C++基础(11.AVL树的实现)
目录
AVL的概念:
AVL树的实现:
AVL树的结构:
AVL树的插⼊:
平衡因⼦更新:
旋转:
AVL树的其他功能:
AVL树平衡检测:
测试代码*2:
源代码:
KV结构:
源代码:
AVL的概念:
- AVL树是最先发明的⾃平衡⼆叉查找树,AVL是⼀颗空树,或者具备下列性质的⼆叉搜索树:它的 左右⼦树都是AV树,且左右⼦树的⾼度差的绝对值不超过1。AVL树是⼀颗⾼度平衡搜索⼆叉树, 通过控制⾼度差去控制平衡。
- AVL树得名于它的发明者G. M. Adelson-Velsky和E. M. Landis是两个前苏联的科学家,他们在1962 年的论⽂《An algorithm for the organization of information》中发表了它。
- AVL树实现这⾥我们引⼊⼀个平衡因⼦(balance factor)的概念,每个结点都有⼀个平衡因⼦,任何结点的平衡因⼦等于右⼦树的⾼度减去左⼦树的⾼度,也就是说任何结点的平衡因⼦等于0/1/-1, AVL树并不是必须要平衡因⼦,但是有了平衡因⼦可以更⽅便我们去进⾏观察和控制树是否平衡, 就像⼀个⻛向标⼀样。
- 思考⼀下为什么AVL树是⾼度平衡搜索⼆叉树,要求⾼度差不超过1,⽽不是⾼度差是0呢?0不是更好的平衡吗?画画图分析我们发现,不是不想这样设计,⽽是有些情况是做不到⾼度差是0的。⽐如⼀棵树是2个结点,4个结点等情况下,⾼度差最好就是1,⽆法作为⾼度差是0
- AVL树整体结点数量和分布和完全⼆叉树类似,⾼度可以控制在 ,那么增删查改的效率也可 以控制在 ,相⽐⼆叉搜索树有了本质的提升。


AVL树的实现:
AVL树的结构:

AVL树的插⼊:
- 插⼊⼀个值按⼆叉搜索树规则进⾏插⼊。
- 新增结点以后,只会影响祖先结点的⾼度,也就是可能会影响部分祖先结点的平衡因⼦,所以更新 从新增结点->根结点路径上的平衡因⼦,实际中最坏情况下要更新到根,有些情况更新到中间就可以停⽌了。
- 更新平衡因⼦过程中没有出现问题,则插⼊结束
- 更新平衡因⼦过程中出现不平衡,对不平衡⼦树旋转,旋转后本质调平衡的同时,本质降低了⼦树 的⾼度,不会再影响上⼀层,所以插⼊结束。
平衡因⼦更新:
- 平衡因⼦ = 右⼦树⾼度-左⼦树⾼度
- 只有⼦树⾼度变化才会影响当前结点平衡因⼦。
- 插⼊结点,会增加⾼度,所以新增结点在parent的右⼦树,parent的平衡因⼦++,新增结点在 parent的左⼦树,parent平衡因⼦- -
- parent所在⼦树的⾼度是否变化决定了是否会继续往上更新
- 更新后parent的平衡因⼦等于0,更新中parent的平衡因⼦变化为-1——>0 或者 1——>0,说明更新前 parent⼦树⼀边⾼⼀边低,新增的结点插⼊在低的那边,插⼊后parent所在的⼦树⾼度不变,不会 影响parent的⽗亲结点的平衡因⼦,更新结束。
- 更新后parent的平衡因⼦等于1 或 -1,更新前更新中parent的平衡因⼦变化为0——>1 或者 0——>-1,说 明更新前parent⼦树两边⼀样⾼,新增的插⼊结点后,parent所在的⼦树⼀边⾼⼀边低,parent所 在的⼦树符合平衡要求,但是⾼度增加了1,会影响arent的⽗亲结点的平衡因⼦,所以要继续向上更新。
- 更新后parent的平衡因⼦等于2 或 -2,更新前更新中parent的平衡因⼦变化为1——>2 或者 -1——>-2,说 明更新前parent⼦树⼀边⾼⼀边低,新增的插⼊结点在⾼的那边,parent所在的⼦树⾼的那边更⾼ 了,破坏了平衡,parent所在的⼦树不符合平衡要求,需要旋转处理,旋转的⽬标有两个:
- 把 parent⼦树旋转平衡。
- 降低parent⼦树的⾼度,恢复到插⼊结点以前的⾼度。所以旋转后也不 需要继续往上更新,插⼊结束。
例子:





旋转:
当树平衡时进行旋转来让AVL平衡是重点!!!
旋转的原则:
- 保持搜索树的规则
- 让旋转的树从不满⾜变平衡,其次降低旋转树的⾼度旋转总共分为四种,左单旋/右单旋/左右双旋/右左双旋。 说明:下⾯的图中,有些结点我们给的是具体值,如10和5等结点,这⾥是为了⽅便讲解,实际中是什么值都可以,只要⼤⼩关系符合搜索树的规则即可
右单旋:
- 本图展⽰的是10为根的树,有a/b/c抽象为三棵⾼度为h的⼦树(h>=0),a/b/c均符合AVL树的要 求。10可能是整棵树的根,也可能是⼀个整棵树中局部的⼦树的根。这⾥a/b/c是⾼度为h的⼦树, 是⼀种概括抽象表⽰,他代表了所有右单旋的场景,实际右单旋形态有很多种,具体图2/图3/图4/ 图5进⾏了详细描述。
- 在a⼦树中插⼊⼀个新结点,导致a⼦树的⾼度从h变成h+1,不断向上更新平衡因⼦,导致10的平 衡因⼦从-1变成-2,10为根的树左右⾼度差超过1,违反平衡规则。10为根的树左边太⾼了,需要 往右边旋转,控制两棵树的平衡。
- 旋转核⼼步骤,因为5 < b⼦树的值 < 10,将b变成10的左⼦树,10变成5的右⼦树,5变成这棵树新的根,符合搜索树的规则,控制了平衡,同时这棵的⾼度恢复到了插⼊之前的h+2,符合旋转原 则。如果插⼊之前10整棵树的⼀个局部⼦树,旋转后不会再影响上⼀层,插⼊结束了。


parent有可能是整棵树的根,也可能是局部的⼦树



- 本图展⽰的是10为根的树,有a/b/c抽象为三棵⾼度为h的⼦树(h>=0),a/b/c均符合AVL树的要 求。10可能是整棵树的根,也可能是⼀个整棵树中局部的⼦树的根。这⾥a/b/c是⾼度为h的⼦树, 是⼀种概括抽象表⽰,他代表了所有右单旋的场景,实际右单旋形态有很多种,具体跟上⾯左旋类 似。
- 在a⼦树中插⼊⼀个新结点,导致a⼦树的⾼度从h变成h+1,不断向上更新平衡因⼦,导致10的平 衡因⼦从1变成2,10为根的树左右⾼度差超过1,违反平衡规则。10为根的树右边太⾼了,需要往 左边旋转,控制两棵树的平衡。
- 旋转核⼼步骤,因为10 < b⼦树的值 < 15,将b变成10的右⼦树,10变成15的左⼦树,15变成这棵 树新的根,符合搜索树的规则,控制了平衡,同时这棵的⾼度恢复到了插⼊之前的h+2,符合旋转 原则。如果插⼊之前10整棵树的⼀个局部⼦树,旋转后不会再影响上⼀层,插⼊结束了。







- 场景1:h >= 1时,新增结点插⼊在e⼦树,e⼦树⾼度从h-1并为h并不断更新8->5->10平衡因⼦, 引发旋转,其中8的平衡因⼦为-1,旋转后8和5平衡因⼦为0,10平衡因⼦为1。
- 场景2:h >= 1时,新增结点插⼊在f⼦树,f⼦树⾼度从h-1变为h并不断更新8->5->10平衡因⼦,引 发旋转,其中8的平衡因⼦为1,旋转后8和10平衡因⼦为0,5平衡因⼦为-1。
- 场景3:h == 0时,a/b/c都是空树,b⾃⼰就是⼀个新增结点,不断更新5->10平衡因⼦,引发旋转,其中8的平衡因⼦为0,旋转后8和10和5平衡因⼦均为0。


- 场景1:h >= 1时,新增结点插⼊在e⼦树,e⼦树⾼度从h-1变为h并不断更新12->15->10平衡因 ⼦,引发旋转,其中12的平衡因⼦为-1,旋转后10和12平衡因⼦为0,15平衡因⼦为1。
- 场景2:h >= 1时,新增结点插⼊在f⼦树,f⼦树⾼度从h-1变为h并不断更新12->15->10平衡因⼦, 引发旋转,其中12的平衡因⼦为1,旋转后15和12平衡因⼦为0,10平衡因⼦为-1。
- 场景3:h == 0时,a/b/c都是空树,b⾃⼰就是⼀个新增结点,不断更新15->10平衡因⼦,引发旋转,其中12的平衡因⼦为0,旋转后10和12和15平衡因⼦均为0。



AVL树的其他功能:







删除:

AVL树平衡检测:
我们实现的AVL树是否合格,我们通过检查左右⼦树⾼度差的的程序进⾏反向验证,同时检查⼀下结点的平衡因⼦更新是否出现了问题。


测试代码*2:


源代码:
AVL.h
#pragma once
#define CRT_SECURE_NO_WARNINGS
#include <iostream>using namespace std;template<class T>
struct AVLTreeNode
{AVLTreeNode(const T& data = T()): _Left(nullptr), _Right(nullptr), _Parent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _Left;AVLTreeNode<T>* _Right;AVLTreeNode<T>* _Parent;T _data;int _bf; // 节点的平衡因子
};// AVL: 二叉搜索树 + 平衡因子的限制
template<class T>
class AVLTree
{typedef AVLTreeNode<T> Node;public:AVLTree(): _Root(nullptr){}void RotateR(Node* parent) //右单旋====================================================================={//cout << endl << "右单旋" << parent->_data << endl;Node* subL = parent->_Left;Node* subLR = subL->_Right;Node* parentParent = parent->_Parent;parent->_Left = subLR;if (subLR)subLR->_Parent = parent;subL->_Right = parent;parent->_Parent = subL;// parent有可能是整棵树的根,也可能是局部的⼦树// 如果是整棵树的根,要修改_rootif (parentParent == nullptr){_Root = subL;subL->_Parent = nullptr;}//如果是局部的指针要跟上⼀层链接else{if (parent == parentParent->_Left){parentParent->_Left = subL;}else{parentParent->_Right = subL;}subL->_Parent = parentParent;}parent->_bf = subL->_bf = 0;}void RotateL(Node* parent) //左单旋====================================================================={//cout << endl << "左单旋" << parent->_data << endl;Node* subR = parent->_Right;Node* subRL = subR->_Left;Node* parentParent = parent->_Parent;parent->_Right = subRL;if (subRL)subRL->_Parent = parent;subR->_Left = parent;parent->_Parent = subR;// parent有可能是整棵树的根,也可能是局部的⼦树// 如果是整棵树的根,要修改_rootif (parentParent == nullptr){_Root = subR;subR->_Parent = nullptr;}//如果是局部的指针要跟上⼀层链接else{if (parent == parentParent->_Left){parentParent->_Left = subR;}else{parentParent->_Right = subR;}subR->_Parent = parentParent;}parent->_bf = subR->_bf = 0;}void RotateLR(Node* parent) //左右双旋====================================================================={//cout << endl << "左右双旋" << parent->_data << endl;Node* subL = parent->_Left;Node* subLR = subL->_Right;int bf = subLR->_bf;RotateL(parent->_Left);RotateR(parent);if (bf == 0){subL->_bf = 0;subLR->_bf = 0;parent->_bf = 0;}else if (bf == -1){subL->_bf = 0;subLR->_bf = 0;parent->_bf = 1;}else if (bf == 1){subL->_bf = -1;subLR->_bf = 0;parent->_bf = 0;}else{//assert(false);}}void RotateRL(Node* parent) //右左双旋====================================================================={//cout << endl << "右左双旋" << parent->_data << endl;Node* subR = parent->_Right;Node* subRL = subR->_Left;int bf = subRL->_bf;RotateR(parent->_Right);RotateL(parent);if (bf == 0){subR->_bf = 0;subRL->_bf = 0;parent->_bf = 0;}else if (bf == 1){subR->_bf = 0;subRL->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;subRL->_bf = 0;parent->_bf = 0;}else{//assert(false);}}// 在AVL树中插入值为data的节点bool Insert(const T& data){//cout << "插入:" << data << " ";if (_Root == nullptr) //插入树为空的情况{_Root = new Node(data);return true;} else //插入树不空的情况{Node* cur = _Root;Node* cur_parent = nullptr;while (cur != nullptr) //找到插入位置{if (cur->_data > data){cur_parent = cur;cur = cur->_Left;}else if(cur->_data < data){cur_parent = cur;cur=cur->_Right;}else{return false;}}cur = new Node(data);if (cur_parent->_data > cur->_data) //链接插入节点{cur_parent->_Left = cur;cur->_Parent = cur_parent;}else{cur_parent->_Right = cur;cur->_Parent = cur_parent;}while (cur_parent) //更新平衡因子{if (cur_parent->_Left == cur)--cur_parent->_bf;else++cur_parent->_bf;if (cur_parent->_bf == 0){//更新停止break;}else if (cur_parent->_bf == 1 || cur_parent->_bf == -1){//继续向上更新cur = cur_parent;cur_parent = cur_parent->_Parent;}else if (cur_parent->_bf == -2 || cur_parent->_bf == 2){//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!不平衡了,需要进行旋转处理!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!if (cur_parent->_bf == -2 && cur->_bf == -1){RotateR(cur_parent);}else if (cur_parent->_bf == 2 && cur->_bf == 1){RotateL(cur_parent);}else if (cur_parent->_bf == -2 && cur->_bf == 1){RotateLR(cur_parent);}else if (cur_parent->_bf == 2 && cur->_bf == -1){RotateRL(cur_parent);}else{//assert(false);}break;}}}return true;};//------------------------------------------------------------------------------------------------------------Node* Find(const T& data) //查找{Node* cur = _Root;while (cur){if (cur->_data < data){cur = cur->_Right;}else if (cur->_data > data){cur = cur->_Left;}else{return cur;}}return nullptr;}void InOrder() //输出{_InOrder(_Root);cout << endl;}int Height(){return _Height(_Root);}int Size(){return _Size(_Root);}bool IsBalanceTree(){return _IsBalanceTree(_Root);}private:Node* _Root;void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_Left);cout << root->_data << endl;_InOrder(root->_Right);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_Left);int rightHeight = _Height(root->_Right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}int _Size(Node* root){if (root == nullptr)return 0;return _Size(root->_left) + _Size(root->_right) + 1;}bool _IsBalanceTree(Node* root){// 空树也是AVL树if (nullptr == root)return true;// 计算pRoot结点的平衡因子:即pRoot左右子树的高度差int leftHeight = _Height(root->_Left);int rightHeight = _Height(root->_Right);int diff = rightHeight - leftHeight;// 如果计算出的平衡因子与pRoot的平衡因子不相等,或者// pRoot平衡因子的绝对值超过1,则一定不是AVL树if (abs(diff) >= 2){cout << root->_data << "高度差异常" << endl;return false;}if (root->_bf != diff){cout << root->_data << "平衡因子异常" << endl;return false;}// pRoot的左和右如果都是AVL树,则该树一定是AVL树return _IsBalanceTree(root->_Left) && _IsBalanceTree(root->_Right);}
};AVL_test.cpp
#include "AVL_Tree.h"
#include <vector>;-----------------------------检查----------------------------------------------------------
//
//
----------------------------------------------------------------------------
// // 测试代码
void TestAVLTree1()
{AVLTree<int> t;// 常规的测试用例//int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };// 特殊的带有双旋场景的测试用例int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto e : a){t.Insert(e);}cout << endl << endl << endl;t.InOrder();cout << t.IsBalanceTree() << endl;
}// 插⼊⼀堆随机值,测试平衡,顺便测试⼀下⾼度和性能等
void TestAVLTree2()
{const int N = 100000;vector<int> v;v.reserve(N);srand(time(0));for (size_t i = 0; i < N; i++){v.push_back(rand() + i);}size_t begin2 = clock();AVLTree<int> t;for (auto e : v){t.Insert(e);}size_t end2 = clock();cout << "Insert:" << end2 - begin2 << endl;cout << t.IsBalanceTree() << endl;cout << "Height:" << t.Height() << endl;//cout << "Size:" << Size(&t) << endl;size_t begin1 = clock();// 确定在的值//for (auto e : v)//{// if (t.Find(e) == nullptr)cout << "err_of_find";//}//随机值for (size_t i = 0; i < N; i++){t.Find((rand() + i));}size_t end1 = clock();cout << "Find:" << end1 - begin1 << endl;
}
//
------------------------------------------------------------------------------------int main()
{//TestAVLTree1();TestAVLTree2();return 0;
}KV结构:
将data改为pair< K , V >类型并且做一些改动即可
源代码:
. h
#pragma once#include<iostream>
#include<assert.h>
using namespace std;template<class K, class V>
struct AVLTreeNode
{// 需要parent指针,后续更新平衡因子可以看到pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _bf(0){}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}// 链接父亲cur->_parent = parent;// 控制平衡// 更新平衡因子while (parent){if (cur == parent->_left)parent->_bf--;elseparent->_bf++;if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else{assert(false);}break;}else{assert(false);}}return true;}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if(subLR)subLR->_parent = parent;Node* pParent = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (pParent->_left == parent){pParent->_left = subL;}else{pParent->_right = subL;}subL->_parent = pParent;}subL->_bf = 0;parent->_bf = 0;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* parentParent = parent->_parent;subR->_left = parent;parent->_parent = subR;if (parentParent == nullptr){_root = subR;subR->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}parent->_bf = subR->_bf = 0;}void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (bf == 1){subLR->_bf = 0;subL->_bf = -1;parent->_bf = 0;}else if (bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false);}}void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){subR->_bf = 0;subRL->_bf = 0;parent->_bf = 0;}else if (bf == 1){subR->_bf = 0;subRL->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;subRL->_bf = 0;parent->_bf = 0;}else{assert(false);}}void InOrder(){_InOrder(_root);cout << endl;}int Height(){return _Height(_root);}int Size(){return _Size(_root);}bool IsBalanceTree(){return _IsBalanceTree(_root);}Node* Find(const K& key){Node* cur = _root;while (cur){if (cur->_kv.first < key){cur = cur->_right;}else if (cur->_kv.first > key){cur = cur->_left;}else{return cur;}}return nullptr;}private:void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}int _Size(Node* root){if (root == nullptr)return 0;return _Size(root->_left) + _Size(root->_right) + 1;}bool _IsBalanceTree(Node* root){// 空树也是AVL树if (nullptr == root)return true;// 计算pRoot结点的平衡因子:即pRoot左右子树的高度差int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);int diff = rightHeight - leftHeight;// 如果计算出的平衡因子与pRoot的平衡因子不相等,或者// pRoot平衡因子的绝对值超过1,则一定不是AVL树if (abs(diff) >= 2){cout << root->_kv.first << "高度差异常" << endl;return false;}if (root->_bf != diff){cout << root->_kv.first << "平衡因子异常" << endl;return false;}// pRoot的左和右如果都是AVL树,则该树一定是AVL树return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);}
private:Node* _root = nullptr;
};. cpp
#define _CRT_SECURE_NO_WARNINGS 1
#include<vector>
#include"AVLTree.h"void TestAVLTree1()
{AVLTree<int, int> t;// 常规的测试用例int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };// 特殊的带有双旋场景的测试用例//int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto e : a){t.Insert({ e, e });}t.InOrder();cout << t.IsBalanceTree() << endl;
}// 插入一堆随机值,测试平衡,顺便测试一下高度和性能等
void TestAVLTree2()
{const int N = 1000000;vector<int> v;v.reserve(N);srand(time(0));for (size_t i = 0; i < N; i++){v.push_back(rand() + i);}size_t begin2 = clock();AVLTree<int, int> t;for (auto e : v){t.Insert(make_pair(e, e));}size_t end2 = clock();cout << "Insert:" << end2 - begin2 << endl;cout << t.IsBalanceTree() << endl;cout << "Height:" << t.Height() << endl;cout << "Size:" << t.Size() << endl;size_t begin1 = clock();// 确定在的值for (auto e : v){t.Find(e);}// 随机值/*for (size_t i = 0; i < N; i++){t.Find((rand() + i));}*/size_t end1 = clock();cout << "Find:" << end1 - begin1 << endl;
}int main()
{TestAVLTree2();return 0;
}
相关文章:
C++基础(11.AVL树的实现)
目录 AVL的概念: AVL树的实现: AVL树的结构: AVL树的插⼊: 平衡因⼦更新: 旋转: AVL树的其他功能: AVL树平衡检测: 测试代码*2: 源代码: KV结构: 源代码: AVL…...

c# 抽象方法 虚函数 使用场景
在C#中,抽象方法(abstract method)和虚函数(virtual method)都是用于实现多态性(polymorphism)的重要特性,但它们在使用上有一些关键的区别和各自的用途。 抽象方法(Abs…...

大数据安全方案 验证
一、背景 文档用于记录配置 Kerberos 和 Ranger 后,对 HDFS、Hive 认证和鉴权的功能测试。 二、Kerberos 验证 2.1、验证功能 1,HDFS 认证 2.1.1、访问 HDFS Kerberos 验证前,访问 HDFS 失败。 Kerberos 验证后,访问 HDFS 成…...
电脑软件:推荐一款免费且实用的电脑开关机小工具
目录 一、软件简介 二、软件功能 三、软件特点 四、使用说明 五、软件下载 今天给大家推荐一款免费且实用的电脑开关机小工具KShutdown,有需要的朋友可以下载试一下! 一、软件简介 KShutdown是一款精巧且实用的定时自动关机小工具,对于…...

php反序列化靶场随笔分析
项目地址:github.com/mcc0624/php_ser_Class 推荐使用docker部署:https://hub.docker.com/r/mcc0624/ser/tags 前面讲了以下php基础,我们直接从class6开始实验 class6 访问页面,传一个序列化的字符串,php代码将其反…...

动态规划 - 编辑距离
115. 不同的子序列 困难 给你两个字符串 s 和 t ,统计并返回在 s 的 子序列 中 t 出现的个数,结果需要对 10^9 7 取模。 算法思想:利用动态规划,分s[i - 1] 与 t[j - 1]相等,s[i - 1] 与 t[j - 1] 不相等两种情况具…...
力扣——113. 路径总和
113. 路径总和 II 给你二叉树的根节点 root 和一个整数目标和 targetSum ,找出所有 从根节点到叶子节点 路径总和等于给定目标和的路径。 叶子节点 是指没有子节点的节点。 示例 1: 输入:root [5,4,8,11,null,13,4,7,2,null,null,5,1], t…...

C02S04-Ubuntu基本使用
一、Ubuntu初始配置 1. 使用root用户 Ubuntu系统默认只能使用普通用户,要想使用root用户,需要先设置root用户密码。 进入终端,配置root用户密码。按照提示输入密码。 sudo passwd root配置完成后,执行下面的密码,切换…...

C语言 | Leetcode C语言题解之第525题连续数组
题目: 题解: struct HashTable {int key, val;UT_hash_handle hh; };int findMaxLength(int* nums, int numsSize) {int maxLength 0;struct HashTable* hashTable NULL;struct HashTable* tmp malloc(sizeof(struct HashTable));tmp->key 0, tm…...

Qml-Transition的使用
Qml-Transition的使用 Transition的概述 Transition:定义了当状态发生改变时应用的动画属性animations : list:(Transition)过渡的动画属性enabled : bool:状态发生变化时,是否使能此过渡(Transition)动画…...

Notepad++检索包含多个关键字的行
Notepad检索包含多个关键字的行 在Notepad中,你可以使用正则表达式来检索包含多个关键字的行。以下是具体步骤: 打开Notepad,打开要搜索的文件。 点击菜单栏上的“搜索”选项,然后选择“查找”。 在弹出的查找对话框中…...

C语言:水仙花树,要求三位以上的N位整数每位的N次方等于数本身,全部输出出来
#include <stdio.h> int main() { int n; scanf("%d",&n);//这里是说明多少n位整数 int first1; int i1; while(i<n){//此while循环可以得到n位数的最小位,例如3位的100. first*10; i; } ifirst; whil…...
金融贷款口子超市V2源码 Thinkphp开发的贷款和超市平台源码(亲测源码含安装视频教程)
金融贷款口子超市V2源码 Thinkphp开发的贷款和超市平台源码 源码下载:https://download.csdn.net/download/m0_66047725/89938268 更多资源下载:关注我。...

redis的三种客户端
在 Redis 中,常用的 Java 客户端有三种:Jedis、Lettuce 和 Redisson。它们各有特点,适用于不同的场景。以下是它们的详细介绍,以及如何在 Spring Boot 中集成 Redis。 一、Redis 三种常用客户端详解 1.1 Jedis Jedis 是 Redis 官…...
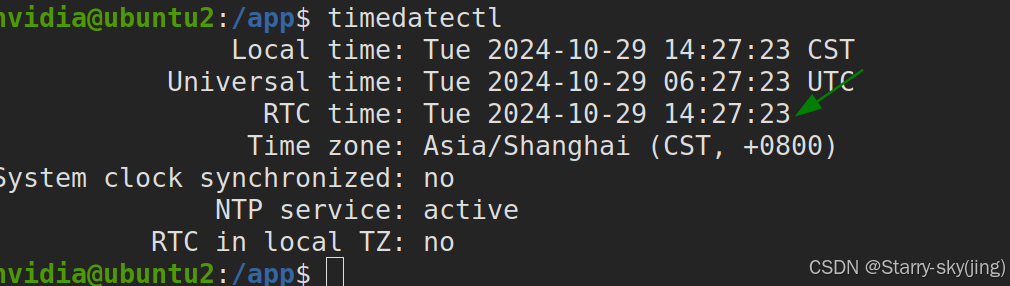
边缘计算【智能+安全检测】系列教程--agx orin解决RTC时间问题
因为是离线运行,首要问题是时间不准确,就在主板上加装了纽扣电池,但是会有一系列问题,比如无法将RTC时间回写到系统时间,或者无法将系统时间写到RTC中等等一些列问题。为解决这些问题,一劳永逸的方式&#…...

数据库动态扩容:Java实现与技术策略
引言 数据库动态扩容是应对数据量增长和业务需求变化的关键技术。它允许数据库系统在不停机的情况下,通过增加或减少资源来适应业务负载的变化。本文将详细介绍数据库动态扩容的工作原理、技术策略,并提供Java代码示例。 1. 数据库动态扩容的工作原理 …...

Golang | Leetcode Golang题解之第525题连续数组
题目: 题解: func findMaxLength(nums []int) (maxLength int) {mp : map[int]int{0: -1}counter : 0for i, num : range nums {if num 1 {counter} else {counter--}if prevIndex, has : mp[counter]; has {maxLength max(maxLength, i-prevIndex)} …...

低代码架构浅析
低代码的定义与应用场景 定义 低代码平台是一种通过可视化工具和预定义组件实现快速应用开发的环境,显著减少了编码量。它旨在简化开发流程,加快应用交付,提高开发效率,使非技术人员也能参与应用开发。 应用场景 企业内部应用 …...

mysql字段是datetime如何按照小时来统计
在 MySQL 中,如果你有一个包含 DATETIME 类型的列,并且你想按照小时来统计数据,可以使用 DATE_FORMAT 函数将 DATETIME 列格式化为仅包含日期和小时的形式,然后使用 GROUP BY 子句来分组。 假设你有一个名为 events 的表…...

nacos快速启动
预备环境准备: 确保是64 bit OS(推荐Linux/Unix/Mac),安装64 bit JDK 1.8并下载&配置,安装Maven 3.2.x并下载&配置。 下载源码或者安装包: 从Github上下载源码方式: git clone https://…...

座机号码认证支持哪些机型?固话企业认证覆盖华为/小米/OPPO/vivo等手机
很多做业务的朋友都有这种体会:好不容易联系到一个精准意向客户,电话拨过去,还没等开口,对方直接挂断。更有甚者,手机屏幕上赫然跳出“疑似推销”四个大字。现在的职场沟通,信任成本高得离谱。如果你还指望…...

无王无帝定乾坤,来自田间第一人 道统传承兴万民
无王无帝定乾坤 来自田间第一人 华夏千载文脉绵延,万古道统源远流长,自古圣贤立心传道,只为正本清源、润泽苍生。往昔道统多依附王权存续,受朝堂礼制所拘,流传受限,难入寻常百姓之家,普惠世间之…...
)
ArcGIS Pro脚本工具实战:5分钟用arcpy给要素批量‘改名’(保姆级参数配置指南)
ArcGIS Pro脚本工具实战:5分钟用arcpy给要素批量‘改名’(保姆级参数配置指南) 当你在处理上百个GIS图层时,是否曾被重复的"右键-属性-修改别名"操作折磨到崩溃?上周我接手一个城市管网项目,需要…...

Claude Code 2026 路线图深度拆解:5 大新增能力与企业级项目落地时间表
1. 5 大新增能力不是“功能列表”,而是上下文治理的5个切口 大多数人看到「Claude Code 2026 路线图」的第一反应,是去官网截图那张带箭头和时间轴的PPT——然后立刻开始评估“哪个功能我团队下周就能用上”。我试过。去年Q4我们团队在三个项目里并行接入了路线图中已发布的…...

Netduino Plus 2硬实时驱动WS2812:托管环境下的纳秒级GPIO控制实战
1. 项目概述:当托管环境遇上纳秒级时序如果你玩过嵌入式开发,尤其是用Arduino驱动过WS2812(也就是Adafruit的NeoPixels),那你肯定知道那套经典的Adafruit_NeoPixel库,几行代码就能让灯带流光溢彩。但当你把…...

嵌入式C语言单元测试实战:Unity框架入门与工程实践
1. 项目概述:为什么嵌入式开发也需要单元测试?在嵌入式开发领域,尤其是使用C语言进行单片机、RTOS或裸机程序开发时,我们常常陷入一种“烧录-看灯-调串口”的循环。代码逻辑稍微复杂一点,比如一个状态机或者一个协议解…...

别再手动调寄存器了!用Simulink给F28335 DSP配置ePWM,20kHz互补带死区输出一次搞定
告别寄存器调试:用Simulink图形化配置F28335 DSP的ePWM模块 在电机控制和电源逆变器开发中,PWM信号生成是核心环节。传统开发方式需要工程师反复查阅数百页的数据手册,手动计算并配置数十个寄存器参数,一个简单的死区时间设置就可…...

如何用Path of Building物品制作系统打造终极装备:5个简单步骤
如何用Path of Building物品制作系统打造终极装备:5个简单步骤 【免费下载链接】PathOfBuilding Offline build planner for Path of Exile. 项目地址: https://gitcode.com/gh_mirrors/pat/PathOfBuilding 你是否曾为《流放之路》中装备制作耗费大量通货却得…...

从FM收音机到5G基站:拆解DDS技术如何悄悄改变我们的通信设备
从FM收音机到5G基站:拆解DDS技术如何悄悄改变我们的通信设备 上世纪90年代,当人们第一次在车载收音机上按下"自动搜台"按钮时,很少有人意识到这个流畅体验背后隐藏着一项革命性技术——直接数字频率合成(DDS)…...

Taotoken多模型API助力MATLAB用户解决复杂建模问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken多模型API助力MATLAB用户解决复杂建模问题 对于在MATLAB环境中进行算法开发与系统仿真的研究人员而言,日常工作…...