3个模型的交互式多模型IMM,基于EKF的目标跟踪实例(附MATLAB代码)

文章目录
- 3个模型的IMM
- 源代码
- 运行结果
- 代码介绍
- 总结
3个模型的IMM
代码实现了基于 I M M IMM IMM(Interacting Multiple Model)算法的目标跟踪。它使用三种不同的运动模型(匀速直线运动、左转弯和右转弯)来预测目标的位置,并通过卡尔曼滤波进行状态估计。
源代码
只有一个m文件,部分如下:
% 基于IMM算法的目标跟踪,三模型IMM
% 2024-09-21/Ver1
clc; clear; close all; % 清除命令窗口、工作空间和关闭所有图形窗口
rng('default'); rng(0); % 设置随机数生成器的默认状态,以确保可重复性%% 仿真参数设置
time = 100; % 仿真迭代次数
T = 1; % 采样间隔(时间步长)
w2 = 3 * 2 * pi / 360; % 模型2的转弯率(3度)
w3 = -3 * 2 * pi / 360; % 模型3的转弯率(-3度)
H = [1, 0, 0, 0; % 模型量测矩阵0, 0, 1, 0];
G = [T^2 / 2, 0; % 模型过程噪声加权矩阵T, 0;0, T^2 / 2;0, T];
R = 10 * diag([1, 1]); % 模型量测噪声协方差矩阵
Q = 0.1 * diag([1, 1]); % 模型过程噪声协方差矩阵
F1 = [1, T, 0, 0; % 模型1状态转移矩阵(匀速直线运动)0, 1, 0, 0;0, 0, 1, T;0, 0, 0, 1];
% 完整代码:https://gf.bilibili.com/item/detail/1106540012运行结果
运行结果如下:
- 目标的运动轨迹:

速度误差和位置误差:

多模型的概率(左图是画在同一幅图上的,右图是画在不同的子图上的):

代码介绍
-
代码概述
这段代码实现了基于 IMM(Interacting Multiple Model)算法的目标跟踪。它使用三种不同的运动模型(匀速直线运动、左转弯和右转弯)来预测目标的位置,并通过卡尔曼滤波进行状态估计。 -
初始化部分
clc; clear; close all; % 清除命令窗口、工作空间和关闭所有图形窗口
rng('default'); rng(0); % 设置随机数生成器的默认状态,以确保可重复性
这部分代码清理 MATLAB 环境并设置随机数种子,确保每次运行程序的结果一致。
- 仿真参数设置
time = 1000; % 仿真迭代次数
T = 1; % 采样间隔(时间步长)
w2 = 3 * 2 * pi / 360; % 模型2的转弯率(3度)
w3 = -3 * 2 * pi / 360; % 模型3的转弯率(-3度)
这里定义了仿真所需的参数,包括时间步长和转弯率。H、G、R 和 Q 分别是量测矩阵、过程噪声加权矩阵、量测噪声协方差矩阵和过程噪声协方差矩阵。
- 状态转移矩阵定义
F1 = [...]; % 匀速直线运动
F2 = [...]; % 左转弯
F3 = [...]; % 右转弯
这部分定义了三种不同运动模型的状态转移矩阵,描述了如何从当前状态预测下一个状态。
- 生成量测数据
x = zeros(4, time); % 状态数据矩阵
z = zeros(2, time); % 含噪声量测数据
初始化状态和量测数据矩阵,并生成真实状态和含噪声的量测数据。通过循环,按照设定的时间段使用不同的运动模型更新目标状态。
- IMM 算法迭代
% 初始化
X_IMM = zeros(4, time); % IMM算法模型综合状态估计值
P_IMM = zeros(4, 4, time); % IMM算法模型综合状态协方差矩阵
这部分代码初始化 IMM 算法的状态估计值和协方差矩阵,设置初始状态和模型转移概率矩阵。
- 迭代过程
for t = 1:time - 1% 第一部分 Interacting(只针对IMM算法)c_j = pij' * u_IMM(:, t); % 计算混合概率的归一化因子...% 第二步 -- 卡尔曼滤波[x_CV, P_CV, r_CV, S_CV] = Kalman(...);...% 第三步 -- 模型概率更新[u_IMM(:, t + 1)] = Model_P_up(...);...% 第四步 -- 模型综合[X_IMM(:, t + 1), P_IMM(:, :, t + 1)] = Model_mix(...);
end
在这个迭代过程中,程序首先计算当前模型的混合概率,然后使用卡尔曼滤波器对每个模型的状态进行估计。接着更新模型的概率,并综合各模型的状态和协方差。
- 绘图部分
figure;
plot(z_true(1, :), z_true(2, :), 'DisplayName', '真实值');
...
title('目标运动轨迹'); % 图表标题
xlabel('x/m'); ylabel('y/m'); % 坐标轴标签
legend; % 添加图例
最后,程序生成多幅图表,展示目标运动轨迹、位置误差、速度误差以及模型概率的变化。这些图表帮助分析模型的跟踪性能。
- 函数定义
程序中还定义了几个函数,例如 K a l m a n 、 M o d e l m i x Kalman、Model_mix Kalman、Modelmix 和 KaTeX parse error: Double subscript at position 8: Model_P_̲up,用于执行卡尔曼滤波、模型综合和模型概率更新。这些函数模块化了代码,使其更易于理解和维护。
总结
本文展示了如何使用 IMM 算法结合卡尔曼滤波实现目标跟踪。通过不同的运动模型和状态估计,能够有效地预测目标的运动轨迹,并提供相应的误差分析。
相关文章:
3个模型的交互式多模型IMM,基于EKF的目标跟踪实例(附MATLAB代码)
文章目录 3个模型的IMM源代码运行结果代码介绍总结 3个模型的IMM 代码实现了基于 I M M IMM IMM(Interacting Multiple Model)算法的目标跟踪。它使用三种不同的运动模型(匀速直线运动、左转弯和右转弯)来预测目标的位置&#x…...

利用游戏引擎的优势
大家好,我是小蜗牛。 在当今快速发展的游戏产业中,选择合适的游戏引擎对开发者来说至关重要。Cocos Creator作为一款功能强大且灵活的游戏引擎,为开发者提供了丰富的工具和资源,使他们能够高效地开发出优秀的游戏。本文将探讨如何…...

一致角色的视频且唇形同步中文配音和免费音效添加
现在AI可以免费生成不带水印、不限时长的视频了,并且视频里的角色可以进行唇形同步配音。最重要的是,我还会分享给大家,怎么生成角色一致的动画场景,怎么使用场景图片生成完整的视频,并且我还会介绍一款,我…...

Spring学习笔记_14——@Qualifier
Qualifier 1. 解释 当Spring中存在多个类型相同但是名称不同的Bean时,使用Autowired注解向类的构造方法、方法、参数、字段中注入Bean对象时,首先会根据Bean的类型注入,如果存在多个类型相同的Bean时,会根据Bean的名称注入&…...

高级SQL技巧详解与实例
在数据处理与分析领域,高级SQL技巧是提升效率与准确性的关键。本文将结合参考资料,对高级SQL技巧进行系统的整理与解读,并通过实例展示其应用。 一、窗口函数 窗口函数是一种在SQL中执行复杂计算的强大工具,它们允许用户在一组行…...

实现PC端和安卓手机的局域网内文件共享
文章目录 一、准备工作1.1 笔记本(Win10)的设置(主要可分为3大部分:更改共享设置、创建本地用户、选择共享文件)1.2 台式机(Win7)的设置 二、实现共享文件夹的访问2.1 笔记本(Win10)访问台式机(Win7)2.2 台式机(Win7)访问笔记本(Win10)(一定要…...

腾讯云云开发深度解读:云数据库、云模板与AI生成引用的魅力
腾讯云云开发平台为开发者和潜在用户提供了丰富的解决方案,其中的云数据库、云模板和AI生成引用等产品尤为引人注目。这篇文件是我个人对这些产品的能力、应用场景、业务价值、技术原理的介绍和深度解读,最后也简单写一下新手如何进行相关产品的初步使用…...

预览 PDF 文档
引言 在现代Web应用中,文件预览功能是非常常见的需求之一。特别是在企业级应用中,用户经常需要查看各种类型的文件,如 PDF、Word、Excel 等。本文将详细介绍如何在Vue项目中实现 PDF 文档的预览功能。 实现原理 后端API 后端需要提供一个…...

Chromium 在WebContents中添加自定义数据c++
为了能在WebContents中添加自定义数据先看下几个关键类的介绍。 一、WebContents 介绍: WebContents是content模块核心,是呈现 Web 内容(通常为 HTML)位于矩形区域中。 最直观的是一个浏览器标签对应一个WebContents,…...
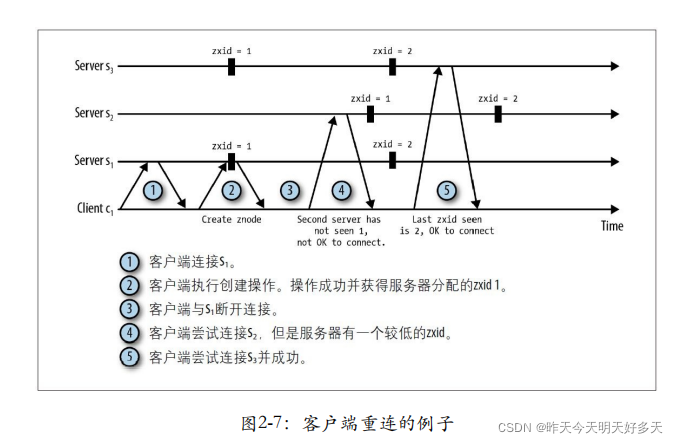
【Apache Zookeeper】
一、简介 1、场景 如何让⼀个应⽤中多个独⽴的程序协同⼯作是⼀件⾮常困难的事情。开发这样的应⽤,很容易让很多开发⼈员陷⼊如何使多个程序协同⼯作的逻辑中,最后导致没有时间更好地思考和实现他们⾃⼰的应⽤程序逻辑;又或者开发⼈员对协同…...

13.音乐管理系统(基于SpringBoot + Vue)
目录 1.系统的受众说明 2 需求分析 2.1用例图及用例分析 2.1.1 用户用例图及用例分析 2.1.2 管理员用例图及用例分析 2.2 系统结构图和流程图 2.2.1 音乐播放器的系统流程图(图2.2.1-1) 2.2.2 系统功能表(表2.2.2…...

如何从iconfont中获取字体图标并应用到微信小程序中去?
下面我们一一个微信小程序的登录界面的制作为例来说明,如何从iconfont中获取字体图标是如何应用到微信小程序中去的。首先我们看效果。 这里所有的图标,都是从iconfont中以字体的形式来加载的,也就是说,我们自始至终没有使用一张…...

C语言中的位操作
第一章 变量某位赋值与连续赋值 寄存器 | 值 //例如:a 1000 0011b a | (1<<2) //a 1000 0111 b 单独赋值 a | (3<<2*2) // 1011 0011b 连续赋值 第二章 变量某位清零与连续清零 寄存器 & ~() 值 //例子:a …...

Spring之HTTP客户端--RestTemplate的使用
原文网址:Spring之HTTP客户端--RestTemplate的使用_IT利刃出鞘的博客-CSDN博客 简介 本文介绍RestTemplate的用法。RestTemplate是Spring自带的HTTP客户端,推荐使用。 项目中经常需要使用http调用第三方的服务,常用的客户端如下࿱…...

vscode和pycharm在当前工作目录的不同|python获取当前文件目录和当前工作目录
问题背景 相信大家都遇到过一个问题:一个项目在vscode(或pycharm)明明可以正常运行,但当在pycharm(或vscode)中时,却经常会出现路径错误。起初,对于这个问题,我也是一知…...

速盾:海外高防CDN有哪些优势?
海外高防CDN(Content Delivery Network)是一种通过部署分布式节点服务器来加速网站内容分发的技术,它能够提供更快速、稳定、安全的网站访问体验。相比于传统的CDN服务,海外高防CDN具有以下几个优势: 全球分布…...

OpenCV视觉分析之目标跟踪(4)目标跟踪类TrackerDaSiamRPN的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 cv::TrackerDaSiamRPN 是 OpenCV 中用于目标跟踪的一个类,它实现了 DaSiam RPN(Deformable Siamese Region Proposal Net…...

自动对焦爬山算法原理
自动对焦爬山算法原理可以归纳为以下几个关键步骤: (1)初始化: 爬山算法从一个随机或预设的初始位置开始,这个位置代表了镜头的初始焦距。 (2)清晰度评价: 算法首先在当前焦距下捕…...

Hyperledger Fabric有那些核心技术,和其他区块链对比Hyperledger Fabric有那些优势
Hyperledger Fabric是一个模块化、权限化的企业级区块链平台,与比特币、以太坊等公有链相比,Fabric主要为私有链或联盟链设计,适用于企业应用。它包含多项核心技术,使其在企业级区块链应用中具有独特优势。以下是Fabric的核心技术…...

「Mac畅玩鸿蒙与硬件8」鸿蒙开发环境配置篇8 - 应用依赖与资源管理
本篇将介绍如何在 HarmonyOS 项目中高效管理资源文件和依赖,以确保代码结构清晰并提升应用性能。资源管理涉及图片、字符串、多语言文件等,通过优化文件加载和依赖管理,可以显著提升项目的加载速度和运行效率。 关键词 资源管理应用依赖优化…...

高通Android音频HAL揭秘:从AudioFlinger到libaudiohal.so的加载与设备打开流程
高通Android音频HAL深度解析:从框架设计到硬件交互的全链路实现 在Android系统的多媒体生态中,音频子系统扮演着至关重要的角色。作为连接应用层与物理硬件的桥梁,音频硬件抽象层(HAL)的设计直接决定了设备的音频性能…...

如何用本地AI技术实现视频硬字幕的高效提取:video-subtitle-extractor实战指南
如何用本地AI技术实现视频硬字幕的高效提取:video-subtitle-extractor实战指南 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包…...

“宏”的概念,什么是“宏”?
“宏”(Macro)本质上是一种批量处理的自动化机制,其核心概念是:将一系列频繁执行的操作、命令或代码片段预先录制或编写成一个“指令集”,通过一个简短的触发动作(如快捷键、按钮点击)来一次性调…...

Windows 一键部署 OpenClaw 教程|5 分钟搭建本地 AI 智能体,轻松搞定复杂配置
OpenClaw 2.7.1 接入阿里云百炼超详细图文教程 📋 前置准备 本地已安装并能正常运行 OpenClaw 2.7.1 WindowsOpenClaw 顶部 Gateway 保持在线状态拥有可正常登录的阿里云账号网络可正常访问阿里云百炼控制台: https://bailian.console.aliyun.com/cn-be…...
)
【光栅和蛇形误差扩散半色调】基于Floyd-Steinberg算法进行误差扩散半色调研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

开源任务恢复工具openclaw-task-recovery:轻量级断点续做解决方案
1. 项目概述:一个关于任务恢复的开源工具最近在整理自己的自动化脚本和任务调度系统时,遇到了一个老生常谈但又非常棘手的问题:任务中断后的恢复。无论是数据处理流水线、爬虫任务,还是长时间运行的批处理作业,网络抖动…...

Agent量产鸿沟:从数据拆解到厂商抢位,安全基建决定谁能上岸
一、数据全景——鸿沟到底在哪采纳率的数字迷宫2026年Q2,企业Agent落地数据密集发布,但数字彼此矛盾——有的报告称"78%企业有试点",有的则说"仅17%已部署"。这些差异不是数据错误,而是定义边界不同。理解这个…...

基于LLM与OpenClaw的智能自动化:构建自然语言驱动的桌面脚本生成器
1. 项目概述:连接两个世界的桥梁最近在折腾一个挺有意思的项目,叫hermes-openclaw-bridge。光看这个名字,可能有点摸不着头脑,但如果你同时关注过大型语言模型(LLM)和自动化脚本工具,大概就能猜…...

GeoJSON.io:3分钟创建专业地图,地理数据可视化从未如此简单
GeoJSON.io:3分钟创建专业地图,地理数据可视化从未如此简单 【免费下载链接】geojson.io A quick, simple tool for creating, viewing, and sharing spatial data 项目地址: https://gitcode.com/gh_mirrors/ge/geojson.io 你是否曾经需要在地图…...

PyTorch深度学习资源大全:如何快速找到最佳教程和项目库的终极指南
PyTorch深度学习资源大全:如何快速找到最佳教程和项目库的终极指南 【免费下载链接】the-incredible-pytorch The Incredible PyTorch: a curated list of tutorials, papers, projects, communities and more relating to PyTorch. 项目地址: https://gitcode.c…...