MoveIt 控制自己的真实机械臂【2】——编写 action server 端代码
完成了 MoveIt 这边 action client 的基本配置,MoveIt 理论上可以将规划好的 trajectory 以 action 的形式发布出来了,浅浅尝试一下,在 terminal 中运行 roslaunch xmate7_moveit_config_new demo.launch

报错提示他在等待 xmate_arm_controller/follow_joint_trajectory 这个 action sever 的到来,显然,他等的好辛苦,却还是没有等来所期待的人,最终遗憾地告诉大家,以 xmate_arm_controller/follow_joint_trajectory 为 action 名称的 action client 端没有被连接。
此时,rostopic list 一下:
hjs@hjs:~/new_xmate7pro_ws$ rostopic list
/attached_collision_object
/collision_object
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
/head_mount_kinect/depth_registered/points
/joint_states
/move_group/cancel
/move_group/display_contacts
/move_group/display_cost_sources
/move_group/display_grasp_markers
/move_group/display_planned_path
/move_group/feedback
/move_group/filtered_cloud
/move_group/goal
/move_group/monitored_planning_scene
/move_group/motion_plan_request
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/real_controller_joint_states
/recognized_object_array
/rosout
/rosout_agg
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_descriptions
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_updates
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full
/tf
/tf_static
/trajectory_execution_event
发现根本没有 xmate_arm_controller/follow_joint_trajectory 这个名称的 action 发布出来。
想想也能理解,MoveIt 端的 action client 苦苦等了好久的另一半(action server),action server 却终究没有出现和给出回应,那么action client自然也就,没有必要再将自己的爱意(xmate_arm_controller/follow_joint_trajectory) 表达出来了。
言归正传,之前在 Gazebo 中虚拟仿真的时候,是 Gazebo 的 ros_control 插件充当了 action server 的角色,让 MoveIt 端的 client 和 Gazebo 端的 server 建立了 action 通信连接;那么现在,针对真实机械臂,没有人再充当 action server 的角色了,自然也就没有 follow_joint_trajectory 发布出来,所以下一步要做的就是自己编写一个 Movet 端的 action client 所倾慕的 action server ,并为它们牵线(配置接口),介绍它们认识(建立连接),进而实现 follow_joint_trajectory 的发布和接收。
关于 ROS action 相关知识的学习自行补上,我编写的 action server 节点如下:
# include <ros/ros.h>
# include <actionlib/server/simple_action_server.h>
# include <control_msgs/FollowJointTrajectoryAction.h>
# include <std_msgs/Float32MultiArray.h>
# include <iostream>
# include <moveit_msgs/RobotTrajectory.h>using namespace std;
// 重命名类型为 Server
typedef actionlib::SimpleActionServer<control_msgs::FollowJointTrajectoryAction> Server;// 用于存储 moveit 发送出来的轨迹数据
moveit_msgs::RobotTrajectory moveit_tra;void execute_callback(const control_msgs::FollowJointTrajectoryGoalConstPtr& goalPtr, Server* moveit_server)
{// 1、解析提交的目标值int n_joints = goalPtr->trajectory.joint_names.size();int n_tra_Points = goalPtr->trajectory.points.size();moveit_tra.joint_trajectory.header.frame_id = goalPtr->trajectory.header.frame_id;moveit_tra.joint_trajectory.joint_names = goalPtr->trajectory.joint_names;moveit_tra.joint_trajectory.points.resize(n_tra_Points);for(int i=0; i<n_tra_Points; i++) // 遍历每组路点{moveit_tra.joint_trajectory.points[i].positions.resize(n_joints);moveit_tra.joint_trajectory.points[i].velocities.resize(n_joints);moveit_tra.joint_trajectory.points[i].accelerations.resize(n_joints);moveit_tra.joint_trajectory.points[i].time_from_start = goalPtr->trajectory.points[i].time_from_start;for(int j=0;j<n_joints; j++) // 遍历每组路点中的每个关节数据{moveit_tra.joint_trajectory.points[i].positions[j] = goalPtr->trajectory.points[i].positions[j];moveit_tra.joint_trajectory.points[i].velocities[j] = goalPtr->trajectory.points[i].velocities[j];moveit_tra.joint_trajectory.points[i].accelerations[j] = goalPtr->trajectory.points[i].accelerations[j];}}cout << "The trajectory data is:" << "********************************************" << endl;cout << moveit_tra;cout << "********************************************" << "The trajectory data is finished printing." << endl;ROS_INFO("The number of joints is %d.",n_joints);ROS_INFO("The waypoints number of the trajectory is %d.",n_tra_Points);ROS_INFO("Receive trajectory successfully");moveit_server->setSucceeded();
}int main(int argc, char *argv[])
{ros::init(argc,argv,"moveit_action_server");ros::NodeHandle nh;// 创建 action 对象(NodeHandle,话题名称,回调函数解析传入的目标值,服务器是否自启动)Server moveit_server(nh,"xmate_arm_controller/follow_joint_trajectory", boost::bind(&execute_callback, _1, &moveit_server), false);// 手动启动服务器moveit_server.start();ros::spin();return 0;
}
该节点实现的功能就是:
启动了一个 xmate_arm_controller/follow_joint_trajectory 名称的 action server,而正是这个名称的 action,才是 MoveIt 端的 action client 所喜欢的,具体原因见上一篇博客5、创建 ros_controllers.yaml 文件;
在启动的 action server 回调函数中解析了 MoveIt 规划的轨迹数据,并把该轨迹数据存储到了 moveit_msgs::RobotTrajectory 类型的变量 moveit_tra 中。
验证:
terminal 1:roscore;
terminal 2: 启动 action server 节点,rosrun xmate7_demo moveit_action_server;
此时 rostopic list 结果:

terminal 3: 启动 action client 节点,roslaunch xmate7_moveit_config_new demo.launch;
此时,终端不会报错,而且提示
[ INFO] [1658643437.543320231]: Added FollowJointTrajectory controller for xmate_arm_controller
将 Rviz 中的拖动球拖动,点击 Plan & Excute 会发现 terminal 2会按照我所写代码打印出 MoveIt 的轨迹数据。


可见,MoveIt 规划的轨迹,让机械臂从 home 姿态运动到目标姿态生成了 33 个路点,对应每个路点的位置、速度、加速度以及时间戳也都解析到了 moveit_tra 这个变量中了,以上验证表明我们自己实现的 action server 代码实现了和 MoveIt 端 action client 的 connect,并且拿到了 MoveIt 规划出来的轨迹数据。顺其自然,为了实现用 MoveIt 控制自己的真实机械臂的宏图大业,当然下一步就是将我们拿到的 trajectory 数据作为指令数据发送给真实的机械臂去执行,这将在下一篇文章中描述。
另外,上述示例 action server 代码实现方式比较简单,还可以将 action server 封装成类的形式,在类中编写回调函数,丰富 action 机制的使用接口,在类中初始化 action 对象可参照action 官网
相关文章:
MoveIt 控制自己的真实机械臂【2】——编写 action server 端代码
完成了 MoveIt 这边 action client 的基本配置,MoveIt 理论上可以将规划好的 trajectory 以 action 的形式发布出来了,浅浅尝试一下,在 terminal 中运行 roslaunch xmate7_moveit_config_new demo.launch 报错提示他在等待 xmate_arm_control…...

C#制作学生管理系统
定义学生类 定义一个简单的类来表示学生,包括学号、姓名、性别、年龄、电话、地址。再给其添加一个方法利于后续添加方法查看学生信息。 //定义学生类 public class student {public int ID { get; set; }//开放读写权限public string Name { get; set; }public i…...

python Pandas合并(单元格、sheet、excel )
安装 Pandas 和 openpyxl 首先,确保已经安装了 Pandas 和 openpyxl。可以通过 pip 安装: pip install pandas openpyxl 创建 DataFrame import pandas as pd # 创建 DataFrame df1 pd.DataFrame({ 姓名: [张三, 李四, 王五], 年龄: [25, 30, 35]…...

OJ在线编程常见输入输出练习【JavaScript】
(注:本文是对【JavaScript Node 】 ACM模式,常见输入输出练习相关内容的介绍!!!) 牛客竞赛_ACM/NOI/CSP/CCPC/ICPC算法编程高难度练习赛_牛客竞赛OJ 一、ACM模式下的编辑页面 二、ACM模式下&a…...

新能源汽车空调系统:绿色出行的舒适保障
在新能源汽车迅速发展的今天,空调系统作为提升驾乘舒适度的重要组成部分,发挥着不可或缺的作用。新能源汽车空调系统主要由压缩机、冷凝器、节流装置和蒸发器四大件组成,它们协同工作,为车内提供适宜的温度和湿度环境。 一、压缩…...

Date工具类详细汇总-Date日期相关方法
# 1024程序员节 | 征文 # 目录 简介 Date工具类单元测试 Date工具类 简介 本文章是个人总结实际工作中常用到的Date工具类,主要包含Java-jdk8以下版本的Date相关使用方法,可以方便的在工作中灵活的应用,在个人工作期间频繁使用这些时间的格…...

TMUX1308PWR规格书 数据手册 具有注入电流控制功能的 5V 双向 8:1单通道和 4:1 双通道多路复用器芯片
TMUX1308 和 TMUX1309 为通用互补金属氧化物半导体 (CMOS) 多路复用器 (MUX)。TMUX1308 是 8:1单通道(单端)多路复用器,而 TMUX1309 是 4:1 双通道(差分)多路复用器。这些器件可在源极 (Sx) 和漏极 (Dx) 引脚上支持从 …...

证件照怎么换底色?简单又快速!不看后悔
一、引言 证件照在我们的生活中有着广泛的应用,无论是求职、考试还是办理各种证件,都需要用到不同底色的证件照。传统的换底色方法往往比较复杂,需要一定的专业技能和软件操作经验。但是现在,有了更简单快捷的方法,让你…...

Rust 基础语法与常用特性
Rust 跨界:全面掌握跨平台应用开发 第一章:快速上手 Rust 1.2 基础语法与常用特性 1.2.1 数据类型与控制流 数据类型 Rust 提供了丰富的内置数据类型,主要分为标量类型和复合类型。 标量类型 标量类型表示单一的值,Rust 中…...
一、开发环境的搭建
环境搭建步骤: 下载软件安装软件运行软件 其他: Visual studio 安装包文件:https://www.alipan.com/s/nd5RgzD4e3b 下载软件 在浏览器中搜索Visual studio,选择如图的选项 点击该区域,进入该页面,【或…...

Docker:存储原理
Docker:存储原理 镜像联合文件系统overlay镜像存储结构容器存储结构 存储卷绑定挂载存储卷结构 镜像 联合文件系统 联合文件系统Union File System是一种分层,轻量且高效的文件系统。其将整个文件系统分为多个层,层与层之间进行覆盖&#x…...

ts:数组的常用方法(push、pop、shift、unshift、splice、slice)
前端css中filter的使用 一、主要内容说明二、例子(一)、push方法(尾添加)1.源码1 (push方法)2.源码1运行效果 (二)、pop方法(尾删除)1.源码2(pop方…...

物联网网关确保设备安全
物联网(IoT)网关在确保设备安全方面扮演着至关重要的角色。 作为连接物联网设备和云端或企业系统的中介,物联网网关可以实施多种安全措施来保护设备和数据。 是物联网网关确保设备安全的关键方法: 1. 设备认证和授权 认证&…...
Vue学习笔记(五)
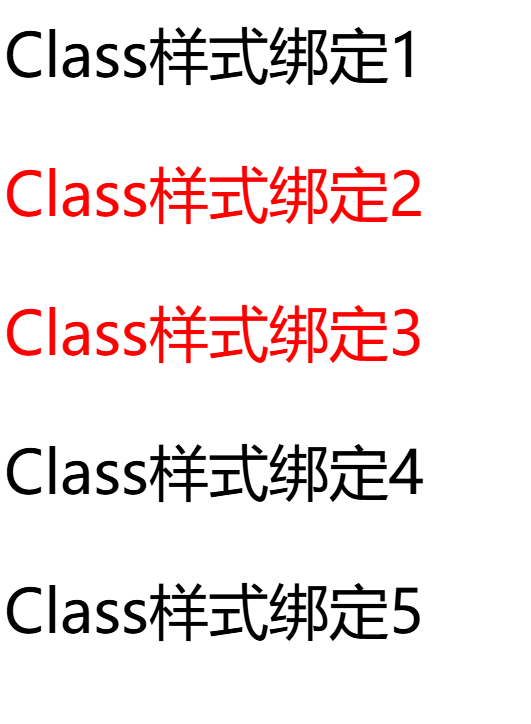
Class绑定 数据绑定的一个常见需求场景式操纵元素的CSS class列表,因为class是attribute,我们可以和其他attribute一样使用v-bind将它们和动态的字符串绑定。但是,在处理比较复杂的绑定时,通过拼接生成字符串是麻烦且易出错的。因此…...

Nestjs返回格式小结
在 NestJS 中,除了 text/event-stream(用于 Server-Sent Events)之外,还有多种格式的返回方式,具体取决于你的应用需求。以下是一些常见的返回格式及其示例: 1. JSON 格式 Get(json) getJsonResponse(Res…...
【力扣刷题实战】相同的树
大家好,我是小卡皮巴拉 文章目录 目录 力扣题目: 相同的树 题目描述 示例 1: 示例 2: 示例 3: 解题思路 题目理解 算法选择 具体思路 解题要点 完整代码(C语言) 兄弟们共勉 &#…...

Golang | Leetcode Golang题解之第515题在每个树行中找最大值
题目: 题解: func largestValues(root *TreeNode) (ans []int) {if root nil {return}q : []*TreeNode{root}for len(q) > 0 {maxVal : math.MinInt32tmp : qq nilfor _, node : range tmp {maxVal max(maxVal, node.Val)if node.Left ! nil {q …...

Zookeeper 对于 Kafka 的作用是什么?
大家好,我是锋哥。今天分享关于【Zookeeper 对于 Kafka 的作用是什么?】面试题?希望对大家有帮助; Zookeeper 对于 Kafka 的作用是什么? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 ZooKeeper 在 Kafka…...

Thread类及线程的核心操作
一. Thread类的常见构造方法 1. Thread() Thread类无参的构造方法, 用于创建Thread类的实例对象. 2. Thread(String name) 带一个参数的Thread类构造方法, 创建一个线程对象, 并给其命名. [注]: 如果不专门给线程命名, 那么线程默认的名字就是Thread-0, Thread-1, Thread-…...

算法|牛客网华为机试11-20C++
牛客网华为机试 上篇:算法|牛客网华为机试1-10C 文章目录 HJ11 数字颠倒HJ12 字符串反转HJ13 句子逆序HJ14 字符串排序HJ15 求int型正整数在内存中存储时1的个数HJ16 购物单HJ17 坐标移动HJ18 识别有效的IP地址和掩码并进行分类统计HJ19 简单错误记录HJ20 密码验证…...

3个核心功能解密:PT-Plugin-Plus如何实现PT站点种子下载效率提升
3个核心功能解密:PT-Plugin-Plus如何实现PT站点种子下载效率提升 【免费下载链接】PT-Plugin-Plus PT 助手 Plus,为 Microsoft Edge、Google Chrome、Firefox 浏览器插件(Web Extensions),主要用于辅助下载 PT 站的种子…...

如何彻底修复Windows更新故障:使用Reset Windows Update Tool的完整指南
如何彻底修复Windows更新故障:使用Reset Windows Update Tool的完整指南 【免费下载链接】Reset-Windows-Update-Tool Troubleshooting Tool with Windows Updates (Developed in Dev-C). 项目地址: https://gitcode.com/gh_mirrors/re/Reset-Windows-Update-Tool…...

Seabay:AI应用开发的一站式工具箱,解决配置、数据、服务化与监控难题
1. 项目概述:Seabay,一个面向AI应用开发的“一站式”工具集最近在GitHub上看到一个挺有意思的项目,叫seapex-ai/seabay。乍一看这个名字,可能会联想到“海贝”或者“海港”,但它的定位其实非常明确:一个为A…...

从单片机寄存器到多线程标志:volatile关键字的5个硬核使用场景详解
从单片机寄存器到多线程标志:volatile关键字的5个硬核使用场景详解 在嵌入式系统和并发编程的世界里,volatile关键字就像一位沉默的守护者,确保编译器不会自作聪明地优化掉那些看似冗余但实际上至关重要的代码。对于习惯了高层抽象语言的开发…...
ChatGPT 2026不是升级,是重构:Transformer-XL²架构、128K动态上下文、本地化模型热插拔——你还在用2023版?这5个信号说明你已被淘汰
更多请点击: https://intelliparadigm.com 第一章:ChatGPT 2026:一场从架构内核出发的范式革命 ChatGPT 2026 并非简单的能力叠加,而是以「动态稀疏混合专家(Dynamic Sparse MoE)」为核心重构推理路径&…...

保障线上服务高可用借助 Taotoken 的容灾与路由能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 保障线上服务高可用借助 Taotoken 的容灾与路由能力 对于依赖大模型 API 的线上应用而言,服务的持续可用性是核心诉求之…...

观测Taotoken在每日大赛期间API调用的延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观测Taotoken在每日大赛期间API调用的延迟与稳定性表现 在技术社区组织的每日编程挑战赛期间,开发者们通常会集中、高频…...

OAI 5G核心网搭建后,如何用Docker命令进行日常运维和故障排查?
OAI 5G核心网Docker运维实战:从日志分析到故障排查 当OAI 5G核心网完成基础部署后,真正的挑战才刚刚开始。面对由多个容器组成的复杂系统,如何快速定位AMF拒绝注册的原因?SMF的PDU会话建立失败该如何排查?本文将分享一…...
)
Azure VM SSH被锁死?别慌,用Serial Console这招救活你的服务器(亲测有效)
Azure VM SSH被锁死?Serial Console终极救援指南 当你在Azure VM上误操作sshd_config导致SSH被完全锁死时,那种绝望感就像被困在数字孤岛。常规的RDP、Bastion甚至重建VM都无济于事——直到发现Serial Console这个隐藏的救命通道。作为经历过同样噩梦的运…...
)
WinForm弹窗进阶:手把手教你封装一个通用的MessageBoxHelper工具类(.NET Framework/C#)
WinForm弹窗进阶:打造高复用性的MessageBoxHelper工具类 在WinForm开发中,MessageBox.Show()就像空气一样无处不在——从简单的操作确认到复杂的错误处理,这个基础组件承担了太多交互职责。但当你第20次写下MessageBox.Show("操作成功&q…...