无人机避障——使用三维PCD点云生成的2D栅格地图PGM做路径规划
着重介绍通过对三维 PCD 点云进行处理生成 2D 栅格地图 PGM,而后将该 PGM 地图充分运用到无人系统路径规划之中,使得无人机能够依据此规划合理避开飞行路线上可能出现的障碍物。(解决如何使用PGM的问题)
Hybrid A*算法
参考博客:
Hybrid A*——ROS实现带有车辆运动学约束的路径规划算法_ros hybrid a*-CSDN博客
GitHub - zm0612/Hybrid_A_Star: Hybrid A Star algorithm C++ implementation
nvidia@Xavier-NX:~$ mkdir -p ~/hy_astar/src
nvidia@Xavier-NX:~$ cd hy_astar/
nvidia@Xavier-NX:~/hy_astar$ cd src/
nvidia@Xavier-NX:~/hy_astar/src$ catkin_init_workspace
Creating symlink "/home/nvidia/hy_astar/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
nvidia@Xavier-NX:~/hy_astar/src$ git clone https://github.com/zm0612/Hybrid_A_Star.git
正克隆到 'Hybrid_A_Star'...如果下载不了就多下载几次
都是网络问题!

里面存在了一些pgm文件和png文件,将自己的.pgm文件和.yaml拷贝在这个文件夹里面:
然后进行编译:
nvidia@Xavier-NX:~/hy_astar$ catkin_make
运行launch文件
source devel/setup.bash
roslaunch hybrid_a_star run_hybrid_a_star.launch如果运行报错,可能是yaml文件没有设置初始姿态:

修改yaml里面的部分值即可:
image: map.pgm
resolution: 0.5 # 按着自己的栅格地图的分辨率进行改
# 初始姿态需要是这个值,如果你的yaml文件不是,改为这个值
origin: [ 0.0, 0.0, 0.0 ]
# 下面就用这个里面的参数,也可以试一下自己的yaml参数
occupied_thresh: 0.1
free_thresh: 0.05
negate: 0结果:
用github里自带的栅格地图进行规划:

 用自己的点云导出的栅格地图进行规划,也能成功 :
用自己的点云导出的栅格地图进行规划,也能成功 :
点云生成栅格地图可以看我的上一篇文章:
无人机避障——4D毫米波雷达从PCD点云到二维栅格地图-CSDN博客
测试成功!
无人机跟无人车只是模型不一样,道理一样。
接下来就是将代码如何读取pgm文件并将其建立无人机能够识别障碍这块代码进行详细的分析 !!!。
相关文章:

无人机避障——使用三维PCD点云生成的2D栅格地图PGM做路径规划
着重介绍通过对三维 PCD 点云进行处理生成 2D 栅格地图 PGM,而后将该 PGM 地图充分运用到无人系统路径规划之中,使得无人机能够依据此规划合理避开飞行路线上可能出现的障碍物。(解决如何使用PGM的问题) Hybrid A*算法 参考博客…...

supermall项目上拉加载bug分析
1.bug分析 bug出现的过程是这样的:better-scroll框架会计算滚动内容的高度(通过BScroll对象的scrollerHeight属性记录滚动内容的高度) 由于内容中的图片资源还未加载成功 就已经完成计算 导致计算结果错误 而计算之后 图片资源随之加载完成 这时候better-scroll框架…...

【linux网络编程】| socket套接字 | 实现UDP协议聊天室
前言:本节内容将带友友们实现一个UDP协议的聊天室。 主要原理是客户端发送数据给服务端。 服务端将数据再转发给所有链接服务端的客户端。 所以, 我们主要就是要实现客户端以及服务端的逻辑代码。 那么, 接下来开始我们的学习吧。 ps:本节内容…...

第二届开放原子大赛-开源工业软件算法集成大赛即将启动!
第二届开放原子大赛-开源工业软件算法集成大赛作为开放原子开源基金会组织举办的开源技术领域专业赛事,聚焦开源底座框架平台建设,通过组件化集成的开发模式,丰富平台功能模块,拓展其应用场景,以此促进工业软件生态的繁…...
)
PXC集群(Percona XtraDB Cluster )
一、简介 基于Galera Cluster技术的开源分布式数据库解决方案,它允许你在多个MySQL服务器之间创建一个同步的多主复制集群。 特点: * 多主复制架构: PXC集群支持多主复制,每个节点都可以同时读写数据,这使得应用程序可以更灵活地进行负载均衡和高可用性设置。* 同步复制:…...

分布式光伏是什么意思?如何高效管理?
分布式光伏系统是指在用户现场或靠近用电现场配置较小的光伏发电供电系统,以满足特定用户的需求。根据通知,分布式光伏系统主要有以下几类定义: 10kV以下电压等级接入,且单个并网点总装机容量不超过6MW的分布式电源:这…...

提问GPT
1 理解GPT AI模型即采用深度学习技术的人工神经网络。 你不会被AI取代,而是会被熟练运用AI的人取代 1.1 问答或对话是普通用户与这一轮新AI产品的典型交互方式。 GPT生成式预训练转换器 了解当前GPT产品的形式: 通用聊天机器人…...

李飞飞团队新突破:低成本高泛化机器人训练法,零样本迁移成功率90%!
在机器人训练中,如何高效地利用模拟环境一直是研究者们关注的重点问题。 近日,美国斯坦福大学李飞飞教授团队提出了一种突破性的“数字表亲”(digital cousins)概念。这一创新方法既保留了数字孪生的优势,又大大降低了…...

PHP内存马:不死马
内存马概念 内存马是无文件攻击的一种常用手段,利用中间件的进程执行某些恶意代码。首先要讲的是PHP不死马,实质上就是直接用代码弄一个死循环,强占一个 PHP 进程,并不间断的写一个PHP shell,或者执行一段代码。 不死…...

【python】OpenCV—Connected Components
文章目录 1、任务描述2、代码实现3、完整代码4、结果展示5、涉及到的库函数6、参考 1、任务描述 基于 python opencv 的连通分量标记和分析函数,分割车牌中的数字、号码、分隔符 cv2.connectedComponentscv2.connectedComponentsWithStatscv2.connectedComponents…...

【优选算法篇】前缀之序,后缀之章:于数列深处邂逅算法的光与影
文章目录 C 前缀和详解:基础题解与思维分析前言第一章:前缀和基础应用1.1 一维前缀和模板题解法(前缀和)图解分析C代码实现易错点提示代码解读题目解析总结 1.2 二维前缀和模板题解法(二维前缀和)图解分析C…...

win10 更新npm 和 node
win10 更新npm 和 node win10 更新 npm winR 输入cmd,打开命令行,并输入如下 # 查看当前npm版本 npm -v # 清缓存 npm cache clean --force # 强制更新npm,试过npm update -g,没起作用,版本没变化 npm install -g …...

搜索引擎算法更新对网站优化的影响与应对策略
内容概要 随着互联网的不断发展,搜索引擎算法也在不断地进行更新和优化。了解这些算法更新的背景与意义,对于网站管理者和优化人员而言,具有重要的指导意义。不仅因为算法更新可能影响到网站的排名,还因为这些变化也可能为网站带…...
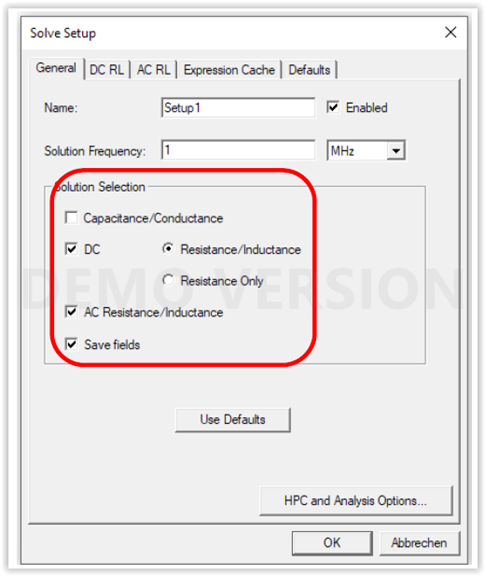
使用 Q3D 计算芯片引线的 AC 和 DC R 和 L
摘要: 模具经常用于电子行业。了解其导联的寄生特性对于设计人员来说很重要。Q3D 是计算 RLCG 的完美工具。它可用于高速板或低频电力电子设备。 在下面的视频中,我们展示了如何修改几何结构、设置模型和检查结果。 详细信息: 几何图形可以在 Q3D 中创建,也可以作为不同…...

前端_008_Vite
文章目录 Vite项目结构依赖构建插件 官网:https://vitejs.cn/vite3-cn/guide/ 一句话简介:前端的一个构建工具 Vite项目结构 index.html package.json vite.config.js public目录 src目录 #新建一个vite项目 npm create vitelatest原有项目引入vite需要…...

ssm007亚盛汽车配件销售业绩管理统(论文+源码)_kaic
本科毕业设计论文 题目:亚盛汽车配件销售业绩管理系统设计与实现 系 别: XX系(全称) 专 业: 软件工程 班 级: 软件工程15201 学生姓名: 学生学号: 指导教师&am…...

如何使用python完成时间序列的数据分析?
引言 时间序列分析是统计学和数据分析中的一个重要领域,广泛应用于经济学、金融、气象学、工程等多个领域。 时间序列数据是按时间顺序排列的一系列数据点,通常用于分析数据随时间的变化趋势。 本文将介绍时间序列分析的基本概念、常用方法以及如何使用Python进行时间序列…...
)
数字ic设计,Windows/Linux系统,其他相关领域,软件安装包(matlab、vivado、modelsim。。。)
目录 一、总述 二、软件列表 1、modelsim_10.6c 2、notepad 3、matlab 4、Visio-Pro-2016 5、Vivado2018 6、VMware15 7、EndNote X9.3.1 8、Quartus 9、pycharm 10、CentOS7-64bit 一、总述 过往发了很多数字ic设计领域相关的内容,反响也很好。 最近…...

SD-WAN分布式组网:构建高效、灵活的企业网络架构
随着企业数字化转型的深入,分布式组网逐渐成为企业网络架构中的核心需求。无论是跨区域的分支机构互联,还是企业与云服务的连接,如何在不同区域实现高效、低延迟的网络传输,已成为业务成功的关键。SD-WAN(软件定义广域…...

Task :prepareKotlinBuildScriptModel UP-TO-DATE,编译卡在这里不动或报错
这里写自定义目录标题 原因方案其他思路 原因 一般来说,当编译到这个task之后,后续是要进行一些资源的下载的,如果你卡在这边不动的话,很有可能就是你的IDE目前没有办法进行下载。 方案 开关一下IDE内部的代理,或者…...

金仓数据库KingbaseES自动创建表空间目录:简化运维,适配国产生态
目录 一、前言:传统表空间创建的运维痛点 二、自动创建表空间目录核心方案 2.1 核心控制参数 2.2 功能强制约束条件 2.3 多场景实操测试(含大小写混合路径) 场景1:目标目录已存在 场景2:目标目录部分存在 场景…...

昇腾CANN ops-blas 仓:GEMM 算子的高性能实现
前言 矩阵乘法是深度学习里最核心的操作,没有之一。Transformer 的 Attention 要做 QK.T 和 PV,FFN 要做两 个 MatMul。GEMM(General Matrix Multiply)就是专门优化矩阵乘的算子。ops-blas 仓是 CANN 的线性代数基础算子库&#x…...

ARGUS:视觉中心化多模态推理框架,实现像素级可验证Chain-of-Thought
1. 项目概述:这不是又一个“多模态大模型”,而是一次视觉推理范式的重新校准ARGUS这个名字,乍看像某个军事侦察系统代号,其实它精准指向了当前多模态AI领域最棘手的痛点——视觉信息在推理链中长期处于“失语”状态。你肯定见过这…...

Triton+Istio+Prometheus构建高可用ML模型服务化架构
1. 项目概述:这不是一次“部署”,而是一场从实验室到产线的系统性迁移“From Notebook to Production: Running ML in the Real World (Part 4)”——这个标题里藏着太多被轻描淡写却重若千钧的词。“Notebook”不是指纸质本子,而是Jupyter里…...

API 的分布式世界 vs COM 的语言桥梁:典型应用场景深度解析
典型应用场景:API:构建现代分布式系统,如微服务、Web应用、移动后端、IoT设备通信;COM:使不同语言编写的软件组件(如C组件被C#、Python调用)在Windows上协同工作。对 API 和 COM 的典型应用场景…...

stm32f4 + Helix + Max98357播放mp3文件
stm32f4的SDIO + FataFs读取SD卡文件在前面的文章中已经实现,下面的配置和修改基于之前的配置实现 配置I2S 模式设置 参数设置 DMA配置 勾选 SPI2 global interrupt 以上都配置完Helix 解码出来的 PCM 数据就发给 MAX98357了 Helix解码库移植...
:1套配置+4个插件=自动注入用户喜爱度)
Vue/React/Svelte通用Lovable实践框架(内部首发):1套配置+4个插件=自动注入用户喜爱度
更多请点击: https://kaifayun.com 第一章:Vue/React/Svelte通用Lovable实践框架(内部首发):1套配置4个插件自动注入用户喜爱度 Lovable 是一套面向用户体验(UX)可量化提升的前端工程化实践框架…...

淘宝淘金币自动化终极指南:如何用5分钟完成30分钟日常任务
淘宝淘金币自动化终极指南:如何用5分钟完成30分钟日常任务 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojinbi …...

JMeter分布式压测原理与高可用集群搭建实战
1. 为什么单台JMeter跑不出真实流量——分布式压测不是“加机器”那么简单 你有没有试过用Jmeter对一个新上线的订单服务做压测,本地配了200个线程,结果TPS卡在80就上不去了,CPU才用了35%,网络IO几乎为零?我第一次遇到…...

DeepSeek多集群联邦治理难题破局:用GitOps+ArgoCD+自定义CRD实现跨AZ/AWS/GCP统一管控——现在不看,下季度升级将强制启用
更多请点击: https://kaifayun.com 第一章:DeepSeek云原生架构设计 DeepSeek云原生架构以Kubernetes为核心调度平台,深度融合服务网格(Istio)、可观测性栈(Prometheus Grafana Loki)与GitOps…...