自动驾驶 车道检测实用算法
自动驾驶 | 车道检测实用算法
车道识别是自动驾驶领域的一个重要问题,今天介绍一个利用摄像头图像进行车道识别的实用算法。该算法利用了OpenCV库和Udacity自动驾驶汽车数据库的相关内容。
该算法包含以下步骤:
-
摄像头校准,以移除镜头畸变(Lens distortion)的影响
-
图像前处理,用于识别车道线
-
道路视角变换(Perspective transform)
-
车道线检测
-
车辆定位和车道半径计算
01
摄像头校准
摄像头输出的视频可以看做一系列图像的时间序列。镜头的结构特性造成利用针孔摄像机拍摄的图像容易发生径向畸变,导致根据物体与光轴的距离而导致不一致的放大。
以下图片展示了两种典型的径向偏差。

为了 正确的识别图像中的车道,首先需要消除图像中的径向偏差。计算机视觉专家们找到了一种有效的方式来修正径向偏差:首先将图像转换成棋盘模型,然后校正摄像头,使获得的图像中白色和黑色格子达到相同规尺度。
为了修正失真效应,需要识别棋盘的中心并利用期望的棋盘尺度来计算失真系数,并用其来消除图像的径向失真。

在上图中,最左边的图像显示了原始的失真图像,最右侧的图可以看出图像顶部的角度扭曲,中间的图像是经过摄像头校准后的未失真图像。
OpenCV的findChessBoardCorners和calibrateCamera函数可以用来实现以上的摄像头校准过程。
校准完摄像头后,我们用真实的汽车摄像头图像来验证下效果,结果如下。

02
图像预处理
解决了摄像头图像失真问题后,我们继续探索检测车道的算法。在计算机视觉领域,分离和检测对象的一种常用方法是使用颜色变换和梯度来生成一个具有过滤阈值的二值化图像。
对于颜色变换,我们尝试了HSL、LAB和LUA三种颜色空间,以找出哪一种最适合于过滤在道路上的车道线的像素。
HSL: 通过对色相(H)、饱和度(S)、明度(L)三个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色的
LAB: 由亮度(L)和有关色彩的A, B三个要素组成。L表示亮度(Luminosity),A表示从洋红色至绿色的范围,B表示从黄色至蓝色的范围
LUV: 由CIE XYZ空间经简单变换得到,具视觉统一性。L表示物体亮度,U和V是色度
经过试验,我们发现LAB的B道和LUV的L通道是识别车道线的最佳组合。
接下来,我们试验了Sobel梯度滤波器。图像梯度度量了颜色变化的方向强度。Sobel是一种利用高斯平滑和微分运算来降低噪声影响的梯度滤波器。

03
视角变换
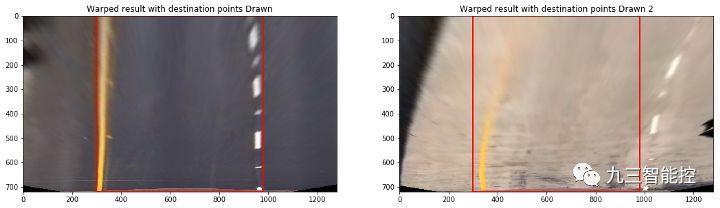
车道检测的难点在于准确获得车道线的方向以及角度。在摄像头的默认视角下,远离摄像机的物体显得更小,同时车道线在远离汽车的方向逐渐相交,这和实际情况是不符的。解决这种视点扭曲的一种方法是改变图像的视角,比如可以从上往下看(鸟瞰图)。
OpenCV提供了 getPerspectiveTransform
和 warpPerspective函数,可用于进行图像的视角变换。首先,我们在图像中选择想要变换的区域,在下图中,我们选择了汽车前面的车道线部分。

接下来,选择代表目标空间的点集,在本例中,任何矩形内的点集都可以。我们可以使用warpPerspective函数将选定区域变换到我们选择的视角中。
下图显示了两条不同路段的车道线进行视角变换后的结果。
04
车道检测
下面,我们正式开始进行车道检测。在前面的各步骤中,我们进行了图像的二元阈值化和视角变换,最终获得一个黑白图像,其中白色的像素代表我们试图检测的车道线的部分。
接下来,我们需要找到一个最佳起始点来寻找属于左车道线的像素和属于右车道线的像素。一种有效的方法是生成图像中车道线像素的直方图。直方图应该有两个尖峰,各代表一条车道线,左边的尖峰是左边的车道线,右边的尖峰是右边的车道线。

然后将两个峰值的位置作为起始点来搜索属于每条车道线的像素。我们采用了滑动窗口搜索技术,它从底部开始,迭代地扫描到图像的顶部,并将检测到的像素添加到列表中。如果在一个窗口中检测到足够数量的像素,那么下一个窗口将以它们的平均位置为中心,这样我们就沿着像素的路径寻遍整个图像。
在我们检测到每个车道线的像素之后,我们就可以通过这些点来拟合一个多项式,从而产生一条平滑曲线,从而实现车道线的最佳近似。
下面的图像展示了滑动窗口技术的作用,多项式曲线通过检测到的车道线像素拟合获得(红色为左车道像素,蓝色为右车道像素)。

下面是滑动窗口搜索技术的另一个视图,高亮显示并填充搜索区域:

05
车辆/车道线位置
最后,利用两个检测到的车道线的位置,并假设摄像头位于图像的中心位置,可以计算出汽车相对于车道的位置。根据图像的分辨率,能够进行从像素到米的换算。
此外,利用尺度测量,我们还可以通过拟合一个新的多项式到物理空间来计算车道线的曲率,然后计算曲率半径。这条线的曲率半径就是这两个半径的平均值,下图显示了两条车道线的曲线半径和中心偏移量(图像中不可见)。

06
结果
以上介绍了自动驾驶中进行车道线检测的实用算法,我们通过一个多边形投影区域来显示检测结果,可以看到检测结果与实际非常吻合。

相关文章:
自动驾驶 车道检测实用算法
自动驾驶 | 车道检测实用算法 车道识别是自动驾驶领域的一个重要问题,今天介绍一个利用摄像头图像进行车道识别的实用算法。该算法利用了OpenCV库和Udacity自动驾驶汽车数据库的相关内容。 该算法包含以下步骤: 摄像头校准,以移除镜头畸变&…...

22.第二阶段x86游戏实战2-背包遍历REP指令详解
免责声明:内容仅供学习参考,请合法利用知识,禁止进行违法犯罪活动! 本次游戏没法给 内容参考于:微尘网络安全 本人写的内容纯属胡编乱造,全都是合成造假,仅仅只是为了娱乐,请不要…...

java 的三种IO模型(BIO、NIO、AIO)
java 的三种IO模型(BIO、NIO、AIO) 一、BIO 阻塞式 IO(Blocking IO)1.1、BIO 工作机制1.2、BIO 实现单发单收1.3、BIO 实现多发多收1.4、BIO 实现客户端服务端多对一1.5、BIO 模式下的端口转发思想 二、NIO 同步非阻塞式 IO&#…...

低级语言和高级语言、大小写敏感、静态语言和动态语言、链接
低级语言和高级语言 一般而言,更接近硬件的语言被称为低级语言,反之,更远离硬件被称为高级语言。C语言既有低级语言的特点,又有高级语言的特点,又被称为系统语言。Java/Python一般被称为高级语言。 大小写敏感 DOS/Win…...

P3197 [HNOI2008] 越狱
题目传送门 题面 [HNOI2008] 越狱 题目描述 监狱有 n n n 个房间,每个房间关押一个犯人,有 m m m 种宗教,每个犯人会信仰其中一种。如果相邻房间的犯人的宗教相同,就可能发生越狱,求有多少种状态可能发生越狱。 …...
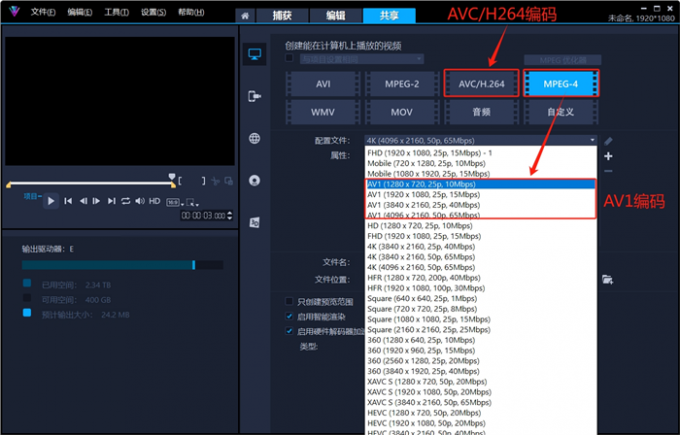
会声会影导出视频mp4格式哪个最高清,会声会影输出格式哪个清晰
调高分辨率后,mp4视频还是不清晰。哪怕全部使用4K级素材,仍然剪不出理想中的高画质作品。不是你的操作有问题,而是剪辑软件没选对。Corel公司拥有全球顶尖的图像处理技术,该公司研发的会声会影视频剪辑软件,在过去的20…...

Linux:进程调度算法和进程地址空间
✨✨✨学习的道路很枯燥,希望我们能并肩走下来! 文章目录 目录 文章目录 前言 一 进程调度算法 1.1 进程队列数据结构 1.2 优先级 编辑 1.3 活动队列 编辑 1.4 过期队列 1.5 active指针和expired指针 1.6 进程连接 二 进程地址空间 2.1 …...

TCP ---滑动窗口以及拥塞窗口
序言 在上一篇文章中我们介绍了 TCP 中的协议段格式,以及保证其可靠传输的重传机制,着重介绍了三次握手建立连接,四次挥手断开连接的过程(👉点击查看)。 这只是 TCP 保证通信可信策略的一部分,现在让我们继续深入吧&…...

第十二章--- fixed 和 setprecision 函数、round 函数、进制转换及底层逻辑
1. 保留几位小数 在C中,如果你想要控制输出的小数点后的位数,可以使用<iomanip>头文件提供的fixed和setprecision函数。这里的fixed用于设置浮点数的输出格式为定点表示法,而setprecision(n)则用来指定小数点后保留的位数。具体用法如…...

ASP.NetCore---I18n(internationalization)多语言版本的应用
文章目录 0.实现的效果如下1.创建新项目I18nBaseDemo2.添加页面中的下拉框3.在HomeController中添加ChangeLanguage方法4.在Progress.cs 文件中添加如下代码:5. 在progress.cs中添加code6.添加Resource资源文件7.在页面中引用i18n的变量8. 重启项目,应该…...

vue3 环境配置vue-i8n国际化
一.依赖和插件的安装 主要是vue-i18n和 vscode的自动化插件i18n Ally https://vue-i18n.intlify.dev/ npm install vue-i18n10 pnpm add vue-i18n10 yarn add vue-i18n10 vscode在应用商城中搜索i18n Ally:如图 二.实操 安装完以后在对应项目中的跟package.jso…...

2024 uniapp入门教程 01:含有vue3基础 我的第一个uniapp页面
uni-app官网uni-app,uniCloud,serverless,快速体验,看视频,10分钟了解uni-app,为什么要选择uni-app?,功能框架图,一套代码,运行到多个平台https://uniapp.dcloud.net.cn/ 准备工作:HBuilder X 软件 HBuilder X 官网下载…...

CentOS 7文件系统
从centos7开始,默认的文件系统从ext4变成了XFS。随着虚拟化的应用越来越广泛,作为虚拟化磁盘来源的大文件(单个文件几GB级别)越来越常见。 1.XFS组成部分: XFS文件系统在数据的分布上主要划分为三部分:数据…...
)
vue源码解析(源码解析学习大纲)
文章目录 Vue源码解析入手方向大纲1.核心概念1-1.响应式系统1-2. 组件1-3. 虚拟DOM1-4. 指令1-5. 生命周期钩子 2.虚拟DOM2-1. 概念2-2. 工作流程2-3. 示例2-4.总结 3.组件系统3-1. 组件的定义3-2. 组件的创建3-3. 组件的模板3-4. 生命周期3-5. 事件处理3-6. 插槽(S…...

工行企业网银U盾展期后有两个证书问题的解决方法
工行企业网银U盾证书快到期后,可以自助展期,流程可以根据企业网银提示页面操作。操作后,可能存在两个新旧两个证书并存的情况,致使网银转账等操作失败,如图: 其原因是新证书生成后,旧证书没有删…...

《Linux从小白到高手》理论篇:文件权限控制及文件操作相关的命令
List item 本篇介绍Linux文件权限控制及文件操作相关的命令,看完本文,有关Linux文件权限控制及文件操作相关的常用命令你就掌握了99%了。 文件权限 在介绍文件权限之前先来复习下Linux的文件类型,始终记住那句话:Linux系统下&a…...

前端框架React的详细的学习方法和过程
学习React作为前端架构的一部分,是一个系统且逐步深入的过程。以下是一个详细的学习方法和过程,可以帮助你有效地掌握React: 1. 理解React的基础知识 首先,你需要了解React的基本概念,包括它是什么、为什么使用它以及…...

linux中缓存,在kafka上应用总结
linux中的缓存 页缓存 pagecatch(读缓存用于提供快速读)块缓存(用于提供其他设备快速写)当对读缓存读的时候,修改了读的数据,页缓存就会被标记为脏数据,等到写的时候它会向块缓存同步数据&…...

前端练习小项目 —— 让图片变得更 “色”
前言:相信读者在学习完了HTML、CSS和JavaScript之后已经想要迫不及待的想找一个小型的项目来练练手,那么这篇文章就正好能满足你的 “需求”。 ✨✨✨这里是秋刀鱼不做梦的BLOG ✨✨✨想要了解更多内容可以访问我的主页秋刀鱼不做梦-CSDN博客 在开始学习…...

时间卷积网络(TCN)原理+代码详解
目录 一、TCN原理1.1 因果卷积(Causal Convolution)1.2 扩张卷积(Dilated Convolution) 二、代码实现2.1 Chomp1d 模块2.2 TemporalBlock 模块2.3 TemporalConvNet 模块2.4 完整代码示例 参考文献 在理解 TCN 的原理之前ÿ…...

主动学习在可修复硬件系统可靠性分析中的应用
1. 可修复硬件系统可靠性分析的挑战与机遇 在航空航天、医疗设备和军事装备等关键领域,硬件系统的可靠性直接关系到人员安全和任务成败。传统可靠性分析方法面临三大核心挑战: 数据收集成本高 :全系统测试需要拆卸设备,每次维护…...
)
告别手动抢红包!用Kotlin写一个Android微信红包监听助手(附完整代码)
用Kotlin构建Android微信红包自动化工具:从原理到避坑指南 春节聚会时,你是否曾因低头抢红包错过亲友的精彩对话?工作群里的手气红包总在分神时一闪而过?作为一名Android开发者,其实可以用技术优雅解决这些烦恼。本文…...

面向高校的基于算法的发明专利申请写作方法
发明专利作为国家和高校认可的成果形式之一,其申请和授权一直受到教师和学生们的高度重视;基于算法的发明专利作为发明专利的重要分支,每年都有大量的算法专利被授权或者拒绝。虽然高校的教师对论文写作非常熟悉,但是发明专利的写…...

PlantUML Editor:5分钟学会用代码绘制专业UML图的终极工具
PlantUML Editor:5分钟学会用代码绘制专业UML图的终极工具 【免费下载链接】plantuml-editor PlantUML online demo client 项目地址: https://gitcode.com/gh_mirrors/pl/plantuml-editor 还在为复杂的UML图表绘制而烦恼吗?PlantUML Editor是一款…...

打破偏见!Java做AI不是不行,是2026年最被低估的红利
长久以来,行业里一直有个固有认知:AI是Python的主场,Java做AI笨重、生态弱、落地难。很多Java企业团队看着AI浪潮席卷各行各业,要么束手观望,要么被迫切换Python技术栈重构系统,不仅成本高昂,还…...

在职场上,别人对你的态度,都是你允许的:“他为什么敢这样对我?”“他为什么不怕得罪我?”“我有什么好怕的?”
当有人在公司凶你时:别问"他为什么凶我",要问"他为什么敢" 目录 当有人在公司凶你时:别问"他为什么凶我",要问"他为什么敢" 别人敢在公司得罪你,是因为他早已算清了这笔账 他不怕得罪你,说明在他眼里你"没有威胁性" …...

AI驱动的代码安全审计工具OpenClaw:原理、部署与实战调优
1. 项目概述:当AI成为代码审计的“利爪” 最近在安全圈和开源社区里,一个名为“OpenClaw”的项目引起了我的注意。它的全称是 zast-ai/openclaw-security-audit ,从名字就能嗅到一股“技术极客”的味道——“zast-ai”暗示着AI驱动…...

京东自动抢购工具完整指南:5分钟学会Python自动化购物
京东自动抢购工具完整指南:5分钟学会Python自动化购物 【免费下载链接】autobuy-jd 使用python语言的京东平台抢购脚本 项目地址: https://gitcode.com/gh_mirrors/au/autobuy-jd 还在为京东秒杀抢不到心仪商品而烦恼吗?想要在促销活动中轻松抢购…...

飞凌T507核心板开发实战:开机LOGO、电阻屏校准与双屏异显配置详解
1. 项目概述与核心板简介最近在做一个车载信息娱乐终端的项目,硬件平台选用了飞凌嵌入式的FETT507-C核心板。这块板子基于全志T507这颗四核车规级处理器,Cortex-A53架构,主频1.5GHz,集成了G31 GPU,标配2GB DDR3L内存和…...

为什么你的民族志写作总卡在“分析乏力”?NotebookLM三步穿透文本深层文化逻辑
更多请点击: https://intelliparadigm.com 第一章:为什么你的民族志写作总卡在“分析乏力”?NotebookLM三步穿透文本深层文化逻辑 民族志写作常陷入“描述丰富、解释单薄”的困境——田野笔记堆叠如山,却难以提炼出文化实践背后的…...