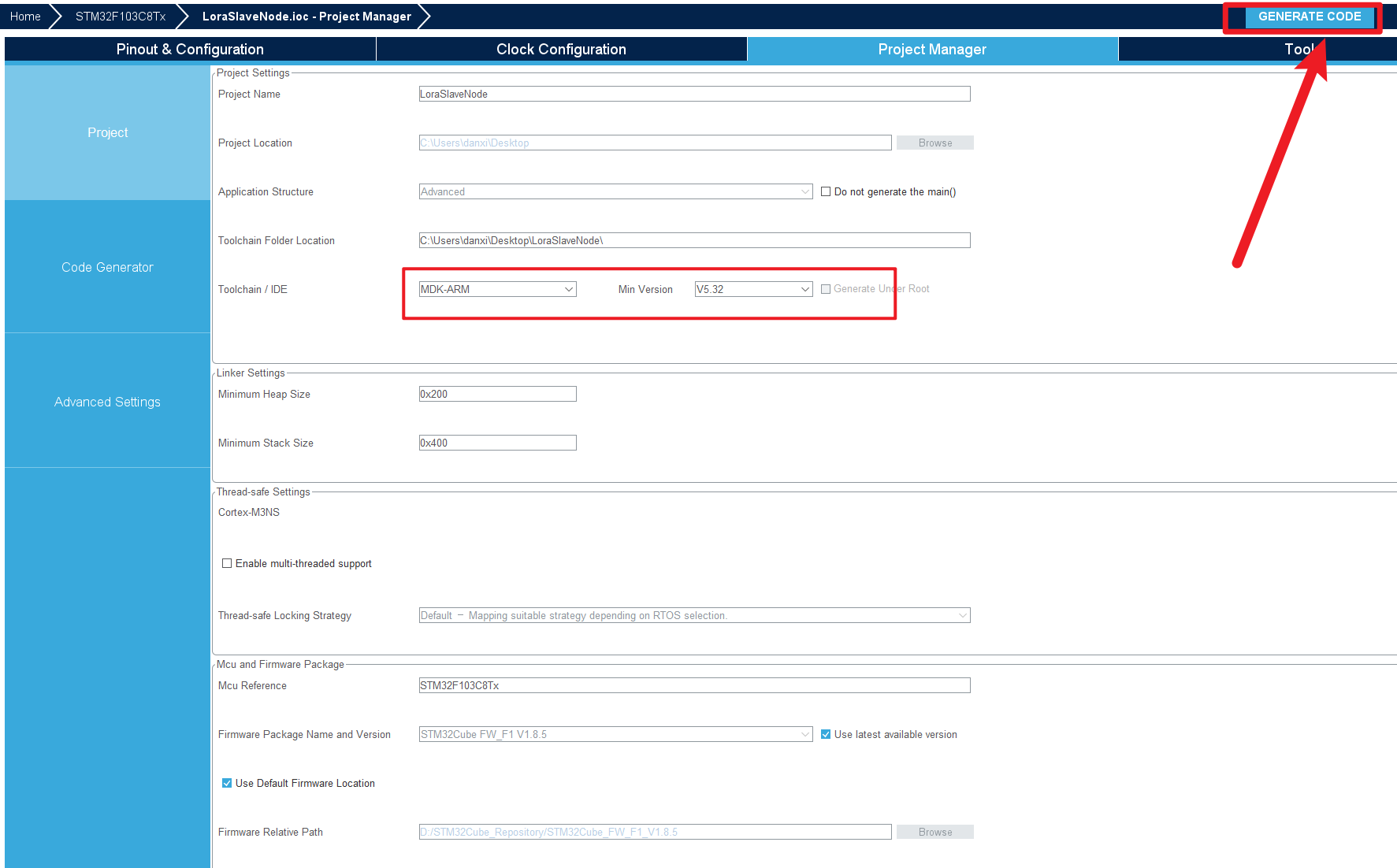
基于LORA的一主多从监测系统_框架搭建
第一节、框架搭建 打开CubeMAX,选择好芯片,进行基础配置 第一步、先配置时钟源 第二步、配置SYS选项 配置debug口以及计数器源,我这里选择TIM1 第三步、选择I2C接口 配置如下即可,默认配置不用改 第四步、串口选择 我们这里使…...

优化理论及应用精解【25】
文章目录 优化学习率调度1. 阶梯衰减(Step Decay)2. 余弦退火(Cosine Annealing)3. 多项式衰减(Polynomial Decay)4. 指数衰减(Exponential Decay)总结 梯度弥散效应 参考文献 优化 …...
贝锐蒲公英网盘首发,秒建私有云,高速远程访问
虽然公共网盘带来了不少便利,但是大家对隐私泄露和重要数据泄密的担忧也随之增加。如果想要确保数据安全,自建私有云似乎是一条出路,然而面对搭建私有云的复杂步骤,许多人感到力不从心,NAS设备的成本也往往让人望而却步…...

[ 蓝桥 ·算法双周赛 ] 第 19 场 小白入门赛
🔥博客介绍: EvLast 🎥系列专栏: <<数据结构与算法>> << 算法入门>> << C项目>> 🎥 当前专栏: << 算法入门>> 专题 : 帮助小白快速入门算法竞赛 👍…...

HTML+CSS基础 第二季课堂笔记
一、列表 列表都不是单打独斗的,通常都是一组标签组成 1 无序列表 作用:定义一个没有顺序的列表结构 由两个标签组成,ul(容器级标签),li(容器级) ul:英文ulordered …...

【Easy RL】Easy RL蘑菇书全书学习笔记
【Easy RL】Easy RL蘑菇书全书学习笔记 第一章 强化学习基础1.1 强化学习概述监督学习强化学习与监督学习的不同之处二者的区别总结强化学习的特征强化学习的优越性预演(rollout)和 轨迹(trajectory)的概念端到端的概念深度强化学…...
)
JavaWeb(二)
Servlet开发技术 [外链图片转存中…(img-Cnu8X2V4-1728026684827)] 简述Servlet的创建过程? package servlet; import java.io.IOException; import java.io.PrintWriter; import javax.servlet.ServletException; import javax.servlet.annotation.WebServlet; …...

【C++】--类和对象(2)
👌个人主页: 起名字真南 👆个人专栏:【数据结构初阶】 【C语言】 【C】 目录 1 类的默认成员函数2 构造函数3 析构函数4 拷贝构造5 赋值运算符重载5.1 运算符重载5.2 赋值运算符的重载 1 类的默认成员函数 默认成员函数就是用户没有显示实现,…...

最新BurpSuite2024.9专业中英文开箱即用版下载
1、工具介绍 本版本更新介绍 此版本对 Burp Intruder 进行了重大改进,包括自定义 Bambda HTTP 匹配和替换规则以及对扫描 SOAP 端点的支持。我们还进行了其他改进和错误修复。 Burp Intruder 的精简布局我们对 Burp Intruder 进行了重大升级。现在,您可…...

C++ 观察者模式
观察者模式(Observer Pattern)是一种行为设计模式,用于在对象之间建立一对多的依赖关系,当一个对象的状态发生变化时,它的所有依赖对象都会得到通知并自动更新。 在观察者模式中,主题和观察者之间是松耦合…...

Rekall:基于时空查询的视频内容智能检索开源框架
1. 项目概述:Rekall,一个面向视频时空查询的开源利器 如果你曾经尝试过从一段长视频里,精准地找出“那个穿红色衣服的人从画面左侧走到右侧的片段”,或者想快速定位“所有出现这只特定宠物狗的镜头”,你就会知道这有多…...

Cursor与Figma通过MCP协议实现AI辅助设计与开发同步
1. 项目概述:当代码编辑器与设计工具“开口说话”最近在开发者社区里,一个名为“cursor-talk-to-figma-mcp”的项目引起了我的注意。这个由开发者“hamadoun1760”开源的仓库,名字直译过来就是“Cursor与Figma对话的MCP”。乍一看,…...

ITK-SNAP医学图像分割:破解三维解剖结构提取的工程难题
ITK-SNAP医学图像分割:破解三维解剖结构提取的工程难题 【免费下载链接】itksnap ITK-SNAP medical image segmentation tool 项目地址: https://gitcode.com/gh_mirrors/it/itksnap 当我们面对复杂的脑部MRI数据、肿瘤CT扫描或心血管影像时,最大…...

多数人支持!微软或把 Xbox 重新品牌化为 XBOX,回归最初形式
Xbox 品牌重塑:从民意调查到账号更名微软 Xbox 首席执行官阿莎夏尔马在 X(原推特)上发起民意调查,询问粉丝微软应使用 Xbox 还是 XBOX,结果多数人支持 XBOX,随后公司将其 X 账号更名。不过,Xbox…...

MIMO-OFDM在ISAC系统中的同步技术与性能优化
1. MIMO-OFDM技术在ISAC系统中的核心价值 毫米波频段下的集成感知与通信(ISAC)系统正成为6G网络的关键使能技术。作为其物理层核心,MIMO-OFDM架构通过正交子载波和空间复用技术,同时实现了高速数据传输与高精度环境感知。这种双功能集成并非简单叠加&…...

手工打造柔性LED眼罩:从SMD焊接入门到可穿戴电路实践
1. 项目概述:从零打造你的赛博格之眼如果你和我一样,对《银翼杀手》里那些闪烁着冷光的义眼,或是赛博朋克美学中标志性的发光装饰着迷,那么亲手制作一个属于自己的LED眼罩,绝对是一次令人兴奋的旅程。这不仅仅是一个酷…...

书成紫微动,律定凤凰驯:《第一大道》破的是资本,《凰标》立的是民心
书成紫微动,律定凤凰驯。 ——千年古谶,道破治乱循环: 乱世由乱象所积,盛世由人心所筑。一、困局:资本驯化文艺的三重锁链锁链症状结果垄断话语权曝光渠道、评价标准、出圈资源尽归资本民间佳作被算法活埋绑架审美流水…...

LabVIEW生产者消费者模式:队列解耦与多任务架构实战
1. 项目概述:从“单线程”到“流水线”的思维跃迁如果你用过LabVIEW,大概率写过那种“一个While循环包打天下”的程序。按钮事件、数据采集、逻辑处理、界面更新,全都塞在一个循环里,顺序执行。程序简单时还好,一旦任务…...

T2080工控主板开发实战:从核心特性到系统部署全解析
1. 项目概述:从一块“硬核”主板说起 最近在整理手头的嵌入式项目资料,翻出了一块来自东大金智科技的T2080工控主板。这块板子在我经手过的众多嵌入式平台里,算是相当有“分量”的一位——不是指物理重量,而是其内在的“硬核”实力…...

骨传导耳机品牌Mojawa完成数千万元A+轮融资,发力AI运动智能平台
硬氪获悉,苏州索迩电子技术有限公司近日完成数千万元人民币的A轮融资,由正海资本领投。资金将用于拓展海外线下渠道和推进产品AI智能化研发。骨传导耳机市场增长显著在音频产品市场,骨传导耳机因无线和开耳式聆听技术需求增加而显著增长。202…...