基于深度学习的基于视觉的机器人导航
基于深度学习的视觉机器人导航是一种通过深度学习算法结合视觉感知系统(如摄像头、LiDAR等)实现机器人在复杂环境中的自主导航的技术。这种方法使机器人能够像人类一样使用视觉信息感知环境、规划路径,并避开障碍物。与传统的导航方法相比,深度学习模型能够在动态环境中表现出更强的适应能力和鲁棒性。
1. 视觉导航的基本概念
视觉导航是指通过处理机器人的摄像头等视觉传感器采集到的图像数据,构建环境模型,进而进行路径规划和导航控制。深度学习在其中的应用,可以通过端到端学习的方法,将感知、决策与控制结合起来,实现更加智能和自主的导航系统。
关键任务:
- 环境感知:机器人通过摄像头等视觉传感器获取环境的图像或点云数据,提取场景中的关键信息,如障碍物、地标和目标物体的位置等。
- 地图构建与定位:通过视觉信息构建周围环境的地图,同时进行机器人自身的定位,通常使用视觉同时定位与建图(Visual SLAM)技术。
- 路径规划与避障:在感知和地图构建的基础上,规划机器人从当前位置到目标位置的最优路径,并在运动过程中避免碰撞障碍物。
- 导航控制:根据规划的路径控制机器人的运动,包括速度、方向和姿态调整。
2. 深度学习在视觉导航中的作用
深度学习在视觉导航中的应用主要体现在环境感知、特征提取和路径规划上,能够提升导航的智能性和适应性。常用的深度学习技术包括卷积神经网络(CNN)、循环神经网络(RNN)、生成对抗网络(GAN)等。
应用场景:
-
视觉感知与目标检测:利用深度学习的卷积神经网络(CNN)从摄像头捕获的图像中提取特征,用于识别道路、障碍物、行人、车辆等目标。通过训练深度模型,机器人可以自动识别重要的环境元素,从而进行更加精确的路径规划。
-
同时定位与建图(SLAM):传统的SLAM技术使用特征匹配等方法处理视觉信息,而深度学习方法则通过自动学习特征提取和匹配,实现更高效、更精确的定位与建图。例如,使用深度学习方法进行视觉-惯性SLAM(VIO),将摄像头与惯性传感器结合,提高系统的鲁棒性。
-
深度强化学习:深度强化学习(Deep Reinforcement Learning, DRL)在导航任务中的应用非常广泛。通过在模拟环境中训练,机器人可以学会如何在复杂环境中自主规划路径,并基于视觉反馈进行调整和优化。例如,Deep Q-Network(DQN)可以用于学习机器人如何在未知环境中避开障碍物。
-
端到端导航学习:深度学习还可以实现从原始图像数据到机器人动作的端到端学习,不需要人工设计中间特征和规则。通过深度卷积神经网络(CNN)和循环神经网络(RNN),机器人可以通过大量数据训练,直接从视觉输入生成导航控制命令。
3. 关键技术
-
卷积神经网络(CNN):用于从图像数据中自动提取空间特征,是视觉感知和目标识别的核心技术。常见的模型包括ResNet、VGG等,能够准确识别环境中的障碍物和路径。
-
视觉SLAM(vSLAM):通过视觉信息进行定位和地图构建。传统的SLAM技术依赖于几何特征匹配,深度学习引入的vSLAM通过学习更具鲁棒性的特征,减少了噪声和动态环境对定位的影响。
-
深度强化学习(DRL):通过与环境的不断交互,学习最优的导航策略。在模拟器中,机器人通过视觉反馈进行试验,学会避开障碍物并找到最优路径。
-
生成对抗网络(GAN):用于生成虚拟场景和训练数据,可以提高导航系统在不同环境中的泛化能力。
4. 典型应用场景
-
无人驾驶汽车:无人驾驶汽车通过摄像头和激光雷达采集环境数据,利用深度学习模型识别道路标志、行人、车辆和其他障碍物,规划行驶路径并实时做出避障决策。
-
仓储机器人:在智能仓储中,机器人通过视觉感知货架、通道和其他障碍物,使用深度学习算法规划最优路径,实现物品的自主运输和存储。
-
无人机导航:无人机通过视觉传感器进行环境感知,在动态环境中执行自主飞行任务,如目标跟踪、送货、救援等。深度学习模型能够提升无人机的避障能力和导航精度。
-
服务机器人:家庭或商业环境中的服务机器人可以通过视觉信息进行室内导航,避开家具、人员等障碍物,完成自主清扫、递送物品等任务。
5. 面临的挑战
-
复杂环境感知与建图:在复杂动态环境中,实时建图和感知仍是难点,特别是处理高维视觉数据时,如何保证系统的实时性和鲁棒性是一个挑战。
-
模型泛化性与数据依赖:深度学习模型在训练数据不足或环境变化较大的情况下,可能会出现泛化能力不足的问题,导致导航性能下降。
-
计算资源限制:视觉导航需要处理大量视觉数据和深度学习计算,如何在资源有限的机器人平台上实现高效运行是一个关键问题。
6. 未来发展方向
-
边缘计算与轻量化模型:为了在嵌入式系统中实现深度学习的实时应用,未来的研究方向将包括边缘计算与深度学习模型的轻量化设计。通过量化、剪枝等技术,减小模型的计算开销。
-
多模态感知融合:除了视觉数据外,未来机器人导航将整合多模态感知数据,如声音、触觉、雷达等,进一步提升导航的精度和鲁棒性。
-
自主学习与自适应性:随着深度强化学习的发展,机器人将具备更强的自适应能力,能够在陌生或极端环境中自主学习导航策略,逐步摆脱对预先训练数据的依赖。
7. 实际案例
-
谷歌自动驾驶汽车项目(Waymo):谷歌的Waymo项目利用视觉传感器和深度学习模型,实现了在复杂道路环境中的自主驾驶能力。通过识别交通信号、行人、车辆等信息,进行实时路径规划和避障。
-
亚马逊Kiva机器人:亚马逊仓储中的Kiva机器人通过视觉导航和深度学习,实现了仓库中的自动化物品搬运。在复杂的仓库布局中,Kiva机器人能够自主避开其他机器人和障碍物,高效完成运输任务。
结论
基于深度学习的视觉机器人导航通过将深度学习与视觉感知结合,赋予了机器人在复杂动态环境中自主导航的能力。这一技术不仅提升了机器人系统的智能化水平,还在无人驾驶、智能仓储、服务机器人等多个领域得到了广泛应用。未来,随着算法优化和硬件技术的进步,视觉导航将在更多领域发挥作用。
相关文章:

基于深度学习的基于视觉的机器人导航
基于深度学习的视觉机器人导航是一种通过深度学习算法结合视觉感知系统(如摄像头、LiDAR等)实现机器人在复杂环境中的自主导航的技术。这种方法使机器人能够像人类一样使用视觉信息感知环境、规划路径,并避开障碍物。与传统的导航方法相比&am…...
)
苍穹外卖学习笔记(二十三)
拒单 OrderController /*** 拒单*/PutMapping("/rejection")ApiOperation("拒单")public Result rejection(RequestBody OrdersRejectionDTO ordersRejectionDTO) throws Exception {orderService.rejection(ordersRejectionDTO);return Result.success(…...

vLLM 推理引擎性能分析基准测试
文章目录 分析步骤案例案例描述测试数据集 原始数据〇轮测试(enable-64)一轮测试(enable-128)二轮测试(enable-256)三轮测试(enable-512)四轮测试(enable-2048࿰…...

图像增强论文精读笔记-Kindling the Darkness: A Practical Low-light Image Enhancer(KinD)
1. 论文基本信息 论文标题:Kindling the Darkness: A Practical Low-light Image Enhancer 作者:Yonghua Zhang等 发表时间和期刊:2019;ACM MM 论文链接:https://arxiv.org/abs/1905.04161 2. 研究背景和动机 现有…...

HALCON数据结构之字符串
1.1 String字符串的基本操作 *将数字转换为字符串或修改字符串 *tuple_string (T, Format, String) //HALCON语句 *String: T $ Format //赋值操作*Format string 由以下四个部分组成: *<flags><field width>.<precision><conversion 字符&g…...

string模拟优化和vector使用
1.简单介绍编码 utf_8变长编码,常用英文字母使用1个字节,对于其它语言可能2到14,大部分编码是utf_8,char_16是编码为utf_16, char_32是编码为utf_32, wchar_t是宽字符的, utf_16是大小为俩个字节&a…...

Go-知识依赖GOPATH
Go-知识依赖GOPATH 1. 介绍2. GOROOT 是什么3. GOPATH 是什么4. 依赖查找5. GOPATH 的缺点1. 介绍 早期Go语言单纯地使用GOPATH管理依赖,但是GOPATH不方便管理依赖的多个版本,后来增加了vendor,允许把项目依赖 连同项目源码一同管理。Go 1.11 引入了全新的依赖管理工具 Go …...

PyTorch 中 reshape 函数用法示例
PyTorch 中 reshape 函数用法示例 在 PyTorch 中,reshape 函数用于改变张量的形状,而不改变其中的数据。下面是一些关于 reshape 函数的常见用法示例。 基本语法 torch.reshape(input, shape) # input: 要重塑的张量。 # shape: 目标形状࿰…...

安全光幕的工作原理及应用场景
安全光幕是一种利用光电传感技术来检测和响应危险情况的先进设备。其工作原理基于红外线传感器,通过发射红外光束并接收反射或透射光束来形成一道无形的屏障。以下是对安全光幕工作原理和应用场景的介绍: 工作原理 发射器与接收器:安全光幕通…...

《深度学习》OpenCV LBPH算法人脸识别 原理及案例解析
目录 一、LBPH算法 1、概念 2、实现步骤 3、方法 1)步骤1 • 缩放 • 旋转和平移 2)步骤2 二、案例实现 1、完整代码 1)图像内容: 2)运行结果: 一、LBPH算法 1、概念 在OpenCV中,L…...

数据结构之顺序表——动态顺序表(C语言版)
静态顺序表我们已经实现完毕了,下来我们实现一下动态顺序表 静态链接:数据结构之顺序表——动态顺序表(C语言版) 首先来了解一下两个顺序表的差别 一、内存管理的灵活性 动态分配与释放:动态顺序表能够在运行时根据需要动态地分配和释放内存…...

Python 网络爬虫入门与实战
目录 1 引言 2 网络爬虫基础知识 2.1 什么是网络爬虫 2.2 爬虫的工作原理 2.3 爬虫的应用场景 3 Python 爬虫环境搭建 3.1 安装 Python 3.2 安装必要的库 4 使用 Requests 库进行基本爬虫 4.1 发送 GET 请求 4.2 发送 POST 请求 4.3 处理响应 5 使用 BeautifulSoup…...

成都睿明智科技有限公司电商服务可靠不?
在这个短视频风起云涌的时代,抖音不仅成为了人们娱乐消遣的首选平台,更是众多商家竞相追逐的电商新蓝海。成都睿明智科技有限公司,作为抖音电商服务领域的佼佼者,正以其独到的洞察力和专业的服务,助力无数品牌在这片沃…...

fmql之Linux Uart
正点原子第48章。 串口收发测试 正点原子教程 RS232和RS485的串口收发测试是一样的。 // 设置串口波特率为115200 stty -F /dev/ttyPS1 ispeed 115200 ospeed 115200 cs8// 发送字符串 echo "www.openedv.com" >/dev/ttyPS1// 接收数据 cat /dev/ttyPS1 fmql测…...

【火山引擎】调用火山大模型的方法 | SDK安装 | 配置 | 客户端初始化 | 设置
豆包 (Doubao) 是字节跳动研发的大规模预训练语言模型。 目录 1 安装 2 配置访问凭证 3 客户端初始化 4 设置地域和访问域名 5 设置超时/重试次数 1 安装 通过pip安装PYTHON SDK。 pip install volcengine-python-sdk[ark] 2 配置访问凭证 获取 API Key 访问凭证具体步…...
前端实现下载功能汇总(下载二进制流文件、数组下载成csv、将十六进制下载成pcap、将文件下载成zip)
前言:汇总一下做过的下载功能,持续补充中 一、将后端传过来的二进制流文件下载(需要提取headers里面的文件名) const { herders,data }res; // 创建下载链接元素 const link document.createElement("a");// 创建 Bl…...
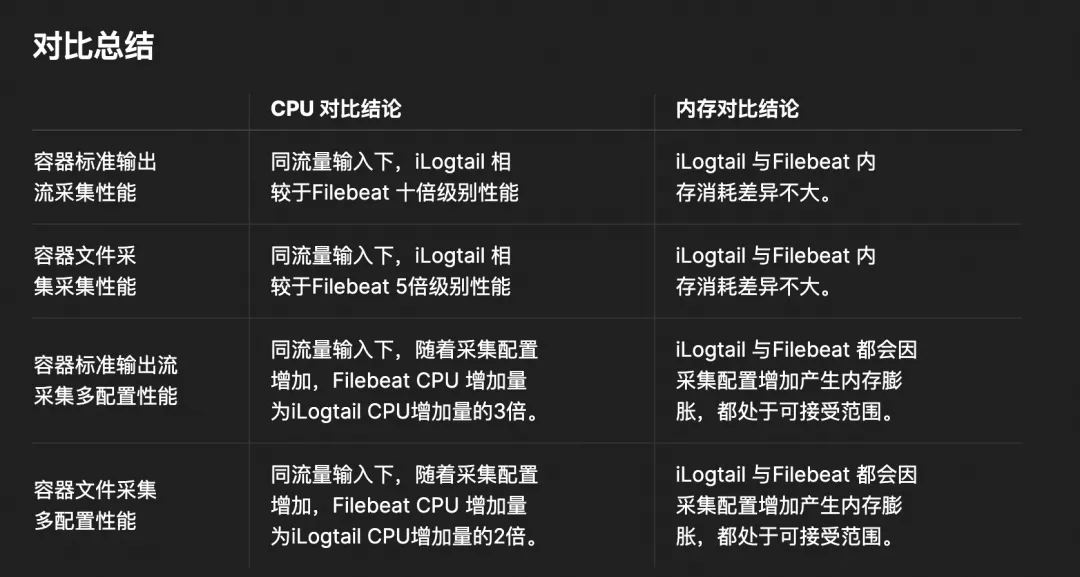
iLogtail 开源两周年:UC 工程师分享日志查询服务建设实践案例
作者:UC 浏览器后端工程师,梁若羽 传统 ELK 方案 众所周知,ELK 中的 E 指的是 ElasticSearch,L 指的是 Logstash,K 指的是 Kibana。Logstash 是功能强大的数据处理管道,提供了复杂的数据转换、过滤和丰富…...

【MySQL】入门篇—基本数据类型:NULL值的概念
在关系数据库中,NULL值是一个特殊的标记,表示缺失或未知的值。 NULL并不等同于零(0)或空字符串(),它表示一个字段没有任何值。 这一概念在数据库设计和数据管理中至关重要,因为它影…...

Java设计模式10 - 观察者模式
观察者模式 观察者模式也叫作发布-订阅模式,也就是事件监听机制。观察者模式定义了一种一对多的依赖关系,让多个观察者对象同时监听某一个主题对象,这个主题对象在状态上发生变化时,会通知所有观察者对象,使他们能够自…...
LabVIEW示波器通信及应用
基于LabVIEW平台开发的罗德与施瓦茨示波器通信与应用系统实现了示波器的远程控制及波形数据的实时分析,通过TCP/IP或USB接口与计算机通信,利用VISA技术进行指令传输,从而实现高效的数据采集与处理功能。 项目背景 随着现代电子测试需求的日益…...

四旋翼变形控制:RL与MPC在混合动力学中的对比
1. 四旋翼变形控制的技术挑战与解决方案四旋翼变形控制(Quadrotor Morpho-Transition)是当前机器人领域最具挑战性的前沿技术之一。这项技术使机器人能够在空中完成形态变换,实现从飞行模式到地面模式的平滑切换。想象一下,一架四…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

适合地产人用的中介房源管理系统
在房产经纪行业,房源管理与客源管理是经纪人日常工作的核心,直接影响业务效率与成交转化。选择一套适配行业需求的中介房源管理系统,能帮助中介团队规范流程、降低运营成本、大幅提升业绩。今天我们以客观视角,详细解析全房源系统…...

别再死记硬背Payload了!我用XSS-Game靶场,带你拆解18种过滤规则背后的绕过逻辑
从XSS-Game靶场实战中掌握18种过滤规则的逆向思维在网络安全领域,跨站脚本攻击(XSS)始终是Web应用面临的主要威胁之一。许多开发者虽然了解XSS的基本概念,但当面对各种复杂的过滤规则时,往往不知如何系统分析并构造有效…...
)
ThinkPad开机报错0183/0253?别慌,手把手教你搞定EFI变量错误(附BIOS重置教程)
ThinkPad开机报错0183/0253?EFI变量错误全面解决方案当你按下ThinkPad的电源键,期待熟悉的开机画面时,屏幕上却突然跳出一串神秘代码——"0183: Bad CRC of Security Settings in EFI Variable"或"0253: EFI Variable Block D…...

SSE 基础知识
SSE 基础知识 一、概念定义 SSE 全称 Server-Sent Events,是基于HTTP协议的服务器单向数据推送技术。 建立一次长连接后,服务端可主动持续向前端推送数据,无需客户端反复轮询请求。 二、核心特点 单向通信:仅服务器 → 客户端发送…...

三十岁想从零转行现实吗?带你分辨真正有前景的好工作
我是29岁那年,完成从转行裸辞副业的职业转型。 如果你把职业生涯看成是从现在开始30岁,到你退休那年,中间这么漫长的30年,那么30岁转行完全来得及…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...

AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了
AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了2026年真正值得重视的AI底层能力,是让模型知道该信谁 你有没有发现一个很扎心的变化。 以前我们用AI,最怕它不会。 现在我们用AI,最怕它太会了。 它能写…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...