舵机驱动详解(模拟/数字 STM32)
目录
一、介绍
二、模块原理
1.舵机驱动原理
2.引脚描述
三、程序设计
main.c文件
servo.h文件
servo.c文件
四、实验效果
五、资料获取
项目分享
一、介绍
舵机(Servo)是在程序的控制下,在一定范围内连续改变输出轴角度并保持的电机系统。即舵机只支持在一定角度内转动,无法像普通直流电机按圈转;其主要控制物体的转动并保持(机器人关节、转向机构)。适用于位置角度经常变化的场合。可以作为理想的电机驱动器件。

以下MG90S舵机模块的参数:
| 型号 | MG90S/MG90 |
| 使用电压 | 4.8V |
| 反应速度 | 0.11s(4.8V) |
| 转动角度 | 180度(左90,右90) |
| 使用温度 | 0~55℃ |
| 工作扭矩 | 2.0kg |
| 产品重量 | 13.6g |
哔哩哔哩视频链接:
舵机驱动详解(模拟/数字 STM32)
(资料分享见文末)
二、模块原理
1.舵机驱动原理

舵机的控制一般需要一个20MS左右的时基脉冲,该脉冲的高电平部分一般为0.5MS-2.5MS范围内的角度控制脉冲部分总间隔为2MS。以180度角度为例,那么对应的控制关系是这样的

2.引脚描述
| 引脚名称 | 描述 |
| VCC | 供给电压5V |
| GND | 地线 |
| S | 信号线 |
三、程序设计
使用STM32F103C8T6通过按键控制舵机旋转指定角度。
| SERVO | PA2 |
| KEY | PB1 |
| OLED_SCL | PB11 |
| OLED_SDA | PB10 |
main.c文件
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
#include "delay.h"
#include "oled.h"
#include "servo.h"
#include "key.h"/*****************辰哥单片机设计******************STM32* 项目 : 舵机驱动实验 * 版本 : V1.0* 日期 : 2024.9.27* MCU : STM32F103C8T6* 接口 : 参看servo.h * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥 **********************BEGIN***********************/int key = 0;
float Angle; //定义角度变量int main(void)
{ SystemInit();//配置系统时钟为72M delay_init(72);LED_Init();LED_On();Servo_Init();USART1_Config();//串口初始化Key_Init();OLED_Init();printf("Start \n");delay_ms(1000);OLED_Clear();//显示“舵机角度:”OLED_ShowChinese(0,0,0,16,1);OLED_ShowChinese(16,0,1,16,1);OLED_ShowChinese(32,0,2,16,1);OLED_ShowChinese(48,0,3,16,1);OLED_ShowChar(64,0,':',16,1);while (1){key = Key_GetData();if(key){Angle += 30; //角度变量自增30if (Angle > 180) //角度变量超过180后{Angle = 0; //角度变量归零}}Servo_SetAngle(Angle); //设置舵机的角度为角度变量OLED_ShowNum(50, 24, Angle, 3,16,1); //OLED显示角度变量}
}servo.h文件
#ifndef __SERVO_H
#define __SERVO_H
#include "stm32f10x.h"
#include "delay.h"
#include "sys.h"/*****************辰哥单片机设计******************STM32* 文件 : 舵机驱动驱动h文件 * 版本 : V1.0* 日期 : 2024.9.27* MCU : STM32F103C8T6* 接口 : 见代码 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥**********************BEGIN***********************//***************根据自己需求更改****************/
// SERVO舵机 GPIO宏定义#define SERVO_CLK RCC_APB2Periph_GPIOA#define SERVO_GPIO_PIN GPIO_Pin_2
#define SERVO_GPIO_PORT GPIOA/*********************END**********************/void Servo_Init(void);
void PWM_SetCompare3(uint16_t Compare);
void Servo_SetAngle(float Angle);#endifservo.c文件
#include "servo.h"/*****************辰哥单片机设计******************STM32* 文件 : 舵机驱动模块c文件 * 版本 : V1.0* 日期 : 2024.9.27* MCU : STM32F103C8T6* 接口 : 见代码 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥**********************BEGIN***********************/void Servo_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(SERVO_CLK, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = SERVO_GPIO_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(SERVO_GPIO_PORT, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出TIM_InternalClockConfig(TIM2);//配置时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数模式TIM_TimeBaseInitStructure.TIM_Period = 20000-1; //自动重装ARR 分辨率TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频PSC TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋予初值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 0; //CCRTIM_OC3Init(TIM2,&TIM_OCInitStructure);TIM_Cmd(TIM2,ENABLE);
} void PWM_SetCompare3(uint16_t Compare)
{TIM_SetCompare3(TIM2, Compare); //设置CCR2的值
}void Servo_SetAngle(float Angle)
{PWM_SetCompare3(Angle / 180 * 2000 + 500); //设置占空比//将角度线性变换,对应到舵机要求的占空比范围上
}四、实验效果

五、资料获取
项目分享
相关文章:
舵机驱动详解(模拟/数字 STM32)
目录 一、介绍 二、模块原理 1.舵机驱动原理 2.引脚描述 三、程序设计 main.c文件 servo.h文件 servo.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 舵机(Servo)是在程序的控制下,在一定范围内连续改变输出轴角度并保持的电机系统。即舵机只支持…...

dvwa:文件包含、文件上传
文件包含 本地文件包含(敏感信息泄露)和远程文件包含(命令执行) 本地文件包含一般包含一些本地的敏感文件,如:/etc/passwd或/etc/shadow等 远程文件包含能使得服务器代码执行,如包含黑客vps的…...
——实现Windows服务内嵌WCF服务)
基于 C# .NET Framework 4.0 开发实现 WCF 服务实例详解(二)——实现Windows服务内嵌WCF服务
目录 引言 1. 创建一个新的Windows服务项目 2. 添加WCF服务 2.1 添加服务接口和实现 2.2 添加服务配置 3. 实现Windows服务 3.1 修改Service1类 3.2 在项目中添加ServiceInstaller 4. 安装和运行Windows服务 4.1 编译项目 4.2 使用InstallUtil.exe安装服务 …...

【ArcGIS/C#】调用控制台处理代码
代码示例 private static string[] run_conda_process(string command, Action<string> on_msg, CancellationTokenSource cancel){if (string.IsNullOrEmpty(command)){return new string[]{null,ArcGIS.Desktop.Internal.Core.Conda.Resources.Error_Unexpected + &qu…...

06_23 种设计模式之《适配器模式》
文章目录 一、适配器模式基础知识实例 一、适配器模式基础知识 适配器模式定义:将一个类的接口转换成客户希望的另一个接 口。适配器模式使得原本由于接口不兼容而不能一起工作的那些类可 以一起工作。 Client:客户端,调用自已需要的领域接口…...

Go语言--快速入门
Go语言特点 我们先看一下简单的Go语言程序 package mainimport "fmt"func main() { // 错误,{ 不能在单独的行上fmt.Println("Hello, World!") }我们可以看到外型非常像我们的JAVA,但是不需要;作为结尾,…...

京东云主机怎么用?使用京东云服务器建网站(图文教程)
京东云主机怎么用?非常简单,本文京东云服务器网jdyfwq.com使用以使用京东云服务器搭建WordPress博客网站为例,来详细说下京东云主机的使用方法。使用京东云服务器快速搭建WordPress网站教程,3分钟基于应用镜像一键搞定,…...

Linux 基础入门操作-实验七 进程的介绍
实验七 进程的介绍 7.1 进程基础概念 Linux进程在内存中包含三部分数据:码段、堆栈段和数据段。代码段存放了程序的代码。代码段可以为机器中运行同一程序的数个进程共享。堆栈段存放的是子程序的返回地址、子程序的参数及程序的局部变量。而数据段则存放程序的全…...

SQL进阶技巧:SQL中的正则表达式应用?
目录 0 引言 1. 正则表达式函数 1.1 regexp_extract 1.2 regexp_replace 1.3 regexp_like 2. 在WHERE子句中使用正则表达式 3. 在GROUP BY中使用正则表达式 4. 性能考虑 5. 高级正则表达式技巧 5.1 使用正则表达式进行数据清洗 5.2 使用正则表达式处理JSON 6. 正则…...
算法数组面试理论
数组是存放在连续内存空间内的相同类型数据的集合 (所以在删除添加元素的时候需要移动其他的元素的地址) 数组的元素是不能删除的,只能覆盖。(因为内存地址是连续的,所以不能删除。或者可以这么理解:在一…...

ASP.NET Zero是什么?适合哪些业务场景?
一、ASP.NET Zero是什么? ASP.NET Zero 是一个基于 ASP.NET Boilerplate (ABP) 框架的模板项目,它提供了预建的页面和强大的基础设施架构,以便开发者能够快速开发应用层。它的特点包括但不限于: 多合一解决方案:提供多…...
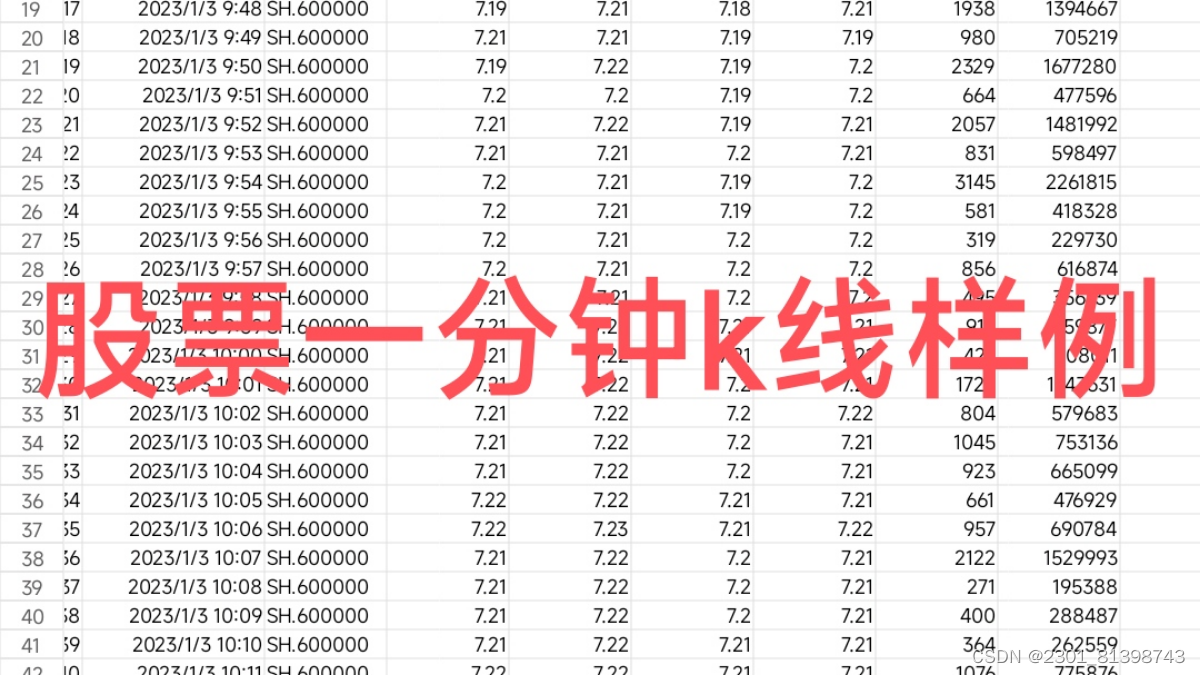
获取期货股票分钟级别数据以及均线策略
【数据获取】 银河金融数据库(yinhedata.com) 能够获取国内外金融股票、期货历史行情数据,包含各分钟级别。 【搭建策略】 均线策略作为一种广泛应用于股票、期货等市场的技术分析方法,凭借其简单易懂、操作性强等特点…...

入门篇-1 数据结构简介
数据结构简介 在计算机科学中,数据结构是指组织、存储和管理数据的方式,它使得数据可以被高效地访问和修改。数据结构是计算机程序设计和算法分析中的一个重要概念,因为它们直接影响到程序的执行效率和内存使用。 1. 什么是数据结构&#x…...

Anaconda安装
1.进入Anaconda官网 2.填写邮箱信息 3.在邮箱消息中获取下载链接 4.进入下载页面,选择合适版本下载 5.进入Anaconda安装界面 6.点击“I agree” 7.选择个人即可“Just Me” 8.选择文件安装路径 9.允许创建快捷方式 10.等待下载 11.完成安装...

Elasticsearch学习笔记(六)使用集群令牌将新加点加入集群
随着业务的增长,陆续会有新的节点需要加入集群。当我们在集群中的某个节点上使用命令生成令牌时会出现报错信息。 # 生成令牌 /usr/share/elasticsearch/bin/elasticsearch-create-enrollment-token -s node出现报错信息: Unable to create enrollment…...
项目建设方案,软件技术方案,整体技术方案,软件建设文档编制(word原件)
1 引言 1.1 编写目的 1.2 项目概述 1.3 名词解释 2 项目背景 3 业务分析 3.1 业务需求 3.2 业务需求分析与解决思路 3.3 数据需求分析【可选】 4 项目建设总体规划【可选】 4.1 系统定位【可选】 4.2 系统建设规划 5 建设目标 5.1 总体目标 5.2 分阶段目标【可选】 5.2.1 业务目…...

vue3定义组件
在Vue 3中,定义组件有多种方式,包括使用单文件组件(Single File Components, SFC)、使用JavaScript对象定义组件、以及使用组合式API(Composition API)。 1. 单文件组件(SFC) 这是…...

BOM常见操作方法汇总
BOM(Browser Object Model,浏览器对象模型)提供了与浏览器窗口交互的方法和属性。BOM 包括了许多对象,如 window、location、history、navigator 等,这些对象提供了与浏览器窗口相关的各种功能。 以下是一些常见的 BO…...

Python+whisper/vosk实现语音识别
目录 一、Whisper 1、Whisper介绍 2、安装Whisper 3、使用Whisper-base模型 4、使用Whisper-large-v3-turbo模型 二、vosk 1、Vosk介绍 2、vosk安装 3、使用vosk 三、总结 一、Whisper 1、Whisper介绍 Whisper 是一个由 OpenAI 开发的人工智能语音识别模型…...

如何在算家云搭建LivePortrait(视频生成)
一、LivePortrait简介 LivePortrait 是一个可控人像视频生成框架,能够准确、实时地将驱动视频的表情、姿态迁移到静态或动态人像视频上,生成极具表现力的视频结果。 该项目的模型产生了定性肖像动画。只要输入一张静态的肖像图像,我们的模型…...

LabVIEW生产者消费者模式进阶:从单队列到多队列的架构设计与实战
1. 生产者/消费者循环的进阶架构:从“一对一”到“一对多”在上一季的分享中,我们详细拆解了生产者/消费者循环的基础模型,即一个生产者任务对应一个消费者任务。这种结构清晰、易于理解,是处理异步任务、解耦数据生成与处理的经典…...

失落大陆建模:亚特兰蒂斯数字重建的结构验证
一、项目背景与目标设定在数字孪生与虚拟考古技术飞速发展的当下,亚特兰蒂斯这一传说中失落大陆的数字重建,不仅是对古老神话的技术致敬,更是对复杂场景建模与结构验证能力的极致考验。本项目旨在依托Blender等3D建模工具,结合最新…...

Spring Boot Microservices故障排查:10个常见问题及解决方案
Spring Boot Microservices故障排查:10个常见问题及解决方案 【免费下载链接】spring-boot-microservices Spring Boot Template for Micro services Architecture - Show cases how to use Zuul for API Gateway, Spring OAuth 2.0 as Auth Server, Multiple Resou…...

Honey Select 2汉化补丁:3分钟快速安装与完整功能指南
Honey Select 2汉化补丁:3分钟快速安装与完整功能指南 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 还在为Honey Select 2的日文界面而烦恼吗&…...

OpenClaw Provider Manager:统一管理第三方服务的微服务治理框架
1. 项目概述与核心价值最近在折腾一些自动化流程和微服务治理,发现一个挺普遍但处理起来又有点琐碎的问题:如何高效、统一地管理那些分散在各个角落的第三方服务提供商(Provider)?比如短信发送、邮件推送、对象存储、支…...

ChartGPT终极指南:如何用AI快速生成专业图表
ChartGPT终极指南:如何用AI快速生成专业图表 【免费下载链接】chart-gpt AI tool to build charts based on text input 项目地址: https://gitcode.com/gh_mirrors/ch/chart-gpt 如果你还在为制作数据图表而烦恼,那么ChartGPT正是你需要的AI图表…...

抖音批量下载神器:三步搞定无水印视频下载,告别手动烦恼
抖音批量下载神器:三步搞定无水印视频下载,告别手动烦恼 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser f…...

人群计数老将CSRNet:6年后再看CVPR2018的洞见,它的设计思想对今天还有何启发?
人群计数经典CSRNet:6年后重审其设计哲学与当代启示 2018年CVPR会议上亮相的CSRNet,在当时以简洁优雅的架构刷新了人群计数任务的性能记录。六年过去,当Vision Transformer、扩散模型等新范式不断冲击计算机视觉领域时,回看这个基…...

从IoU到Shape-IoU:如何让损失函数“看见”边界框的形状与尺度
1. 边界框回归的进化史:从IoU到Shape-IoU 目标检测任务中,边界框回归就像给物体"画框"的过程。早期的IoU(Intersection over Union)指标简单直观——用预测框和真实框的交集面积除以并集面积。这个指标在2016年之前是绝…...
别再只调XGBoost参数了!试试阿里PAI这篇AAAI 2024新作AMFormer,用Transformer做表格数据效果真香
突破表格数据建模瓶颈:AMFormer如何用算术特征交互重塑深度学习方法 在金融风控、医疗诊断和推荐系统等实际业务场景中,结构化表格数据始终占据着核心地位。传统树模型如XGBoost和LightGBM凭借对特征缺失和噪声的鲁棒性,长期统治着这一领域。…...