RTC -
RTC
目录
RTC
回顾
RTC
如何实现RTC制作一个时钟日历
代码编写
rtc.c完整代码
模块开发的步骤:
1、找文档
2、 在文档里面找通信方式,通信过程(协议)
3、代码>
-- 前面学的是模块的开发,串口类,IO类,ADC类设备,从这章开始,依然学习模块开发,但是方式不一样,之前代码都是自己写的,现在要学的是库开发,代码都是现成的
- 今天用库开发方式
-- 什么叫库开发,代码都是现成的
-- 那么我们还做什么呢?
- 三件事:移植,修改,使用
移植:把代码拿过来,放到工程里面
修改:修改错误或者修改一些参数配置
使用:应用
这三步都很重要
-- 在库开发阶段,可能会出现这些问题:
- 可能会出现代码看不明白,具体是代码的细节看不明白(不需要深入纠结代码)
在库开发阶段,核心就是应用
回顾
- DMA的本质是数据传输的快速通道,特点:无需CPU干预
DMA 一般不会单独出现,他一定和其他外设一块使用。
比如说:dma 去实现 printf (dma 和 usart1 TX)
RTC
-
首先查找参考手册,了解RTC
-
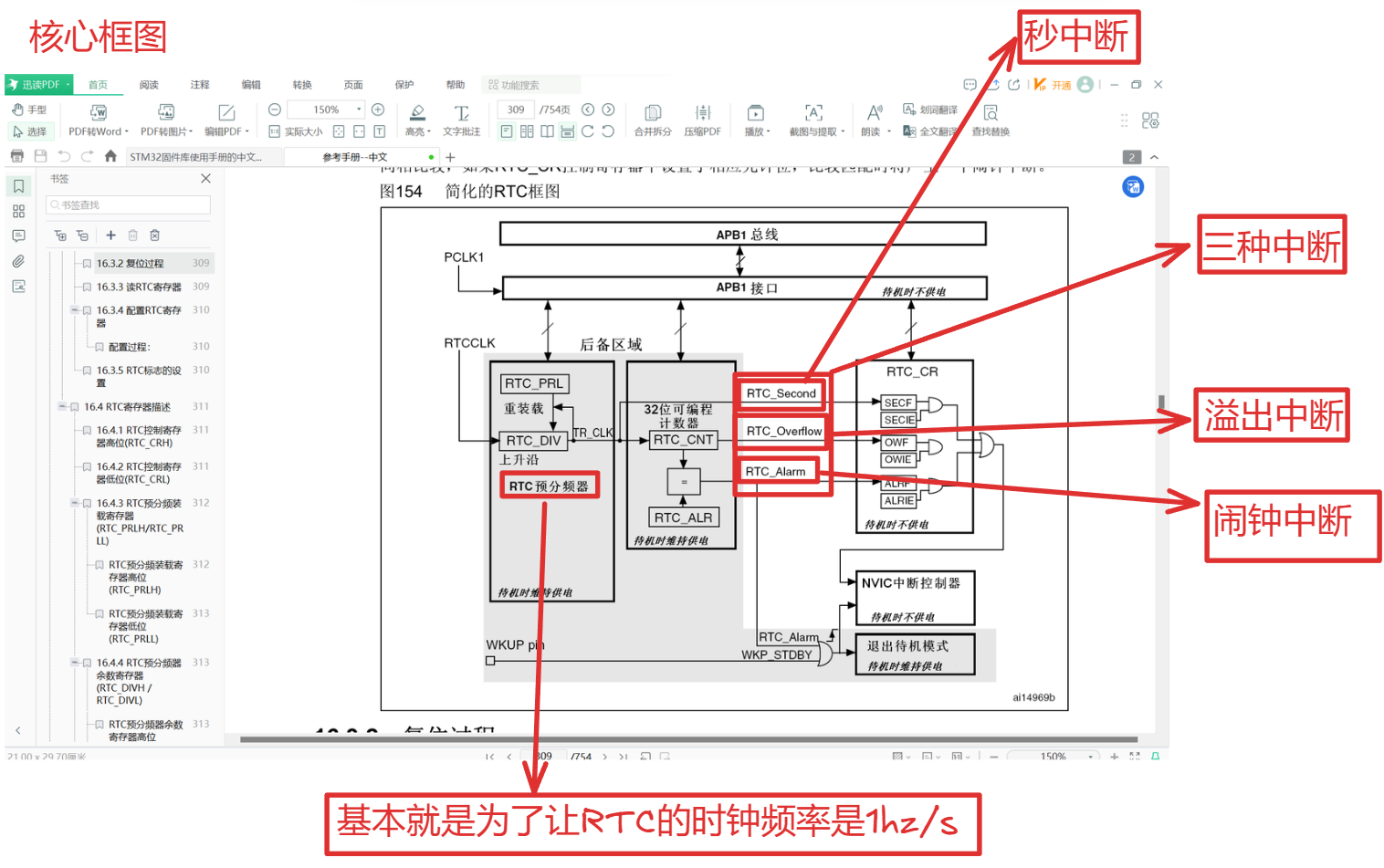
看核心框图
-- 单片机的时钟源有四个(外部高速(HSE),内部高速(HSI),外部低速(LSE),内部低速(LSI))
-- RTC的是时钟源有三个:外部低速(32.768khz),内部低速(40khz),外部高速(72M)/128(=562500)
如何实现RTC制作一个时钟日历
1、时钟芯片 DS1302.
2、单片机内部的 RTC
时间相关:定时器
计数器:16 位
分频系数:16 位 2^16 如果单片机的频率是72MHZ,那么经过2^16次分频后,频率为72MHZ/2^16 = 1098hz
最大的计时时间? 2^16/1098 = 59.6 S 1min
所以经过上面的计算,tim 能实现时钟日历吗? 不太行 (最大的计时时间才1min)
单片机上有一个专门用来制作时钟日历的定时器:RTC
-- RTC的特点:
- 1.计数时间长
计数器:32 位 2^32
最大的计数时间大概 136 年
分频:20 位 2^20 1hz/s
时钟源:外部低速(32.768K) 内部低速(40K) 外部高速/128(562500hz)
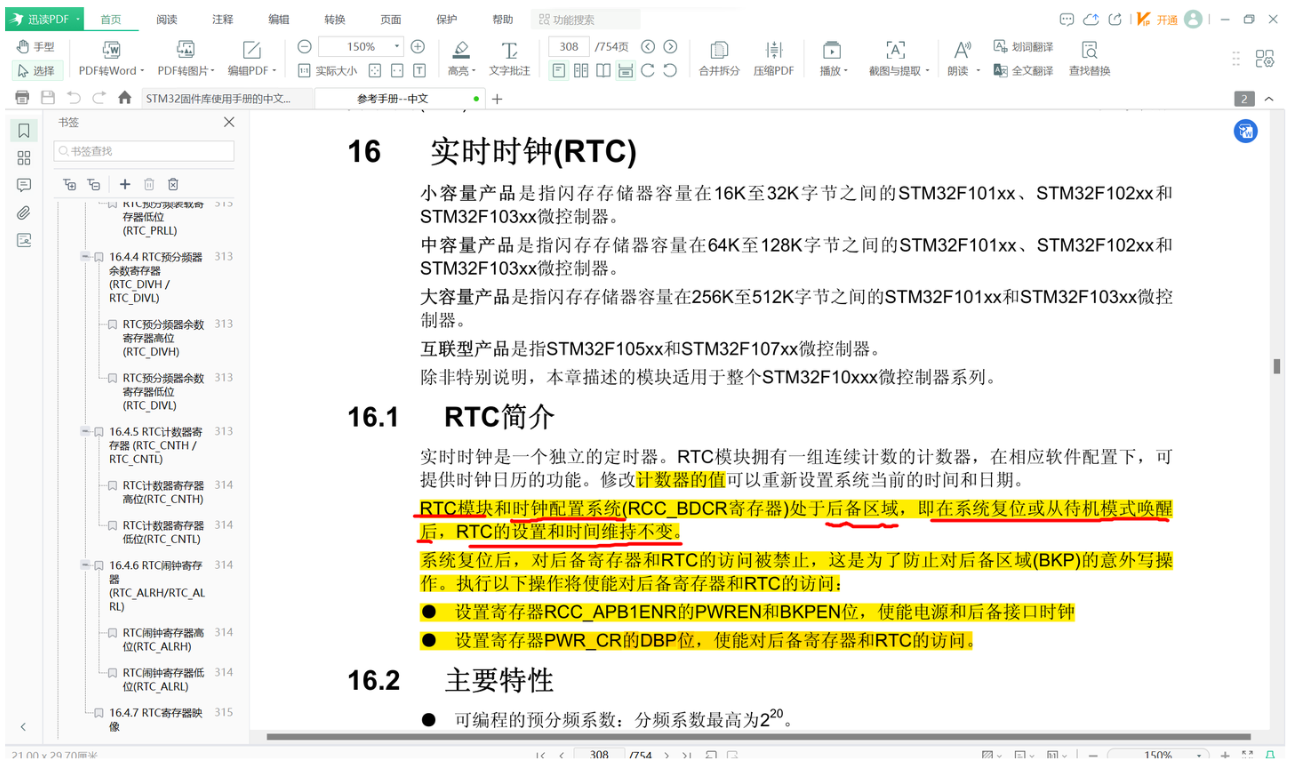
- 2.RTC 在单片机处于后备区域
后备区域:一般情况,单片机上电之后,禁止访问的区域,有单独供电(和单片机的供电不是同一个)
所有时钟芯片,都会存在一个问题:时间长了,就会不准。
解决问题:联网定期更新时间(获取的是世界标准时间,和北京时间有 8 个小时时差)
代码编写
-
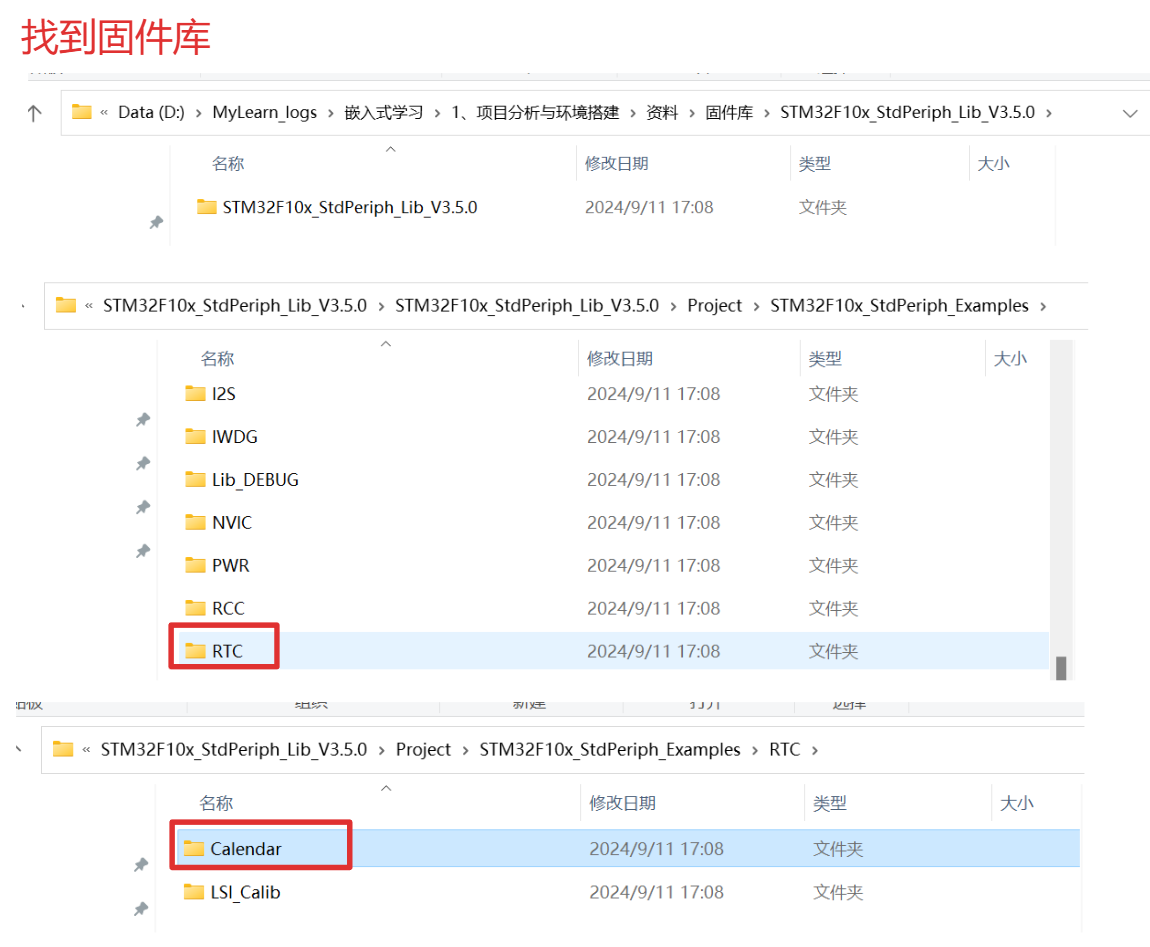
先找到固件库
-
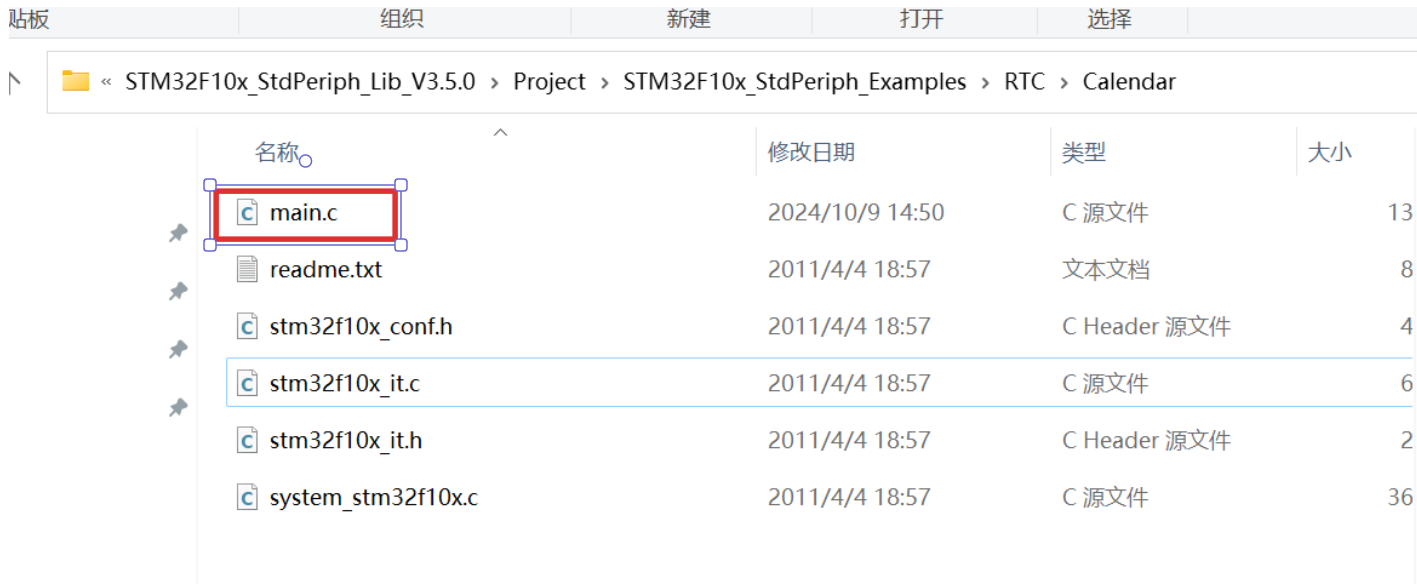
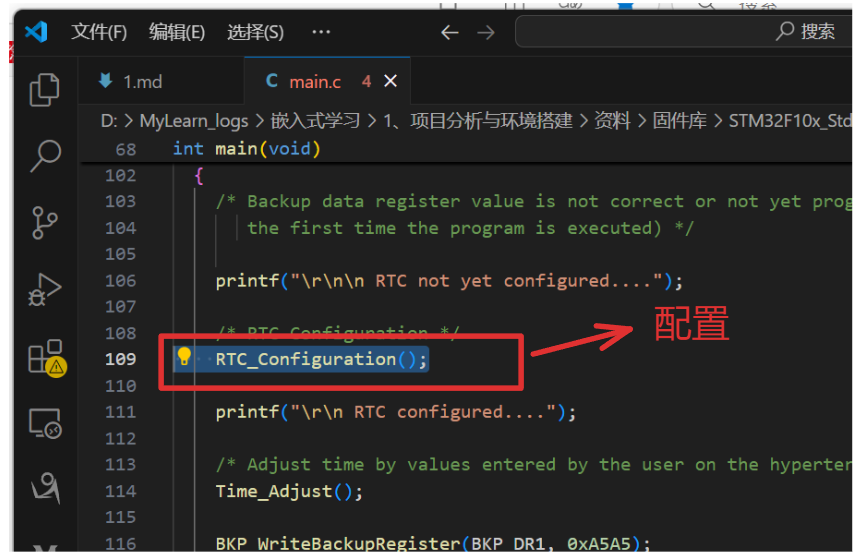
打开main.c文件,找到RTC的初始化函数
-
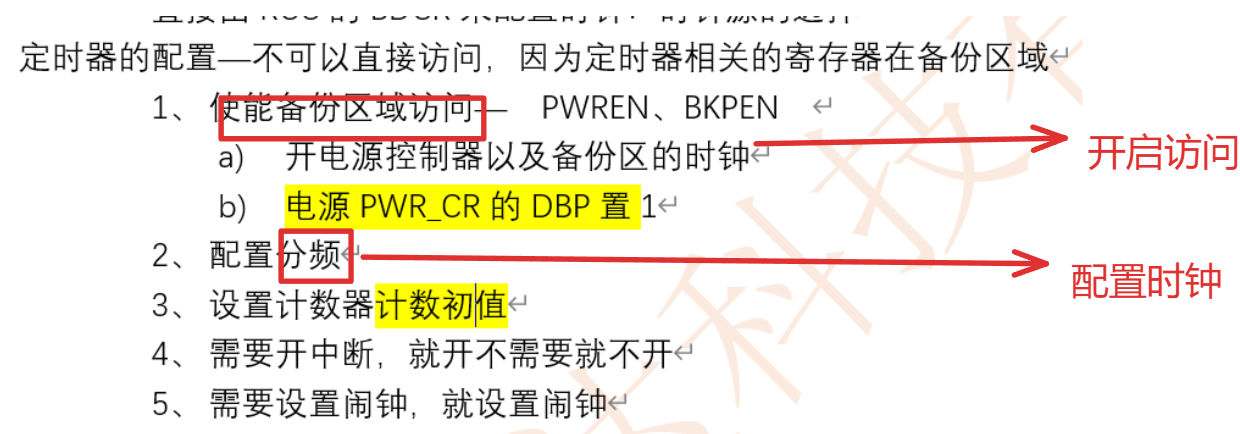
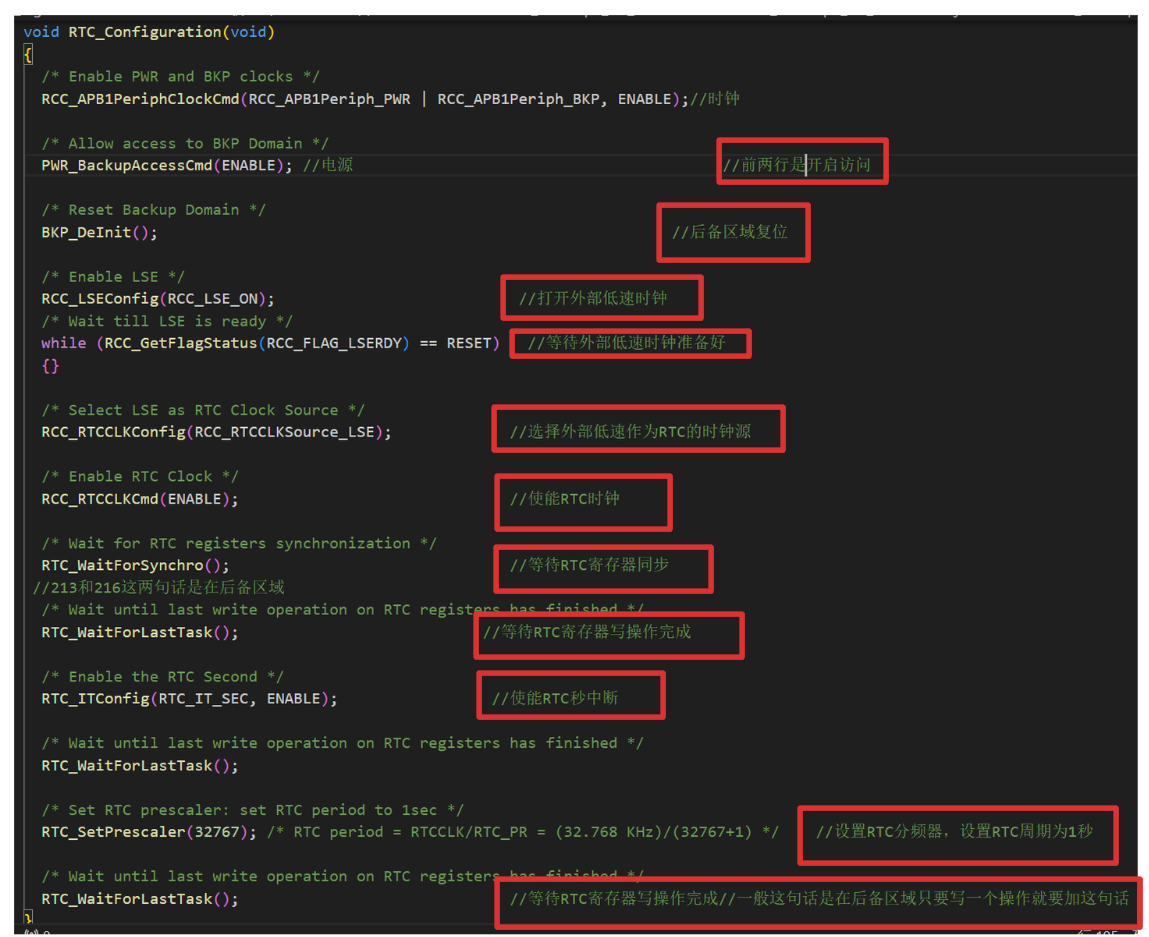
看参考手册中,找到RTC的配置过程
-
在main.c文件中找到相应的配置代码,找到配置函数,跳到相应的函数定义。
-
RTC的配置
-
选择我们用到的加到我们的工程中
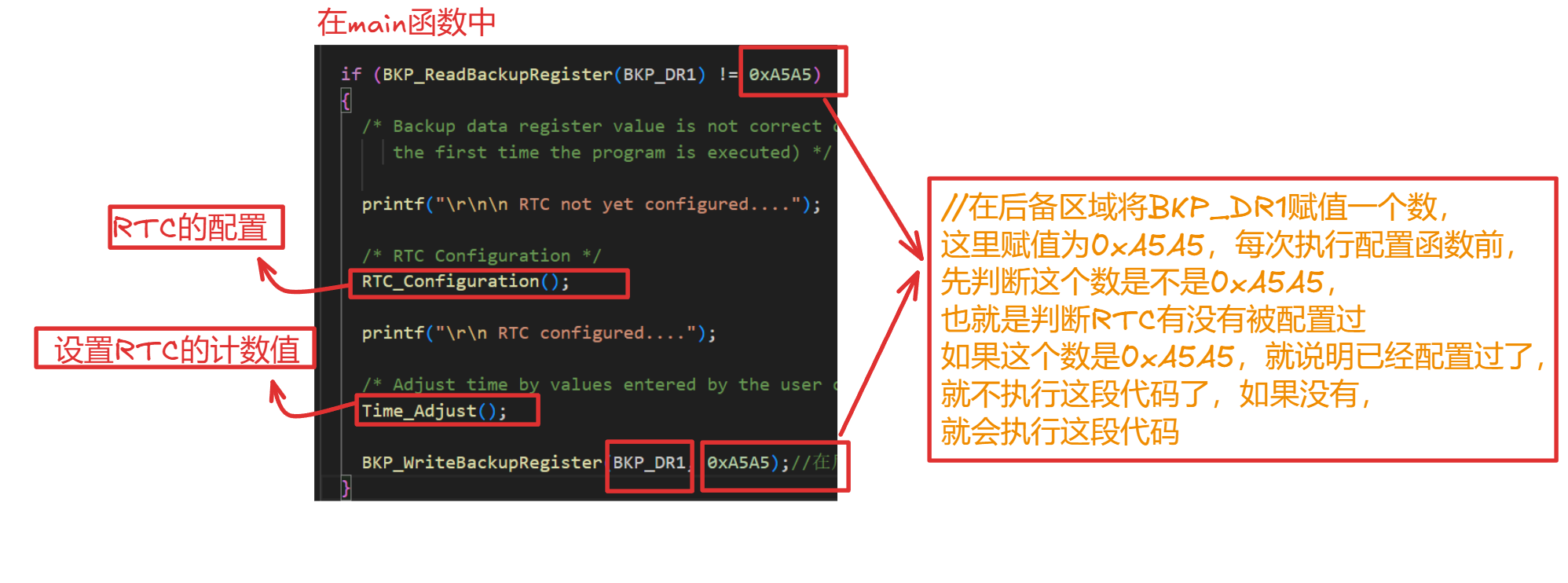
if (BKP_ReadBackupRegister(BKP_DR1) != 0x1234){//1、使能访问/* Enable PWR and BKP clocks */RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);//时钟/* Allow access to BKP Domain */PWR_BackupAccessCmd(ENABLE); //电源 //前两行开启访问//2、时钟源和分频/* Enable LSE */RCC_LSEConfig(RCC_LSE_ON);/* Wait till LSE is ready */while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET){}/* Select LSE as RTC Clock Source */RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);/* Enable RTC Clock */RCC_RTCCLKCmd(ENABLE);/* Wait for RTC registers synchronization */RTC_WaitForSynchro();/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();/* Set RTC prescaler: set RTC period to 1sec */RTC_SetPrescaler(32767); /* RTC period = RTCCLK/RTC_PR = (32.768 KHz)/(32767+1) *//* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();- 设置计数初值
//3、计数初值/* Change the current time */RTC_SetCounter(1728444875);//赋一个初值,一个秒数/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();BKP_WriteBackupRegister(BKP_DR1, 0x1234);
- 读取时间
struct tm a = {0};void get_time(void)
{uint32_t sec = RTC_GetCounter();//struct tm *p = &a;a = *(localtime((time_t*)&sec));printf("%04d/%02d/%02d %02d:%02d:%02d\r\n",a.tm_year+1900,a.tm_mon+1,a.tm_mday,a.tm_hour+8,a.tm_min,a.tm_sec);}
- 更新时间,因为该单片机没有纽扣电池,断电后数值就会丢失,重新上电后就会从初始值开始计数
//用来更新RTC时间的void updata_time(uint32_t sec)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);//时钟/* Allow access to BKP Domain */PWR_BackupAccessCmd(ENABLE); //电源 /* Change the current time */RTC_SetCounter(sec);//赋一个初值,一个秒数/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();}
- main.c
rtc_init();while(1){if(rtctime >=999){rtctime = 0;get_time();}if(keytime>=50)//50ms执行一次{keyflag = get_key();switch(keyflag){case 1:updata_time(1728455609);break;case 2: break;}}}
-- tip:
-
如果要修改时钟源
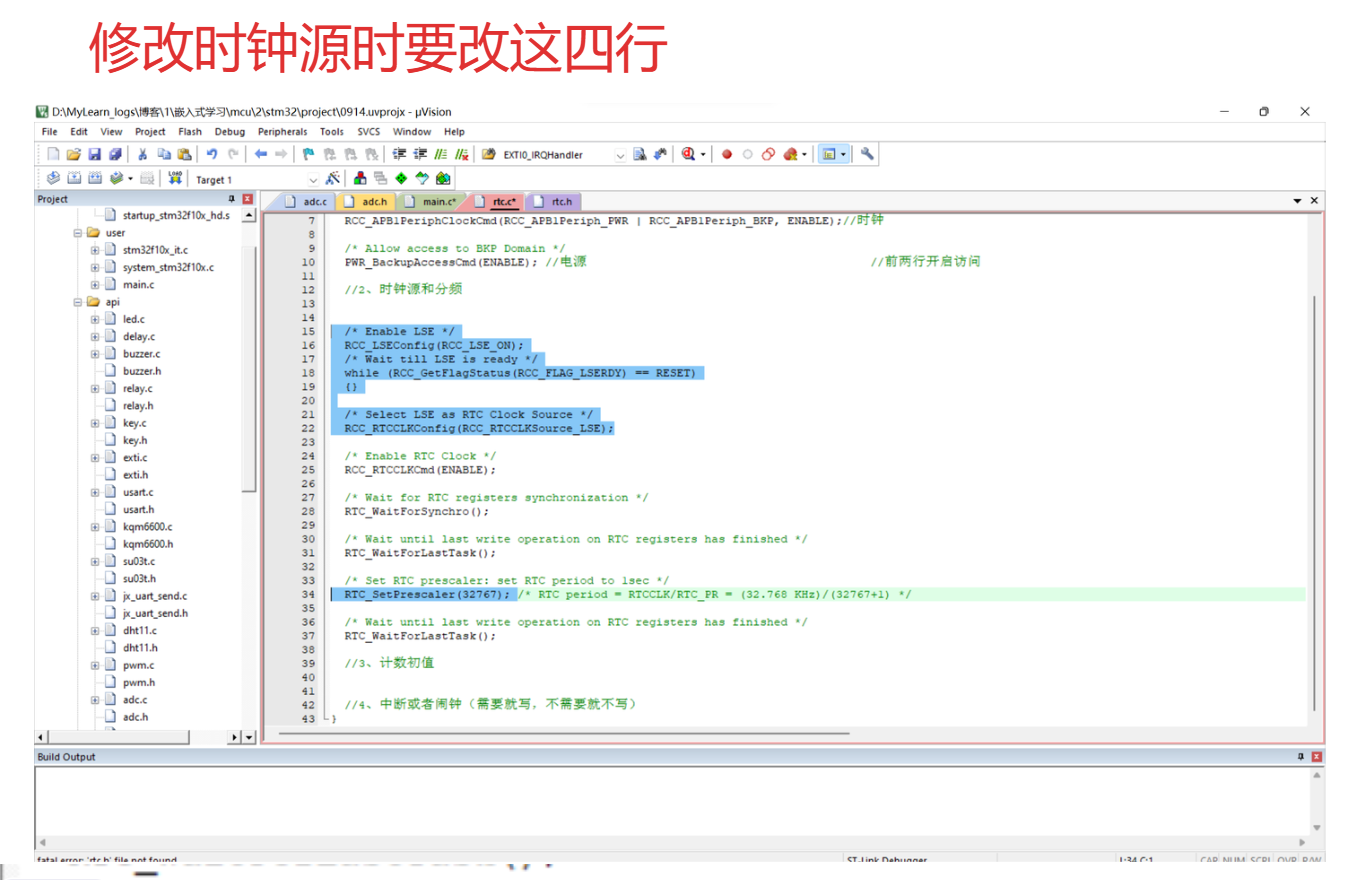
-
计数的初值是什么(是一个时间戳,我们只需要将当前时间的时间戳赋值进去即可)

rtc.c完整代码
#include "rtc.h"
#include "time.h"void rtc_init(void)
{if (BKP_ReadBackupRegister(BKP_DR1) != 0x1234){//1、使能访问/* Enable PWR and BKP clocks */RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);//时钟/* Allow access to BKP Domain */PWR_BackupAccessCmd(ENABLE); //电源 //前两行开启访问//2、时钟源和分频/* Enable LSE */RCC_LSEConfig(RCC_LSE_ON);/* Wait till LSE is ready */while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET){}/* Select LSE as RTC Clock Source */RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);/* Enable RTC Clock */RCC_RTCCLKCmd(ENABLE);/* Wait for RTC registers synchronization */RTC_WaitForSynchro();/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();/* Set RTC prescaler: set RTC period to 1sec */RTC_SetPrescaler(32767); /* RTC period = RTCCLK/RTC_PR = (32.768 KHz)/(32767+1) *//* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();//3、计数初值/* Change the current time */RTC_SetCounter(1728444875);//赋一个初值,一个秒数/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();BKP_WriteBackupRegister(BKP_DR1, 0x1234);
}// //4、中断或者闹钟(需要就写,不需要就不写)
//
// //中断----------------------------------------------
//
// RTC_ITConfig(RTC_IT_SEC, ENABLE); //使能RTC秒中断// /* Wait until last write operation on RTC registers has finished */
// RTC_WaitForLastTask();
//
// NVIC_InitTypeDef NVIC_InitStructure;// /* Configure one bit for preemption priority */
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);// /* Enable the RTC Interrupt */
// NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// NVIC_Init(&NVIC_InitStructure);
//
// //---------------------------------------------------}//中断服务函数//void RTC_IRQHandler(void)
//{
// if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
// {
// /* Clear the RTC Second interrupt */
// RTC_ClearITPendingBit(RTC_IT_SEC);// /* Wait until last write operation on RTC registers has finished */
// RTC_WaitForLastTask();
//
// }
//}struct tm a = {0};void get_time(void)
{uint32_t sec = RTC_GetCounter();//struct tm *p = &a;a = *(localtime((time_t*)&sec));printf("%04d/%02d/%02d %02d:%02d:%02d\r\n",a.tm_year+1900,a.tm_mon+1,a.tm_mday,a.tm_hour+8,a.tm_min,a.tm_sec);}//因为该单片机没有纽扣电池,断电后数值就会丢失,重新上电后就会从初始值开始计数
//用来更新RTC时间的void updata_time(uint32_t sec)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);//时钟/* Allow access to BKP Domain */PWR_BackupAccessCmd(ENABLE); //电源 /* Change the current time */RTC_SetCounter(sec);//赋一个初值,一个秒数/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();}
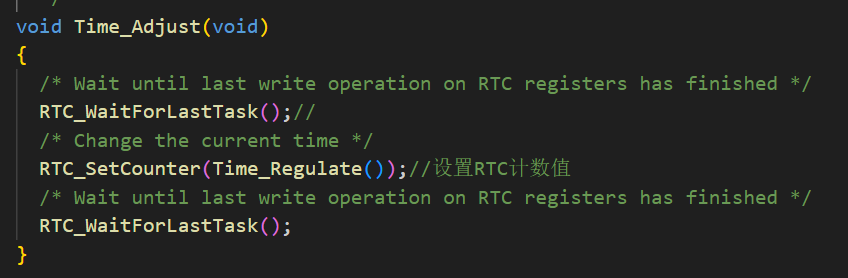
用RTC实现闹钟功能
- 这里要使用闹钟中断
-- 1、在初始化函数中加入中断和闹钟的初始化
-- 2、写中断服务函数,这里用RTC的中断服务函数即可,不用专门用闹钟的中断服务函数
-- 3、在主函数中只要将初始化函数写入main函数中,就可以达到闹钟的效果
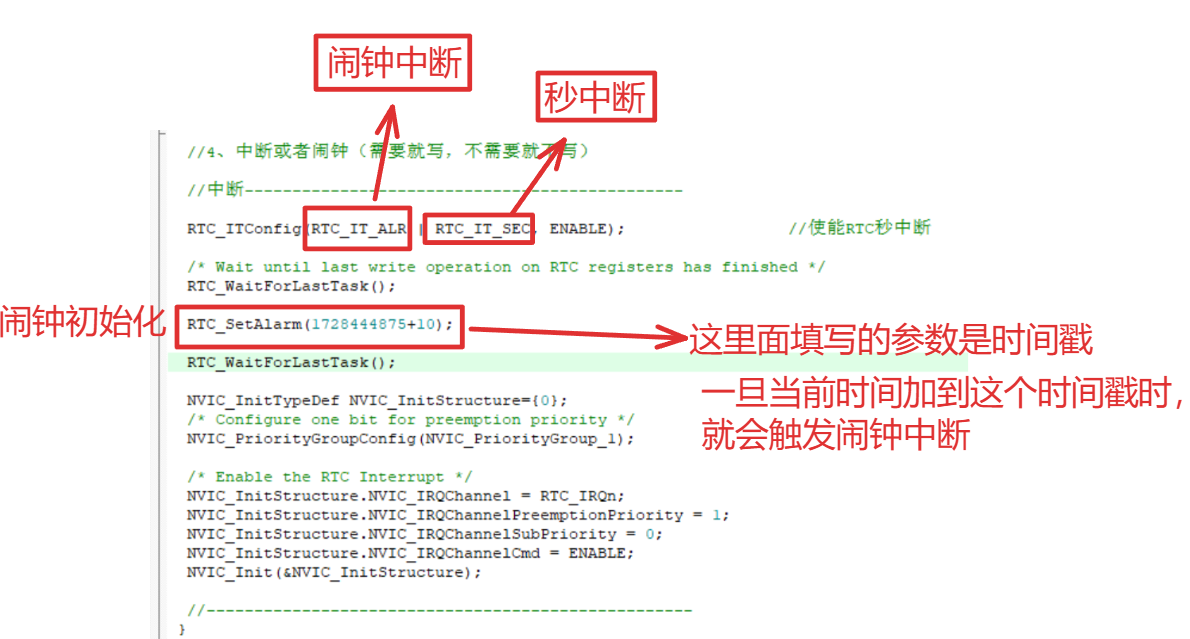
-- 主要代码
#include "rtc.h"
#include "relay.h"
#include "delay.h"uint16_t naozhong = 0;void rtc_init(void)
{//if (BKP_ReadBackupRegister(BKP_DR1) != 0x1233){//1、使能访问/* Enable PWR and BKP clocks */RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);//时钟/* Allow access to BKP Domain */PWR_BackupAccessCmd(ENABLE); //电源 //前两行开启访问//2、时钟源和分频/* Enable LSE */RCC_LSEConfig(RCC_LSE_ON);/* Wait till LSE is ready */while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET){}/* Select LSE as RTC Clock Source */RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);/* Enable RTC Clock */RCC_RTCCLKCmd(ENABLE);/* Wait for RTC registers synchronization */RTC_WaitForSynchro();/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();/* Set RTC prescaler: set RTC period to 1sec */RTC_SetPrescaler(32768); /* RTC period = RTCCLK/RTC_PR = (32.768 KHz)/(32767+1) *//* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();//3、计数初值/* Change the current time */RTC_SetCounter(1728444875);//赋一个初值,一个秒数/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();BKP_WriteBackupRegister(BKP_DR1, 0x1233);
}//4、中断或者闹钟(需要就写,不需要就不写)//中断----------------------------------------------RTC_ITConfig(RTC_IT_ALR | RTC_IT_SEC, ENABLE); //使能RTC秒中断/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();RTC_SetAlarm(1728444875+10);RTC_WaitForLastTask();NVIC_InitTypeDef NVIC_InitStructure={0};/* Configure one bit for preemption priority */NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);/* Enable the RTC Interrupt */NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);//---------------------------------------------------}//中断服务函数void RTC_IRQHandler(void)
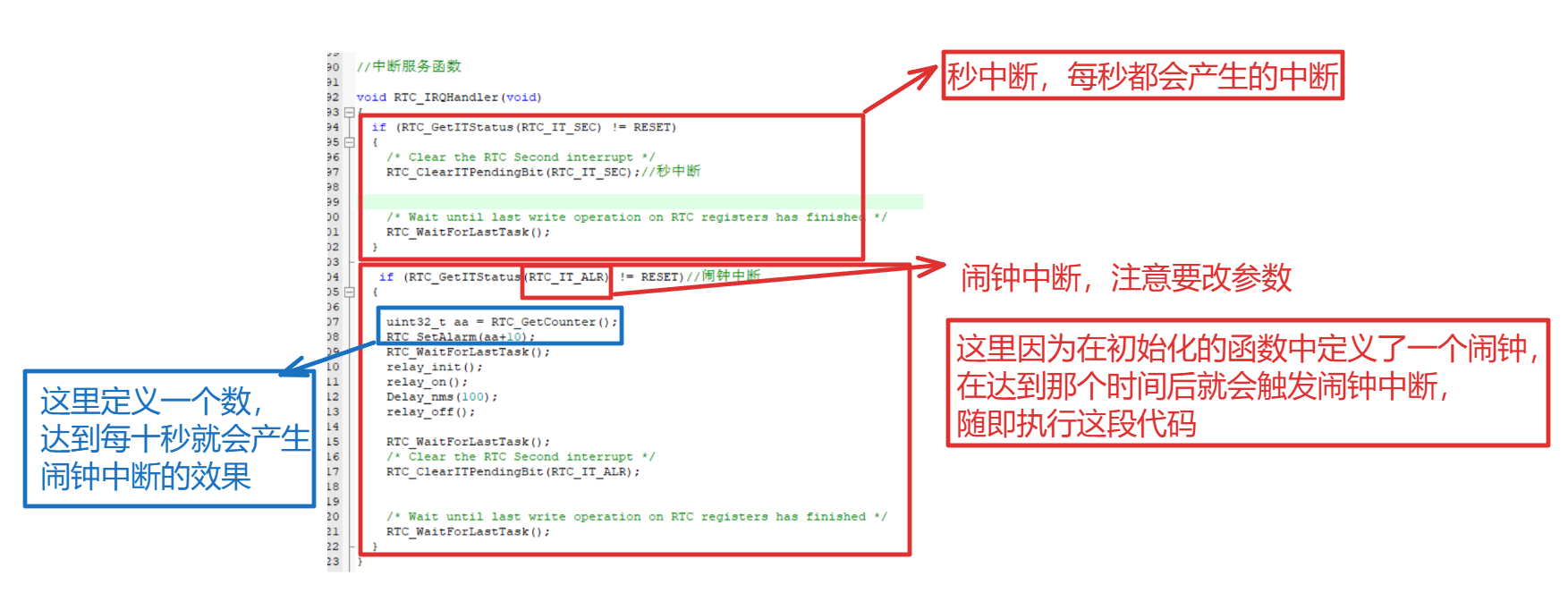
{if (RTC_GetITStatus(RTC_IT_SEC) != RESET){/* Clear the RTC Second interrupt */RTC_ClearITPendingBit(RTC_IT_SEC);//秒中断/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();}if (RTC_GetITStatus(RTC_IT_ALR) != RESET)//闹钟中断{uint32_t aa = RTC_GetCounter();RTC_SetAlarm(aa+10);RTC_WaitForLastTask();relay_init();relay_on();Delay_nms(100);relay_off();RTC_WaitForLastTask();/* Clear the RTC Second interrupt */RTC_ClearITPendingBit(RTC_IT_ALR);/* Wait until last write operation on RTC registers has finished */RTC_WaitForLastTask();}
}
相关文章:
RTC -
RTC 目录 RTC 回顾 RTC 如何实现RTC制作一个时钟日历 代码编写 rtc.c完整代码 模块开发的步骤: 1、找文档 2、 在文档里面找通信方式,通信过程(协议) 3、代码> -- 前面学的是模块的开发,串口类,I…...

图像处理中常用的统计矩
目录 原点矩中心矩常用的统计矩偏度(Skewness)定义解释 峰度(Kurtosis)定义解释 统计矩的应用MATLAB相关函数 原点矩(Moment about the Origin)和中心矩(Central Moment)是概率论和数…...
Ubuntu 详解| Ubuntu ssh| Ubuntu apt命令大全| Ubuntu性能优化| Ubuntu换镜像源
Ubuntu 是Debian开源linux系统体系下的子分支之一 Debian-ubuntu 和它一样的还有 kali(一款渗透测试软件) Debian-kali 小白参考 :Centos 7.9 安装 图解版 小白必看 最新_centos7.9-CSDN博客文章浏览阅读2.5k次,点赞…...

Linux安全命令(Linux Security Commands)
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 本人主要分享计算机核心技…...

2024最新版安装教程!Python安装+PyCharm安装使用教程!!(非常简单)
Python下载安装 一、进入Python官网首页,下载最新版的Python 官方网址:Download Python | Python.org 鼠标悬浮在Downloads,选择最新版本 注意:由于Python官网服务器设立在国外,所以下载速度非常慢,我这…...

C++:STL:vector类常用函数介绍(附加部分重要函数模拟实现)
cplusplus.com/reference/vector/vector/https://cplusplus.com/reference/vector/vector/ vector在实际中非常的重要,在实际中我们熟悉常见的接口就可以,有了string的基础,vector其实大体使用方法上二者是类似的: 这里我们先给…...

[工程构建] 使用 pkg-config 的 cmake 模板
可执行文件 # 1) cmake basic cmake_minimum_required(VERSION 3.12) #cmake version check set(CXX_STANDARD 17) #c standard version)# 2) project info #auto generated variables as below: #PROJECT_NAME: "hello" #hello_BINARY_DIR: build root dir #hello_…...

MATLAB 注释快捷键
matlab 前言单行注释多行注释 快捷键使用菜单 前言 单行注释 % 这是一个单行注释 x 10; % 这是另一个单行注释多行注释 %{ 这是一个多行注释 它可以包含多行文本 x 10; % 这行代码也会被注释掉 %}快捷键 在 MATLAB 编辑器中,可以使用快捷键来快速注释和取消注…...

8.优化存储过程的性能(8/10)
优化存储过程的性能 1.引言 存储过程是数据库系统中预先编写好的SQL语句集合,它们被保存在数据库服务器上,可以在需要时被调用执行。存储过程的使用可以提高数据库操作的效率,减少网络通信,并且可以封装复杂的逻辑,使…...

Django发送邮件代理服务器配置
根路由下配置 MAIL_BACKEND django.core.mail.backends.smtp.EmailBackend EMAIL_HOST smtp.qq.com EMAIL_HOST_USER 66897079qq.com EMAIL_HOST_PASSWORD aavlzhzvqorbcahcEMAIL_PORT 465 EMAIL_USE_SSL True发送邮件 message "<p>尊敬的用户您好ÿ…...

uniapp__微信小程序使用秋云ucharts折线图双轴
1、子组件 <template><view class"charts-box"><qiun-data-charts type"line":opts"computedOpts":chartData"chartData"/></view> </template><script> export default {props: {chartData: {t…...
)
云原生运维 - 旅程(简约版)
1. 入门阶段 理论学习: 了解云计算和容器技术的基本概念。学习Docker基础知识,包括容器创建、镜像管理等。阅读Kubernetes官方文档的入门部分,了解Kubernetes的核心概念。 实操练习: 安装Docker环境。运行你的第一个Docker容器…...

2014年国赛高教杯数学建模B题创意平板折叠桌解题全过程文档及程序
2014年国赛高教杯数学建模 B题 创意平板折叠桌 某公司生产一种可折叠的桌子,桌面呈圆形,桌腿随着铰链的活动可以平摊成一张平板(如图1-2所示)。桌腿由若干根木条组成,分成两组,每组各用一根钢筋将木条连接…...

PyCharm打开及配置现有工程(详细图解)
本文详细介绍了如何利用Pycharm打开一个现有的工程,其中包括编译器的配置。 PyCharm打开及配置现有工程 1、打开工程2、配置编译器 1、打开工程 双击PyCharm软件,点击左上角 文件 >> 打开(O)… 选中想要打开的项目之后点击“确定” 2、配置编译器…...

CSP-J
CSP那些事儿 OI赛制是啥OI赛制下的CCF-CSPCSP简介CSP-J考试(仅山东)考试时间考试地点考试结构 写在最后有趣的代码: OI赛制是啥 OI赛制,不详细说了,就是一股脑做好几个题,一起提交的比赛(通俗易…...

Linux系统:Linux中ln命令用法
ln命令功能 将一个文件或目录在同一个文件系统或者另一个不同的文件系统的某个位置建立一个链接,类似windows系统中的超链接,这样当我们在链接处访问被链接的目录或文件时就可以通过此链接来访问,不必要再进入要访问的文件系统中。 建立链接…...

在SpringBoot+VUE中 实现登录-RSA的加密解密
步骤-先理清楚在动手 前端首先调用后端的公钥接口,在前端加密密码传输至后端登录接口后端用私钥解密码拿着用户名去数据库查询出来的盐值加密的 密码1用私钥解密密码登录密码加盐值得到 密码2比较密码1与密码2,相同则登录成功,跳转首页|其他页面 前端实…...

基于Android11简单分析audio_policy_configuration.xml
开篇先贴上一个高通的例子,后续基于此文件做具体分析。 1 <?xml version"1.0" encoding"UTF-8" standalone"yes"?> 2 <!-- Copyright (c) 2016-2019, The Linux Foundation. All rights reserved 3 Not a Contribut…...

kafka-manager修改zookeeper端口号后启动仍然连接2181端口
问题描述: zookeeper默认端口号修改为了2182,kafka-manager的配置文件application.conf中也已经修改了zkhosts为新的端口号,然而启动kafka-manger时报错连接连接超时,发现连接的还是2181端口,很奇怪?&…...

RabbitMQ 入门(三)SpringAMQP
一、Spring AMQP 简介 SpringAMQP是基于RabbitMQ封装的一套模板,并且还利用SpringBoot对其实现了自动装配,使用起来非常方便。 SpringAmqp的官方地址:https://spring.io/projects/spring-amqp SpringAMQP提供了三个功能: - 自动…...

穿越机老鸟踩坑实录:MPU6000传感器在F4飞控上的IMU方向“玄学”配置
穿越机IMU方向配置实战:从MPU6000异常自旋到飞控底层校准 当你的穿越机在通电瞬间像被无形大手狠狠抽了一记耳光般疯狂自旋,而Betaflight地面站里陀螺仪数据却显示"一切正常"时,这往往意味着你正遭遇IMU方向配置的"量子纠缠态…...

移动端大语言模型本地部署:从模型轻量化到推理引擎实战
1. 项目概述:当GPT遇见移动端,一个开源项目的诞生最近在GitHub上闲逛,发现了一个挺有意思的项目,叫Taewan-P/gpt_mobile。光看名字,你大概就能猜到它的核心:把类似GPT这样的大语言模型(LLM&…...

如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验?
如何通过Jellyfin Android TV客户端打造家庭影院级媒体体验? 【免费下载链接】jellyfin-androidtv Android TV Client for Jellyfin 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-androidtv 想要在智能电视上享受专业的媒体管理体验吗?…...

避坑指南:Unity热重载插件内存占用高?可能是Windows Defender在搞鬼
Unity热重载性能优化:解决Windows Defender导致的资源占用问题 当你在Unity开发过程中频繁修改C#代码时,热重载(Hot Reload)功能无疑是提升效率的利器。它能让你在游戏运行状态下即时看到代码修改效果,避免反复重启带来的时间浪费。然而&…...

纯视觉纵深无感管控,落地硐室无人少人化透明值守模式技术白皮书
纯视觉纵深无感管控,落地硐室无人少人化透明值守模式技术白皮书副标题:摒弃井下繁杂传感布设,依靠暗光三维实景重构、深部空间无感感知、盲区跨镜无痕跟踪、身体指纹生物核验,实现井下 24 小时无人值守、全域透明运维前言矿山井下…...

如何为深信服超融合平台上的应用快速接入大模型能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何为深信服超融合平台上的应用快速接入大模型能力 对于在深信服超融合平台上部署业务应用的企业开发团队而言,集成智…...

Nixtla时间序列预测生态:从统计模型到深度学习的统一实践
1. 项目概述:时间序列预测的“瑞士军刀”如果你正在处理时间序列数据,无论是销售预测、服务器监控、还是能源消耗分析,那么你很可能听说过或正在使用一些经典的库,比如statsmodels、prophet,或者更现代的深度学习框架。…...
CircuitPython与NeoPixel实战:从硬件连接到动态灯光效果
1. 项目概述:用Python点亮你的硬件创意如果你玩过Arduino,可能会觉得C/C的语法和库管理有点门槛;如果你熟悉Python,又觉得它和硬件之间隔着一层纱。那么,当Raspberry Pi Pico这块性价比极高的微控制器,遇上…...

CI/CD安全最佳实践:保护软件交付流程
CI/CD安全最佳实践:保护软件交付流程 一、CI/CD安全最佳实践概述 1.1 CI/CD安全最佳实践的定义 CI/CD安全最佳实践是指在持续集成和持续部署流程中实施的安全策略和措施。它涵盖代码提交、构建、测试、部署等各个阶段的安全防护。 1.2 CI/CD安全最佳实践的价值 安全…...

AI模型GUI开发实战:从架构设计到部署的完整指南
1. 项目概述:一个为AI模型打造的图形化交互界面最近在GitHub上看到一个挺有意思的项目,叫GrahamMiranda-AI/openclaw-model-gui。光看名字,就能猜个八九不离十:这大概率是一个为某个名为“OpenClaw”的AI模型配套开发的图形用户界…...