《案例》—— OpenCV 实现2B铅笔填涂的答题卡答案识别
文章目录
- 一、案例介绍
- 二、代码解析
一、案例介绍
- 下面是一张使用2B铅笔填涂选项后的答题卡

- 使用OpenCV 中的各种方法进行真确答案识别,最终将正确填涂的答案用绿色圈出,错误的答案不圈出,用红色圈出错误题目的正确答案
- 最终统计正确的题目数量,并在答题卡的左上角写出分数
- 最终的结果图如下:

二、代码解析
-
先直接上完整代码:
import numpy as np import cv2""" 定义显示图片的函数 """def cv_show(name, img):cv2.imshow(name, img)cv2.waitKey(0)""" 寻找透视变换时的四个近似轮廓的顶点 """def order_points(pts):# 一共4个坐标rect = np.zeros((4, 2), dtype="float32")s = pts.sum(axis=1)rect[0] = pts[np.argmin(s)]rect[2] = pts[np.argmax(s)]diff = np.diff(pts, axis=1)rect[1] = pts[np.argmin(diff)]rect[3] = pts[np.argmax(diff)]return rect""" 图像透视变换函数 """def four_point_transform(image, pts):# 获取输入坐标点rect = order_points(pts)(tl, tr, br, bl) = rect# 计算输入的w和h值widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))maxWidth = max(int(widthA), int(widthB))heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))maxHeight = max(int(heightA), int(heightB))# 变换后对应坐标位置dst = np.array([[0, 0], [maxWidth - 1, 0], [maxWidth - 1, maxHeight - 1], [0, maxHeight - 1]], dtype="float32")M = cv2.getPerspectiveTransform(rect, dst)warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))return warped""" 轮廓排序函数 """def sort_contours(cnts, method='left-to-right'):reverse = Falsei = 0if method == 'right-to-left' or method == 'bottom-to-top':reverse = Trueif method == 'top-to-bottom' or method == 'bottom-to-top':i = 1boundingBoxes = [cv2.boundingRect(c) for c in cnts](cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),key=lambda b: b[1][i], reverse=reverse))# zip(*...)使用星号操作符解包排序后的元组列表,并将其重新组合成两个列表:一个包含所有轮廓,另一个包含所有边界框。return cnts, boundingBoxesANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1} # 正确答案""" 图片预处理 """ image = cv2.imread('images/test_01.png') # 读取答题卡图片 contours_img = image.copy() # 复制一个原图为了后续的步骤在其上操作 gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转换为灰度图 """ 高斯滤波 去除图片中的噪声点 """ blurred = cv2.GaussianBlur(gray, (5, 5), 0) cv_show('blurred', blurred) # 提前定义好的用于显示图片的函数 cv_show """ 边缘检测 """ edged = cv2.Canny(blurred, 75, 200) cv_show('edged', edged) """ 轮廓检测 """ cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] cv2.drawContours(contours_img, cnts, -1, (0, 0, 255), 3) cv_show('contours_img', contours_img)""" 图像透视变换 --> 将答题卡区域提取出来 """ docCnt = None # 根据轮廓大小进行排序,准备透视变换 cnts = sorted(cnts, key=cv2.contourArea, reverse=True) # 将检测到的答题卡轮廓进行排序,其实只有一个轮廓,为了提高代码的可行性 for c in cnts:peri = cv2.arcLength(c, True) # 计算答题卡区域轮廓的面积approx = cv2.approxPolyDP(c, 0.02 * peri, True) # 轮廓近似if len(approx) == 4:docCnt = approxbreak# 执行透视变换 warped_t = four_point_transform(image, docCnt.reshape(4, 2)) # 提前定义好的图像透视变换函数 four_point_transform warped_new = warped_t.copy() cv_show('warped', warped_t) # 转换为灰度图 warped = cv2.cvtColor(warped_t, cv2.COLOR_BGR2GRAY) # 转换为二值图片,非黑即白 thresh = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1] cv_show('thresh', thresh) thresh_Contours = thresh.copy()""" 对答题卡中的每一个答案选项区域进行处理 """# 找到每一个圆圈轮廓 cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] warped_Contours = cv2.drawContours(warped_t, cnts, -1, (0, 255, 0), 1) cv_show('warped_Contours', warped_Contours)questionCnts = [] # 用于存储正确的答案选项的轮廓 for c in cnts: # 遍历轮廓并计算比例和大小# 计算每个轮廓的外接矩阵的左上角坐标(x, y), 以及宽w高h的大小(x, y, w, h) = cv2.boundingRect(c)ar = w / float(h)# 根据实际情况制定标准if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:questionCnts.append(c)""" 将每个答案的轮廓按照答题卡上的顺序正确排序后,与正确答案进行比较 """ # 先按照从上到下排序 questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0] # 提前定义好的轮廓排序函数 sort_contourscorrect = 0 # 对每题的五个选项进行循环处理,并与正确答案进行比较 for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):# 在按照从左到右排序cnts = sort_contours(questionCnts[i:i + 5])[0]bubbled = None# 遍历每一个选项for (j, c) in enumerate(cnts):# 使用mask掩膜来判断结果mask = np.zeros(thresh.shape, dtype="uint8")cv2.drawContours(mask, [c], -1, 255, -1)cv_show('mask', mask)# 通过计算非零点数量来算是否选择这个答案# 利用掩膜(mask)进行”与“操作,只保留mask位置中的内容thresh_mask_and = cv2.bitwise_and(thresh, thresh, mask=mask)cv_show('thresh_mask_and', thresh_mask_and)total = cv2.countNonZero(thresh_mask_and) # 统计像素值不为0的像素数if bubbled is None or total > bubbled[0]: # 通过阈值判断,保存灰度值最大的序号bubbled = (total, j)# 对比正确答案color = (0, 0, 255)k = ANSWER_KEY[q]if k == bubbled[1]: # 判断正确color = (0, 255, 0)correct += 1 # 统计正确的题目# 画出正确答案的轮廓cv2.drawContours(warped_new, [cnts[k]], -1, color, 3)cv_show('warped_new', warped_new)""" 统计得分,并在答题卡的左上角写上分数 """ score = (correct / 5.0) * 100 print("[INFO] score: {}分".format(score)) cv2.putText(warped_new, "{}".format(score), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2) cv2.imshow("Original", image) cv2.imshow("Exam", warped_new) cv2.waitKey(0) -
步骤解析:
-
首先将每一题的正确答案的索引号与每一题的索引号对应上 ,以一个字典的形式保存在一个变量中
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1} -
1.图片预处理
- 图像边缘检测的介绍:https://blog.csdn.net/weixin_73504499/article/details/141832066?spm=1001.2014.3001.5501
- 图像轮廓检测的介绍:https://blog.csdn.net/weixin_73504499/article/details/141873522?spm=1001.2014.3001.5501
image = cv2.imread('images/test_01.png') # 读取答题卡图片 contours_img = image.copy() # 复制一个原图为了后续的步骤在其上操作 gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转换为灰度图 """ 高斯滤波 去除图片中的噪声点 """ blurred = cv2.GaussianBlur(gray, (5, 5), 0) cv_show('blurred', blurred) # 提前定义好的用于显示图片的函数 cv_show """ 边缘检测 """ edged = cv2.Canny(blurred, 75, 200) cv_show('edged', edged) """ 轮廓检测 """ cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] cv2.drawContours(contours_img, cnts, -1, (0, 0, 255), 3) cv_show('contours_img', contours_img)- 效果如下:

-
2.将答题卡区域提取出来(图像透视变换),并进行处理
- 透视变换的两个关键函数的解析:https://blog.csdn.net/weixin_73504499/article/details/142864082?spm=1001.2014.3001.5501
""" 图像透视变换 --> 将答题卡区域提取出来 """ docCnt = None # 根据轮廓大小进行排序,准备透视变换 cnts = sorted(cnts, key=cv2.contourArea, reverse=True) # 将检测到的答题卡轮廓进行排序,其实只有一个轮廓,为了提高代码的可行性 for c in cnts:peri = cv2.arcLength(c, True) # 计算答题卡区域轮廓的面积approx = cv2.approxPolyDP(c, 0.02 * peri, True) # 轮廓近似if len(approx) == 4:docCnt = approxbreak# 执行透视变换 warped_t = four_point_transform(image, docCnt.reshape(4, 2)) # 提前定义好的图像透视变换函数 four_point_transform warped_new = warped_t.copy() cv_show('warped', warped_t) # 转换为灰度图 warped = cv2.cvtColor(warped_t, cv2.COLOR_BGR2GRAY) # 转换为二值图片,非黑即白 thresh = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1] cv_show('thresh', thresh) thresh_Contours = thresh.copy()- 结果如下:

-
3.对答题卡中的每一个答案选项区域进行处理
# 找到每一个圆圈轮廓 cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] warped_Contours = cv2.drawContours(warped_t, cnts, -1, (0, 255, 0), 1) cv_show('warped_Contours', warped_Contours)questionCnts = [] # 用于存储正确的答案选项的轮廓 for c in cnts: # 遍历轮廓并计算比例和大小# 计算每个轮廓的外接矩阵的左上角坐标(x, y), 以及宽w高h的大小(x, y, w, h) = cv2.boundingRect(c)ar = w / float(h)# 根据实际情况制定标准if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:questionCnts.append(c)- 结果如下:

- 结果如下:
-
4.将每个答案的轮廓按照答题卡上的顺序正确排序后,与正确答案进行比较
# 先按照从上到下排序 questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0] # 提前定义好的轮廓排序函数 sort_contourscorrect = 0 # 对每题的五个选项进行循环处理,并与正确答案进行比较 for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):# 在按照从左到右排序cnts = sort_contours(questionCnts[i:i + 5])[0]bubbled = None# 遍历每一个选项for (j, c) in enumerate(cnts):# 使用mask掩膜来判断结果mask = np.zeros(thresh.shape, dtype="uint8")cv2.drawContours(mask, [c], -1, 255, -1)cv_show('mask', mask)# 通过计算非零点数量来算是否选择这个答案# 利用掩膜(mask)进行”与“操作,只保留mask位置中的内容thresh_mask_and = cv2.bitwise_and(thresh, thresh, mask=mask)cv_show('thresh_mask_and', thresh_mask_and)total = cv2.countNonZero(thresh_mask_and) # 统计像素值不为0的像素数if bubbled is None or total > bubbled[0]: # 通过阈值判断,保存灰度值最大的序号bubbled = (total, j)# 对比正确答案color = (0, 0, 255)k = ANSWER_KEY[q]if k == bubbled[1]: # 判断正确color = (0, 255, 0)correct += 1 # 统计正确的题目# 画出正确答案的轮廓cv2.drawContours(warped_new, [cnts[k]], -1, color, 3)cv_show('warped_new', warped_new)- 其中部分展示效果如下:


- 结果如下:

- 其中部分展示效果如下:
-
5.统计得分,并在答题卡的左上角写上分数
""" 统计得分,并在答题卡的左上角写上分数 """ score = (correct / 5.0) * 100 print("[INFO] score: {}分".format(score)) cv2.putText(warped_new, "{}".format(score), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2) cv2.imshow("Original", image) cv2.imshow("Exam", warped_new) cv2.waitKey(0)- 最终结果如下:

- 最终结果如下:
-
相关文章:
《案例》—— OpenCV 实现2B铅笔填涂的答题卡答案识别
文章目录 一、案例介绍二、代码解析 一、案例介绍 下面是一张使用2B铅笔填涂选项后的答题卡 使用OpenCV 中的各种方法进行真确答案识别,最终将正确填涂的答案用绿色圈出,错误的答案不圈出,用红色圈出错误题目的正确答案最终统计正确的题目数…...
新员工入职流程指南_完整入职流程解析
文章介绍了新员工入职流程的重要性、步骤及持续时间,并推荐ZohoPeople软件自动化管理入职流程,提升新员工入职体验,减少离职率,确保合规性,提升公司品牌形象。 一、新员工入职流程是怎样的? 入职流程是指一…...

mysql查看和修改默认配置
1.查看最大连接数 SELECT max_connections; 或者 SHOW VARIABLES LIKE max_connections;2.查看当前连接的客户端 SHOW PROCESSLIST;2.临时设置最大连接数 SET GLOBAL max_connections 500;3.临时设置连接客户端交互超时时间 SET GLOBAL interactive_timeout 1800;4.永久生…...

海外云手机:出海电商养号智能化方案
随着出海电商的迅猛发展,使用海外云手机进行养号已经成为越来越多商家的新选择。尤其在社交电商推广和短视频引流方面,海外云手机不仅提高了流量的精准度,还助力商家实现业务的快速增长。本文将探讨海外云手机养号相较于传统模式的优势&#…...
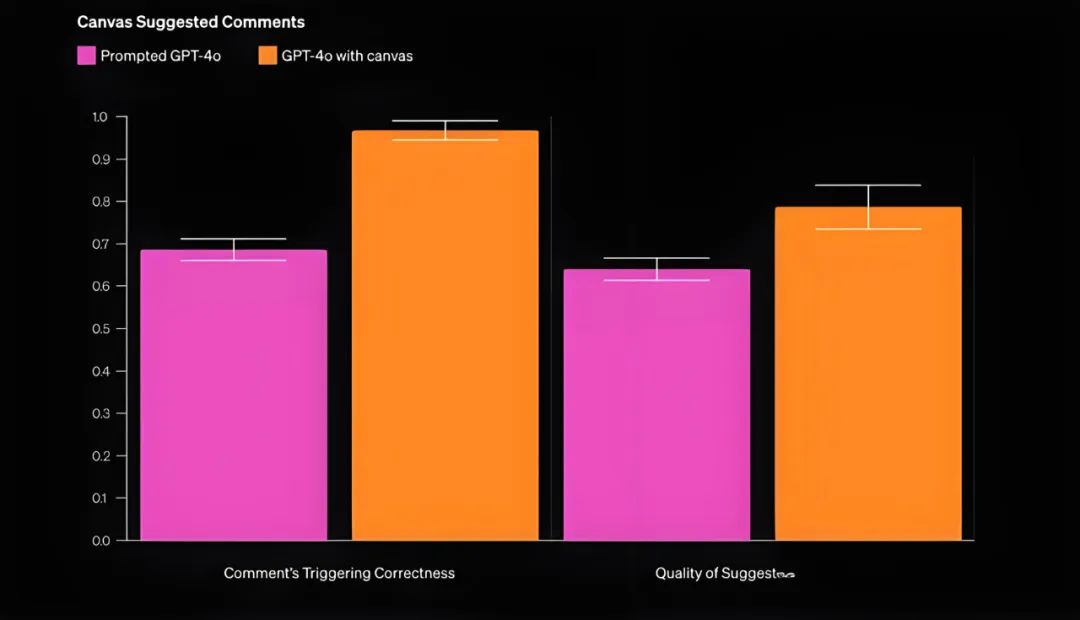
OpenAI Canvas用户反馈:并不如外界传言般“炸裂”,更不是“AGI的终极交互形态” | LeetTalk Daily...
“LeetTalk Daily”,每日科技前沿,由LeetTools AI精心筛选,为您带来最新鲜、最具洞察力的科技新闻。 Canvas作为一个独立的界面,通过与ChatGPT的结合来提升用户的协作能力和创作效率。尽管用户对其独立性与现有工具的整合存在不同…...

RiproV9.0主题wordpress主题免扩展可二开PJ版/WordPress博客主题Ripro全解密无后门版本
🔥🎉 全新RiPro9.0开源版发布 —— 探索无限可能🚀🌐 今天,我很高兴能与大家分享一个重磅资源——RiPro9.0开源版!这不是一个普通的版本,而是一个经过精心打磨、全面解密的力作。🔍…...

[LeetCode] 515. 在每个树行中找最大值
题目描述: 给定一棵二叉树的根节点 root ,请找出该二叉树中每一层的最大值。 示例1: 输入: root [1,3,2,5,3,null,9] 输出: [1,3,9]示例2: 输入: root [1,2,3] 输出: [1,3]提示: 二叉树的节点个数的范围是 [0,10…...

【分布式微服务云原生】《微服务架构大揭秘:流行框架与服务治理攻略》
标题:《微服务架构大揭秘:流行框架与服务治理攻略》 摘要:本文深入探讨了流行的微服务架构框架,包括 Spring Cloud、Docker Kubernetes、Dubbo、Service Mesh 和 Serverless 架构,详细介绍了它们的关键组件和服务治理…...

uniapp uni.uploadFile errMsg: “uploadFile:fail
uniapp 上传后一直显示加载中 1.检查前后端上传有无问题 2.检查失败信息 await uni.uploadFile({url,filePath,name,formData,header,timeout: 30000000, // 自定义上传超时时间fail: async function(err) {$util.hideAll()// 失败// err 返回 {errMsg: "uploadFile:fai…...

一个常见问题:TCP和UDP是否可以使用一个端口
TCP(传输控制协议)和UDP(用户数据报协议)做为两种被广泛使用的协议,它们在处理数据时采用不同的机制,那么有一个问题,在同一系统内,TCP和UDP的服务是否可以使用同一个端口呢…...
)
前端报错:‘vue-cli-service‘ 不是内部或外部命令,也不是可运行的程序(node_modules下载不下来)
原因:Vue CLI 没有被正确安装,或者其安装路径没有被添加到你的系统环境变量中。 一、确认 Vue CLI 是否已安装: 打开命令行工具(例如 CMD、PowerShell、Terminal),输入以下命令来检查 Vue CLI 是否已安装…...

白日门【鬼服无限刀】win服务端+安卓客户端+教程+GM后台
演示系统:Windows Server 2012 -------------------------------------------------------------------------------------------------------------------------- 把服务端上传解压缩到服务器D盘根目录:D:\【解压完成后检查路径是否正确:D:\】 安装基础运行环境&…...

如何迅速的了解一个人
目录 社会经济背景 生活满意度 爱心和同情心 如果你想迅速地了解一个人,问他问题是最快捷的方法。不论你是相亲、工作、而试、看医生还是为孩子找个学校,事先设计好你想提出的问题,想好你究竟要搜罗对方哪一方面的信息这样做会实现许多目…...

Window和Linux远程调度kettle
在windows和linux分别安装kettle,我的是pdi-ce-8.2.0.0-342版本,在windows中配置好之后,直接放到虚拟机的目录下 在cmd窗口中到kettle根目录下执行 (carte ip 端口 ),出现如下提示即启动成功 在远程端…...

设定义结构变量
在C语言中,可以使用struct关键字来定义结构变量。结构变量是由多个不同类型的成员变量组成的数据类型,可以在一个变量中存储多个相关的数据。 定义结构变量的语法如下: struct 结构名 {数据类型 成员1;数据类型 成员2;... };例如࿰…...

SSD |(七)FTL详解(中)
文章目录 📚垃圾回收🐇垃圾回收原理🐇写放大🐇垃圾回收实现🐇垃圾回收时机 📚解除映射关系📚磨损均衡 📚垃圾回收 🐇垃圾回收原理 ✋设定一个迷你SSD空间: 假…...

Swift 协议:深入解析与高级应用
Swift 协议:深入解析与高级应用 Swift 协议是 Swift 编程语言中的一项核心特性,它提供了一种定义接口和实现多态的强大方式。本文将深入探讨 Swift 协议的概念、用法和高级应用,帮助读者更好地理解和运用这一特性。 什么是 Swift 协议&…...

API项目3:API签名认证
问题引入 我们为开发者提供了接口,却对调用者一无所知 假设我们的服务器只能允许 100 个人同时调用接口。如果有攻击者疯狂地请求这个接口,那是很危险的。一方面这可能会损害安全性,另一方面耗尽服务器性能,影响正常用户的使用。…...

unity学习-Directional light光的设置
ccColor:环境光的颜色 Mode:灯光模式,Realtime(实时光影),实时计算光影,消耗性能但是效果好,Baked烘焙光影,将光的照射效果作为贴图贴在静态的物体上形成一种虚假的光照…...

简单实现通过电脑操作手机
通过电脑操作手机,支持单击,拖抓事件,延时有1-2秒。 具体步骤: 1、从手机截图到sdcard 2、将图片导出到PC 3、从PC加载展示图片 4、开启定时器 5、设置点击、滚动事件 1、 private static void takeScreenshot(String path)…...

UE5 BaseEditorSettings.ini加载原理与配置生效机制
1. 为什么你改了BaseEditorSettings.ini却没生效?——从UE5编辑器启动流程讲起很多人在UE5项目里折腾半天,把BaseEditorSettings.ini文件翻来覆去改了十几遍,重启编辑器后发现:缩放比例还是不对、网格间距没变、甚至“启用实时预览…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

iPaaS 应用场景深度解析:从系统孤岛到数据自由流动的六大实战路径
写在前面 一个企业的数字化程度越高,系统就越多。系统越多,集成问题就越严重。 这不是假设,而是我们在服务客户过程中反复验证的结论——企业数字化转型的瓶颈,往往不在于"造新系统",而在于"连老系统&q…...
)
Sora 2原生接入Unity 6.0:5步完成神经渲染管线嵌入,实测帧率提升47%(附GitHub认证插件)
更多请点击: https://kaifayun.com 第一章:Sora 2与Unity整合 Sora 2作为新一代AI视频生成引擎,其开放API设计天然支持与实时3D引擎的深度协同。Unity 2023.2版本通过URP(Universal Render Pipeline)与C# Job System提…...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...

Burp Suite拦截与替换机制深度解析:从协议层到规则链
1. 这不是“点开就能用”的功能,而是你和目标系统之间的一道可编程闸门很多人第一次在Burp Suite里点开Proxy → Intercept,看到HTTP请求被拦下来,兴奋地改个User-Agent、删个Cookie就点Forward,以为自己已经掌握了“拦截与替换”…...

OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心
OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心 【免费下载链接】OmenSuperHub Control Omen laptop performance, fan speeds, and keyboard lighting, and unlock power limits. 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为官方…...

输电线路在线监测系统|架空线路安全运行的“第一道防线“!
输电线路微气象监测站是专为高压输电线路、电网廊道、杆塔运维量身打造的专利级一体化微气象智能监测设备。依托双专利超声波探测技术、六要素集成传感架构、无启动风速高精测量、智能抗干扰稳控系统,实现输电线路沿线气象24小时全自动捕捉、动态实时监测、大风风险…...

别再盲调temperature=0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单
更多请点击: https://intelliparadigm.com 第一章:别再盲调temperature0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单 DeepSeek-R1/VL 等开源大模型在实际部署中,仅靠调节 temperature 往往收效甚…...
)
保姆级教程:手把手教你搞定ESXi 6.7安装前的BIOS设置(VT-x/VT-d/AES全开)
从零开始:ESXi 6.7安装前的BIOS设置终极指南当你第一次接触企业级虚拟化平台时,那种既兴奋又忐忑的心情我完全理解。作为过来人,我记得自己第一次在Dell PowerEdge服务器上安装ESXi时,光是搞清楚BIOS里那些晦涩的选项就花了整整一…...