java 提示 避免用Apache Beanutils进行属性的copy。
避免用Apache Beanutils进行属性的copy。
Inspection info:
避免用Apache Beanutils进行属性的copy。 说明:Apache BeanUtils性能较差,可以使用其他方案比如Spring BeanUtils, Cglib BeanCopier。
TestObject a = new TestObject();
TestObject b = new TestObject();
a.setX(b.getX());
a.setY(b.getY());

这里引入了 import org.apache.commons.beanutils.BeanUtils; 我们替换成 import org.springframework.beans.BeanUtils;
使用的时候注册 copyProperties(Object source, Object target) 的位置变换了,需要调整下目标和源的位置对调
相关文章:
java 提示 避免用Apache Beanutils进行属性的copy。
避免用Apache Beanutils进行属性的copy。 Inspection info: 避免用Apache Beanutils进行属性的copy。 说明:Apache BeanUtils性能较差,可以使用其他方案比如Spring BeanUtils, Cglib BeanCopier。 TestObject a new TestObject(); TestObject b new Te…...
autMan框架对接Kook机器人
一、创建kook机器人 KOOK 二、获取机器人token 三、填写autMan参数并重启 四、将机器人加入服务器 五、效果图 回复...

RK3568平台(camera篇)UVC AICamera集成
一.客供AIcamera集成思路 主板端:目前在RK主板上预留了一个USB接口,使用USB接口来连接供应商提供的UVC摄像头。 供应商UVC摄像头:目前供应商提供的usbcamera是rv1126,基于usb接口跟主板端相连接。 其实使用供应商提供的camera,里面的大部分功能供应商已经是做好的,里面…...

【mod分享】极品飞车10魔改模组,全新UI,全新道路,全新建筑,高清植被,全新的道路围栏,全新的天空,体验另一种速度与激情
各位好,今天小编给大家带来一款新的高清重置魔改MOD,本次高清重置的游戏叫《极品飞车10卡本峡谷》。 《极品飞车10:卡本峡谷》该游戏可选择四个模式:生涯、快速比赛、挑战赛、多人连线游戏模式(已不可用)&…...
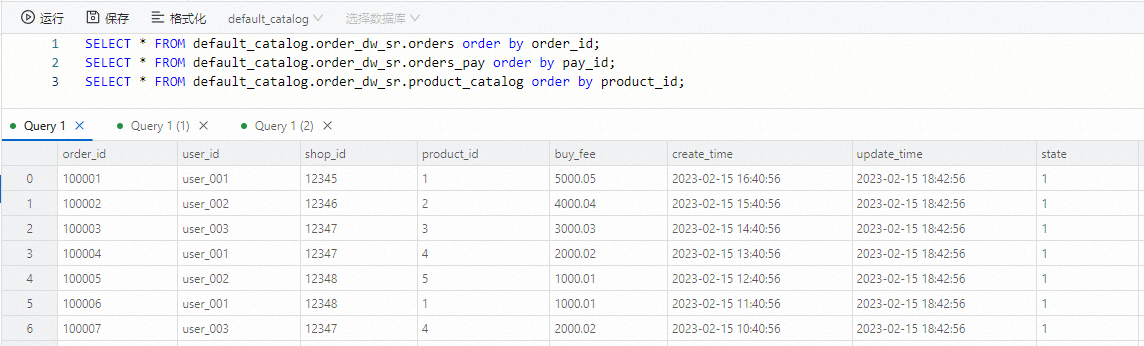
[实时计算flink]数据摄入YAML作业快速入门
实时计算Flink版基于Flink CDC,通过开发YAML作业的方式有效地实现了将数据从源端同步到目标端的数据摄入工作。本文介绍如何快速构建一个YAML作业将MySQL库中的所有数据同步到StarRocks中。 前提条件 已创建Flink工作空间,详情请参见开通实时计算Flink版…...

CMOS 图像传感器:像素寻址与信号处理
CMOS image sensor : pixel addressing and signal processing CMOS image sensor 对于寻址和信号处理有三种架构 pixel serial readout and processingcolumn parallel readout and processingpixel parallel readout and processing 其中,图 (b) column paralle…...

React Native 项目使用Expo模拟器运行iOS和Android
iOS没有连接设备: 确保你已经用 USB 线将你的 iOS 设备连接到了你的 Mac。 设备未信任: 如果你的设备是第一次连接到 Mac,可能需要在设备上信任这台计算机。通常,当你连接设备时,设备上会弹出一个对话框,…...

鸿蒙-键盘弹出时 promptAction.showToast 被遮盖
可以设置弹窗显示模式showMode,支持显示在应用之上。 参考代码: promptAction.showToast({ message: Message Info, duration: 2000, showMode: promptAction.ToastShowMode.TOP_MOST }); 文档中心...

十一、pico+Unity交互开发教程——手指触控交互(Poke Interaction)
一、XR Poke Interactor 交互包括发起交互的对象(Interactor)和可被交互的对象(Interactable)。XR Interaction Toolkit提供了XR Poke Interactor脚本用于实现Poke功能。在LeftHand Controller和RightHand Controller物体下创建名…...

Request2:Post请求和Json
百度翻译拿到自己想看的数据,下图查看请求到数据的请求 preview提前看下 取出对应的RequestUrl ,看出来要使用的话得用post请求 #!/usr/bin/env python # -*- coding:utf-8 -*- import requests import json if __name__ "__main__":#1.指定…...

【C】数组及其字符串
数组及其字符数组的基本知识点,以及一个编写一个系统登录界面,输入用户名(chen)和密码(1234),用户名只能输入字符8位,密码只能输入数字12位,使用光标定位函数 例…...

Python 代码实现对《红楼梦》文本的词频统计和数据可视化
Python 代码主要实现了对《红楼梦》文本的词频统计和数据可视化 完整详细下载地址:https://download.csdn.net/download/huanghm88/89879439 python """ 实训4 基于词频的篇章语义相似度与红楼梦内容分析 步骤3 针对红楼梦词频的数据可视化 &qu…...

yjs机器学习数据操作01——数据的获取、可视化
数据的获取 1.库与模块: import sklearnfrom sklearn import datasets 2.数据集获取的API及解释 对于sklearn的数据获取,主要分为两大部分,分别是“小数据集的获取——load_xxx”和“大数据集的获取fetch_xxx” a.datasets.load_xxx(): …...
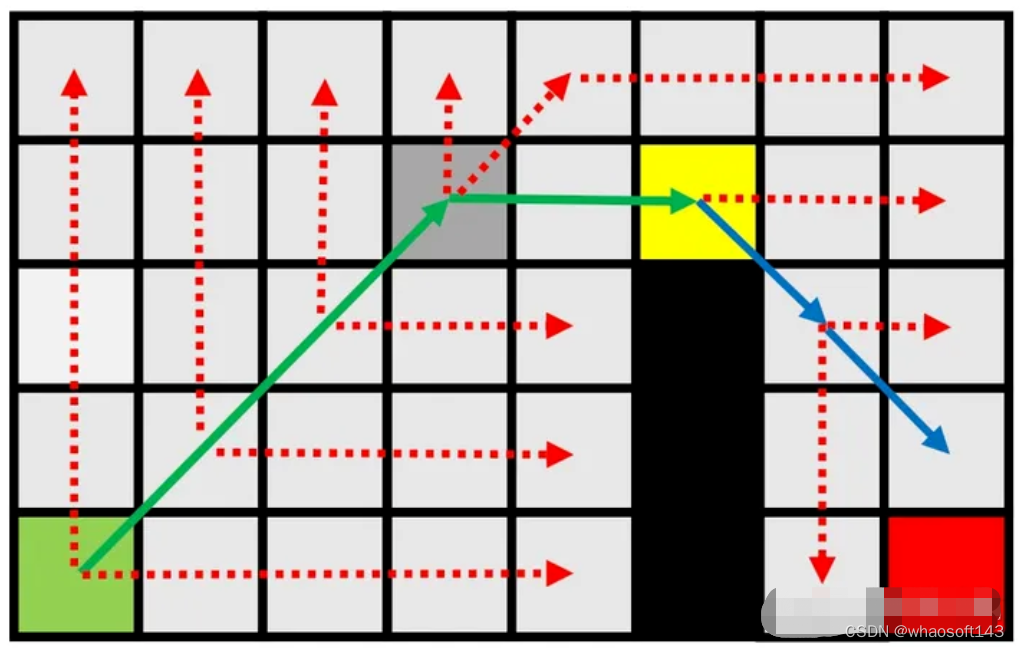
w~自动驾驶合集9
我自己的原文哦~ https://blog.51cto.com/whaosoft/12320882 #自动驾驶数据集全面调研 自动驾驶技术在硬件和深度学习方法的最新进展中迅速发展,并展现出令人期待的性能。高质量的数据集对于开发可靠的自动驾驶算法至关重要。先前的数据集调研试图回顾这些数据集&…...

232. 用栈实现队列 【复习链表】-用自定义链表实现栈 用栈实现队列
232. 用栈实现队列 已解答 简单 相关标签 相关企业 请你仅使用两个栈实现先入先出队列。队列应当支持一般队列支持的所有操作(push、pop、peek、empty): 实现 MyQueue 类: void push(int x) 将元素 x 推到队列的末尾int pop() 从队…...
)
G-Set(增长集合,Grow-Only Set)
一、概念 G-Set(增长集合,Grow-Only Set)是一种冲突自由复制数据类型(Conflict-Free Replicated Data Type, CRDT),用于在分布式系统中同步和合并数据,而不需要中央协调器。G-Set 支持两种操作…...

《Vue.js 组件开发秘籍:从基础到高级》
Vue.js 组件开发是构建 Vue 应用程序的核心方法之一。以下是对 Vue.js 组件开发的介绍: 一、什么是 Vue.js 组件? 在 Vue.js 中,组件是可复用的 Vue 实例,它们封装了特定的功能和用户界面。每个组件都有自己独立的模板、逻辑和样…...
【Next.js 项目实战系列】03-查看 Issue
原文链接 CSDN 的排版/样式可能有问题,去我的博客查看原文系列吧,觉得有用的话,给我的库点个star,关注一下吧 上一篇【Next.js 项目实战系列】02-创建 Issue 查看 Issue 展示 Issue 本节代码链接 首先使用 prisma 获取所有…...

Android Settings 设置项修改
Settings 设置项 在 Android 系统上,WRITE_SETTINGS 这个权限从 API 1 就已经开始有了。 通过在 app 中设置权限 android.permission.WRITE_SETTINGS 允许 app 读/写 系统设置。 在官方文档的描述中,还有一段注意事项: Note: If the app targets API level 23 or higher,…...

Windows远程桌面到Ubuntu
在Ubuntu系统中,默认情况下root账户是被禁用的,为了安全起见,建议不要直接使用root账户登录图形界面。但是,如果出于特定的管理或维护需求,您可以按照以下步骤启用和使用root账户登录图形界面: 启用root账户…...

NPC逆变器模糊超螺旋滑模控制【附仿真】
✨ 长期致力于NPC型逆变器、滑模控制、超螺旋算法、模糊控制、电能质量优化研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)改进型超螺旋滑模变结构控…...

3分钟掌握GeoJSON.io:零代码地理数据可视化的革命性工具
3分钟掌握GeoJSON.io:零代码地理数据可视化的革命性工具 【免费下载链接】geojson.io A quick, simple tool for creating, viewing, and sharing spatial data 项目地址: https://gitcode.com/gh_mirrors/ge/geojson.io 还在为复杂的地理信息系统软件而烦恼…...

Lie群方法在机器人状态估计中的创新应用
1. 状态估计技术演进与Lie群方法的核心价值在机器人导航与定位领域,状态估计技术扮演着大脑的角色。想象一下,当你在陌生城市使用手机导航时,系统需要实时融合GPS、陀螺仪和加速度计的数据来确定你的位置——这正是状态估计的典型应用场景。传…...

Apple Mail自动化增强:JXA脚本与快捷指令提升邮件处理效率
1. 项目概述:一个为Apple Mail打造的现代化邮件客户端如果你和我一样,日常工作高度依赖邮件,并且是macOS生态的深度用户,那么Apple Mail(邮件.app)大概率是你的主力工具。它简洁、与系统深度集成、iCloud同…...

Java程序开发第七课
1. Java基础入门 Java特点:跨平台(JVM)、面向对象、健壮性(强类型、垃圾回收)。JDK、JRE、JVM关系: JDK (开发工具包) JRE 开发工具 (javac, java&#x…...

Cursor免费版高效使用指南:配置优化与本地工具链整合
1. 项目概述与核心价值最近在开发者圈子里,关于AI编程工具的讨论热度一直居高不下。Cursor作为一款深度集成AI能力的代码编辑器,凭借其强大的代码生成、理解和重构功能,迅速成为了许多程序员提升效率的“新宠”。然而,其Pro版本需…...

2026健康一体机生产厂家选型与厂商能力全景分析
2026健康一体机生产厂家选型与厂商能力全景分析健康一体机是一种集多项健康检测与管理功能于一体的智能终端设备,可快速完成身高、体重、血压、血糖、血氧、心率、心电、体温、BMI、脂肪含量、基础代谢率等基础体征测量。设备支持数据自动记录、建档、上传与智能分析…...

SRWE:Windows窗口实时编辑器的专业应用指南
SRWE:Windows窗口实时编辑器的专业应用指南 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 在数字内容创作和游戏开发领域,分辨率限制常常成为技术瓶颈。传统Windows窗口管理系统缺乏灵活…...

AIKit:基于容器的一站式开源大语言模型部署与微调平台
1. AIKit项目概述:一站式开源大语言模型部署与微调平台 如果你和我一样,在尝试将Llama、Mistral这类开源大语言模型(LLM)真正用起来时,被复杂的依赖、环境配置和性能优化搞得焦头烂额,那么AIKit的出现&…...

基于大语言模型的自动化股票研报生成系统设计与实现
1. 项目概述:当ChatGPT遇上股票研报最近几年,AI在金融领域的应用已经从简单的数据查询,进化到了能够进行复杂分析和生成专业报告的程度。我关注到一个挺有意思的项目,叫ddobokki/chatgpt_stock_report。光看这个名字,你…...