RWSENodeEncoder, KER_DIM_PE(lrgb文件中的encoders文件中的kernel.py)
该代码实现了一个基于核的节点编码器 KernelPENodeEncoder,用于在图神经网络中将特定的核函数编码(例如随机游走结构编码 RWSE)与节点特征相结合。通过将预先计算的核统计信息(如 RWSE 等)与原始节点特征结合,该编码器可以帮助模型捕捉图中节点的结构信息。该代码还定义了一个派生类 RWSENodeEncoder,这是一个具体实现,用于对节点执行随机游走结构编码。
编码器允许使用不同的模型(例如线性模型或 MLP)对核统计信息进行处理,并且支持根据需要对节点特征进行线性扩展。最终,节点特征和核特征被拼接成一个完整的节点嵌入。
from lrgb.encoders.kernel import RWSENodeEncoder, KER_DIM_PE
import torch
import torch.nn as nnKER_DIM_PE = 28
NUM_RW_STEPS = 20
MODEL = 'Linear'
LAYERS = 3
RAW_NORM_TYPE = 'BatchNorm'
PASS_AS_VAR = Falseclass KernelPENodeEncoder(torch.nn.Module):"""Configurable kernel-based Positional Encoding node encoder.The choice of which kernel-based statistics to use is configurable throughsetting of `kernel_type`. Based on this, the appropriate config is selected,and also the appropriate variable with precomputed kernel stats is thenselected from PyG Data graphs in `forward` function.E.g., supported are 'RWSE', 'HKdiagSE', 'ElstaticSE'.PE of size `dim_pe` will get appended to each node feature vector.If `expand_x` set True, original node features will be first linearlyprojected to (dim_emb - dim_pe) size and the concatenated with PE.Args:dim_emb: Size of final node embeddingexpand_x: Expand node features `x` from dim_in to (dim_emb - dim_pe)"""kernel_type = None # Instantiated type of the KernelPE, e.g. RWSEdef __init__(self, dim_in, dim_emb, expand_x=True):super().__init__()if self.kernel_type is None:raise ValueError(f"{self.__class__.__name__} has to be "f"preconfigured by setting 'kernel_type' class"f"variable before calling the constructor.")dim_pe = KER_DIM_PE # Size of the kernel-based PE embeddingnum_rw_steps = NUM_RW_STEPSmodel_type = MODEL.lower() # Encoder NN model type for PEsn_layers = LAYERS # Num. layers in PE encoder modelnorm_type = RAW_NORM_TYPE.lower() # Raw PE normalization layer typeself.pass_as_var = PASS_AS_VAR # Pass PE also as a separate variableif dim_emb - dim_pe < 0: # formerly 1, but you could have zero feature sizeraise ValueError(f"PE dim size {dim_pe} is too large for "f"desired embedding size of {dim_emb}.")if expand_x and dim_emb - dim_pe > 0:self.linear_x = nn.Linear(dim_in, dim_emb - dim_pe)self.expand_x = expand_x and dim_emb - dim_pe > 0if norm_type == 'batchnorm':self.raw_norm = nn.BatchNorm1d(num_rw_steps)else:self.raw_norm = Noneactivation = nn.ReLU # register.act_dict[cfg.gnn.act]if model_type == 'mlp':layers = []if n_layers == 1:layers.append(nn.Linear(num_rw_steps, dim_pe))layers.append(activation())else:layers.append(nn.Linear(num_rw_steps, 2 * dim_pe))layers.append(activation())for _ in range(n_layers - 2):layers.append(nn.Linear(2 * dim_pe, 2 * dim_pe))layers.append(activation())layers.append(nn.Linear(2 * dim_pe, dim_pe))layers.append(activation())self.pe_encoder = nn.Sequential(*layers)elif model_type == 'linear':self.pe_encoder = nn.Linear(num_rw_steps, dim_pe)else:raise ValueError(f"{self.__class__.__name__}: Does not support "f"'{model_type}' e相关文章:
)
RWSENodeEncoder, KER_DIM_PE(lrgb文件中的encoders文件中的kernel.py)
该代码实现了一个基于核的节点编码器 KernelPENodeEncoder,用于在图神经网络中将特定的核函数编码(例如随机游走结构编码 RWSE)与节点特征相结合。通过将预先计算的核统计信息(如 RWSE 等)与原始节点特征结合,该编码器可以帮助模型捕捉图中节点的结构信息。该代码还定义了…...

技术文档:基于微信朋友圈的自动点赞工具开发
概述 该工具是一款基于 Windows 平台的自动化操作工具,通过模拟人工点击,实现微信朋友圈的自动点赞。主要适用于需频繁维护客户关系的用户群体,避免手动重复操作,提高用户的互动效率。 官方地址: aisisoft.top 一、开发背景与技术…...

kubernetes_pods资源清单及常用命令
示例: apiVersion: v1 kind: Pod metadata:name: nginx-podnamespace: defaultlabels:app: nginx spec:containers:- name: nginx-containerimage: nginx:1.21ports:- containerPort: 80多个容器运行示例 apiVersion: v1 kind: Pod metadata:name: linux85-nginx-…...

科目二侧方位停车全流程
科目二侧方位停车是驾考中的重要项目,主要评估驾驶员将车辆准确停放在道路右侧停车位的能力。以下是对科目二侧方位停车的详细解析: 请点击输入图片描述(最多18字) 一、考试要求 车辆需在库前右侧稳定停车,随后一次性…...
2024源鲁杯CTF网络安全技能大赛题解-Round2
排名 欢迎关注公众号【Real返璞归真】不定时更新网络安全相关技术文章: 公众号回复【2024源鲁杯】获取全部Writeup(pdf版)和附件下载地址。(Round1-Round3) Misc Trace 只能说题出的太恶心了,首先获得一…...

10.24学习
1.const 在编程中, const 关键字通常用来定义一个常量。常量是程序运行期间其值不能被改变的变量。使用 const 可以提高代码的可读性和可靠性,因为它可以防止程序中意外修改这些值。 不同编程语言中 const 的用法可能略有不同,以下是一…...

社交媒体与客户服务:新时代的沟通桥梁
在数字化时代,社交媒体已成为人们日常生活中不可或缺的一部分,它不仅改变了人们的沟通方式,也深刻影响着企业的客户服务模式。从传统的电话、邮件到如今的社交媒体平台,客户服务的渠道正在经历一场前所未有的变革。社交媒体以其即…...

设置虚拟机与windows间的共享文件夹
在 VMware Workstation 或 VMware Fusion 中设置共享文件夹的具体步骤如下: 1. 启用共享文件夹 对于 VMware Workstation 打开 VMware Workstation: 启动 VMware Workstation,找到你要设置共享文件夹的虚拟机。 设置虚拟机: 选…...

微信小程序性能优化 ==== 合理使用 setData 纯数据字段
目录 1. setData 的流程 2. 数据通信 3. 使用建议 3.1 data 应只包括渲染相关的数据 3.2 控制 setData 的频率 3.3 选择合适的 setData 范围 3.4 setData 应只传发生变化的数据 3.5 控制后台态页面的 setData 纯数据字段 组件数据中的纯数据字段 组件属性中的纯数据…...
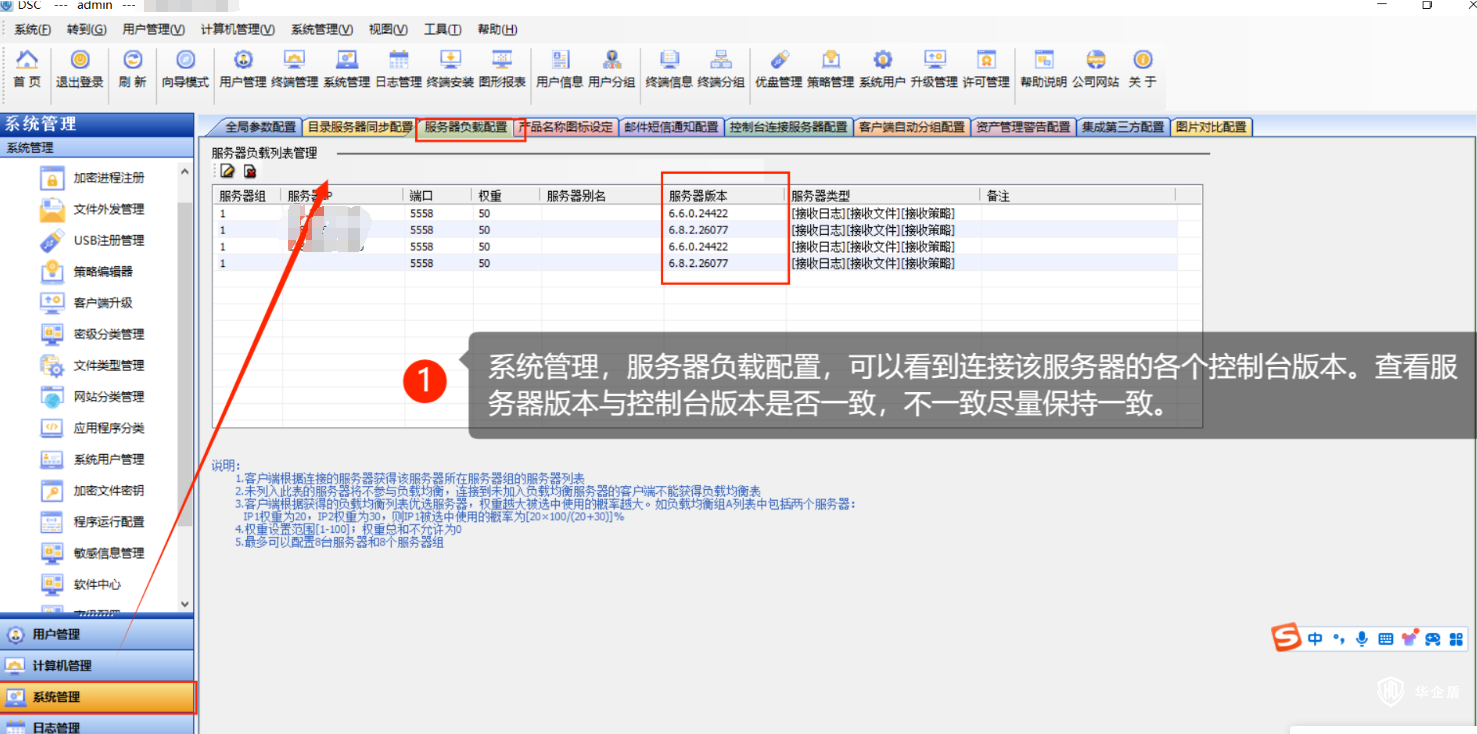
【加密系统】华企盾DSC服务台提示:请升级服务器,否则可能导致客户端退回到旧服务器的版本
华企盾DSC服务台提示:请升级服务器,否则可能导致客户端退回到旧服务器的版本 产生的原因:控制台版本比服务器高导致控制台出现报错 解决方案 方法:将控制台回退到原来的使用版本,在控制台负载均衡查看连接该服务器各个…...

直连南非,服务全球,司库直联再进一步
yonyou 在全球化经济背景下,中国企业不断加快“走出去”的步伐,寻求更广阔的发展空间。作为非洲大陆经济最发达的国家之一,南非以其丰富的自然资源、完善的金融体系和多元化的市场,成为中国企业海外投资与合作的热门目的地。 作为…...

【spring】从spring是如何避免并发下获取不完整的bean引发的思考 什么是双重检查锁 什么是java内存模型
本文将通过简述spring是如何避免并发下获取不完整的bean,延伸出双重检查锁、volatile、JMM的概念,将这些知识点都串联起来; 若发现错误,非常欢迎在评论区指出;csdn博主:孟秋与你 文章目录 双重检查锁(Doubl…...

【计算机网络一】网络学习前置知识
目录 网络中必备概念 1.什么是局域网与广域网? 2.什么是IP地址 3.什么是端口号 4.什么是协议 5.OSI七层模型 6.TCP/IP四层模型 网络中必备概念 本篇文章旨在分享一些计算机网络中的常见概念,对于初学者或者准备学习计算机网络的人会有帮助。 1.什么…...

nuScenes数据集使用的相机的外参和内参
因为需要用不同数据集测试对比效果,而一般的模型代码里实现的检测结果可视化都是使用open3d的Visualizer在点云上画的3d框,展示出来的可视化效果很差,可能是偷懒,没有实现将检测结果投影到各相机的图像上,所以检测效果…...

数据结构与算法:贪心算法与应用场景
目录 11.1 贪心算法的原理 11.2 经典贪心问题 11.3 贪心算法在图中的应用 11.4 贪心算法的优化与扩展 总结 数据结构与算法:贪心算法与应用场景 贪心算法是一种通过选择当前最佳解来构造整体最优解的算法策略。贪心算法在很多实际问题中都取得了良好的效果&am…...

音频编解码器音频文件格式
0 Preface/Foreword 1 音频编解码器 算法压缩越高,那么音频延迟越大,音频效果越好。 1.1 SBC SBC: sub-band coding,自带编码 A2DP强制规定使用的audio编解码器。 在音视频中,为了增加用户体验,规避视频和音频的不…...

FreeSWITCH JSON API
仅举几例: fs_cli -x json {"command" : "status", "data" : ""} fs_cli -x json {"command" : "sofia.status", "data" : ""} fs_cli -x json {"command" : "…...

学习docker第三弹------Docker镜像以及推送拉取镜像到阿里云公有仓库和私有仓库
docker目录 1 Docker镜像dockers镜像的进一步理解 2 Docker镜像commit操作实例案例内容是ubuntu安装vim 3 将本地镜像推送至阿里云4 将阿里云镜像下载到本地仓库5 后记 1 Docker镜像 镜像,是docker的三件套之一(镜像、容器、仓库)࿰…...

一文掌握Kubernates核心组件,构建智能容器管理集群
1.Kubernates简要概述 Kubernates(常称为K8s,因省略了“ubernate”中的8个字符)是Google开源的容器编排平台,专为简化和自动化应用服务的部署、扩展和管理而设计。它将应用与底层的服务器抽象开来,提供了自动化的机制…...

正则表达式快速入门
正则表达式是由一系列元字符(Meta-characters)组成的模式,用于定义搜索或替换文本的规则。元字符具有特殊含义,用于指定搜索模式的结构。以下是一些常用的正则表达式元字符及其功能: 字符匹配符 符号含义.匹配除 \r\…...

SignalTap调试进阶:巧用约束与别名捕获FPGA优化后的关键信号
1. 为什么优化后的信号会"消失"? 很多FPGA工程师都遇到过这样的场景:明明在代码里明确定义了reg和wire信号,但在SignalTap里死活找不到它们的身影。这其实不是工具出了问题,而是Quartus的综合优化在"作怪"。…...

终极指南:League-Toolkit 如何彻底解决极地大乱斗抢英雄难题
终极指南:League-Toolkit 如何彻底解决极地大乱斗抢英雄难题 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League-Toolkit 是一款…...

SwiftHTTP文件上传完全指南:从基础到企业级应用
SwiftHTTP文件上传完全指南:从基础到企业级应用 【免费下载链接】SwiftHTTP Thin wrapper around NSURLSession in swift. Simplifies HTTP requests. 项目地址: https://gitcode.com/gh_mirrors/sw/SwiftHTTP 在iOS和macOS开发中,SwiftHTTP文件上…...

一键解锁B站缓存视频:从平台依赖到个人数字资产管理的智能方案
一键解锁B站缓存视频:从平台依赖到个人数字资产管理的智能方案 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 在数字内容瞬息万变的…...

从FastCAE到你的项目:深度解析SARibbon控件在工业软件中的实战应用与避坑指南
从FastCAE到你的项目:深度解析SARibbon控件在工业软件中的实战应用与避坑指南 工业软件界面开发从来不是简单的UI堆砌,而是对工程效率与用户体验的极致追求。在CAE、CAD等专业领域,一个优秀的Ribbon控件往往能成为提升工程师工作效率的隐形利…...

终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验
终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macOS上…...

X鱼屏蔽codex后,我的优质token粮仓告急
自从codex被X鱼全面封杀下架,我的优质token来源就又少了关键来源渠道了,多么怀念40元90刀每天额度月卡,30元1000刀的日子,看着其它中转站那些0.15元/刀,0.3元/刀,百万token等于4刀左右吧。一点兴趣都没有&a…...

ClawGuard Web:构建AI技能安全扫描平台,从代码安全到信任生态
1. 项目概述:ClawGuard Web 安全技能注册平台如果你在 OpenClaw 生态里开发或使用技能,那你肯定遇到过这个头疼的问题:从 ClawHub 或者 GitHub 上找到一个看起来不错的技能,但心里总犯嘀咕——这代码里会不会藏着恶意后门…...
终极指南:3分钟掌握Translumo实时屏幕翻译工具,游戏外语学习两不误
终极指南:3分钟掌握Translumo实时屏幕翻译工具,游戏外语学习两不误 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.com/gh_mirrors/tr…...
)
AI原生运维体系必须跨越的3道生死线:数据治理、模型可观测性、人机协同SLA(SITS 2026闭门研讨纪要)
更多请点击: https://intelliparadigm.com 第一章:AI原生运维体系构建:SITS 2026智能运维专场精华 AI原生运维(AIOps Native)已从概念验证迈入生产就绪阶段。SITS 2026智能运维专场首次提出“感知-推理-执行-进化”四…...