履带机器人(一、STM32控制部分--标准库)
一、履带机器人整体逻辑框架
通过在PC端搭建上位机,使得在PC端可以给STM32发送控制指令并且接受STM32的状态信息。
通过RS485通信,使得STM32可以和电机进行通信,STM32发送启动、停止、转速、方向等指令,并接受电机返回的状态信息。

二、STM32逻辑框架
整体逻辑:
1、先初始化串口和引脚
2、通过STM32给电机发送RS485控制模式数组
3、电机接收到数组,设置控制模式为RS485控制,并返回一串数组。
4、通过STM32发送调取电机状态数组
5、电机接收到数组,并返回17组数组,表示当前的转速,方向,温度等状态信息
6、将这17组数组发送给PC端
7、循环往复
8、当PC端发送遥控器控制数组时,则更改为遥控器控制
9、当PC端发送电机转速,方向数组时,将数组赋值给电机。

三、代码具体介绍
1、初始化串口、定时器、引脚
(1)串口1初始化并编写串口中断函数
void uart_init(u32 bound){//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //USART1_TX GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9//USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器//USART 初始化设置USART_InitStructure.USART_BaudRate = bound;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断USART_Cmd(USART1, ENABLE); //使能串口1 }
(2)串口2初始化并编写串口中断函数
void RS485_Init(void)
{USART_InitTypeDef USART_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD,ENABLE);//GPIOkou_InittiGPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_InitStructur相关文章:
履带机器人(一、STM32控制部分--标准库)
一、履带机器人整体逻辑框架 通过在PC端搭建上位机,使得在PC端可以给STM32发送控制指令并且接受STM32的状态信息。 通过RS485通信,使得STM32可以和电机进行通信,STM32发送启动、停止、转速、方向等指令,并接受电机返回的状态信息。 二、STM32逻辑框架 整体逻辑: 1、先…...

地理空间-Java实现航迹稀释
Java实现航迹点稀释算法(Douglas - Peucker算法)的示例代码,该算法可在保证航迹整体形状变化不大的情况下减少航迹点数量: import java.util.ArrayList; import java.util.List; class Point { double x; double y; public Point…...

qt QHttpMultiPart详解
1. 概述 QHttpMultiPart是Qt框架中用于处理HTTP多部分请求的类。它类似于RFC 2046中描述的MIME multipart消息,允许在单个HTTP请求中包含多个数据部分,如文件、文本等。这种多部分请求在上传文件或发送带有附件的邮件等场景中非常有用。QHttpMultiPart类…...

【测试】【Debug】vscode中同一个测试用例出现重复
这种是正常的情况 当下面又出现一个 类似python_test->文件夹名->test_good ->test_pad 同一个测试用例出现两次,名称都相同,显然是重复了。那么如何解决? 这种情况是因为在终端利用“pip install pytest”安装 之后,又…...

Mac上的免费压缩软件-FastZip使用体验实测
FastZip是Mac上的一款免费的压缩软件,分享一下我在日常使用中的体验 压缩格式支持7Z、Zip,解压支持7Z、ZIP、RAR、TAR、GZIP、BZIP2、XZ、LZIP、ACE、ISO、CAB、PAX、JAR、AR、CPIO等所有常见格式的解压 体验使用下来能满足我所有的压缩与解压的需求&a…...

Linux(CentOS)运行 jar 包
1、在本地终端运行,关闭终端,程序就会终止 java -jar tlias-0.0.1-SNAPSHOT.jar 发送请求,成功 关闭终端(程序也会终止) 发送请求,失败 2、在远程终端运行,关闭终端,程序就会终止 …...

基于YOLOv8 Web的安全帽佩戴识别检测系统的研究和设计,数据集+训练结果+Web源码
摘要 在工地,制造工厂,发电厂等地方,施工人佩戴安全帽能有效降低事故发生概率,在工业制造、发电等领域需要进行施工人员安全帽监测。目前大多数的 YOLO 模型还拘泥于公司、企业开发生产的具体产品中,大多数无编程基础…...
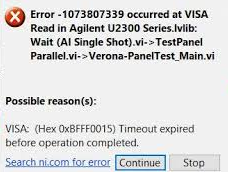
LabVIEW VISA通信常见问题
在工业自动化和测试测量等应用中,使用LabVIEW的VISA函数与设备进行通信时,若发送指令后未能接收数据,以下因素可能是原因: 设备未响应或响应延迟应用示例:例如,在控制测量仪器(如电压表…...
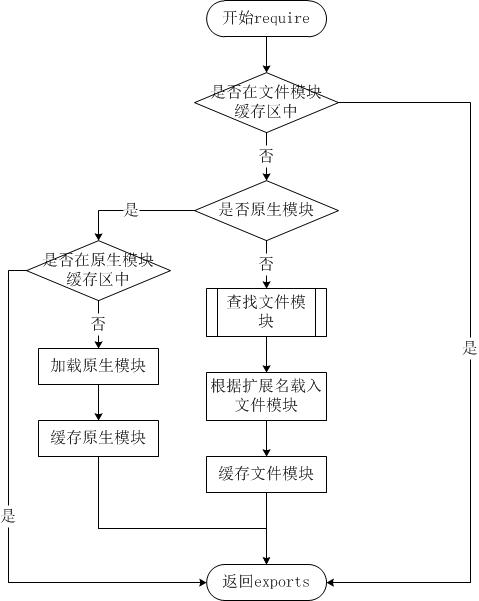
Node.js Stream(流)以及模块系统使用介绍 (基础介绍 五)
Stream(流) Stream 是 Node.js 中非常重要的一个模块,应用广泛。 Stream 是一个抽象接口,Node 中有很多对象实现了这个接口。例如,对http 服务器发起请求的request 对象就是一个 Stream,还有stdout(标准输出…...

嵌入式linux中设备树控制硬件的方法
大家好,今天主要给大家分享一下,如何使用linux系统下的设备树进行硬件控制方法。 第一:linux系统中设备树驱动LED原理 在linux系统中可以使用设备树向Linux内核传递相关的寄存器地址,linux驱动中使用OF函数从设备树中获取所需的属性值,然后使用获取到的属性值来初始化相关…...

定时器入门:Air780E定时器基础与进阶
今天我们学习的是Air780E定时器基础与进阶,让大家更深入的了解定时器。 一、定时器(timer)的概述 在Air780E模组搭载的LuatOS系统中,定时器(timer)是一项基础且关键的服务。它允许开发者在特定的时间点或周期性地执行代码段&…...

Java LeetCode练习
3216. 交换后字典序最小的字符串 package JavaExercise;public class Exercise {public static void main(String[] args) {String s "45320";Solution solution new Solution();System.out.println(solution.getSmallestString(s));} }class Solution {public St…...

go 集成go-redis 缓存操作
一、什么是Go Redis 这是一个流行的Go语言Redis客户端库,它提供了细化的API,对每个Redis命令的功能进行了封装,使得用户只需记住命令,具体的用法可以直接查看接口的声明,使用成本较低。go-redis对数据类型按照Redis底…...
)
python数据结构基础(3)
书接上文.要创建一个单链表类,首先是初始化方法: class singlelink:def __init__(self):self.head Noneself.tail Noneself.length0return 判断链表是否为空: def isempty(self):return self.length 0 向链表尾部添加节点: def add_node(self,item):if not isinstance(…...

java-智能识别车牌号_基于spring ai和开源国产大模型_qwen vl
用大模型做车牌号识别,最简单高效 在Java场景中,java识别车牌号的需求非常普遍。过去,我们主要依赖OCR等传统方法来实现java识别车牌号,但这些方法的效果往往不稳定。随着技术的发展,现在有了更先进的解决方案——大模…...

全局池化(Global Pooling)
普通池化操作看这里:最大池化(Max Pooling)和平均池化(Average Pooling) 全局池化(Global Pooling) 是一种特殊的池化方法,主要包括: 全局平均池化(Global …...
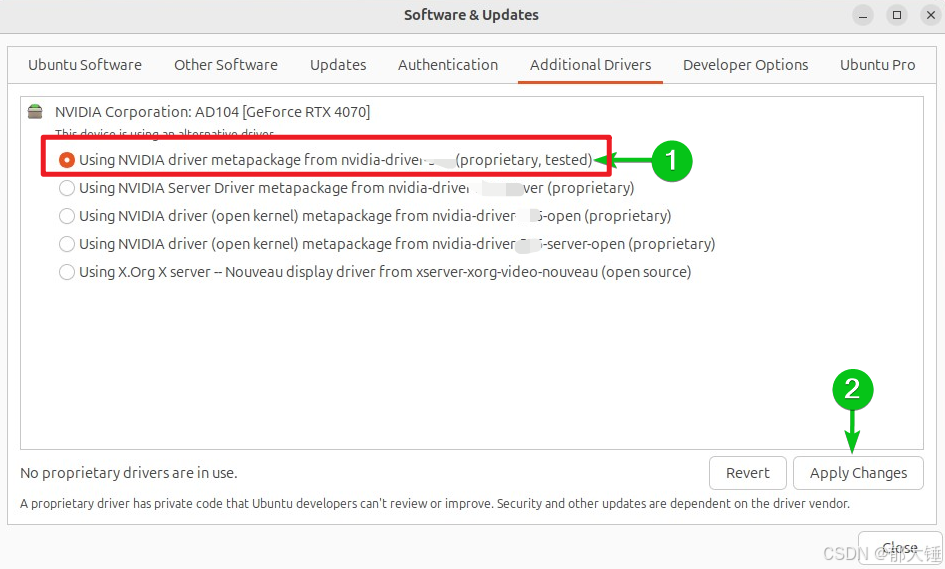
ubuntu 24.04运行chattts时cuda安装错误原因分析
使用ubuntu 24.04,按照2noise/ChatTTS官方流程安装依赖时报错。ChatTTShttps://github.com/2noise/ChatTTS 这是因为cuda版本不对,ChatTTS目前的版本,要求支持cuda 12.4及以上,但是如果nvidia显卡驱动版本较老,无法支…...

使用 Cypher 查询语言在 Neo4j 中查找最短路径
使用 Cypher 查询语言在 Neo4j 中查找最短路径 引言1. Cypher 查询语言简介2. 查找最短路径的 Cypher 查询3. 代码解释3.1 MATCH 关键字3.2 pshortestPath(3.3 (bacon:Person {name:"Kevin Bacon"})3.4 -[*]-3.5 (meg:Person {name:"Meg Ryan"})3.6 )3.7 R…...

Qt多边形填充/不填充绘制
1 填充多边形绘制形式 void GraphicsPolygonItem::paint(QPainter *painter, const QStyleOptionGraphicsItem *option, QWidget *widget) {Q_UNUSED(option);Q_UNUSED(widget);//painter->setPen(pen()); // 设置默认画笔//painter->setBrush(brush()); // 设置默…...

数据结构-数组(稀疏矩阵转置)和广义表
目录 1、数组定义 1)数组存储地址计算示例①行优先②列优先 2)稀疏矩阵的转置三元组顺序表结构定义 ①普通矩阵转置②三元组顺序表转置稀疏矩阵③稀疏矩阵的快速转置 3)十字链表结构定义 2、广义表定义 1)基本操作①GetHead②GetT…...

在华为欧拉openEuler 22.03 SP2上搞定Oracle 11g R2:一个踩坑无数的可视化安装实录
在华为欧拉openEuler 22.03 SP2上搞定Oracle 11g R2:一个踩坑无数的可视化安装实录 当国产操作系统遇上传统商业数据库,这场跨越技术栈的"联姻"注定充满挑战。作为在openEuler 22.03 SP2上成功部署Oracle 11g R2的实践者,我将以时间…...
)
手把手教你用VSCode+OpenOCD实时查看HPM6750外设寄存器(附SVD文件配置)
手把手教你用VSCodeOpenOCD实时监控HPM6750寄存器状态 调试嵌入式系统时,最令人头疼的莫过于面对一个"黑箱"——明明程序在跑,却看不到硬件寄存器的实时状态。这种盲目操作就像蒙着眼睛修车,效率低下且容易出错。本文将彻底解决这个…...

脉冲神经网络:低功耗AI计算的生物启发革命
1. 脉冲神经网络:生物启发的低功耗计算革命2014年,IBM发布TrueNorth芯片时,其每平方厘米功耗仅20毫瓦的性能震惊了整个AI界。这款基于脉冲神经网络(SNN)的芯片,能耗仅为传统CPU的万分之一,却能够实时处理视频流中的复杂…...

汽车电子TVS二极管选型与应用:从原理到30KW高功率防护实践
1. 项目概述:从一颗小小的TVS二极管说起最近和几个做汽车电子的老朋友聊天,大家不约而同地提到了同一个痛点:车上那些娇贵的ECU(电子控制单元)、传感器和CAN总线,动不动就被静电、抛负载或者雷击感应浪涌给…...

ClaudeCode安装与使用全攻略
一、安装 Claude Code 1. 安装 Claude Code 1.1 安装 Git 根据需求选择对应的安装方式: https://git-scm.com/book/zh/v2/%E8%B5%B7%E6%AD%A5-%E5%AE%89%E8%A3%85-Git windows 版本下载地址: https://git-scm.com/install/windows 1.2 安装 node…...

一线观察:赣州新房装修公司的可靠细节
上个月,有个老朋友找我帮他参谋新房装修的事。赣州章江新区某刚交付的高端盘,精装改毛坯,180平的大户型。他跟我说,前后跑了五六家装修公司,聊完最大的感觉是——云里雾里。报价单看不懂方案,总觉得藏着坑&…...

USB HID设备中断传输ACK机制与MDK实现
1. USB HID设备中断传输的ACK确认机制解析 在USB HID设备开发过程中,确保数据包被主机正确接收是许多开发者遇到的典型问题。当使用中断传输(Interrupt Transfer)方式发送HID报告时,设备端需要明确知道主机是否成功接收了数据。这是USB协议栈中一个关键但…...
)
别再手动算考勤了!我用Python+企业微信API写了个自动统计脚本(附源码)
告别手工考勤:Python企业微信API自动化统计实战指南 每次月底统计考勤时,行政同事总要加班到深夜,手动核对上百条打卡记录。迟到、早退、外勤打卡...各种状态让人眼花缭乱。作为技术团队的一员,我决定用Python企业微信API打造一个…...
)
毕业设计:基于springboot的林业产品推荐系统(源码)
4 系统设计当前,系统的类型有很多,从系统呈现的内容来看,系统的类型有社交类,有商业类,有政府类,有新闻类等。那么,在众多系统类型中,先明确将要设计的系统的类型才是系统设计的首要…...

别再手动刷纹理了!用Blender 3.6的镂版映射,5分钟给苹果模型贴上真实贴图
别再手动刷纹理了!Blender 3.6镂版映射实战指南 在数字艺术创作中,给3D模型添加纹理是赋予物体真实感的关键步骤。许多Blender初学者在掌握了基础UV展开后,往往会陷入手动绘制纹理的低效循环——用笔刷一点一点"涂抹"贴图ÿ…...