【智能算法应用】长鼻浣熊优化算法求解二维路径规划问题
摘要
本文采用长鼻浣熊优化算法 (Coati Optimization Algorithm, COA) 求解二维路径规划问题。COA 是一种基于长鼻浣熊的觅食和社群行为的智能优化算法,具有快速收敛性和较强的全局搜索能力。通过仿真实验,本文验证了 COA 在复杂环境下的路径规划性能,结果表明其能够有效避障并找到全局最优路径。
理论
1. 长鼻浣熊优化算法 (COA)
长鼻浣熊优化算法是一种新兴的智能算法,模仿了长鼻浣熊在觅食和寻找栖息地过程中展现出的复杂行为。COA 中,个体通过对食物的嗅觉线索和群体中的信息交流来逐步优化位置,从而达到寻优目标。COA 的基本步骤如下:
-
初始化种群:随机生成若干个体的位置,代表初始解。
-
觅食行为:根据目标函数评价每个个体的位置质量。
-
局部搜索:模拟长鼻浣熊的探测行为,在附近区域进行搜索以寻找更优解。
-
信息共享:个体之间交换信息以加速全局收敛。
-
更新位置:根据觅食成功的情况更新个体位置。
-
终止条件:达到最大迭代次数或目标函数收敛。
2. 二维路径规划问题
路径规划是机器人和无人机导航中的核心问题之一,其目标是从起始位置到达目标位置的过程中,尽量避开障碍物并找到最短路径。路径规划问题通常可以表示为:
其中,𝑥𝑖为路径中的节点, 𝑑(𝑥𝑖,𝑥𝑖+1) 为节点间的距离,𝑓(𝑥)是路径的总长度目标函数。为了解决该问题,COA 通过全局搜索和局部搜索结合的方式,逐步逼近最优路径。
实验结果
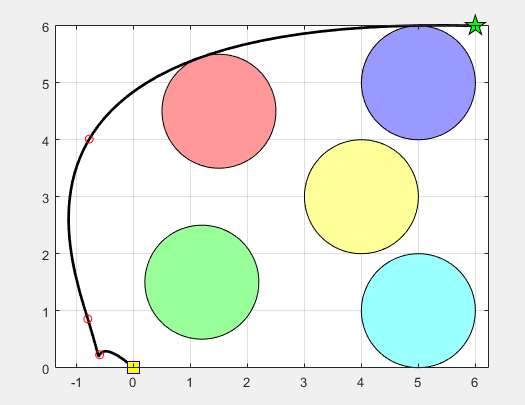
实验中,使用 COA 对二维路径规划问题进行求解。实验环境包含多个障碍物,起始位置位于图的左下角 (黄色方块),目标位置位于右上角 (绿色五角星)。图中显示了 COA 规划的路径 (黑色线条) 成功避开了障碍物,并找到了从起点到终点的最优路径。
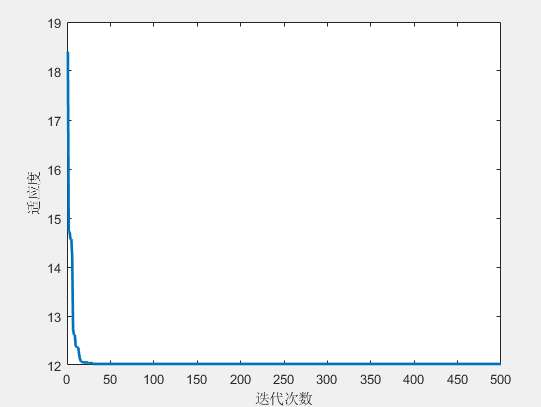
从实验结果可以看到,经过约 50 次迭代,算法快速收敛,目标函数值在迭代过程中迅速降低并趋于稳定 (见第二张图)。COA 展现出了良好的收敛性和路径规划能力。
部分代码
% 初始化参数
max_iter = 500; % 最大迭代次数
n_coatis = 30; % 种群大小
dim = 2; % 问题维度
lb = -1; % 下边界
ub = 6; % 上边界% 初始化种群位置
coatis = lb + (ub-lb).*rand(n_coatis, dim);% 目标函数
objective_func = @(x) sum(sqrt(sum((x(2:end,:) - x(1:end-1,:)).^2, 2)));% 记录最优解
best_sol = coatis(1,:);
best_fitness = objective_func(coatis(1,:));for iter = 1:max_iter% 觅食行为及更新位置for i = 1:n_coatisnew_pos = coatis(i,:) + randn(1, dim); % 局部搜索new_pos = min(max(new_pos, lb), ub); % 边界限制fitness = objective_func(new_pos);if fitness < best_fitnessbest_fitness = fitness;best_sol = new_pos;endend% 记录迭代结果fitness_history(iter) = best_fitness;
end% 绘制路径规划结果
figure;
hold on;
plot(best_sol(:,1), best_sol(:,2), 'k-', 'LineWidth', 2);
scatter(-1, 0, 's', 'MarkerEdgeColor', 'yellow', 'MarkerFaceColor', 'yellow'); % 起点
scatter(6, 6, 'p', 'MarkerEdgeColor', 'green', 'MarkerFaceColor', 'green'); % 终点
title('COA Path Planning');
xlabel('X-axis');
ylabel('Y-axis');
参考文献
❝
Arora, S., and Singh, S., "Coati optimization algorithm for global optimization," Expert Systems with Applications, vol. 120, pp. 364-378, 2019.
LaValle, S.M., Planning Algorithms, Cambridge University Press, 2006.
Kennedy, J., and Eberhart, R., "Particle swarm optimization," in Proceedings of IEEE International Conference on Neural Networks, vol. 4, pp. 1942-1948, 1995.
Ge, S.S., and Cui, Y.J., “Dynamic motion planning for mobile robots using potential field method,” Autonomous Robots, vol. 13, no. 3, pp. 207-222, 2002.
(文章内容仅供参考,具体效果以图片为准)
相关文章:
【智能算法应用】长鼻浣熊优化算法求解二维路径规划问题
摘要 本文采用长鼻浣熊优化算法 (Coati Optimization Algorithm, COA) 求解二维路径规划问题。COA 是一种基于长鼻浣熊的觅食和社群行为的智能优化算法,具有快速收敛性和较强的全局搜索能力。通过仿真实验,本文验证了 COA 在复杂环境下的路径规划性能&a…...

微服务中的负载均衡算法与策略深度解析
在微服务架构中,负载均衡是保证系统高可用性和高性能的关键技术。通过合理地将请求分配给多个服务实例,负载均衡策略可以优化资源利用,实现请求的均衡处理。本文将深入探讨微服务中的负载均衡算法及其配置策略,帮助读者更好地理解…...

初知C++:AVL树
文章目录 初知C:AVL树1.AVL树的概念2.AVL树的是实现2.1.AVL树的结构2.2.AVL树的插入2.3.旋转2.4.AVL树的查找2.5.AVL树平衡检测 初知C:AVL树 1.AVL树的概念 • AVL树是最先发明的自平衡⼆叉查找树,AVL是⼀颗空树,或者具备下列性…...

[LeetCode] 67. 二进制求和
题目描述: 给你两个二进制字符串 a 和 b ,以二进制字符串的形式返回它们的和。 示例 1: 输入:a "11", b "1" 输出:"100" 示例 2: 输入:a "1010", b "…...

工业物联网关-ModbusTCP
Modbus-TCP模式把网关视作Modbus从端设备,主端设备可以通过Modbus-TCP协议访问网关上所有终端设备。用户可以自定义多条通道,每条通道可以配置为TCP Server或者TCP Slave。注意,该模式需要指定采集通道,采集通道可以是串口和网口通…...

子组件向父组件传值$emit
点击子组件的按钮,将子组件的值传递给父组件,并进行提示。 子组件 <template><div><button click"emitIndex">clickme</button></div> </template> <script> export default {methods: {emitInde…...

校车购票微信小程序的设计与实现(lw+演示+源码+运行)
摘 要 由于APP软件在开发以及运营上面所需成本较高,而用户手机需要安装各种APP软件,因此占用用户过多的手机存储空间,导致用户手机运行缓慢,体验度比较差,进而导致用户会卸载非必要的APP,倒逼管理者必须改…...

【Golang】关于Go语言中的定时器原理与实战应用
✨✨ 欢迎大家来到景天科技苑✨✨ 🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,…...

matlab不小心删除怎么撤回
预设项——>删除文件——>移动至临时文件夹 tem临时文件夹下...

云原生、云计算、虚拟化概念概述
(带着批评阅读,不对的请评论区补充) 1、出现年代前后顺序 虚拟化------>云计算------>云原生 2、虚拟化 虚拟化侧重描述实现,最开始的技术是模拟、hook指令执行软件程序,后续出现了半虚拟化、CPU硬件提供虚拟化…...
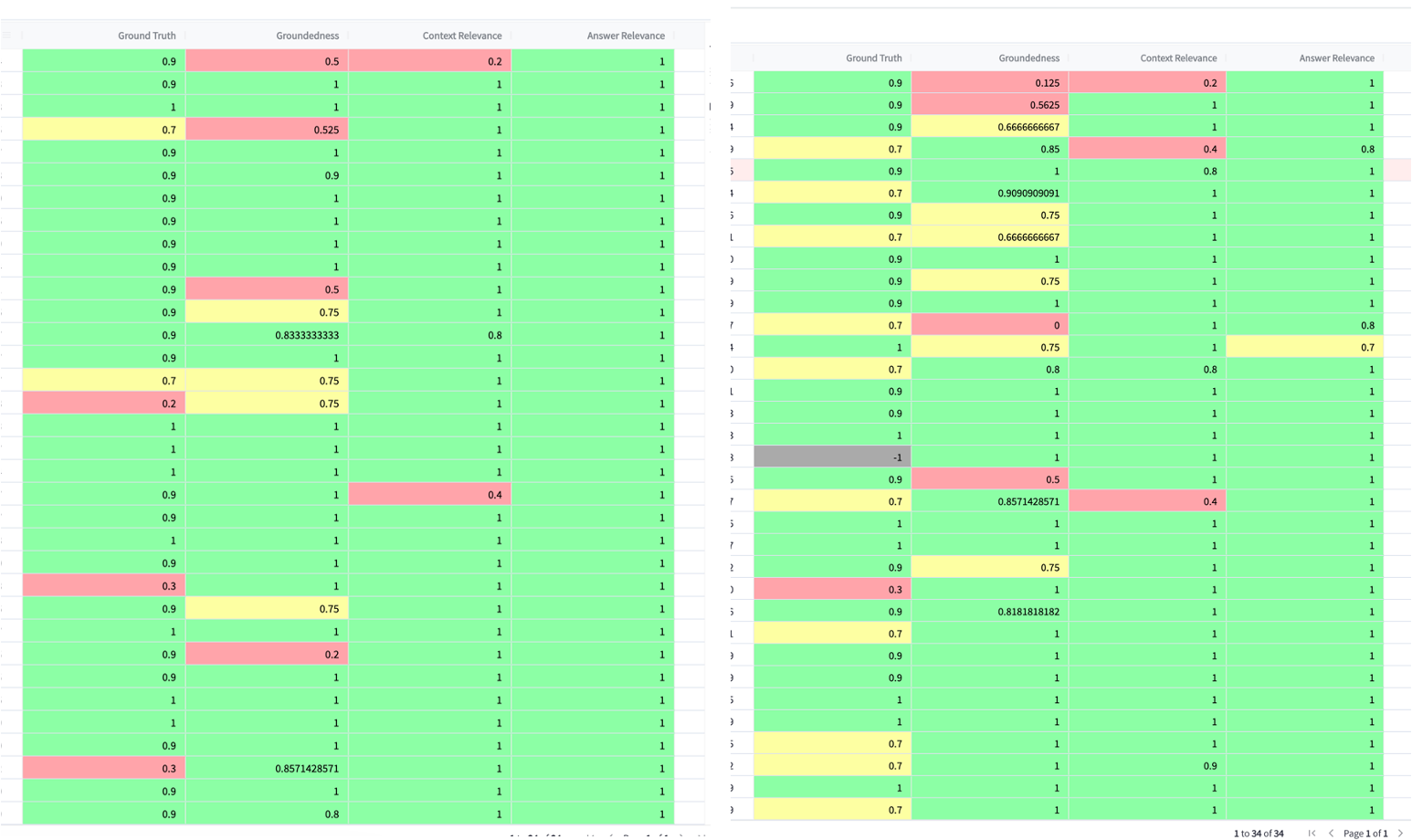
【Trulens框架】用TruLens 自动化 RAG 应用项目评估测试
前言: 什么是Trulens TruLens是面向神经网络应用的质量评估工具,它可以帮助你使用反馈函数来客观地评估你的基于LLM(语言模型)的应用的质量和效果。反馈函数可以帮助你以编程的方式评估输入、输出和中间结果的质量,从而…...
互联网线上融合上门洗衣洗鞋小程序,让洗衣洗鞋像点外卖一样简单
随着服务创新的风潮,众多商家已巧妙融入预约上门洗鞋新风尚,并携手洗鞋小程序,开辟线上蓝海。那么,这不仅仅是一个小程序,它究竟蕴含着哪些诱人好处呢? 1. 无缝融合,双线共赢:小程序…...

R语言绘制三维散点图
之前我们绘制的属于二维散点图,具有两个维度通常是 x 轴和 y 轴)上展示数据点的分布。只能呈现两个变量之间的关系。而三维散点图则具有三个维度(x 轴、y 轴和 z 轴)上展示数据点的分布。可以同时呈现三个变量之间的关系ÿ…...

2014年国赛高教杯数学建模A题嫦娥三号软着陆轨道设计与控制策略解题全过程文档及程序
2014年国赛高教杯数学建模 A题 嫦娥三号软着陆轨道设计与控制策略 嫦娥三号于2013年12月2日1时30分成功发射,12月6日抵达月球轨道。嫦娥三号在着陆准备轨道上的运行质量为2.4t,其安装在下部的主减速发动机能够产生1500N到7500N的可调节推力,…...

QD1-P25 CSS 背景
本节学习:CSS 背景属性 本节视频 https://www.bilibili.com/video/BV1n64y1U7oj?p25 背景颜色 背景图片 不重复 横向重复 纵向重复 双向重复 背景图片大小 400px 600px 原图大小 显示器宽度不够时&…...

《Linux运维总结:基于ARM64+X86_64架构CPU使用docker-compose一键离线部署mongodb 7.0.14容器版分片集群》
总结:整理不易,如果对你有帮助,可否点赞关注一下? 更多详细内容请参考:《Linux运维篇:Linux系统运维指南》 一、部署背景 由于业务系统的特殊性,我们需要面向不通的客户安装我们的业务系统&…...
)
Java利用ChromeDriver插件网页截图(Wondows版+Linux版)
chromedriver是谷歌浏览器驱动,用来模拟谷歌运行操作的一个工具,此处主要讲解Java后端利用此插件进行网页截图,并且适配Linux部署。 环境准备 Wondows服务器或电脑 本机需安装Chrome谷歌浏览器,根据本机浏览器版本,下载对应的chr…...

无人机之交互系统篇
一、系统构成 无人机交互系统通常由多个子系统组成,包括但不限于: 多模式人机交互装置:这是人机交互系统的基础层,通常包括计算机、局域网、传感器等设备,用于实现操作员与无人机之间的数据交互和指令传递。例如&…...

MarsCode--找出数字比例超过n/2的【简单】
问题描述 给定一个长度为n的整型数组,已知其中一个数字的出现次数超过数组长度的一半,找出这个元素 输入格式 一个长度为n的数组,其中某个元素的出现次数大于n/2 输出格式 一个整数 输入样例 [1,3,8,2,3,1,3,3,3] 输出样例 3 数据范…...

Python网络爬虫快速入门指南
Python网络爬虫快速入门指南 网络爬虫,也称为网络蜘蛛,是一种自动访问互联网并提取信息的程序。Python因其简洁明了的语法和丰富的库支持,成为开发网络爬虫的理想选择。在这篇博客中,我们将探讨如何快速入门Python网络爬虫技术&a…...

制造业数字鸿沟的终结者:零依赖STL到STEP转换引擎的技术突破与应用实践
制造业数字鸿沟的终结者:零依赖STL到STEP转换引擎的技术突破与应用实践 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 在数字化制造与工业4.0的浪潮中,制造业企业面临着…...
实战:从零部署企业级WEB前后端项目)
TongWEB(东方通)实战:从零部署企业级WEB前后端项目
1. 环境准备:银河麒麟系统下的基础搭建 在银河麒麟桌面系统V10(SP1)兆芯版上部署企业级WEB项目,环境准备是第一步。我遇到过不少开发者直接跳过环境检查就急着部署,结果浪费大量时间排查兼容性问题。这里分享几个关键点: 首先是系…...

暗黑3鼠标宏终极指南:D3KeyHelper 5步配置法快速上手
暗黑3鼠标宏终极指南:D3KeyHelper 5步配置法快速上手 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper D3KeyHelper是一款专为暗黑破坏神3玩…...

Hitboxer终极指南:专业级游戏键盘重映射与SOCD清理工具完全教程
Hitboxer终极指南:专业级游戏键盘重映射与SOCD清理工具完全教程 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd Hitboxer是一款专为竞技游戏玩家设计的专业级键盘按键重映射和SOCD清理工具ÿ…...

【CH32V307实战】4P OLED屏I2C驱动移植与快速显示指南
1. CH32V307与4P OLED屏的硬件连接指南 第一次拿到CH32V307开发板和4P OLED屏时,最让我头疼的就是接线问题。这种4线制OLED(通常标注为4P或4PIN)相比传统的7线制简化了不少,但引脚定义各家厂商可能略有差异。经过多次实测…...

Seraphine:英雄联盟智能BP助手与战绩查询工具完整指南
Seraphine:英雄联盟智能BP助手与战绩查询工具完整指南 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 在英雄联盟的对局中,BP(禁选英雄)阶段往往是决定胜负的关…...

开源技能库构建指南:Git+Markdown+Docsify打造个人技术知识体系
1. 项目概述:一个开源技能库的诞生与价值在技术领域,尤其是软件开发、运维和数据分析等方向,我们每天都在与海量的工具、框架和命令打交道。时间一长,一个很现实的问题就摆在了面前:那些曾经花了好几个小时才调通的复杂…...

【ElevenLabs情绪模拟技术白皮书】:基于2,147小时情感语音标注数据集的11类基础情绪迁移模型验证报告
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs情绪模拟技术白皮书概述 ElevenLabs的情绪模拟技术并非简单调节音高或语速,而是基于多模态情感表征学习(Multimodal Affective Representation Learning, MARL&#x…...

Vim-ai插件深度指南:在Vim中无缝集成AI提升开发效率
1. 项目概述:当Vim遇上AI,一场编辑器生产力的革命如果你和我一样,是个在终端里泡了十多年的老Vim用户,那你一定经历过这样的场景:面对一个复杂的函数重构,手指在键盘上飞舞,:s、%s、宏录制轮番上…...
基于CircuitPython与NeoPixel打造可编程LED亚克力灯牌:从硬件选型到代码实现
1. 项目概述:打造你的专属可编程光之铭牌在创客和电子爱好者的世界里,总有一些项目能完美地融合软件编程的灵活性与硬件制作的实体成就感。今天要分享的,就是这样一个让我爱不释手的小玩意儿:一个基于CircuitPython和NeoPixel的可…...