论文2—《基于柔顺控制的智能神经导航手术机器人系统设计》文献阅读分析报告
论文报告:基于卷积神经网络的手术机器人控制系统设计


摘要
本研究针对机器人辅助微创手术中定向障碍和缺乏导航信息的问题,设计了一种智能控制导航手术机器人系统。该系统采用可靠和安全的定位技术、7自由度机械臂以及避免关节角度限制的逆运动学控制策略,实现高灵活度的机械臂控制。通过术前影像进行手术导航与规划,并采用阻抗柔顺控制保护患者正常组织。智能语音控制实现了术中手术器械位置和姿态的微小调整。系统的有效性通过体模和尸头实验得到验证,显示出高精度的定位和轨迹跟踪能力,以及对手术器械与患者接触力的有效控制。
文献目的
本研究旨在解决传统机器人辅助微创手术中存在的定向障碍和导航信息不足的问题,提高手术的精确性和安全性。
研究问题
研究主要解决的问题包括:
- 如何实现手术机器人的高精度定位和导航。
- 如何提高手术机器人的操作灵活性和安全性。
- 如何通过智能控制减轻医生的操作负担。
使用的方法
研究采用了以下方法:
- 系统设计:设计了包含总控制子系统、手术导航子系统、机械臂及其控制子系统的智能手术机器人系统。
- 光学定位与空间配准技术:用于手术靶点与手术器械的实时跟踪。
- 逆运动学控制策略:避免关节角度限制,提高机械臂灵活性。
- 阻抗柔顺控制:限制手术器械与患者接触力,保护正常组织。
- 智能语音控制:实现术中手术器械位姿的微调。
- 实验验证:通过体模和尸头实验验证系统的有效性。
主要发现
- 系统定位误差小于1mm,轨迹追踪角度误差小于2.5°。
- 术中导航能实时跟踪手术靶点与器械。
- 阻抗柔顺控制可将手术器械与患者接触力降低至1.2N以下。
- 基于语音识别的精细调控满足术中对手术器械运动控制的要求。
作者的结论
所设计的手术机器人系统在机器人辅助微创手术中具有潜在的应用前景,能有效提高手术精度和安全性,减轻医生负担。
创新点
- 智能控制导航手术机器人系统:集成了光学定位、空间配准技术和智能语音控制,提高了手术导航的精确性和操作的灵活性。
- 7自由度机械臂设计:通过避免关节角度限制的逆运动学控制策略,提升了机械臂的操作范围和灵活性。
- 阻抗柔顺控制:在手术过程中有效保护患者正常组织,减少损伤。
- 智能语音控制:通过语音指令实现手术器械的精细调整,减轻医生操作负担。

对现有研究的贡献
本研究通过实际的系统设计和实验验证,推动了手术机器人技术的发展,特别是在提高手术精度、安全性和操作便捷性方面。研究成果为未来手术机器人的临床应用提供了有价值的参考和技术支持。
针对基于柔顺控制的智能神经导航手术机器人系统设计的研究兴趣,以下是一些有效的参考资料,可以帮助您更深入地了解相关领域的最新进展和技术细节:
1. 手术机器人技术基础
- “Surgical Robotics: Systems Applications and Visions” by Russell H. Taylor 和 Adam F. DiGioia. 这本书提供了手术机器人系统的全面概述,包括系统设计、应用和未来展望。
- “Robotics in Surgery” by Dan Stoianovici. 详细介绍了手术机器人的基本原理和技术,适合作为入门读物。
2. 柔顺控制与智能控制
- “Compliance Control in Robotics” by Oussama Khatib, Kaijen Hsiao, and Masayuki Inaba. 这本书讨论了机器人柔顺控制的理论和技术。
- “Intelligent Control Systems” by Magdi S. Mahmoud, Mohamed F. Hassan, and Samy A. Meguid. 探讨了智能控制系统的设计和应用。
3. 导航与定位技术
- “Medical Image Computing and Computer-Assisted Intervention” by Carl-Fredrik Westin. 这本书涵盖了医学图像计算和计算机辅助干预的各个方面,包括导航和定位技术。
- “Principles of Computer-Assisted Radiology and Surgery” by Horst-C. Nierhoff 和 Karl Heinz Hohne. 详细介绍了计算机辅助放射学和手术的原理,包括导航技术。
4. 人机交互与语音控制
- “Human-Robot Interaction: Designing for Human Centered Machines” by Clive Finkelstein. 这本书讨论了人机交互的设计原则,包括语音控制技术。
- “Speech and Language Processing” by Daniel Jurafsky and James H. Martin. 提供了语音处理和识别的基础知识,适合了解语音控制模块的开发。
5. 手术机器人的临床应用
- “The Lancet: Robotics in Surgery” 特刊。提供了手术机器人在临床应用中的最新研究成果和案例分析。
- “Journal of Medical Robotics and Computer Assisted Surgery”。这个期刊发表了手术机器人领域的最新研究成果,包括系统设计、临床试验和技术创新。
这些资料涵盖了手术机器人的核心技术领域,包括系统设计、柔顺控制、导航定位技术、人机交互以及临床应用。通过阅读这些资料,您可以获得更深入的理解和知识,以支持您的研究和学习。
相关文章:
论文2—《基于柔顺控制的智能神经导航手术机器人系统设计》文献阅读分析报告
论文报告:基于卷积神经网络的手术机器人控制系统设计 摘要 本研究针对机器人辅助微创手术中定向障碍和缺乏导航信息的问题,设计了一种智能控制导航手术机器人系统。该系统采用可靠和安全的定位技术、7自由度机械臂以及避免关节角度限制的逆运动学控制策…...
)
试编写算法将单链表就地逆置(默认是带头节 点,如果是不带头节点地逆置呢?)
编写一个算法来就地逆置一个单链表。默认情况下,链表是带头节点的,但如果链表不带头节点,逆置的过程会有所不同。 第一步:定义逆置函数 根据题目中的“试编写算法将单链表就地逆置”,我们需要: 定义一个…...

FPGA学习笔记#3 Vitis HLS编程规范、数据类型、基本运算
本笔记根据笔者目前的项目确定学习目标,目前主要集中在Vitis HLS上,使用的Vitis HLS版本为2022.2,在windows11下运行,仿真part为xcku15p_CIV-ffva1156-2LV-e,从这一篇开始是HLS的学习进度,主要根据教程&…...

爬虫 - 二手交易电商平台数据采集 (一)
背景: 近期有一个需求需要采集某电商网站平台的商品数据进行分析。因此,我计划先用Python实现一个简单的版本,以快速测试技术的实现可能性,再用PHP实现一个更完整的版本。文章中涉及的技术仅为学习和测试用途,请勿用于商业或非法用…...

“成交量分布指标“,通过筹码精准锁定价格方向+简单找市场支撑压力位 MT4免费公式!
指标名称:成交量分布指标 版本:MT4 ver. 1.32 之前发布的市场分布图不少朋友反馈不错,希望获得其它版本。 这个版本只有MT4的,MT5可以看之前版本,链接: “市场分布图”,精准把握价格动向 更直…...

简记Vue3(四)—— 路由
个人简介 👀个人主页: 前端杂货铺 🙋♂️学习方向: 主攻前端方向,正逐渐往全干发展 📃个人状态: 研发工程师,现效力于中国工业软件事业 🚀人生格言: 积跬步…...

Python批量合并多个PDF
在日常工作中,处理和合并多个 PDF 文件是一个常见需求,尤其是在需要将大量文件整理成一个完整文档时。本文将详细介绍如何使用 Python 的 PyMuPDF 库来实现批量 PDF 文件合并,并提供针对大文件优化的解决方案。 安装 PyMuPDF 要使用 PyMuPD…...

Linux:vim命令总结及环境配置
文章目录 前言一、vim的基本概念二、vim模式命令解析1. 命令模式1)命令模式到其他模式的转换:2)光标定位:3)其他命令: 2. 插入模式3. 底行模式4. 替换模式5. 视图模式6. 外部命令 三、vim环境的配置1. 环境…...

贪心算法day05(k次取反后最大数组和 田径赛马)
目录 1.k次取反后最大化的数组和 2.按身高排序 3.优势洗牌 1.k次取反后最大化的数组和 题目链接:. - 力扣(LeetCode) 思路: 代码: class Solution {public int largestSumAfterKNegations(int[] nums, int k) {//如…...
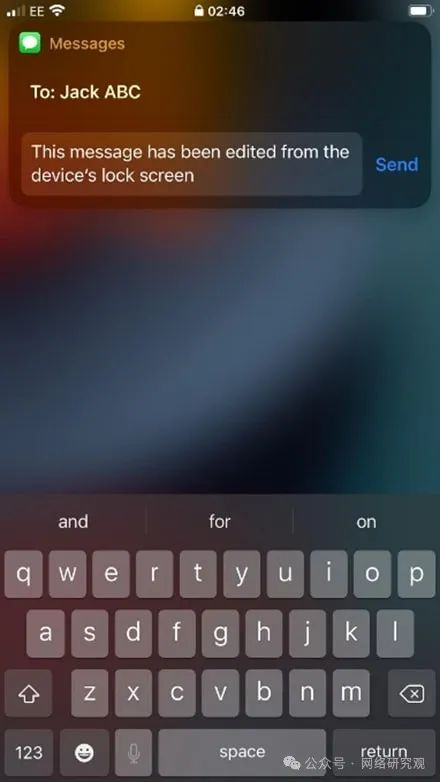
默认 iOS 设置使已锁定的 iPhone 容易受到攻击
苹果威胁研究的八个要点 苹果手机间谍软件问题日益严重 了解 Apple 苹果的设备和服务器基础模型发布 尽管人们普遍认为锁定的 iPhone 是安全的,但 iOS 中的默认设置可能会让用户面临严重的隐私和安全风险。 安全研究员 Lambros 通过Pen Test Partners透露&#…...

上海市计算机学会竞赛平台2024年11月月赛丙组
题目描述 在一个棋盘上,有两颗棋子,一颗棋子在第 aa 行第 bb 列,另一个颗棋子在第 xx 行第 yy 列。 每一步,可以选择一个棋子沿行方向移动一个单位,或沿列方向移动一个单位,或同时沿行方向及列方向各移动…...

Python批量设置图片背景为透明
我们日常生活中制作PPT等教学资源时,需要批量去除图片背景,就可以使用 Python 的 rembg 库。 这个库基于神经网络模型,去背景效果较好,可以批量处理png, jpg, jpeg等图片。采用以下代码可以批量处理当前目录下的所有图片…...

Vue CLI 脚手架
cli脚手架创建项目步骤 全局安装(一次):yarn global add vue/cli 无法识别yarn的要先安装yarn;终端执行npm install -g yarn 查看Vue版本:vue --version 这里有问题(success上方有warning) 报错:‘vue’不是内部或外部…...

Linux【基础篇】
-- 原生罪 linux的入门安装学习 什么是操作系统? 用户通过操作系统和计算机硬件联系使用。桥梁~ 什么是Linux? 他是一套开放源代码(在互联网上找到Linux系统的源代码,C语言写出的软件),可以自由 传播&…...

多线程环境下安全地使用 SimpleDateFormat的常见方法
文章目录 1. 使用局部变量(每个线程独立一个实例)2. 使用 ThreadLocal<SimpleDateFormat>3. 使用 DateTimeFormatter(Java 8 及以上)4. 使用 DateFormat 子类(如 FastDateFormat)5. 使用 synchronize…...

easyexcel实现自定义的策略类, 最后追加错误提示列, 自适应列宽,自动合并重复单元格, 美化表头
easyexcel实现自定义的策略类, 最后追加错误提示列, 自适应列宽,自动合并重复单元格, 美化表头 原版表头和表体字体美化自动拼接错误提示列自适应宽度自动合并单元格使用Easyexcel使用poi导出 在后台管理开发的工作中,离不开的就是导出excel了. 如果是简单的导出, 直接easyexce…...

ANDROIDWORLD: A Dynamic Benchmarking Environment for Autonomous Agents论文学习
这个任务是基于androidenv的。这个环境之前学过,是一个用来进行强化学习的线上环境。而这篇文章的工作就是要给一些任务加上中间的奖励信号。这种训练环境的优点就是动态,与静态的数据集(比如说我自己的工作)不同,因此…...
)
Docker 常用命令详解(详细版)
Docker 是一个开源的容器化平台,它使得开发人员可以打包应用程序及其所有依赖项,并在任何环境中运行。Docker 提供了简单而强大的命令行工具来管理容器、镜像、网络等。本文将详细介绍 Docker 的常用命令及其使用方法。 1. 安装 Docker 在使用 Docker …...

【网络安全 | 甲方安全建设】分布式系统、Redis分布式锁及Redisson看门狗机制
未经许可,不得转载。 文章目录 分布式系统分布式系统的核心特性分布式系统的典型架构分布式锁概念Redis 分布式锁原理互斥性锁释放锁的唯一性具体实现Redisson分布式锁分布式系统 分布式系统是一种由多台计算机(节点)组成的系统,这些节点通过网络相互连接并协同工作,共同…...

「QT」几何数据类 之 QLineF 浮点型直线类
✨博客主页何曾参静谧的博客📌文章专栏「QT」QT5程序设计📚全部专栏「VS」Visual Studio「C/C」C/C程序设计「UG/NX」BlockUI集合「Win」Windows程序设计「DSA」数据结构与算法「UG/NX」NX二次开发「QT」QT5程序设计「File」数据文件格式「PK」Parasolid…...

CVPR2025新星DehazeXL:开源8K去雾数据集与可解释归因图,高分辨率图像处理新范式
1. 高分辨率图像去雾的痛点与DehazeXL的突破 第一次处理8K航拍图像时,我盯着显存不足的报错信息愣了半天——当时用的某知名去雾模型,光是加载81928192的图片就吃掉了48GB显存。这其实是高分辨率图像处理领域的普遍困境:传统方法要么被迫降采…...

Netgear路由器Telnet功能启用工具:技术解析与实践指南
Netgear路由器Telnet功能启用工具:技术解析与实践指南 【免费下载链接】netgear_telnet Netgear Enable Telnet (New Crypto) 项目地址: https://gitcode.com/gh_mirrors/ne/netgear_telnet 一、功能价值:技术突破点与应用场景 1.1 核心功能概述…...
)
LM339比较器实战:手把手教你搭建电池电压监测电路(附电路图)
LM339比较器实战:手把手教你搭建电池电压监测电路(附电路图) 1. 为什么选择LM339作为电池监测核心器件? 在电子设计领域,电压监测是保障设备稳定运行的基础功能之一。LM339作为一款经典的四路电压比较器,…...

模型介导钓鱼:AI 助手被诱导生成钓鱼内容的机理与防御
摘要 随着 Microsoft 365 Copilot、Google Gemini for Workspace 等 AI 助手在企业办公场景的深度普及,一类依托提示注入实现的模型介导钓鱼(Model-Mediated Phishing) 攻击快速兴起。攻击者通过在正常邮件中嵌入低可见性恶意指令,…...

基于MATLAB的图像加密解密系统 可以正确无误的对图像进行加密和解密 带GUI界面
基于MATLAB的图像加密解密系统 可以正确无误的对图像进行加密和解密 带GUI界面,一步一步完整运行你是否有过这样的疑问——如何让一张普通图片变成外星密文?在MATLAB里玩转图像加密真的可以像搭积木一样简单。今天咱们就来捣鼓一个带界面的图像加密系统&…...

ECDICT开源英汉词典数据库:构建高可用分布式语言服务的完整技术方案
ECDICT开源英汉词典数据库:构建高可用分布式语言服务的完整技术方案 【免费下载链接】ECDICT Free English to Chinese Dictionary Database 项目地址: https://gitcode.com/gh_mirrors/ec/ECDICT ECDICT是一个完全免费的开源英汉词典数据库,为开…...

如何快速实现分布式定时任务?Disque完整指南详解
如何快速实现分布式定时任务?Disque完整指南详解 【免费下载链接】disque Disque is a distributed message broker 项目地址: https://gitcode.com/gh_mirrors/di/disque 分布式定时任务在现代应用中至关重要,而Disque作为Redis作者antirez开发的…...

Simple Form终极性能优化指南:如何实现Rails表单批量查询
Simple Form终极性能优化指南:如何实现Rails表单批量查询 【免费下载链接】simple_form Forms made easy for Rails! Its tied to a simple DSL, with no opinion on markup. 项目地址: https://gitcode.com/gh_mirrors/si/simple_form Simple Form是Rails生…...

【开题答辩全过程】以 校园超市购物系统为例,包含答辩的问题和答案
个人简介一名14年经验的资深毕设内行人,语言擅长Java、php、微信小程序、Python、Golang、安卓Android等开发项目包括大数据、深度学习、网站、小程序、安卓、算法。平常会做一些项目定制化开发、代码讲解、答辩教学、文档编写、也懂一些降重方面的技巧。感谢大家的…...

手机号定位终极指南:3分钟掌握号码背后的位置秘密
手机号定位终极指南:3分钟掌握号码背后的位置秘密 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_mirrors/…...