OAK相机的RGB-D彩色相机去畸变做对齐
▌低畸变标准镜头的OAK相机RGB-D对齐的方法
OAK相机内置的RGB-D管道会自动将深度图和RGB图对齐。其思想是将深度图像中的每个像素与彩色图像中对应的相应像素对齐。产生的RGB-D图像可以用于OAK内置的图像识别模型将识别到的2D物体自动映射到三维空间中去,或者产生的RGB-D图像用于产生彩色点云数据。默认情况下,在立体匹配过程中,深度与校正后的左图像对齐。

立体深度节点提供了现成的对齐功能。该节点接收一对立体图像(左右相机图像),并输出一个深度图。默认情况下,深度图与校正后的左图像对齐,可以通过以下方法设置彩色相机和深度图对齐。
stereo.setDepthAlign(dai.CameraBoardSocket.RGB) # 彩色相机和深度图对齐的功能
▌大广角系列相机的彩色相机和深度图对齐产生RGB-D的方法
当使用广角OAK相机时,由于镜头造成的图像的大失真,对齐可能会很棘手。默认情况下,深度图和左右相机是能够矫正到没有畸变的水平状态,但是彩色图像是没有去畸变的。这可能会导致两个图像对齐以后的错位。为了解决这个问题,彩色图像也需要去畸变。
目前OAK相机内置了彩色相机去畸变的节点,是可以在相机内去除畸变后和深度图对齐,生产RGB-D的效果
cam = pipeline.create(dai.node.Camera)
cam.setBoardSocket(dai.CameraBoardSocket.RGB)
cam.setMeshSource(dai.CameraProperties.WarpMeshSource.CALIBRATION)
也可以通过opencv的方式手动去畸变
alpha = 0
stereo.setAlphaScaling(alpha)
rgb_w = camRgb.getResolutionWidth()
rgb_h = camRgb.getResolutionHeight()
rgbIntrinsics = np.array(calibData.getCameraIntrinsics(rgbCamSocket, rgb_w, rgb_h))
rgb_d = np.array(calibData.getDistortionCoefficients(rgbCamSocket))
rgb_new_cam_matrix, _ = cv2.getOptimalNewCameraMatrix(rgbIntrinsics, rgb_d, (rgb_w, rgb_h), alpha)
map_x, map_y = cv2.initUndistortRectifyMap(rgbIntrinsics, rgb_d, None, rgb_new_cam_matrix, (rgb_w, rgb_h), cv2.CV_32FC1)
frameRgb = cv2.remap(frameRgb, map_x, map_y, cv2.INTER_LINEAR)
当将rgb相机畸变矫正后,图像的边缘不平直的部分会被裁切掉一部分。这导致了FOV的损失。为了最大化FOV,可以使用alpha参数[0-1]来缩放未扭曲的图像,让裁切的部分尽量小一点。
stereo.setAlphaScaling(alpha)
alpha = 0 -无缩放,未失真的图像将与原始图像的大小相同。

alpha = 1 -最大缩放,未失真的图像将是适合原始图像的最大可能的图像。

相关文章:
OAK相机的RGB-D彩色相机去畸变做对齐
▌低畸变标准镜头的OAK相机RGB-D对齐的方法 OAK相机内置的RGB-D管道会自动将深度图和RGB图对齐。其思想是将深度图像中的每个像素与彩色图像中对应的相应像素对齐。产生的RGB-D图像可以用于OAK内置的图像识别模型将识别到的2D物体自动映射到三维空间中去,或者产生的…...

smartctl硬盘检查工具
一、smartctl工具简介 Smartmontools是一种硬盘检测工具,通过控制和管理硬盘的SMART(Self Monitoring Analysis and Reporting Technology),自动检测分析及报告技术)技术来实现的,SMART技术可以对硬盘的磁头单元、盘片电机驱动系统、硬盘…...

清空MySQL数据表
要清空 MySQL 数据表,您可以使用 TRUNCATE 或 DELETE 命令 使用 TRUNCATE 命令 TRUNCATE 命令用于删除表中的所有数据,并重置自增 ID(如果存在): TRUNCATE TABLE table_name;将 table_name 替换为您要清空的表的名称…...
2024年妈杯MathorCup大数据竞赛A题超详细解题思路
2024年妈杯大数据竞赛初赛整体难度约为0.6个国赛。A题为台风中心路径相关问题,为评价预测问题;B题为库存和销量的预测优化问题。B题难度稍大于A题,可以根据自己队伍情况进行选择。26日早六点之前发布AB两题相关解题代码论文。 下面为大家带来…...

Kafka系列之:Kafka集群磁盘条带划分和Kafka集群磁盘扩容详细方案
Kafka系列之:Kafka集群磁盘条带划分和Kafka集群磁盘扩容详细方案 一、lsblk命令二、Kafka节点磁盘条带化方案一三、Kafka节点磁盘条带化方案二四、理解逻辑区块LE五、查看kafka节点磁盘条带划分情况六、Kafka节点磁盘扩容一、lsblk命令 lsblk命令用于列出块设备的信息,包括磁…...

【LeetCode】修炼之路-0007- Reverse Integer (整数反转)【python】
题目 Reverse Integer Given a signed 32-bit integer x, return x with its digits reversed. If reversing x causes the value to go outside the signed 32-bit integer range [-231, 231 - 1], then return 0. Assume the environment does not allow you to store 64-b…...
)
【Flutter】页面布局:线性布局(Row 和 Column)
在 Flutter 中,布局(Layout)是应用开发的核心之一。通过布局组件,开发者可以定义应用中的控件如何在屏幕上排列。Row 和 Column 是 Flutter 中最常用的两种线性布局方式,用于水平和垂直排列子组件。在本教程中…...
)
C语言巨难题:执行操作可获得的最大总奖励 I(C语言版)
1.题目: 给你一个整数数组 rewardValues,长度为 n,代表奖励的值。 最初,你的总奖励 x 为 0,所有下标都是 未标记 的。你可以执行以下操作 任意次 : 从区间 [0, n - 1] 中选择一个 未标记 的下标 i。如果…...

【力扣】GO解决子序列相关问题
文章目录 一、引言二、动态规划方法论深度提炼子序列问题的通用解法模式 三、通用方法论应用示例:最长递增子序列(LeetCode题目300)Go 语言代码实现 四、最长连续递增序列(LeetCode题目674)Go 语言代码实现 五、最长重…...

Ubuntu20.04安装VM tools并实现主机和虚拟机之间文件夹共享
1、Ubuntu20.04安装VM tools 参考这个,很详细:Ubuntu 20.04 安装 VMwareTools 教程 2、实现主机与VMware虚拟机共享文件夹 设置共享文件夹参考:windows和虚拟机互传文件的三种方式 挂载操作参考:主机与VMware虚拟机共享文件夹&…...
—— 文件系统)
Linux 学习笔记(十七)—— 文件系统
终极目标:理解 inode 和 软硬连接; 文件系统:Ext2; 文件 文件内容 文件属性; ——> 磁盘上存储的文件 存储的文件内容 存储的文件属性; Linux系统中:文件内容使用数据块存储,文件属性使用inode(固定…...
)
【计算机网络 - 基础问题】每日 3 题(五十八)
✍个人博客:https://blog.csdn.net/Newin2020?typeblog 📣专栏地址:http://t.csdnimg.cn/fYaBd 📚专栏简介:在这个专栏中,我将会分享 C 面试中常见的面试题给大家~ ❤️如果有收获的话,欢迎点赞…...

Netty入门基础:IO模型中BIO\NIO概念及区别【附演示代码】
文章目录 😀BIO💢实战demo 🌈NIO🏍Buffer核心属性核心方法 🎗Channel🎈Selector核心方法 🧨实战demo 🎨粘包与半包 😀BIO 传统IO模型,同步阻塞,每…...

vue2 使用环境变量
一. 在根目录下创建.env.xxx文件 .env 基础系统变量,无论何种环境,都可使用其中配置的值,其他环境中的变量会覆盖.env中的同名变量。 .env.development 开发环境 .env.production 生产环境 .env.staging 测试环境 二. 内容格式 vue2 使用是以…...

数据预处理
继续提取代码片段: 12. **导入iris数据集并查看前5行数据**: python from sklearn.datasets import load_iris iris load_iris() X iris.data print(iris数据集的维度为:, X.shape) print(iris数据集的前5行数据为:\n, X[:5]) …...

django宠物领养管理系统-计算机毕业设计源码26858
目录 1 绪论 1.1 选题背景与意义 1.2国内外研究现状 1.3论文结构与章节安排 2系统分析 2.1 可行性分析 2.2 系统流程分析 2.2.1 数据流程 3.3.2 业务流程 2.3 系统功能分析 2.3.1 功能性分析 2.3.2 非功能性分析 2.4 系统用例分析 2.5本章小结 3 系统总体设计 3…...

使用TeamViewer远程局域网内的两台电脑
有个场景,有人还不知道TV可以局域网操作,记录一下。 主要就是修改设置,将取消激活改为接受 然后输入受控端的ip即可...

GUI简介、Swing的常用组件、java程序的运行过程、class文件、JAR、runable_jar、双括号初始化
GUI简介 GUI:图形用户界面,在计算机中采用图形的方式显示用户界面 java的GUI开发 AWT:java最早推出的GUI编程开发包,界面风格跟随操作系统SWT:eclipse就是java使用SWT开发的Swing:在AWT的基础上扩充了功能…...
区别)
@Autowired和@Resource和getBean()区别
今天遇到一个对我来说很奇葩的错误,我想在Service中注入bean,我这里使用了Autowired和Resource都不能注入,导致初始化失败,使用了getBean()方法就可以注入。从来没有遇到过这个问题。后来我查询了一下,才明白了原理。我…...
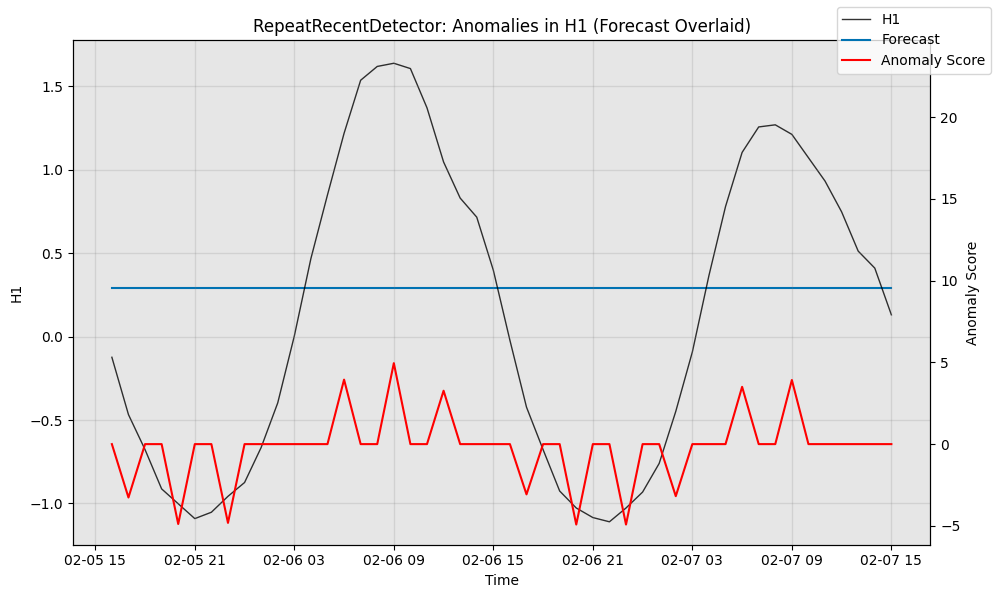
Merlion笔记(四):添加一个新的预测模型
文章目录 1 模型配置类2 模型类3 运行模型:一个简单的例子4 可视化5 定量评估6 定义一个基于预测器的异常检测器 本文提供了一个示例,展示如何向 Merlion 添加一个新的预测模型,遵循 CONTRIBUTING.md 中的说明。建议在阅读本篇文章之前,先查…...

本地优先 Web 应用开发:React/SQLite 前端、Supabase 后端与 PowerSync 同步引擎实践
本地优先 Web 应用开发:React/SQLite 前端、Supabase 后端与 PowerSync 同步引擎的实践与优势并非每天都会出现全新架构,如今浏览器内的 SQLite 结合响应式 SQL 和自动同步功能出现了,它能让前端即时交互,还能保持与后端数据一致&…...
)
告别繁琐配置:Jprotobuf注解驱动序列化实战(新手友好)
1. 为什么选择Jprotobuf注解方案 如果你正在用Java开发需要频繁序列化数据的应用,比如缓存系统、微服务通信或者游戏服务器,肯定遇到过这样的纠结:用JSON虽然方便但性能差体积大,用Protobuf性能好但配置太麻烦。我去年做电商订单系…...

基于T4技术栈的现代全栈应用开发实践与最佳实践解析
1. 项目概述:一个现代全栈应用的原型与起点最近在GitHub上看到一个挺有意思的项目,叫timothymiller/t4-app。乍一看这个名字,可能有点摸不着头脑,但点进去你会发现,这其实是一个精心设计的全栈Web应用模板。它不是某个…...

终极网盘直链下载助手完整指南:免费解锁八大平台高速下载
终极网盘直链下载助手完整指南:免费解锁八大平台高速下载 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天…...

期刊论文发表难破局:虎贲等考 AI 以真文献 + 强实证,大幅提升录用率
在职称评审、毕业要求、科研考核的多重压力下,期刊论文早已成为硬指标。可现实是:投稿容易录用难,初审因选题、文献、实证、格式任意一点不合格就被拒稿,返修反复消耗数月。通用 AI 只能堆砌文字、编造来源,普通工具仅…...

大模型压缩实战:量化、剪枝与蒸馏技术解析与AngelSlim应用
1. 项目概述:从“大”到“小”的模型压缩革命最近在模型部署和推理优化的圈子里,Tencent/AngelSlim 这个项目被讨论得挺多。简单来说,它不是一个全新的模型,而是一套由腾讯开源的、专门用于大语言模型(LLM)…...
)
STM32L4低功耗实战:用RTC内部唤醒定时1秒,让设备续航翻倍(附CubeIDE配置)
STM32L4低功耗实战:RTC唤醒中断与CubeIDE配置全解析 在电池供电的物联网终端设计中,每微安电流都关乎产品寿命。曾有个智能农业项目,原本预计6个月的传感器续航,因未优化低功耗模式,实际仅维持了3周。这促使我们深入研…...

首次接入Taotoken时如何通过模型广场测试不同模型的响应效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 首次接入Taotoken时如何通过模型广场测试不同模型的响应效果 当你开始使用Taotoken平台,面对众多可选的模型࿰…...

保姆级教程:用Intel官方工具搞定Realsense D435深度不准和黑点问题
深度视觉优化实战:Intel RealSense D435深度校准全流程解析 刚拆封的RealSense D435摄像头在深度模式下出现零星黑点?深度图某些区域数值明显失真?这些问题往往不是硬件缺陷,而是出厂校准参数与实际使用环境不匹配导致的。作为计算…...

AI技能包实战:用cc-skills打造专业级AI编程助手
1. 项目概述:为你的AI助手装上“专业工具箱”如果你和我一样,每天都在和Claude、Cursor、Copilot这类AI编程助手打交道,那你肯定遇到过这样的场景:想让AI帮你写一篇符合公司技术博客规范的PR稿,或者生成一段精准的Prom…...