map_server
地图格式
此软件包中的工具处理的地图以两个文件的形式存储。YAML 文件描述地图的元数据,并命名图像文件。图像文件编码了占用数据。
图像格式
图像文件描述世界中每个单元格的占用状态,并使用相应像素的颜色表示。在标准配置中,较白的像素表示空闲,较黑的像素表示被占用,而介于两者之间的像素表示未知。接受彩色图像,但颜色值会被平均为灰度值。
图像数据通过 SDL_Image 读取;支持的格式根据 SDL_Image 在特定平台上提供的支持而有所不同。通常,大多数流行的图像格式都被广泛支持。值得注意的是,PNG 格式在 OS X 上不受支持。
YAML 格式
YAML 格式通过一个简单、完整的示例来解释:
image: testmap.png
resolution: 0.1
origin: [0.0, 0.0, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
必需字段:
image:包含占用数据的图像文件的路径;可以是绝对路径或相对于 YAML 文件的位置。resolution:地图的分辨率,单位为米/像素。origin:地图中左下角像素的二维位姿,格式为(x, y, yaw),其中yaw是逆时针旋转角度(yaw=0表示无旋转)。目前系统的许多部分忽略了yaw。occupied_thresh:占用概率大于该阈值的像素被认为是完全占用的。free_thresh:占用概率小于该阈值的像素被认为是完全空闲的。negate:是否反转白色/黑色的空闲/占用语义(阈值的解释不受影响)。
可选参数:
mode:可以有三种值:trinary(三值),scale(比例),或raw(原始)。默认是trinary。有关如何更改值解释的详细信息,请参阅下一部分。
值解释
给定一个范围在 [0, 256) 的像素 COLOR 值 x,如何在 ROS 消息中解释该值?首先根据 YAML 中的 negate 标志,将整数 x 转换为浮点数 p。
- 如果
negate为false,则p = (255 - x) / 255.0。这意味着黑色(0)具有最高值(1.0),白色(255)具有最低值(0.0)。 - 如果
negate为true,则p = x / 255.0。这是非标准的图像解释方式,因此称为negate,尽管数学上x并未被取反。
三值(Trinary)模式
标准的解释是三值解释,即所有值的输出都是三种值之一:
- 如果
p > occupied_thresh,则输出值100表示单元格被占用。 - 如果
p < free_thresh,则输出值0表示单元格是空闲的。 - 否则,输出
-1或255(作为无符号字符),表示单元格未知。
比例(Scale)模式
这种解释方式调整了上面的三值解释,允许输出比三值更多的值:
- 如果
p > occupied_thresh,则输出值100。 - 如果
p < free_thresh,则输出值0。 - 否则,输出
99 * (p - free_thresh) / (occupied_thresh - free_thresh)。
这允许输出范围在 [0, 100] 之间的值。要输出 -1,可以使用 PNG 的 alpha 通道,任何透明度都将被解释为未知。
原始(Raw)模式
此模式将为每个像素输出 x,因此输出值在 [0, 255] 之间。
命令行工具
map_server
map_server 是一个 ROS 节点,它从磁盘读取地图并通过 ROS 服务提供该地图。当前实现将地图图像数据中的颜色值转换为三值占用状态:空闲(0)、占用(100)和未知(-1)。未来的版本可能会使用介于 0 和 100 之间的值来表示占用的细微差别。
用法
map_server <map.yaml>
示例:
rosrun map_server map_server mymap.yaml 发布的主题:
map_metadata(nav_msgs/MapMetaData):通过此锁存的主题接收地图元数据。map(nav_msgs/OccupancyGrid):通过此锁存的主题接收地图。
服务
static_map(nav_msgs/GetMap):通过此服务获取地图。
参数:
~frame_id(string,默认值:"map"):发布的地图中设置的帧 ID。
map_saver
map_saver 从 SLAM 映射服务中保存地图到磁盘。
用法
rosrun map_server map_saver [--occ <threshold_occupied>] [--free <threshold_free>] [-f <mapname>] map:=/your/costmap/topic 示例:
rosrun map_server map_saver -f mymap rosrun map_server map_saver --occ 90 --free 10 -f mymap map:=/move_base/global_costmap/costmap 订阅的主题:
map(nav_msgs/OccupancyGrid):地图通过此锁存的主题接收。
相关文章:

map_server
地图格式 此软件包中的工具处理的地图以两个文件的形式存储。YAML 文件描述地图的元数据,并命名图像文件。图像文件编码了占用数据。 图像格式 图像文件描述世界中每个单元格的占用状态,并使用相应像素的颜色表示。在标准配置中,较白的像素…...

无人机航拍视频帧处理与图像拼接算法
无人机航拍视频帧处理与图像拼接算法 1. 视频帧截取与缩放 在图像预处理阶段,算法首先逐帧地从视频中提取出各个帧。 对于每一帧图像,算法会执行缩放操作,以确保所有帧都具有一致的尺寸,便于后续处理。 2. 图像配准 在图像配准阶段,算法采用SIFT(尺度不变特征变换)算…...

搬砖11、Python 文件和异常
文件和异常 实际开发中常常会遇到对数据进行持久化操作的场景,而实现数据持久化最直接简单的方式就是将数据保存到文件中。说到“文件”这个词,可能需要先科普一下关于文件系统的知识,但是这里我们并不浪费笔墨介绍这个概念,请大…...
24.6 监控系统在采集侧对接运维平台
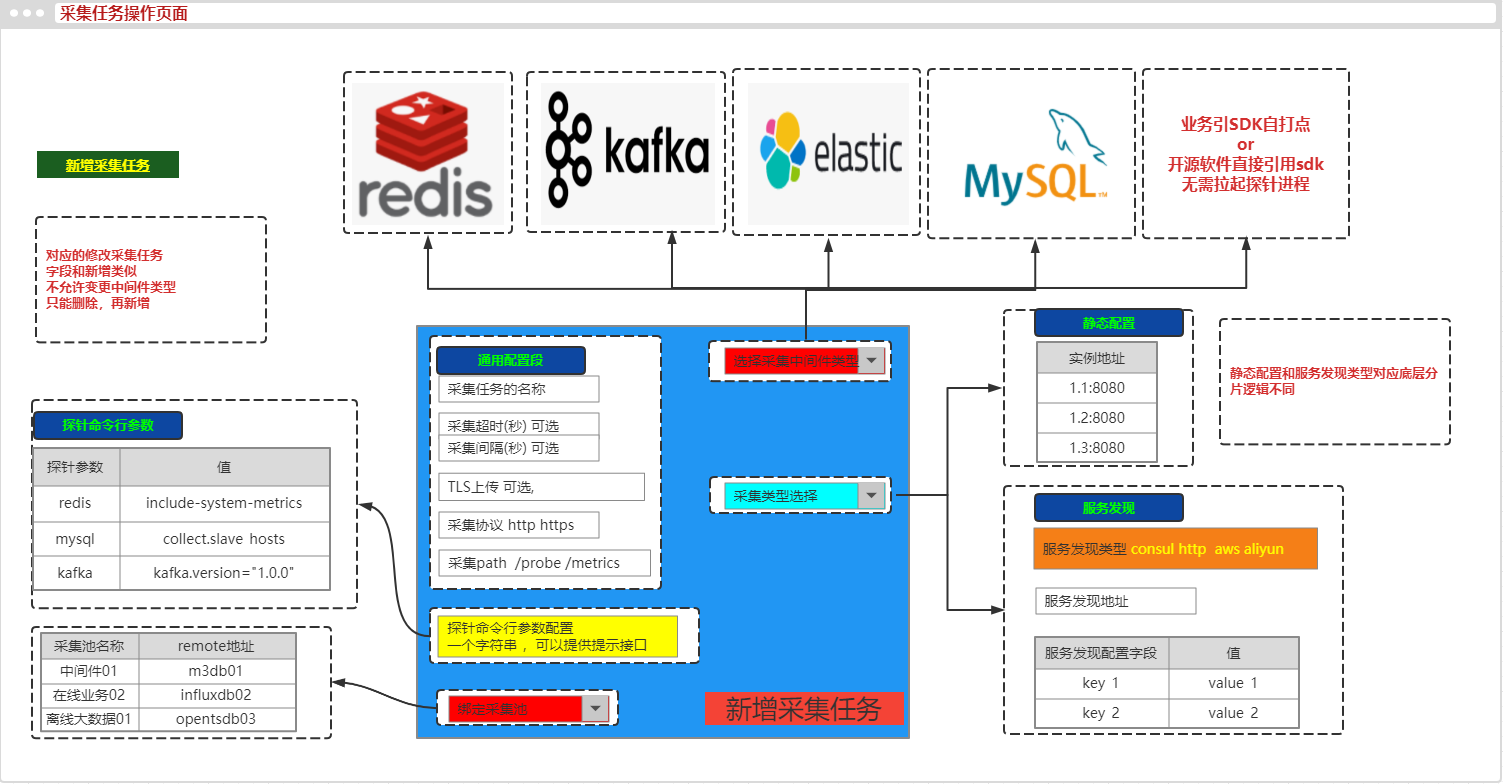
本节重点介绍 : 监控系统在采集侧对接运维平台 服务树充当监控系统的上游数据提供者在运维平台上 可以配置采集任务 exporter改造成探针型将给exporter传参和修改prometheus scrape配置等操作页面化 监控系统在采集侧对接运维平台 服务树充当监控系统的上游数据提供者在运…...

refresh-1
如果设置了刷新标志(refreshFlag): - 如果CAT(配置文件管理代理)未初始化,eUICC应返回一个错误代码commandError。 - 对于MEP-A2,eUICC可以返回一个错误代码commandError。 - 如果目标端口上正…...
如何写好一篇计算机应用的论文?
计算机应用是一个广泛的领域,涵盖了从软件开发到数据分析、人工智能、网络安全等多个方向。选择一个合适的毕业设计题目,不仅要考虑个人兴趣和专业技能,还要考虑项目的可行性、创新性以及对未来职业发展的帮助。以下是一些建议,帮…...

工业 5.0 时代的数字孪生:迈向高效和可持续的智能工厂
数字孪生(物理机器或流程的虚拟代表)正在彻底改变工业物联网和流程监控。这项新兴技术可实现实时模拟,提高效率、可持续性并降低成本。航空航天和汽车等行业已经从这些创新系统中获益匪浅 数字孪生是数字模拟器的演变,因此&#x…...

Python脚本之获取Splunk数据发送到第三方UDP端口
原文地址:https://www.program-park.top/2024/10/12/python_21/ 在 Linux 环境执行脚本,Python需要引入对应依赖: pip install splunk-sdk离线环境下,可手动执行python进入 Python 解释器的交互式界面,输入以下命令&a…...

Protobuf:复杂类型接口
Protobuf:复杂类型接口 package字段规则复杂类型enumAnyoneofmap 本博客基于proto3语法,讲解protobuf中的复杂类型。 package 在.proto文件中,支持导入其它.proto文件的内容,例如: test.proto: syntax …...

Git Push 深度解析:命令的区别与实践
目录 命令一:git push origin <branch-name>命令二:git push Factory_sound_detection_tool test工作流程:两者的主要区别实践中的应用总结 Git 是一种分布式版本控制系统,它允许用户对代码进行版本管理。在 Git 中…...
大数据开发基础实训室设备
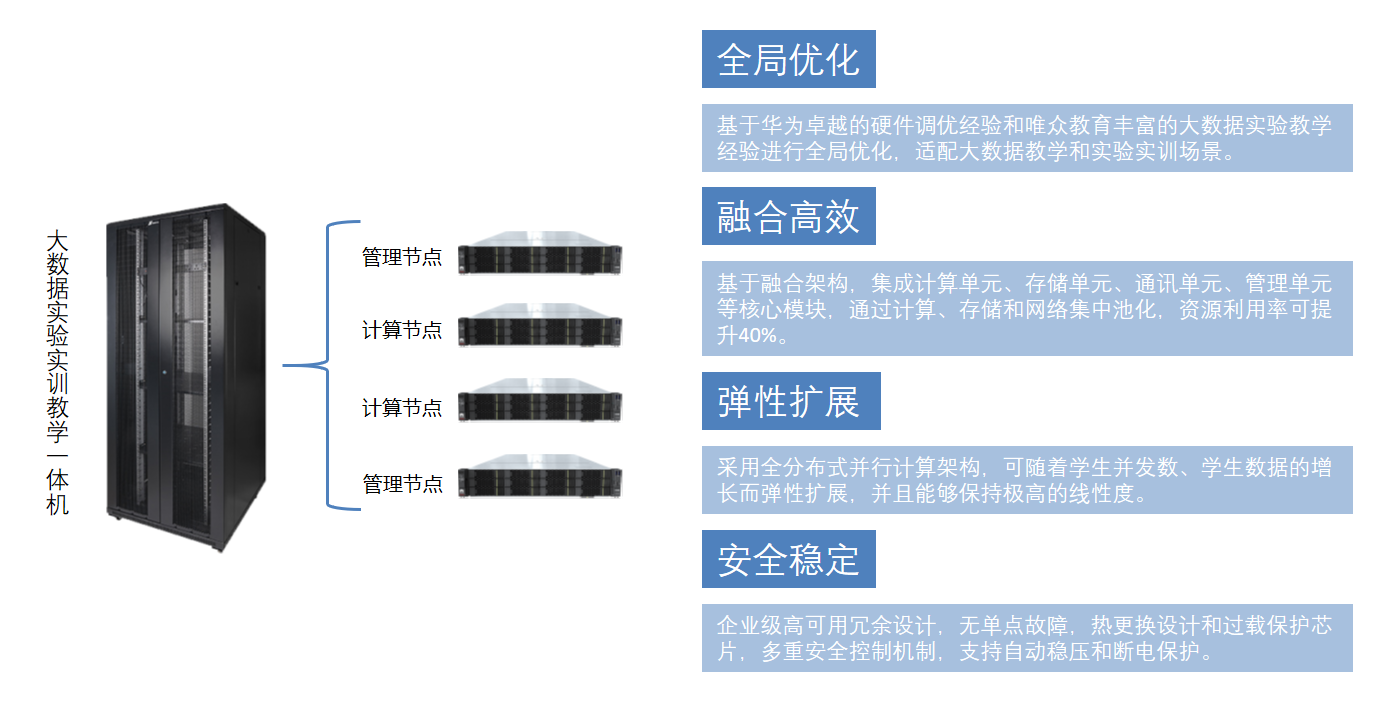
大数据实验实训一体机 大数据实验教学一体机是一种专为大数据教育设计的软硬件融合产品,其基于华为机架服务器进行了调优设计,从而提供了卓越的性能和稳定性。这一产品将企业级虚拟化管理系统与实验实训教学信息化平台内置于一体,通过软硬件…...
)
【数据结构】string(C++模拟实现)
string构造 string::string(const char* str):_size(strlen(str)) {_str new char[_size 1];_capacity _size;strcpy(_str, str); }// s2(s1) string::string(const string& s) {_str new char[s._capacity 1];strcpy(_str, s._str);_size s._size;_capacity s._cap…...

【笔记】I/O总结王道强化视频笔记
文章目录 从中断控制器的角度来理解整个中断处理的过程复习 处理器的中断处理机制**中断驱动I/O方式** printf——从系统调用到I/O控制方式的具体实现1轮询方式下输出一个字符串(程序查询)中断驱动方式下输出一个字符串中断服务程序中断服务程序与设备驱动程序之间的关系 DMA方…...

XML XSLT:转换与呈现数据的力量
XML XSLT:转换与呈现数据的力量 XML(可扩展标记语言)和XSLT(XML样式表转换语言)是现代信息技术中不可或缺的工具,它们在数据交换、存储和呈现方面发挥着重要作用。本文将深入探讨XML和XSLT的概念、应用及其在信息技术领域的重要性。 XML:数据交换的标准 XML是一种用于…...

ES6总结
1.let和const以及与var区别 1.1 作用域 var: 变量提升(Hoisting):var 声明的变量会被提升到其作用域的顶部,但赋值不会提升。这意味着你可以在声明之前引用该变量(但会得到 undefined)。 con…...

晶体匹配测试介绍
一、晶体参数介绍 晶体的电气规格相对比较简单,如下: 我们逐一看看每个参数, FL就是晶体的振动频率,这个晶体是24.576MHz的。 CL就是负载电容,决定了晶体频率是否准确,包括外接的实际电容、芯片的等效电容以及PCB走线的寄生电容等,核心参数。 Frequency Tolerance是…...

超声波清洗机靠谱吗?适合学生党入手的四款眼镜清洗机品牌推荐!
有没有学生党还不知道双十一买什么?其实可以去看看超声波清洗机,说实话它的实用性真的很高,对于日常用于清洗眼镜真的非常合适,不仅可以帮助大家节约时间而且还能把眼镜清洗的干净透亮,接下来我就来为大家带来四款好用…...

Java生成图片_基于Spring AI
Spring AI 优势 过去,使用Java编写AI应用时面临的主要困境是没有统一且标准的封装库,开发者需自行对接各个AI服务提供商的接口,导致代码复杂度高、迁移成本大。如今,Spring AI Alibaba的出现极大地缓解了这一问题,它提…...

程序传入单片机的过程,以Avrdude为例分析
在市场上有各式各样的单片机,例如Arduino,51单片机,STM等。通常,我们都用其对应的IDE软件进行单片机的编程。这些软件既负责将程序代码转写成二进制代码,即机器语言,也负责将该二进制代码导入单片机。与此同…...

用YOLO和LLM增强的OCR
虽然最近我花了很多时间在大型语言模型 (LLM) 上进行实验,但我对计算机视觉的热情始终未减。因此,当我有机会将两者融合在一起时,我迫不及待地想要立即开始。在 Goodreads 上扫描书籍封面并将其标记为已读一直感觉有点神奇,我很兴…...

数据投毒太多,尝试把资料搬进本地知识库
说实话,这几天没睡好。上周翻到一个新闻,看得我后背发凉——谷歌首次发现攻击者用AI开发“零日漏洞”攻击工具。不是概念验证,是真实案例。攻击者拿AI绕过双重认证,代码写得跟教科书似的,还带“幻觉”出来的CVSS评分。…...

从零上手RP2040:为树莓派Pico注入MicroPython灵魂
1. 为什么选择MicroPython? 对于刚接触树莓派Pico(RP2040)的新手来说,选择MicroPython作为开发语言是个明智的决定。这就像第一次学骑自行车时选择带辅助轮的车子——它降低了入门门槛,让你能快速感受到编程的乐趣。Mi…...

双足机器人步态规划算法与动平衡控制【附仿真】
✨ 长期致力于双足机器人、步态规划、动平衡控制、运动发散分量、模型预测控制、二次优化、可视化仿真研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)…...

长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受 作为一名中度频率的大模型API使用者,我的日常工作涉及代码生…...

Arm DynamIQ DSU L3缓存电源管理技术解析
1. Arm DynamIQ DSU L3缓存电源管理技术全景解析在现代处理器架构设计中,缓存子系统往往占据芯片总功耗的30%-40%,其中L3共享末级缓存因其大容量特性成为功耗优化的重点对象。Arm DynamIQ™架构创新的DSU(DynamIQ Shared Unit)通过…...

Ansys Mechanical|远程点Behavior设置:刚性与柔性选择背后的工程考量
1. 远程点Behavior设置的核心逻辑 在Ansys Mechanical中,远程点(Remote Point)的Behavior设置看似只是一个简单的下拉选项,实则直接影响整个仿真结果的准确性。我见过太多工程师在这里踩坑,包括我自己早期也犯过错误。…...

3步实现微信聊天记录永久备份:WeChatExporter完整解决方案
3步实现微信聊天记录永久备份:WeChatExporter完整解决方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因手机丢失或系统更新而永远丢失珍贵的微信…...

SecureCRT 9.1.0不止是安装:揭秘高级功能如会话日志、脚本自动化与安全配置最佳实践
SecureCRT 9.1.0高阶实战:从会话审计到自动化运维的全栈指南 SecureCRT早已超越基础终端工具的范畴,成为运维工程师手中的瑞士军刀。当大多数教程还在反复讲解安装步骤时,真正的高阶用户已经在用会话日志构建操作审计体系,通过脚本…...

WinForm用户控件调试踩坑记:从‘无法试运行’到完美模块测试的完整流程
WinForm用户控件调试实战:从模块移植到精准测试的完整指南 引言:为什么需要独立的控件测试环境? 在WinForm开发中,用户控件(UserControl)的复用与调试一直是让开发者头疼的问题。当你在主项目中直接测试一个复杂控件时,…...

Apex Legends压枪宏终极指南:轻松掌握自动武器检测与后坐力补偿技术
Apex Legends压枪宏终极指南:轻松掌握自动武器检测与后坐力补偿技术 【免费下载链接】Apex-NoRecoil-2021 Scripts to reduce recoil for Apex Legends. (auto weapon detection, support multiple resolutions) 项目地址: https://gitcode.com/gh_mirrors/ap/Ape…...