【UE5】将2D切片图渲染为体积纹理,最终实现使用RT实时绘制体积纹理【第六篇-阶段总结篇】
因为马上就要进入下一个阶段,制作动态编辑体积纹理的模块。
但在这之前,要在这一章做最后一些整理。
- 首先,我们完成没完成的部分。
- 其次,最后整理一下图表。
- 最后,本文附上正在用的贴图
完善Shader
还记得我们之前注释掉了"阶梯纹理修复"的部分吗?


在第二章第七节中,我们已经修复了这个阶梯纹理。
CurPos += LocalCamVec * (1 - FinalStepSize);//只留了它
然而,在第三章对Shader进行大幅修改时,我们暂时将其注释掉并未继续处理。现在,我们将重新着手修复这个阶梯纹理问题。
希望你还记得,修复阶梯纹理的原理是将for循环的一步单独再以一个小步FinalStepSize执行一次。
因此,基本上就是将for循环中的内容复制出来,在for之后再运行一次。
//创建变量,从0开始累加沿相机方向步进过程中的总密度
float accumdens = 0;//Shadow部分
//创建变量,透射率和光线的能量
float transmittance =1;
float3 lightenergy = 0;
//基本和相机方向步进一样,但这些都是常量,不需要写进for里
Density *= StepSize;
LightVector *= ShadowStepSize;
ShadowDensity *= ShadowStepSize;
//一个对数来计算阈值,用来判断光线是否还值得计算
float shadowthresh = -log(ShadowThreshold)/ShadowDensity;//使用 MaxSteps 作为最大步数进行循环,每次循环执行以下操作
for (int i = 0; i < MaxSteps; i++)
{float cursample = PseudoVolumeTexture(Tex, TexSampler, saturate(CurPos), XYFrames, NumFrames).r;// 在当前步进位置进行纹理采样//Shadow部分if(cursample > 0.001)//如果采样位置没有密度,则跳过{float3 Lpos = CurPos;//Lpos将作为光线步进的起始位置float shadowdist = 0;//和之前的accumdens一样,积累阴影//自阴影for(int s = 0; s < ShadowSteps; s++){Lpos += LightVector;//移动步进位置float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样//判断是否在框内,不是则直接break退出forfloat3 shadowboxtest = floor( 0.5+ (abs(0.5-Lpos)));//float exitshadowbox = shadowboxtest.x + shadowboxtest.y + shadowboxtest.z;float exitshadowbox = dot(shadowboxtest,1);//简短的通道相加if(shadowdist > shadowthresh || exitshadowbox >= 1) break;shadowdist += Lsample;//累计}//接收阴影float3 dfpos = 2 * (CurPos -0.5) * LocalObjectBoundsMax;//-0.5 * 2,得到一个居中的Bounddfpos = LWCToFloat(TransformLocalPositionToWorld(Parameters,dfpos)) - CameraPosWS;//将dfpos转换为世界空间,需要LWC精度所以在代码里转换,减去相机位置float dftracedist = 1; //创建四个变量float dfshadow = 1;//这是我们最终要的float curdist = 0;float DistanceAlongTrace = 0;for (int d = 0; d < DFSSteps; d++)//又一次的光线步进{DistanceAlongTrace += curdist;//增加距离curdist = GetDistanceToNearestSurfaceGlobal(dfpos);//采样全局距离场,他和蓝图里`DistanceToNearestSurface`是相同函数float SphereSize = DistanceAlongTrace * LightTangent;//采样距离场软阴影的球形距离dfshadow = min( saturate(curdist/SphereSize),dfshadow);//用小于它的结果来更新变量dfpos.xyz += LightVectorWS * dftracedist * curdist;//继续移动位置dftracedist *= 1.0001;//增加一个很小的因子}//更新样本和光能,算法是BeersLaw函数cursample = 1 -exp(-cursample * Density);lightenergy += exp(-shadowdist * ShadowDensity) * cursample * transmittance * LightColor * dfshadow;//在结果上乘dfshadowtransmittance *= 1-cursample;//环境光照部分shadowdist = 0;//重置一下阴影距离,继续利用它计算光照Lpos = CurPos + float3(0,0,0.025);//新位置float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.05);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.15);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;//采样shadowdist += Lsample;lightenergy += exp(-shadowdist * AmbientDensity) *cursample * SkyColor * transmittance;//累计到光}CurPos += -LocalCamVec;
}CurPos += LocalCamVec * (1 - FinalStepSize);
float cursample = PseudoVolumeTexture(Tex, TexSampler, saturate(CurPos), XYFrames, NumFrames).r;//从上面复制过来,使用 FinalStepSize 结果再 Step 一次,进行阶梯修复if(cursample > 0.001){float3 Lpos = CurPos;float shadowdist = 0;for(int s = 0; s < ShadowSteps; s++){Lpos += LightVector;float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;float3 shadowboxtest = floor( 0.5+ (abs(0.5-Lpos)));float exitshadowbox = dot(shadowboxtest,1);if(shadowdist > shadowthresh || exitshadowbox >= 1) break;shadowdist += Lsample;}float3 dfpos = 2 * (CurPos -0.5) * LocalObjectBoundsMax;dfpos = LWCToFloat(TransformLocalPositionToWorld(Parameters,dfpos)) - CameraPosWS;float dftracedist = 1; float dfshadow = 1;float curdist = 0;float DistanceAlongTrace = 0;for (int d = 0; d < DFSSteps; d++){DistanceAlongTrace += curdist;curdist = GetDistanceToNearestSurfaceGlobal(dfpos);float SphereSize = DistanceAlongTrace * LightTangent;dfshadow = min( saturate(curdist/SphereSize),dfshadow);dfpos.xyz += LightVectorWS * dftracedist * curdist;dftracedist *= 1.0001;}cursample = 1 -exp(-cursample * Density);lightenergy += exp(-shadowdist * ShadowDensity) * cursample * transmittance * LightColor * dfshadow;transmittance *= 1-cursample;shadowdist = 0;Lpos = CurPos + float3(0,0,0.025);float Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.05);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;shadowdist += Lsample;Lpos = CurPos + float3(0,0,0.15);Lsample = PseudoVolumeTexture(Tex, TexSampler, saturate(Lpos), XYFrames, NumFrames).r;shadowdist += Lsample;lightenergy += exp(-shadowdist * AmbientDensity) *cursample * SkyColor * transmittance;}return float4(lightenergy, transmittance);
整理图表
老样子,我们做整理,消除意大利面可以让我们更直观的感受shader中的各种关系
-
将这一部分
RayMarching的参数折叠为RayMarchingParameter


-
打包环境和常量参数
Constant


-
整理自阴影距离场的变量
SelfShadow


-
打包投影的参数
ShadowRayParameter


-
最后整理一下
ShadowRayMarching输入顺序,按功能排序

当前Shader
抄抄党注目
模型

长宽高100cm,轴居中,双面双材质ID的Cube模型
本文附下载
预览贴图

长宽高100cm,轴居中,双面双材质ID的Cube模型。
本文附下载
材质球
M_VolRayMarching
MI_VolRayMarching
MI_VolRayMarching_Shadow

M_VolRayMarching
细节

图表

MI_VolRayMarching
父材质为M_VolRayMarching
MI_VolRayMarching_Shadow
父材质为MI_VolRayMarching
- 细节:

相关文章:
【UE5】将2D切片图渲染为体积纹理,最终实现使用RT实时绘制体积纹理【第六篇-阶段总结篇】
因为马上就要进入下一个阶段,制作动态编辑体积纹理的模块。 但在这之前,要在这一章做最后一些整理。 首先,我们完成没完成的部分。其次,最后整理一下图表。最后,本文附上正在用的贴图 完善Shader 还记得我们之前注…...

地球村上一些可能有助于赚钱的20个思维方式
地球村上一些可能有助于赚钱的20个思维方式: 1. 目标导向思维:明确自己的财务目标,并制定详细、可执行的计划来逐步实现。 2. 创新思维:不断寻求新的商业机会和独特的解决方案,以在竞争激烈的市场中脱颖而出。 3. 价值…...

0基础入门matlab
目录 一、命令 二、变量命名 三、数据类型 数字 字符和字符串 矩阵 rand、randi和randn的区别? 元胞数组和结构体 MAGIC 结构体 四、矩阵构造、四则运算、矩阵下标 五、MATLAB逻辑与流程控制 六、MATLAB绘图 二维平面绘图 三维平面绘图 导出图片 内…...

【前端】实操tips集合
1. 关闭vue中组件名字的多词校验 (1) package.json文件中修改eslint配置 "eslintConfig": {"rules": {"vue/multi-word-component-names":"off" }}, (2).eslintrc.js或者.eslintrc配置文件中进行配置 modu…...

基于Springboot+Vue 传统文化管理系统(源码+LW+部署讲解+数据库+ppt)
!!!!!!!!! 会持续一直更新下去 有问必答 一键收藏关注不迷路 源码获取:https://pan.baidu.com/s/1aRpOv3f2sdtVYOogQjb8jg?pwdjf1d 提取码: jf1d &#…...

质量漫谈一
我知道很多同学看到这类问题,第一反应想要去寻找的就是作为测试角色,应该要如何如何去做?但是今天这里作为质量第一篇,不打算按照这样单角度去写,这类同学可以就此打住,如果在意的话,可关注后续…...

个体化神经调控 Neurolnavigation介绍
神经调控技术包括DBS, TMS, rTMS, tDCS等等。今天主要说一下TMS。 TMS全程经颅磁刺激,通过对头皮放置磁场线圈,可以定向的往局部头皮发送脉冲信号,抑制局部神经元活动。 TMS的优点是精准刺激,tDCS的优点是刺激范围比较宽泛。近期有…...

02-RT1060 双ADC采样+eDMA传输
RT1060-双ADC+eDMA外设的配合使用 该项目是基于MIMXRT1060-EVKB官方开发板编写的驱动。 一、头文件包含介绍 #include "pin_mux.h" #include "clock_config.h" #include "board.h" #include "fsl_adc.h" #include "fsl_adc_et…...

单值集合总复习
1:Object类的核心方法复习 Object 是所有类【引用数据类型】的 直接 / 间接 父类 toString(): 将一个 引用数据类型的对象 转换成 String 类型 class Object{//Sun //toString()不需要参数:将一个对象转换成字符串 将调用者转换成字符串 public String …...

Pyside6 布局管理器(4)--- QGridLayout的使用
一、QGridLayout的介绍(官翻) QGridLayout 获得可用的空间(由其父布局或 parentWidget() 提供),将其划分为行和列,并将其管理的每个小部件放入正确的单元格中。 列和行的行为是相同的;我们将…...
从GPT定制到Turbo升级再到Assistants API,未来AI世界,你准备好了吗?
引言 在OpenAI DevDay发布会上,OpenAI再次震撼整个人工智能行业,为AI领域带来了重大的更新。CEO Sam Altman宣布推出了定制版本的ChatGPT,这意味着用户现在可以根据自己的需求打造个性化的GPT,并分享至GPT Store。这一消息对于受…...
「漏洞复现」BladeX企业级开发平台 tenant/list SQL 注入漏洞复现(CVE-2024-33332)
0x01 免责声明 请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息而造成的任何直接或者间接的后果及损失,均由使用者本人负责,作者不为此承担任何责任。工具来自网络,安全性自测,如有侵权请联系删…...

基于SSM的消防物资存储系统【附源码】
基于SSM的消防物资存储系统 效果如下: 用户功能界面 仓库管理界面 物资入库管理界面 物资出库管理界面 物资详情管理界面 报警通知管理界面 安全检查提醒管理界面 管理员功能界面 研究背景 21世纪,我国早在上世纪就已普及互联网信息,互联网…...
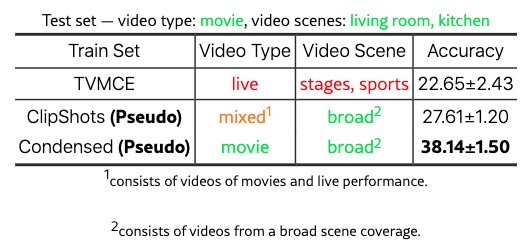
Pseudo Multi-Camera Editing 数据集:通过常规视频生成的伪标记多摄像机推荐数据集,显著提升模型在未知领域的准确性。
2024-10-19,由伊利诺伊大学厄巴纳-香槟分校和香港城市大学的研究团队提出了一种创新方法,通过将常规视频转换成伪标记的多摄像机视角推荐数据集,有效解决了在未知领域中模型泛化能力差的问题。数据集的创建,为电影、电视和其他媒体…...

认识一下 Mochi-1--最新的免费开源人工智能视频模型
Genmo 是一家专注于视频生成的人工智能公司,该公司宣布发布 Mochi 1 的研究预览版。Mochi 1 是一种新的开源模型,可根据文本提示生成高质量视频,其性能可与 Runway 的 Gen-3 Alpha、Luma AI 的 Dream Machine、Kuaishou 的 Kling、Minimax 的…...

Spring 的事务传播机制
Spring 的事务传播机制定义了一个事务方法在遇到已经存在的事务时如何处理。事务传播属性(Propagation)提供了七种机制,以适应不同的业务需求和事务边界管理。 1. Spring 的事务传播机制的类型 (1)REQUIREDÿ…...
线性代数(1)——线性方程组的几何意义
线性代数的基本问题是求解个未知数的个线性方程; 例如:(方程1)。 在线性代数的第一讲中,我们从Row Picture、Column Picture、Matrix Picture三个角度来看这个问题。 上面的系统是二维的。通过添加第三个变量&#…...

写给自己的一些心得体会
为什么是CSDN??? 最近跑实验跑得绝望,感觉自己兜兜转转走了太多太多的弯路,我不知道这样的弯路什么时候是个尽头,就像在USJ排队,看似好像要到入口了,实则一转头还是无尽绵延的队伍。走了这么多弯路,总要…...

论文阅读(二十九):Multi-scale Interactive Network for Salient Object Detection
文章目录 Abstract1.Introduction2.Scale VariationProposed Method3.1Network Overview3.2Aggregate Interaction Module3.3 Self-Interaction Module3.4Consistency-Enhanced Loss 4.Experiments4.1Implementation Details4.2 Comparison with State-of-the-arts4.3Ablation …...

常见存储器及其特点
: 一、只读存储器(ROM)及其类型 1. ROM 特点:存储的数据固定不变,只能读出不能写入,且断电后数据不丢失。应用:通常用于存储系统程序,如BIOS等。 2. PROM(可编程只读…...

光刻热点修复技术:提升芯片良率的关键方法
1. 光刻热点修复技术概述在45nm及更先进工艺节点下,光刻热点(Litho hotspot)已成为制约集成电路良率提升的关键因素之一。这类问题区域在传统设计规则检查(DRC)中往往难以被完全捕捉,因为它们本质上是由复杂…...
:创建技能)
OpenClaw从入门到应用——工具(Tools):创建技能
通过OpenClaw实现副业收入:《OpenClaw赚钱实录:从“养龙虾“到可持续变现的实践指南》 简介 OpenClaw 被设计为易于扩展。“技能”是向你的助手添加新能力的主要方式。 什么是技能? 一个技能是一个目录,其中包含一个 SKILL.md…...

5分钟掌握Typora插件:从文件管理小白到高效写作达人的3步法
5分钟掌握Typora插件:从文件管理小白到高效写作达人的3步法 【免费下载链接】typora_plugin Typora plugin. Feature enhancement tool | Typora 插件,功能增强工具 项目地址: https://gitcode.com/gh_mirrors/ty/typora_plugin 你是否曾在Typora…...

从单点到集群:我的SkyWalking 6.6.0 + ES7 + Nacos生产环境平滑升级踩坑记
从单点到集群:SkyWalking 6.6.0 ES7 Nacos生产环境平滑升级实战指南 去年春天,我们的电商大促监控系统突然告警——单节点SkyWalking服务器在流量洪峰下频繁崩溃。那一刻,我意识到单点架构已经成为业务增长的瓶颈。经过三个月的方案验证和灰…...

茉莉花插件:重塑你的中文文献研究新范式
茉莉花插件:重塑你的中文文献研究新范式 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum 作为一名学术研究者ÿ…...

网络优化工具开发全解析:从协议选型到多平台实现与运维
1. 网络连接优化工具的技术原理与实现思路在当今的互联网环境下,许多用户会遇到访问特定在线服务或资源时速度缓慢、连接不稳定甚至无法访问的情况。这背后通常涉及到复杂的网络路由、地域性内容分发策略以及网络基础设施的差异。为了解决这类问题,一些开…...

webpack-starter 终极指南:如何快速使用 ESLint 和 Stylelint 提升前端代码质量
webpack-starter 终极指南:如何快速使用 ESLint 和 Stylelint 提升前端代码质量 【免费下载链接】webpack-starter ✨ A lightweight foundation for your next webpack based frontend project. 项目地址: https://gitcode.com/gh_mirrors/we/webpack-starter …...

长期项目使用Taotoken按Token计费模式带来的成本优化体感
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期项目使用Taotoken按Token计费模式带来的成本优化体感 1. 项目背景与计费模式选择 我们团队维护着一个中等规模的AI应用项目&a…...

[CAN BUS] 从开源到商用:USB-CAN适配器选型避坑指南与稳定性深度剖析
1. 为什么USB-CAN适配器选型这么重要? 如果你正在开发汽车电子、工业控制或者机器人项目,大概率会用到CAN总线。作为嵌入式工程师,我最开始接触CAN总线时,天真地以为随便买个USB转CAN的工具就能搞定。结果在实际项目中踩了不少坑—…...

通过Taotoken CLI工具一键配置团队所有成员的开发环境
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken CLI工具一键配置团队所有成员的开发环境 当团队开始使用多个大模型进行开发时,为每位成员逐一配置API密钥…...