1.机器人抓取与操作介绍-深蓝学院
介绍

操作任务
操作
• Insertion
• Pushing and sliding
• 其它操作任务

抓取
• 两指(平行夹爪)抓取
• 灵巧手抓取

7轴
Franka
对应人的手臂

6轴 UR构型去掉一个自由度
课程大纲
Robotic Manipulation 操作
• Robotic manipulation refers to the ways robots interact with the objects around them
Manipulation is hard
• Arm, hand, eyes协作
• 一般manipulation问题 -> 有限的manipulation问题 -> 参数化manipulation问题
• 通用grasping -> 静态grasping

机器人抓取的进化

落地和挑战


1.1 机器人运动规划控制方法介绍

对比:
• 感知需求:自动驾驶的场景更复杂,机器人识别精度要求更高;
• 无决策&预测模块,无定位&地图模块;
• 规划器:机器人要求6DoF规划,笛卡尔到关节空间,更有挑战性;
• 控制:机器人要求力控,精细操作要求复杂。
机器人场景众多且分散,是否更加具有挑战需要看具体场景需求以及量化指标
Notation of Rigid Body

Rotation
常见表示
• 旋转矩阵 SO(3):3 × 3 matrix
• 欧拉角:3 × 1 vector,
• 四元数:4 × 1 vector, (x, y, z, w)
• 轴角: 3 × 1 vector(轴)+ scaler (角)
对于四种表示的可逆和组合形状需要牢记

- 万向锁
- (pitch 90度时roll和yaw的motion一致)
- RPY顺序,当\beta为90度时,
- 物理上,来自旋转顺序
自身旋转和固定坐标系旋转
p 右乘(自身旋转):
p 先绕x轴旋转,再绕y轴旋转,最后绕z轴旋转,那么总的旋
转矩阵为这三个旋转矩阵的乘积(按照旋转的顺序从右到左
相乘):
R = R z R y R x R=R_z R_y R_x R=RzRyRx

一个角度为90°时,丧失一个自由度

Special Euclidean Group SE(3)


经典方法回顾-运动学
DH参数法
- 对机器人的每个关节做frame assignment
Z轴一般是旋转轴,x轴是两个旋转轴的common normal
• 定义相关assignment的规则和约定 - 注意DH的变种,classic DH 和Model DH
DH参数



DH参数案例
Franka: 使用Craig convention (modifued DH)

这里需要按照下面这个参数定义来:

note Z_i ->Z_{i+1} 旋转,逆时针为正,右手定则。

https://frankaemika.github.io/docs/control_parameters.html
李群和李代数基础
a group that is also a differentiable manifold, such that group multiplication and taking inverses are both differentiable. p SO(3) SE(3)都满足李群的性质要求
b 李代数: SE(3)李群对应的李代数se(3)
POE(指数积)-正运动学介绍
• 螺旋运动:通过螺旋轴和转角表达
• T的计算
• 机器人正运动学可以用指数乘法表示

Differential Kinematics
- 对于一个具有 n个关节的机器人,其 Jacobian 矩阵 J是一个 6*n 的矩阵(对于一般的三维空间操作,考虑位置和姿态的六维向量),其中每一列对应一个关节,矩阵的元素表示末端执行器在基坐标系下的线速度和角速度与关节速度的关系。
• Measures the relationship of “velocity”
• 可以通过解析法或者数值法求Jacobian

逆运动学
雅可比矩阵和IK位置求解方法
-
注意Jacobian求逆的数值方法:LM,SVD,QP等
-
注意local minimum的处理方法
Line search -
LM方法其Jacobian逆
参考link
伪代码

规划
框架

空间:
• 构型空间 Configuration space
• 笛卡尔空间
• C-space到笛卡尔的映射相对容易
路径规划-高维空间
• 基于采样的方法: RRT, PRM
• 基于优化的方法
• 后处理
• 碰撞检测
轨迹生成&规划&优化介绍
基于sampling based方法生成的path往往需要后处理平滑 C-space(joint space)需要做速度规划,往往通过cubic spline等方法来实现,保证联系且满足一定的边界约束再进行C-space和Cartesian space的变换,同时优化和碰撞检测需要处理


控制
从笛卡尔空间到关节控制
• 关节模组控制
• 力控
末端力控
关节力

机器人传感器和视觉介绍



视觉感知任务


机器人学习方法介绍
通过学习的方法来解决机器人问题,特别是规划和控制问题
p 常见学习任务
• 运动学和规划器:
• 机器人运动学学习:学习机器人FK和IK模型,输出一般为关节角
• 通用规划学习-sampling-based planning:输出一般为采样点
• 任务学习
• 静态场景-抓取:输出一般为抓取位姿
• 操作学习&policy学习(例如叠衣服):输出一般为action
• 通用场景学习(语言指令+长时序任务):输出action,(中间一般有planning)
监督学习方法
抓取位姿学习&数据集
• 二指&平行夹爪-Planar抓取:
ü Cornell
ü Jacquard
• 二指&平行夹爪- 6DoF抓取:
ü Graspnet
ü Grasp anything
• 灵巧手抓取:
ü DexYCB

强化学习
p 强化学习一般定义为MDP和POMDP问题,通过 s, t, a, r 来定
义状态转移和奖励函数
p 相比于监督学习,一般不需要数据集,通过探索来得到数据
p 可以通过reward来定义长期奖励,intuitively比较适合规划任务
p 可以通过policy iteration来迭代,上限更高
p 对数据采集要求量大,对仿真要求高,相对不容易训练,且训
练成本较高
p 需要Gym env 和 仿真环境
p 需要处理sim-to-real问题
大模型
长时序复杂任务往往比较挑战
• 例如下图的gearbox组装任务,步骤繁多,且有出错的可能;
• 任务可能较为多样化,基于规则的方法相对难以调整,以及难以和人自然交互

两种范式(非定义)
• VLA端到端模型介绍
Vision-Language-Action
• VLM&LLM + Control Policy 分层模型
Task planner + control action • 两者之间的界限不严格

机器人VLA模型-端到端方法
• 静态场景
• 任务多样化,且描述方式多样化
• 语言到动作有gap
• 有一点的交互和澄清的需求

自动驾驶-端到端方法
• 通过一个纯视觉(UniAD)或者融合(FusionAD)的BEV模型来完成端到端的多任务(感知、地图、预测、决策和规划)自动驾驶模型
• 输出是规划轨迹(5秒左右)
• 任务理解容易,e.g. a点到b点;或者根据routing行驶
• 但是场景和行为多样化;决策交互和感知有挑战;动
态场景
大模型分层框架
分层规划方案VLM&LLM + Control Policy
• 大模型做任务拆解和规划
• 相关动作模型(control policy, visuomotor policy)输出轨迹
• 传统算法优化轨迹

LLM&VLM for planning
• 通过prompt来做任务规划
• 输入描述和能力,生成伪代码,代码,或者任务序列
• 最上层任务规划和人机交流,低频

https://github.com/microsoft/PromptCraft-Robotics/blob/main/examples/manipulation/pick_stack_msft_logo.md
实践工具
研发流程

特点:团队小,功能多,交互业务多
版本发布后问题需要优化,可以补充到产品需求设计中
- 机器人产品这里更多指自主或生活场景里通用&半通用机器人产品,非经典的机器人自动化产品

ROS
p 机器人中间件:ROS&ROS2
p 可视化工具和插件
p 核心算法和工程包:ROS Control,Navigation,Moveit
p 消息通讯和序列化
p 自动驾驶中间件Cyber

常用控制包
ROS2 control使用非常重要,一般基于这个框架进行开发。
硬件组件参考
调试指南

ROS2 moveit则可以参考实现。
仿真
用于自测
- 仿真引擎
- V-rep(CoppeliaSim )
- MuJoCo
- Bullet
- 仿真环境
- Isaac sim
- RLbench
- Gazebo

CoppeliaSim (PyRep)仿真图像和代码
• 代码示例和动画
• RLBench基于PyRep,有相关数据集和标准任务


Docker:部署和研发标准化方案
• Image and container
• Docker build 构建image
• Docker run 运行container
• Docker exec 进入正在运行的container
调试:logging, GDB&PDB, ros2 log
性能分析perf, profile
Git:熟练使用
调试:logging
• Logging是自测和运营问题的重要排查手段,
• 自动化log分析也是生产环境提效的手段
• 好的log习惯很重要
调试:GDB&PDB
• GDB用于断点,core dump排查等
• 其它静态分析,单测,内存分析等相关工具也需要有
所了解
性能分析perf, profile
• 生产环境中,算法工程师需要和软件,系统积极
配合准备相关的排查链路和需求
Git
• 有比较好的git使用习惯,commit习惯
• 熟悉常见操作,特别是分支合并操作
https://docs.ros.org/en/humble/Tutorials/Demos/Logging-and-logger-configuration.html
• 熟悉团队的MR&PR提交规则
推荐MIT课程,B站上可以搜计算机缺失的一课
p 业界研发流程:需求-技术评审-开发-自测-提测
ref
https://www.shenlanxueyuan.com/course/727/task/29238/show
相关文章:
1.机器人抓取与操作介绍-深蓝学院
介绍 操作任务 操作 • Insertion • Pushing and sliding • 其它操作任务 抓取 • 两指(平行夹爪)抓取 • 灵巧手抓取 7轴 Franka 对应人的手臂 6轴 UR构型去掉一个自由度 课程大纲 Robotic Manipulation 操作 • Robotic manipulation refers…...

六,Linux基础环境搭建(CentOS7)- 安装HBase
Linux基础环境搭建(CentOS7)- 安装HBase 大家注意以下的环境搭建版本号,如果版本不匹配有可能出现问题! 一、HBase下载及安装 HBase是一个分布式的、面向列的开源数据库,该技术来源于 Fay Chang 所撰写的Google论文“…...

《计算机网络网络层:连接虚拟世界的关键桥梁》
一、网络层概述 网络层在计算机网络中占据着至关重要的地位,它作为连接不同网络的关键层次,起着承上启下的作用。网络层的主要任务是实现网络互连,将数据设法从源端经过若干个中间节点传送到目的端,为分组交换网上的不同主机提供通…...

【AIGC】2024-arXiv-CtrLoRA:一种可扩展且高效的可控图像生成框架
2024-arXiv-CtrLoRA: An Extensible and Efficient Framework for Controllable Image Generation CtrLoRA:一种可扩展且高效的可控图像生成框架摘要1. 引言相关工作3. 方法3.1 准备工作3.3 有效适应新条件3.4 条件嵌入网络的设计 4. 实验4.1 实验设置4.2 与现有方法…...

立仪光谱共焦在玻璃上奥秘与应用
在现代工业和科学研究中,玻璃因其透明、坚硬和易加工的特性被广泛应用于各个领域。然而,玻璃的厚度测量一直是困扰业界的一大难题。传统的千分尺或电容式传感器虽然在一定程度上能满足生产需求,但在精度、效率以及适用范围上存在明显的局限。…...
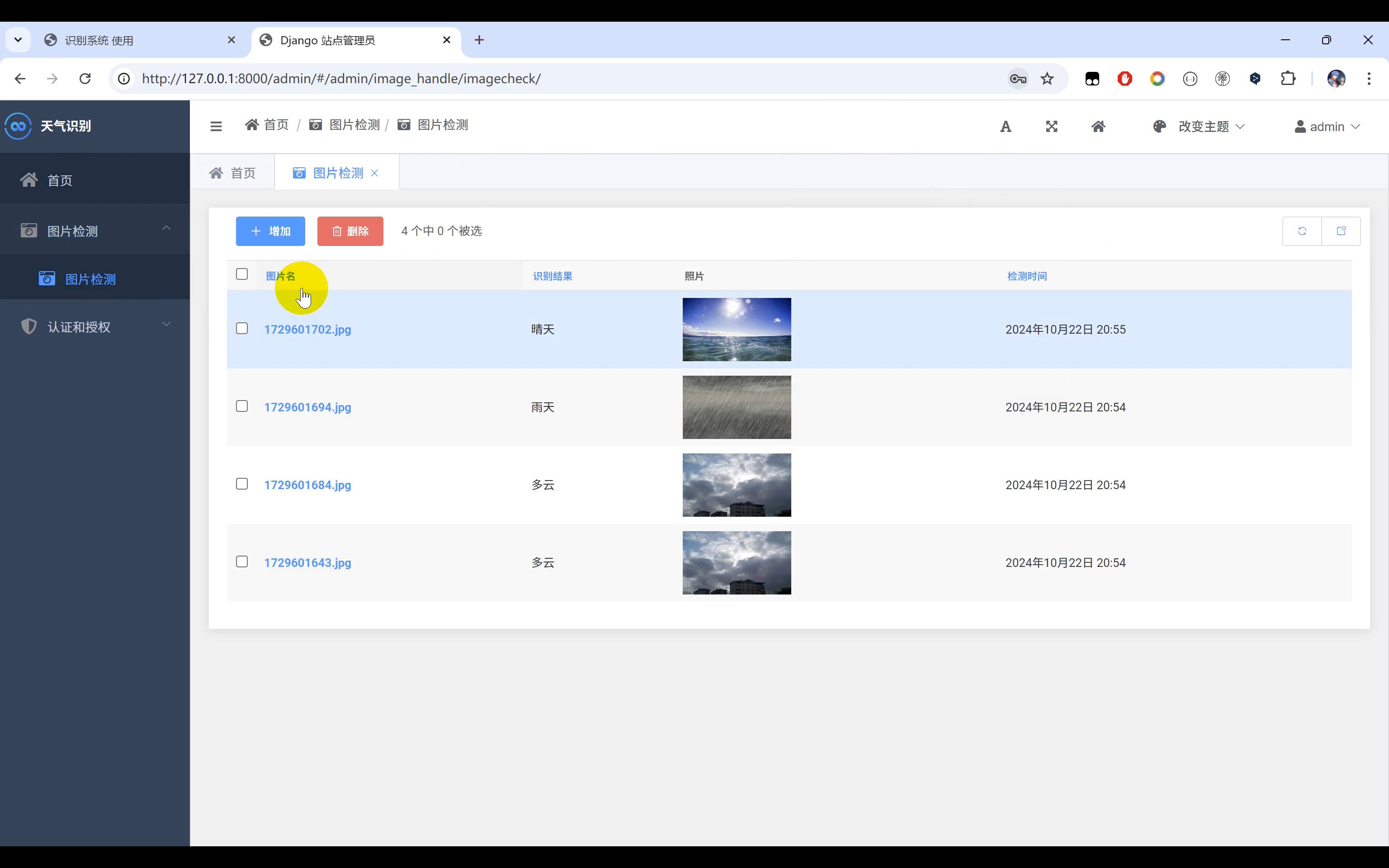
【天气识别系统】Python+卷积神经网络算法+人工智能+深度学习+TensorFlow+算法模型训练+Django网页界面
一、介绍 天气识别系统,以Python作为主要编程语言,通过收集了4种常见的天气图像数据集(多云、雨天、晴天、日出),然后基于TensorFlow搭建卷积神经网络算法模型,通过多轮迭代训练,最后得到一个识…...

MiniCTX:面向大语言模型定理证明的上下文相关基准测试系统
卡内基梅隆大学的研究人员推出MiniCTX,这是一个强大的基准测试系统,旨在通过整合前所未有的多重上下文元素(包括前提、先前证明、注释、符号以及导入和声明等结构组件)来彻底改变大型语言模型中定理证明能力的评估方式,…...

树莓派开发相关知识三PWM控制转速
基于树莓派PWM控制 控制L298N马达驱动转速 马达驱动转速 1、L298N电路图: 2、需要留意的有几点 INA~IND四个引脚分别控制OUTA-OUTD,即,INA高电平则OUTA有电。 ENA,ENB分别使能控制OUTA~OUTB以及OUTC~OUTD。 OUT口有VCC电压驱动…...

SpringBoot最常用的注解
1、RestController 作用:与Controller类似,但是RestController会自动将返回值转换为JSON格式。 2、RequestMapping 作用:用于映射请求URL和处理方法。 RequestMapping是Spring MVC框架中的一个核心注解,它用于映射HTTP请求和控…...

js 获取当前时间与前一个月时间
// 获取当前时间的毫秒数 var currentTimeMillis new Date().getTime();// 获取前一个月的Date对象 var dateLastMonth new Date(); dateLastMonth.setMonth(dateLastMonth.getMonth() - 1);// 获取前一个月的毫秒数 var timeMillisLastMonth dateLastMonth.getTime();conso…...
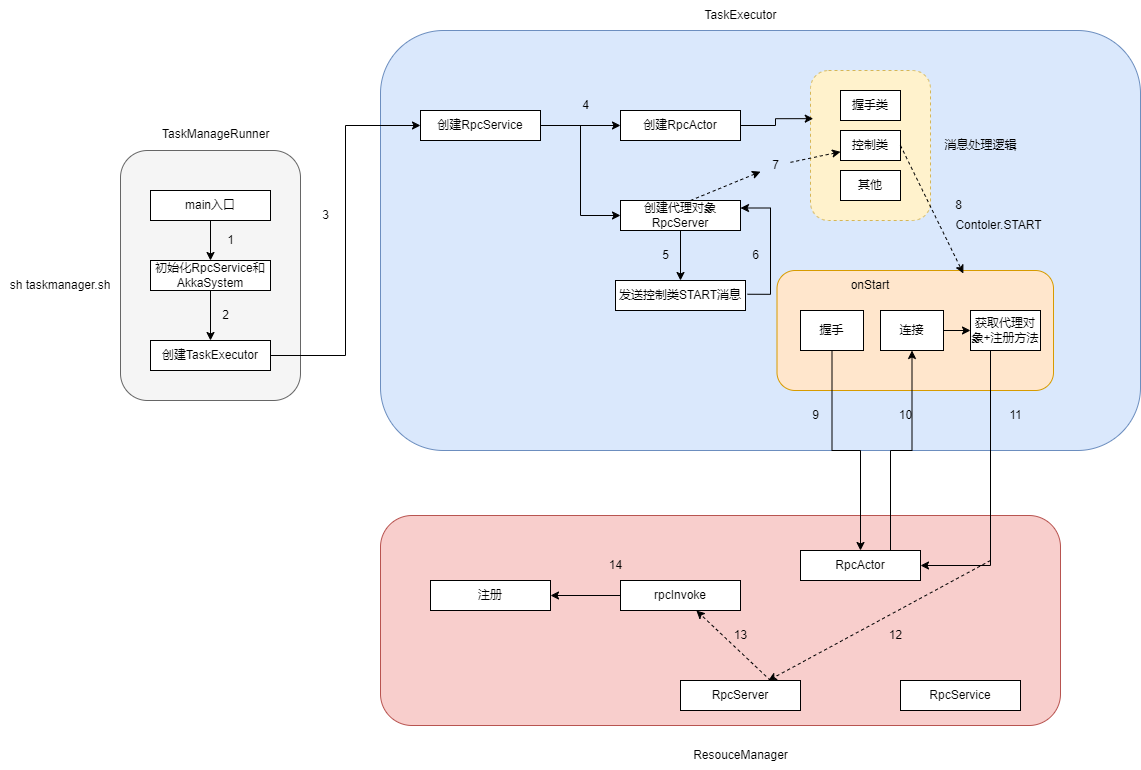
深度了解flink rpc机制(四) 组件启动流程源码分析
前言 目前已发布了3篇关于Flink RPC相关的文章,分别从底层通信系统akka/Pekko,RPC实现方式动态代理以及Flink RPC相关的组件做了介绍 深度了解flink rpc机制(一)-Akka/Pekko_flink pekko akka-CSDN博客 深度了解flink rpc机制&…...

C++基于opencv的视频质量检测--遮挡检测
文章目录 0.引言1. 原始代码分析1.1 存在的问题 2. 优化方案3. 优化后的代码4. 代码详细解读4.1. 输入检查4.2. 图像预处理4.3. 高斯模糊4.4. 梯度计算4.5. 计算梯度幅值和方向4.6. 边缘检测4.7. 计算边缘密度4.8. 估计遮挡程度4.9. 限定结果范围4.10. 返回结果 0.引言 视频质…...

手机玩潜水员戴夫?GameViewer远程如何随时随地玩潜水员戴夫教程
如果你是潜水员戴夫的忠实玩家,你知道如何在手机上玩潜水员戴夫吗?潜水员戴夫是一个以神秘蓝洞为背景的海洋冒险游戏。在这个游戏里你白天可以在美丽的大海里打鱼,晚上可以经营寿司店。现在这个游戏也能实现用手机随时随地畅玩了!…...

UE5 喷射背包
首选创建一个输入操作 然后在输入映射中添加,shift是向上飞,ctrl是向下飞 进入人物蓝图中编写逻辑,变量HaveJatpack默认true,Thrust为0 最后...

【Vue3】第三篇
Vue3学习第三篇 01. 组件组成02. 组件嵌套关系03. 组件注册方式04. 组件传递数据Props05. 组件传递多种数据类型06. 组件传递Props校验07. 组件事件08. 组件事件配合v-model使用09. 组件数据传递10. 透传Attributes 01. 组件组成 在vue当中,组件是最重要的知识&…...

c++二级指针
如果要通过函数改变一个指针的值,要往函数中传入指针的指针 如果要通过函数改变一个变量的值,那就要往函数中传入这个变量的地址 改变a的值和b的值 #include <iostream>using namespace std;void swap(int* a, int* b) {int temp *a;*a *b;*b …...

客户端存储 — IndexedDB 实现分页查询
前言 相信 IndexedDB 大家都有过了解,但是不一定每个人都有过实践,并且其中涉及到事务、游标等概念,会导致在初次使用时会有些不适应,那么本文会通过 IndexedDB 实现分页查询的形式进行实践,在开始之前,可…...

logback 如何将日志输出到文件
如何作 将日志输出到文件需要使用 RollingFileAppender,该 Appender 必须定义 rollingPolicy ,另外 rollingPollicy 下必须定义 fileNamePattern 和 encoder <appender name"fileAppender" class"ch.qos.logback.core.rolling.Rollin…...

Files.newBufferedReader和Files.readAllLines
在Java中,Files.newBufferedReader 和 Files.readAllLines 都是用于从文件中读取数据的工具方法,但它们的使用场景和功能有所不同。下面我将详细解释这两个方法的含义、用途、区别、优缺点以及各自的使用场景。 1. Files.newBufferedReader 含义和用途…...

MySQL 数据库备份与恢复全攻略
MySQL 数据库备份与恢复全攻略 引言 在现代应用中,数据库是核心组件之一。无论是个人项目还是企业级应用,数据的安全性和完整性都至关重要。为了防止数据丢失、损坏或意外删除,定期备份数据库是必不可少的。本文将详细介绍 MySQL 数据库的备…...

Encounter/Innovus GIFT TCL 脚本流程索引清单
目录 一、 布局阶段 (Placement) 二、 布线阶段 (Routing) 三、 时序阶段 (Timing) 四、 电源阶段 (Power) 五、 IO 与端口处理 六、 调试与辅助工具 一、 布局阶段 (Placement) 脚本名称 核心用途 调用场景 userAddAllHInsts.tcl 为源模块中的每个扇出添加缓冲器 解决高扇…...

技术生态依赖的实质与破局:从Android到自主可控的实践路径
1. 项目背景与核心议题解析最近在整理行业资料时,翻到一篇2013年的旧文,讨论的是当时中国工信部对国内移动产业过度依赖Android系统的担忧。虽然时过境迁,但文中提到的“技术自主可控”与“全球生态融入”之间的张力,在今天看来依…...
)
DeepSeek模型服务Kubernetes化迁移 checklist(含CRD定义、ServiceMesh适配、TLS双向认证配置)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek模型服务Kubernetes化迁移全景概览 将DeepSeek系列大语言模型(如DeepSeek-V2、DeepSeek-Coder)从单机或虚拟机部署迁移至Kubernetes集群,是支撑高并发推理、…...

詹姆斯·韦伯望远镜:344个单点故障背后的航天工程极限挑战
1. 韦伯望远镜的“生死十日”:一场价值百亿美元的太空芭蕾作为一名在航天与深空探测领域摸爬滚打了十几年的工程师,我经历过无数次地面测试的紧张,也见证过发射倒计时的屏息瞬间。但像詹姆斯韦伯空间望远镜(JWST)这样&…...

本地AI任务编排工具AgentForge:从看板管理到多代理协作
1. 项目概述:一个能调度AI编码代理的本地看板工具如果你和我一样,日常开发中经常需要让Claude Code这类AI编码助手去执行一些重复性的代码审查、重构或者生成任务,并且希望这些任务能像CI/CD流水线一样被编排、调度和监控,那么你一…...

为AI智能体构建可编程邮箱:mailbot实战指南
1. 项目概述:为AI智能体打造专属的“可编程邮箱”如果你正在开发一个AI智能体,无论是客服机器人、自动化工作流还是个人助理,让它具备收发邮件的能力往往是刚需。传统的做法是什么?要么去折腾Gmail的API,忍受OAuth授权…...

AgenticROS:用自然语言操控ROS2机器人的AI Agent接口实践
1. 项目概述:当AI大模型遇见机器人操作系统如果你和我一样,既对AI大模型的能力着迷,又对机器人开发充满兴趣,那么你肯定想过一个问题:能不能让Claude、Gemini这样的AI,像我们人类工程师一样,直接…...

开发AI智能体时利用Taotoken统一调度多模型提升任务完成率
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 开发AI智能体时利用Taotoken统一调度多模型提升任务完成率 在构建需要处理复杂、多模态任务的AI智能体时,单一模型的能…...

混元图像3.0对话P图技术解析:本地化可控生成新范式
1. 项目概述:这不是又一个“AI修图”功能,而是本地化P图工作流的临界点“腾讯混元图像3.0图生图模型上线,元宝也支持对话P图啦!”——这句话在科技圈刷屏那天,我正用本地部署的Stable Diffusion给客户改第十版电商主图…...
图神经网络与图Transformer在计算机视觉中的原理、应用与实战
1. 引言:当视觉任务遇上“关系”思维在计算机视觉领域,我们早已习惯了卷积神经网络(CNN)的统治地位。从ImageNet的图像分类,到Mask R-CNN的实例分割,CNN凭借其强大的局部特征提取能力,在像素网格…...