【STM32 HAL库】MPU6050姿态解算 卡尔曼滤波
【STM32 HAL库】MPU6050姿态解算 卡尔曼滤波
- 前言
- MPU6050寄存器
- 代码详解
- mpu6050.c
- mpu6050.h
- 使用说明
前言
本篇文章基于卡尔曼滤波的原理详解与公式推导,来详细的解释下如何使用卡尔曼滤波来解算MPU6050的姿态
参考资料:Github_mpu6050
MPU6050寄存器
我们简单介绍下MPU6050驱动里设计到的寄存器,详情见MPU-60X0寄存器手册
Who Am I 寄存器
为数不多的默认值不为0的寄存器,其默认值为0x68,也即MPU6050的设备地址,通过读取该寄存器的值来判断识别到的设备是否是MPU6050

Power Management 1 寄存器
通过该寄存器配置电源模式、时钟源选择、设备复位和睡眠模式等功能。

Sample Rate Divider 寄存器
采样速率分频器,通过该寄存器设置分频系数,配置 MPU6050 数据输出速率。

CONFIGURATION 寄存器
有GYROSCOPE CONFIGURATION 和 ACCELEROMETER CONFIGURATION 寄存器,用来配置陀螺仪、加速度计参数

详情见MPU-60X0寄存器手册
MEASUREMENT 寄存器
用来存放加速度计、温度计、陀螺仪测量到的原始数据

详情见MPU-60X0寄存器手册
代码详解
mpu6050.c
/** mpu6050.c** Created on: Nov 13, 2019* Author: Bulanov Konstantin** Contact information* -------------------** e-mail : leech001@gmail.com*//** |---------------------------------------------------------------------------------* | Copyright (C) Bulanov Konstantin,2021* |* | This program is free software: you can redistribute it and/or modify* | it under the terms of the GNU General Public License as published by* | the Free Software Foundation, either version 3 of the License, or* | any later version.* |* | This program is distributed in the hope that it will be useful,* | but WITHOUT ANY WARRANTY; without even the implied warranty of* | MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* | GNU General Public License for more details.* |* | You should have received a copy of the GNU General Public License* | along with this program. If not, see <http://www.gnu.org/licenses/>.* |* | Kalman filter algorithm used from https://github.com/TKJElectronics/KalmanFilter* |---------------------------------------------------------------------------------*/#include <math.h>
#include "mpu6050.h"#define RAD_TO_DEG 57.295779513082320876798154814105 //用以弧度转角度,角度 = 弧度 × (180/π),其中 180/π 的值约为 57.2958#define WHO_AM_I_REG 0x75 // MPU6050 的 WHO_AM_I 寄存器地址。通过读取该寄存器的值,如果返回 0x68,则表示该 I2C 设备是 MPU6050 传感器。
#define PWR_MGMT_1_REG 0x6B // MPU6050 的 Power Management 1 寄存器地址 (电源管理 1 寄存器),用于配置电源模式、时钟源选择、设备复位和睡眠模式等功能。
#define SMPLRT_DIV_REG 0x19 // MPU6050 的 Sample Rate Divider 寄存器地址 (采样速率分频器),通过该寄存器设置分频系数,配置 MPU6050 数据输出速率。
#define ACCEL_CONFIG_REG 0x1C // MPU6050 的 ACCEL_CONFIG 寄存器地址 (加速度计配置寄存器),用于设置加速度计的量程范围(例如 ±2g、±4g 等)。
#define ACCEL_XOUT_H_REG 0x3B // MPU6050 的加速度计 X 轴高位数据寄存器地址,用于读取 X 轴加速度高字节数据。
#define TEMP_OUT_H_REG 0x41 // MPU6050 的温度传感器高位数据寄存器地址,用于读取温度的高字节数据。
#define GYRO_CONFIG_REG 0x1B // MPU6050 的 GYRO_CONFIG 寄存器地址 (陀螺仪配置寄存器),用于设置陀螺仪的量程范围(例如 ±250°/s、±500°/s 等)。
#define GYRO_XOUT_H_REG 0x43 // MPU6050 的陀螺仪 X 轴高位数据寄存器地址,用于读取 X 轴陀螺仪角速度的高字节数据。// Setup MPU6050
#define MPU6050_ADDR 0xD0 // MPU6050 的补位后的 8 位地址,MPU6050的 7 位地址为 110 100x (0x68 或 0x69),最低位 x 取决于 AD0 引脚状态。I2C 通信时,左移一位并在最低位加 0(写)或 1(读),形成 8 位地址。以写为例,MPU6050 地址为 1101 0000 (0xD0) 表示写操作
const uint16_t i2c_timeout = 100; // I2C 通信超时时间,单位为毫秒。
const double Accel_Z_corrector = 14418.0;uint32_t timer;Kalman_t KalmanX = {.Q_angle = 0.001f,.Q_bias = 0.003f,.R_measure = 0.03f};Kalman_t KalmanY = {.Q_angle = 0.001f,.Q_bias = 0.003f,.R_measure = 0.03f,
};uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx)
{uint8_t check; // 存储从 WHO_AM_I 寄存器读取到的设备 ID,实际上是该寄存器的值0x68(该寄存器默认值为 0x68 (104),也即 MPU6050 的地址uint8_t Data;HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, WHO_AM_I_REG, 1, &check, 1, i2c_timeout); // 通过 I2Cx 访问 MPU6050 的 WHO_AM_I 寄存器,读取 1 字节数据到 check,超时时间为 i2c_timeout。if (check == 104) // 检验 check 的值 是否为 0x68{// 设置 Power Management 1 寄存器 (电源管理1寄存器),将其第7位 置1 (1000 0000) 进行设备复位,防止数据残留Data = 0x80;HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, PWR_MGMT_1_REG, 1, &Data, 1, i2c_timeout);// 设置 Power Management 1 寄存器 (电源管理1寄存器),将其所有位置0 (0000 0000) ,进行唤醒Data = 0;HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, PWR_MGMT_1_REG, 1, &Data, 1, i2c_timeout);// 设置 Sample Rate Divider 寄存器 (采样速率分频器),采样速率 = 1kHz / ( 0X04 + 1) = 200HzData = 0x04;HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, SMPLRT_DIV_REG, 1, &Data, 1, i2c_timeout);//设置 ACCEL_CONFIG 寄存器 (加速度计配置 Accelerometer Configuration )// 关闭X Y Z轴的自检功能,配置量程为(-2g,+2g) XA_ST=0,YA_ST=0,ZA_ST=0, FS_SEL=0 -> +- 2gData = 0x00;HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, ACCEL_CONFIG_REG, 1, &Data, 1, i2c_timeout);//设置 GYRO_CONFIG 寄存器 (陀螺仪配置 Gyroscopic Configuration )// 关闭X Y Z轴的自检功能,并配置量程为 (-250 °/s,+250 °/s) XG_ST=0, YG_ST=0, ZG_ST=0 , FS_SEL=0 -> ±250 °/sData = 0x00;HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, GYRO_CONFIG_REG, 1, &Data, 1, i2c_timeout);return 0; //返回0,表示 MPU6050 正常}return 1; //返回1,表示 MPU6050 异常
}void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{uint8_t Rec_Data[6]; //存储读取到的 6 字节加速度计原始数据// 通过 I2Cx 访问 MPU6050 的 Accelerometer Measurements 寄存器组中的 ACCEL_XOUT_H_REG 寄存器(加速度计X轴加速度高字节 寄存器),读取 6 字节数据( X轴加速度的高字节 ---> Z轴加速度的低字节 )到 Rec_Data ,超时时间为 i2c_timeout。HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, ACCEL_XOUT_H_REG, 1, Rec_Data, 6, i2c_timeout);//将读取到的存储在 Rec_Data[6] 中的原始数据 分离转换为 X、Y、Z轴加速度的 16 位有符号整数DataStruct->Accel_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);DataStruct->Accel_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);DataStruct->Accel_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);/*** 将原始值转换为以 'g' 为单位的加速度值。根据 FS_SEL 配置来进行换算,这里 FS_SEL = 0,对应量程为 ±2g,因此需要将原始值除以 16384.0,来得到加速度值。 根据 Accelerometer Measurements 加速度计测量寄存器组中的 AFS_SEL 配置中的描述,可知量程对应的除数更多细节请参考 ACCEL_CONFIG 与 Accelerometer Measurements寄存器的配置。 ****/// 将原始值转换为 g 为单位的加速度DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0; // X 轴加速度DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0; // Y 轴加速度DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector; //Z 轴加速度 (由于Z轴加速度计的值会受重力、传感器零飘、传感器精度与校准的影响,导致在水平放置时,Accel_Z_RAW 不为 2g 量程对应的理论值 16384,而是实际值。修正参数就是根据实际情况测出的,用来矫正零飘和其他影响的校正因子
}void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{uint8_t Rec_Data[6]; //存储读取到的 6 字节陀螺仪计原始数据// 通过 I2Cx 访问 MPU6050 的 Gyroscope Measurements 寄存器组中的 GYRO_XOUT_H_REG 寄存器(陀螺仪 X 轴角速度高字节 寄存器),读取 6 字节数据( X 轴角速度的高字节 ---> Z 轴角速度的低字节 )到 Rec_Data ,超时时间为 i2c_timeout。HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, GYRO_XOUT_H_REG, 1, Rec_Data, 6, i2c_timeout);//将读取到的存储在 Rec_Data[6] 中的原始数据 分离转换为 X、Y、Z轴角速度的 16 位有符号整数DataStruct->Gyro_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);DataStruct->Gyro_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);DataStruct->Gyro_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);/*** 将原始值转换为度每秒(dps,degrees per second)。根据 FS_SEL 的配置选择适当的比例系数。这里假设 FS_SEL = 0,对应量程为 ±250 °/s,因此需要将原始值除以 131.0 来得到角速度(dps)。根据 Gyroscope Measurements 角速度计测量寄存器组中的 FS_SEL 配置中的描述,可知量程对应的除数更多细节请参考 GYRO_CONFIG 与 Gyroscope Measurements寄存器的配置。 ****/// 将原始值转换为 dps 为单位的加速度DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0; // X 轴角速度DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0; // Y 轴角速度DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0; // Z 轴角速度
}void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{uint8_t Rec_Data[2]; // 用于存储从温度寄存器读取的 2 字节数据int16_t temp; // 用于存储拼接后的 16 位原始温度数据// 从 Temperature Measurement 温度测量寄存器组 中的 TEMP_OUT_H 寄存器开始,读取 2 字节数据(高字节和低字节)HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, TEMP_OUT_H_REG, 1, Rec_Data, 2, i2c_timeout);// 将读取到的高字节和低字节拼接为 16 位的有符号整数temp = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);// 将原始温度值转换为摄氏温度 (详情见 Temperature Measurement// 转换公式:温度值(°C) = (原始值 / 340.0) + 36.53 DataStruct->Temperature = (float)((int16_t)temp / (float)340.0 + (float)36.53);
}/*** @brief 读取 MPU6050 所有传感器数据,并使用卡尔曼滤波器计算角度* * 该函数通过 I2C 接口读取 MPU6050 传感器的加速度计、陀螺仪和温度的数据,* 并使用卡尔曼滤波器对预测角度与测量角度(加速度计和陀螺仪数据)进行融合,以计算俯仰角(pitch)和滚转角(roll)。** @param I2Cx I2C 句柄,用于通过 I2C 接口与 MPU6050 通信* @param DataStruct 指向 MPU6050_t 结构体的指针,存储读取到的原始传感器数据以及处理后的数据(如加速度、角速度、角度等)*/
void MPU6050_Read_All(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{uint8_t Rec_Data[14]; // 用于存储从 MPU6050 读取的 14 字节数据int16_t temp; // 临时变量,用于存储原始温度数据//1.通过 I2C 接口从 MPU6050 读取 14 字节加速度、温度、角速度数据HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, ACCEL_XOUT_H_REG, 1, Rec_Data, 14, i2c_timeout);//2.解析数据// 解析加速度计数据DataStruct->Accel_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);DataStruct->Accel_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);DataStruct->Accel_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);// 解析温度数据temp = (int16_t)(Rec_Data[6] << 8 | Rec_Data[7]);// 解析陀螺仪数据DataStruct->Gyro_X_RAW = (int16_t)(Rec_Data[8] << 8 | Rec_Data[9]);DataStruct->Gyro_Y_RAW = (int16_t)(Rec_Data[10] << 8 | Rec_Data[11]);DataStruct->Gyro_Z_RAW = (int16_t)(Rec_Data[12] << 8 | Rec_Data[13]);//3.转换解析后的数据: 原始数据 --> 实际意义数据// 将原始加速度计数据 ---> 以 "g" 为单位的加速度值DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0;DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0;DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector;// 将原始温度数据 ---> 摄氏温度DataStruct->Temperature = (float)((int16_t)temp / (float)340.0 + (float)36.53);// 将原始陀螺仪数据 ---> 角速度(以 "度每秒 (dps)" 为单位DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0;DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0;DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0;//4.卡尔曼滤波// 计算时间增量 dt,单位为秒double dt = (double)(HAL_GetTick() - timer) / 1000; // 获取时间差(毫秒),转换为秒timer = HAL_GetTick(); // 更新计时器// 计算滚转角 rolldouble roll; // 用于存储计算得到的滚转角(X 轴)double roll_sqrt = sqrt(DataStruct->Accel_X_RAW * DataStruct->Accel_X_RAW + DataStruct->Accel_Z_RAW * DataStruct->Accel_Z_RAW);if (roll_sqrt != 0.0){roll = atan(DataStruct->Accel_Y_RAW / roll_sqrt) * RAD_TO_DEG; // 先计算出弧度制 roll ,再弧度转换为角度值}else{roll = 0.0;}// 计算俯仰角 pitchdouble pitch = atan2(-DataStruct->Accel_X_RAW, DataStruct->Accel_Z_RAW) * RAD_TO_DEG;// 如果俯仰角度变化过快(超过90度),防止角度跳变if ((pitch < -90 && DataStruct->KalmanAngleY > 90) || (pitch > 90 && DataStruct->KalmanAngleY < -90)){KalmanY.angle = pitch; DataStruct->KalmanAngleY = pitch;}else{// 卡尔曼滤波器更新俯仰角度 YDataStruct->KalmanAngleY = Kalman_getAngle(&KalmanY, pitch, DataStruct->Gy, dt);}// 如果俯仰角绝对值超过 90 度,则反转 X 轴的陀螺仪角速度,防止符号错误if (fabs(DataStruct->KalmanAngleY) > 90)DataStruct->Gx = -DataStruct->Gx;// 卡尔曼滤波器更新滚转角度 XDataStruct->KalmanAngleX = Kalman_getAngle(&KalmanX, roll, DataStruct->Gx, dt);
}/*** @brief 使用卡尔曼滤波,融合角度预测值与角度测量值,得到最优角度值* * 卡尔曼滤波通过结合系统的预测值和测量值,来修正角度和偏置的估计,减少噪声对结果的影响。* * @param Kalman 卡尔曼滤波器结构体指针,包含预测角度、预测偏置、角度协方差、偏置协方差、噪声协方差及协方差矩阵* @param newAngle 角度测量值(读取加速度计的三轴加速度分量,再计算反正切得到角度测量值)* @param newRate 角速度“实际“值(他只是可以看作角速度实际值,实际上是角速度测量值。只不过因陀螺仪精度问题,而有过程噪声。可以理解为匀变速直线运动的状态方程中必须有 速度v 的参与,这个 v 实际上也是测量值)* @param dt 时间间隔,两个传感器数据采样之间的时间差(秒)* @return double 滤波后的最优角度值*/double Kalman_getAngle(Kalman_t *Kalman, double newAngle, double newRate, double dt)
{
/*---------------------预测阶段--------------------------*/// 1. 预测角度// 角速度 = 陀螺仪角速度 - 陀螺仪偏置值 (得到无偏角速度)double rate = newRate - Kalman->bias;// 预测角度 = 前一时刻角速 + 时间间隔*角速度Kalman->angle += dt * rate;// 2. 预测协方差矩阵Kalman->P[0][0] += dt * (dt * Kalman->P[1][1] - Kalman->P[0][1] - Kalman->P[1][0] + Kalman->Q_angle); // 预测角度协方差Kalman->P[0][1] -= dt * Kalman->P[1][1]; // 预测角度和偏置的协方差Kalman->P[1][0] -= dt * Kalman->P[1][1]; // 预测偏置和角度的协方差Kalman->P[1][1] += Kalman->Q_bias * dt; // 预测偏置协方差/*---------------------更新阶段--------------------------*/// 3. 更新卡尔曼增益// 总误差协方差 = 预测协方差 + 测量噪声协方差double S = Kalman->P[0][0] + Kalman->R_measure;// 卡尔曼增益 Kdouble K[2]; K[0] = Kalman->P[0][0] / S; // 角度的卡尔曼增益K[1] = Kalman->P[1][0] / S; // 偏置的卡尔曼增益// 4. 更新角度和偏置// 测量残差 = 测量值 - 预测值double y = newAngle - Kalman->angle;// 根据卡尔曼增益,更新角度和偏置的估计值,修正预测阶段的误差Kalman->angle += K[0] * y; // 更新角度估计。Kalman->bias += K[1] * y; // 更新偏置估计// 5. 更新协方差矩阵 Pdouble P00_temp = Kalman->P[0][0];double P01_temp = Kalman->P[0][1];Kalman->P[0][0] -= K[0] * P00_temp; // 更新角度协方差Kalman->P[0][1] -= K[0] * P01_temp; // 更新角度和偏置的协方差Kalman->P[1][0] -= K[1] * P00_temp; // 更新偏置和角度的协方差Kalman->P[1][1] -= K[1] * P01_temp; // 更新偏置协方差// 6. 返回滤波后的最优角度值return Kalman->angle;
};
mpu6050.h
/** mpu6050.h** Created on: Nov 13, 2019* Author: Bulanov Konstantin* 本头文件定义了用于操作 MPU6050 传感器的结构和函数,包括加速度计、陀螺仪、温度传感器的读取函数,* 以及用于角度计算的卡尔曼滤波算法。*/#ifndef INC_GY521_H_
#define INC_GY521_H_#endif /* INC_GY521_H_ */#include <stdint.h>
#include "i2c.h"/* * MPU6050 数据结构体* 该结构体保存从 MPU6050 传感器读取的原始加速度和原始陀螺仪数据* 以及经过处理后的加速度、角速度和温度数据*/
typedef struct
{int16_t Accel_X_RAW; // X 轴加速度原始数据int16_t Accel_Y_RAW; // Y 轴加速度原始数据int16_t Accel_Z_RAW; // Z 轴加速度原始数据double Ax; // X 轴加速度值(g)double Ay; // Y 轴加速度值(g)double Az; // Z 轴加速度值(g)int16_t Gyro_X_RAW; // X 轴陀螺仪原始数据int16_t Gyro_Y_RAW; // Y 轴陀螺仪原始数据int16_t Gyro_Z_RAW; // Z 轴陀螺仪原始数据double Gx; // X 轴角速度值(°/s)double Gy; // Y 轴角速度值(°/s)double Gz; // Z 轴角速度值(°/s)float Temperature; // 传感器的温度(°C)double KalmanAngleX; // X 轴的卡尔曼滤波计算角度double KalmanAngleY; // Y 轴的卡尔曼滤波计算角度
} MPU6050_t;/* * 卡尔曼滤波器结构体* 用于根据 MPU6050 数据平滑地估算出角度,滤除噪声并提供更稳定的输出*/
typedef struct
{double Q_angle; // 角度过程噪声协方差double Q_bias; // 偏差过程噪声协方差double R_measure; // 测量噪声协方差double angle; // 当前估计角度double bias; // 当前估计偏差double P[2][2]; // 误差协方差矩阵
} Kalman_t;// 初始化 MPU6050 传感器,配置 MPU6050 参数,返回 0 表示成功,1 表示失败
uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx); // 读取 MPU6050 加速度计数据,更新到 mpu6050 结构体中
void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct); // 读取 MPU6050 陀螺仪数据,更新到 mpu6050 结构体中
void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct); // 读取 MPU6050 温度数据,更新到 mpu6050 结构体中
void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct); // 读取 MPU6050 的加速度计、陀螺仪和温度数据,并更新到 mpu6050 结构体中
void MPU6050_Read_All(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct); // 使用卡尔曼滤波器计算角度,根据新测得的角度和角速度更新滤波器,返回平滑的角度值
double Kalman_getAngle(Kalman_t *Kalman, double newAngle, double newRate, double dt);
使用说明
STEP1:复制mpu6050的.c .h到你的工程文件夹中,并add文件与编译路径
STEP2:Includes
#include "mpu6050.h"
STEP3:声明私有变量PV
/ * USER CODE BEGIN PV * /
MPU6050_t MPU6050;
/ * USER CODE END PV * /
STEP4:初始化MPU6050
void setup(void){while (MPU6050_Init(&hi2c1) == 1);
}
STEP5:调用函数读取并解析数据
void loop(void){MPU6050_Read_All(&hi2c1, &MPU6050);HAL_Delay (100);
}
经过卡尔曼滤波后得到的数据(最优估计)为MPU6050.KalmanAngleX和MPU6050.KalmanAngleY
可以打印输出
相关文章:
【STM32 HAL库】MPU6050姿态解算 卡尔曼滤波
【STM32 HAL库】MPU6050姿态解算 卡尔曼滤波 前言MPU6050寄存器代码详解mpu6050.cmpu6050.h 使用说明 前言 本篇文章基于卡尔曼滤波的原理详解与公式推导,来详细的解释下如何使用卡尔曼滤波来解算MPU6050的姿态 参考资料:Github_mpu6050 MPU6050寄存器…...

Linux系统——ssh远程连接
Linux系统——ssh远程连接 一、ssh协议介绍1、远程连接协议2、ssh服务基本操作3、ssh常用操作 二、ssh加密1、加密算法类型2、对称加密算法3、非对称加密算法 三、免密ssh的配置1、ssh认证方式2、配置免密ssh3、ssh-copy-id做了什么? 四、ssh服务配置 一、ssh协议介…...

python学习-第一个小游戏(vscode环境)
学习小甲鱼的视频,写了一个小游戏,vscode环境 运行结果 源码地址: python小游戏-猜数字源码...
)
程序设计基础I-单元测试2(机测)
7-1 sdut-C语言实验-AB for Input-Output Practice (不确定次数循环) Your task is to Calculate a b. Too easy?! Of course! I specially designed the problem for all beginners. You must have found that some problems have the same titles with this one, yes, a…...
Claude 3.5深夜觉醒,学会模仿人类用电脑,力压GPT-4o
1.Claude 3.5深夜重磅更新 Anthropic AI深夜发布了备受期待的Claude 3.5系列更新,包括了全新升级的Claude 3.5 Sonnet和首发的Claude 3.5 Haiku。 虽然备受期待的Opus版本尚未公布,但新版本的Sonnet在推理能力上取得了显著的进步,超越了Open…...

PuTTY
PuTTY 是一个免费的开源终端仿真器和串口终端,广泛用于在 Windows 系统上进行 SSH、Telnet 和 Rlogin 等网络协议的连接。 它允许用户通过安全的方式访问远程计算机,常用于管理服务器和网络设备。 PuTTY 也支持公钥身份验证和端口转发等功能,…...

2024软件测试面试秘籍(含答案+文档)
🍅 点击文末小卡片,免费获取软件测试全套资料,资料在手,涨薪更快 Part1 1、你的测试职业发展是什么? 测试经验越多,测试能力越高。所以我的职业发展是需要时间积累的,一步步向着高级测试工程师…...

券商api怎么获取,如何获取券商API接口?
炒股自动化:申请官方API接口,散户也可以 python炒股自动化(0),申请券商API接口 python炒股自动化(1),量化交易接口区别 Python炒股自动化(2):获取…...

跟着六西格玛设计DFSS走,让你的项目、服务、产品都“牛”起来——张驰咨询
六西格玛设计,这一数据驱动的质量管理策略,正以其独特的魅力和广泛的适用性,在各行各业中掀起了一场质量革命。从精密的制造业到细致的服务业,再到复杂的项目管理,六西格玛设计以其严谨的逻辑和高效的方法,…...
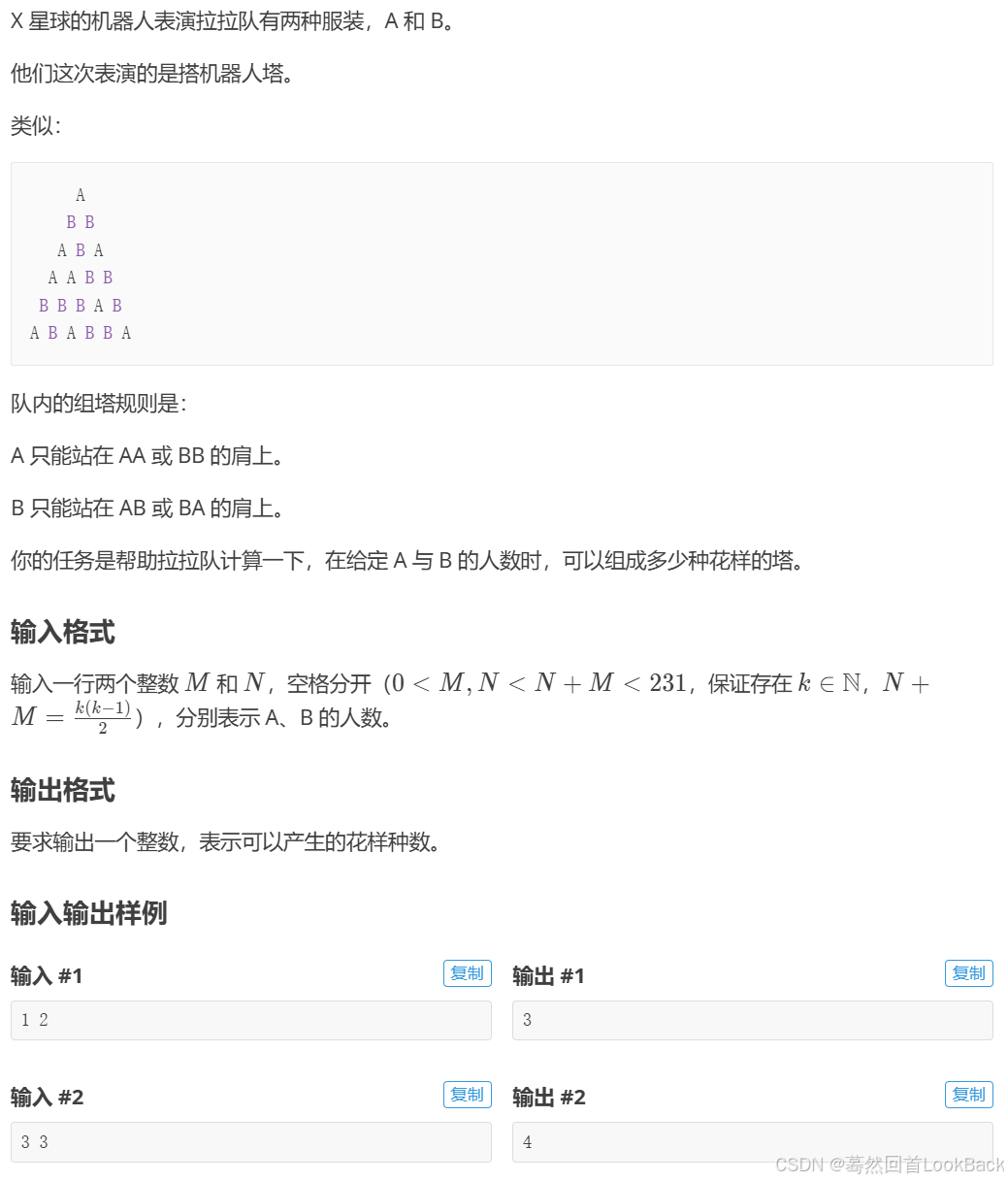
【2024.10.22练习】机器人塔
题目描述 题目分析 由于数据小,直接考虑DFS搜索底层所有排列组合。 我的代码 需要注意:这个数据有点漏洞的是题干声明NM<231,但实际上有个测试点是等于231的。 一开始在build_tower()函数中建完整个塔再判定是否…...

酒店预订订房小程序源码系统 多酒店入驻+打造类似美团的酒店模式 带完整的安装代码包以及搭建部署教程
系统概述 随着移动互联网的普及,小程序因其轻量级、无需下载安装、即用即走的特点,迅速成为各行业的标配。对于酒店预订行业而言,小程序不仅能够有效提升用户体验,还能降低运营成本,提高转化率。本源码系统正是基于这…...

springboot037基于SpringBoot的墙绘产品展示交易平台的设计与实现(论文+源码)_kaic
毕 业 设 计(论 文) 题目:墙绘产品展示交易平台设计与实现 摘 要 现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本墙绘产品展示…...

YOLOv8实战人脸-口罩检测与识别【数据集+YOLOv8模型+源码+PyQt5界面】
本文采用YOLOv8作为核心算法框架,结合PyQt5构建用户界面,使用Python3进行开发。YOLOv8以其高效的实时检测能力,在多个目标检测任务中展现出卓越性能。本研究针对人脸-口罩数据集进行训练和优化,该数据集包含丰富的人脸-口罩图像样…...

《黑神话悟空》各章节boss顺序汇总
第一章BOSS顺序: 1、牯护院:犀牛精,位于苍狼岭娟,击败后能获得定身术。 2、广智:火刀狼, 位于观音禅院,击败后获得广智变身,记得敲钟。 3、蓝皮幽魂:蓝皮大头࿰…...

rust中cargo.toml详细介绍
1. cargo.toml介绍 Cargo.toml是 Rust 项目的配置文件,它使用 TOML(Tom’s Obvious, Minimal Language)格式。 1.1 基本结构 [package]:包含项目的基本信息。 name:项目名称。version:项目版本号。edition:Rust 版本,如 2018、2021 等。[package]name = "abc&q…...

jupyter notebook 笔记
nbclassic 经典版 新版的 jupyter notebook 太丑了。 最难受的是字体太小了。 我还是喜欢老版本的 jupyter notebook. 安装经典版: pip install nbclassic 启动经典版: jupyter server 或是 jupyter nbclassic 参考来源: https://github.com/jupyter/nbclassic jupyter note…...

Atlas800昇腾服务器(型号:3000)—CANN安装(二)
服务器配置如下: CPU/NPU:鲲鹏 CPU(ARM64)A300I pro推理卡 系统:Kylin V10 SP1【下载链接】【安装链接】 驱动与固件版本版本: Ascend-hdk-310p-npu-driver_23.0.1_linux-aarch64.run【下载链接】 Ascend-…...

考研鼓励小程序
考研冲刺倒计时,加入我们一起奋斗💥 考研倒计时提醒神器来啦! 距离考研越来越近,复习是否紧张又有些焦虑?不用担心!我特别制作了一个 考研倒计时提醒服务,每天在 7:00 和 23:59 准时为你发送倒…...

Wooden UI(木头UI纹理按钮边框 背景图标 带PNG素材)
资源包包含以下元素:按钮、图标、框架、复选框等,提供分层的 PSD 文件。 下载:Unity资源商店链接资源下载链接 效果图:...

WebRTC音频 03 - 实时通信框架
WebRTC音频01 - 设备管理 WebRTC音频 02 - Windows平台设备管理 WebRTC音频 03 - 实时通信框架(本文) WebRTC音频 04 - 关键类 WebRTC音频 05 - 音频采集编码 一、前言: 前面介绍了音频设备管理,并且以windows平台为例子,介绍了ADM相关的类…...
)
自动化生产管理平台(Automatic)
1,自动化生产管理平台(Automatic) 1.1,重新定义Window样式 添加WindowChrome元素进行自定义定义 <Window x:Class"lzg.Automatic.MainWindow"xmlns"http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x"…...

EchoType开源键盘固件:基于状态感知的智能输入引擎深度解析
1. 项目概述:从“EchoType”看开源键盘固件的深度定制最近在键盘客制化圈子里,一个名为“EchoType”的项目开始被一些资深玩家频繁提及。它的GitHub仓库地址是ljyou001/echotype,从名字上你就能猜到,这大概率是一个与键盘固件、打…...

别再搞混了!DCI-P3、Display P3、sRGB色彩空间到底差在哪?给设计师和开发者的实用指南
别再搞混了!DCI-P3、Display P3、sRGB色彩空间到底差在哪?给设计师和开发者的实用指南 打开设计软件的色彩配置选项,你是否曾被DCI-P3、Display P3、sRGB这些术语搞得晕头转向?当客户抱怨"这个红色在手机上看起来不一样"…...

Gentoo Linux 中通过 Overlay 优雅安装 Cursor 二进制编辑器
1. 项目概述与背景如果你是一名 Gentoo Linux 的用户,同时又对 Cursor 这款新兴的 AI 代码编辑器感兴趣,那么你很可能已经遇到了一个经典的 Gentoo 式难题:如何在这样一个以源码编译为核心的发行版上,方便地安装一个官方只提供.de…...

为什么我们的浏览器操作效率低下?如何用Shortkeys扩展实现3倍效率提升
为什么我们的浏览器操作效率低下?如何用Shortkeys扩展实现3倍效率提升 【免费下载链接】shortkeys A browser extension for custom keyboard shortcuts 项目地址: https://gitcode.com/gh_mirrors/sh/shortkeys 每天在浏览器上,我们花费大量时间…...

终极罗技PUBG鼠标宏配置:告别枪口上跳的智能解决方案
终极罗技PUBG鼠标宏配置:告别枪口上跳的智能解决方案 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 还在为《绝地求生》中的枪口上跳…...
)
别再对着乱码发愁了!手把手教你用Python解码AIS VDM暗码(附完整代码)
从AIS暗码到可读数据:Python实战解析指南 当你第一次看到类似!AIVDM,1,1,,A,169DvlgP1R8KPtvFBfOCt3?h0RT,0*03这样的字符串时,可能会感到一头雾水。这串看似随机的字符实际上是AIS(船舶自动识别系统)传输的VDM(VHF Data-link Message)报文,…...

中文知识管理利器:本地化部署与向量检索实践指南
1. 项目概述:一个面向中文用户的知识管理利器 最近在折腾个人知识库,发现了一个挺有意思的开源项目,叫 RomeoSY/zh-knowledge-manager 。乍一看名字,你可能觉得这又是一个“知识管理”工具,市面上不是有 Notion、Ob…...

第10期| 空间算法入门--GeoAI核心算法拆解,不用啃论文,通俗看懂原理
大家好,我是你们的地理信息工程师朋友,专注GIS与AI的实战落地。 第上一期期我们聊了GeoAI的应用场景,很多朋友留言说“想入门,但论文太晦涩,代码看不懂”。这期实战笔记就精准解决这个痛点——不啃晦涩论文,…...

Rust异步运行时rustclaw:高性能任务调度与并发编程实践
1. 项目概述与核心价值最近在折腾一个需要处理大量网络请求和并发任务的后台服务,性能瓶颈卡得我有点难受。传统的异步框架用起来总觉得不够“爽利”,要么是内存占用高,要么是并发模型复杂,调试起来像在走迷宫。就在我四处翻找有没…...