PySpark本地开发环境搭建
一.前置事项
请注意,需要先实现Windows的本地JDK和Hadoop的安装。
二.windows安装Anaconda
资源:Miniconda3-py38-4.11.0-Windows-x86-64,在window使用的Anaconda资源-CSDN文库
右键以管理员身份运行,选择你的安装路径,但是请注意最好文件路径不要有空格或者中文,并且要自己找得到。
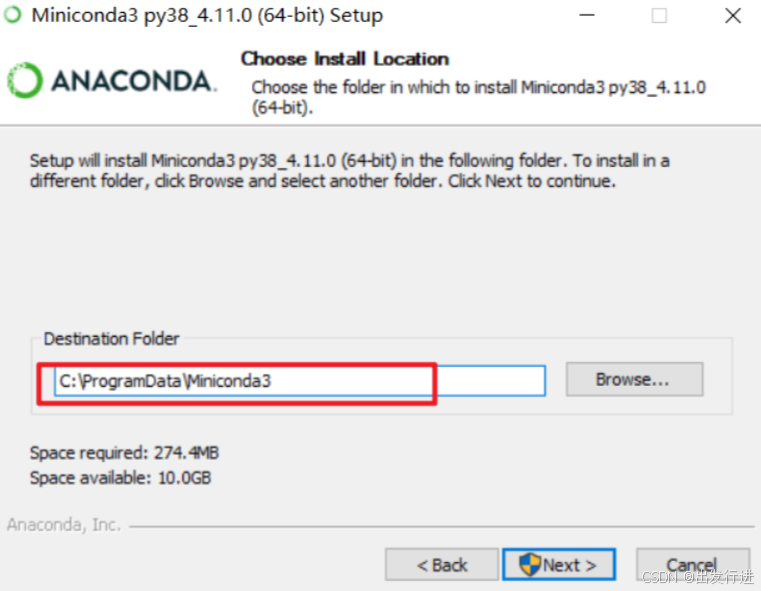
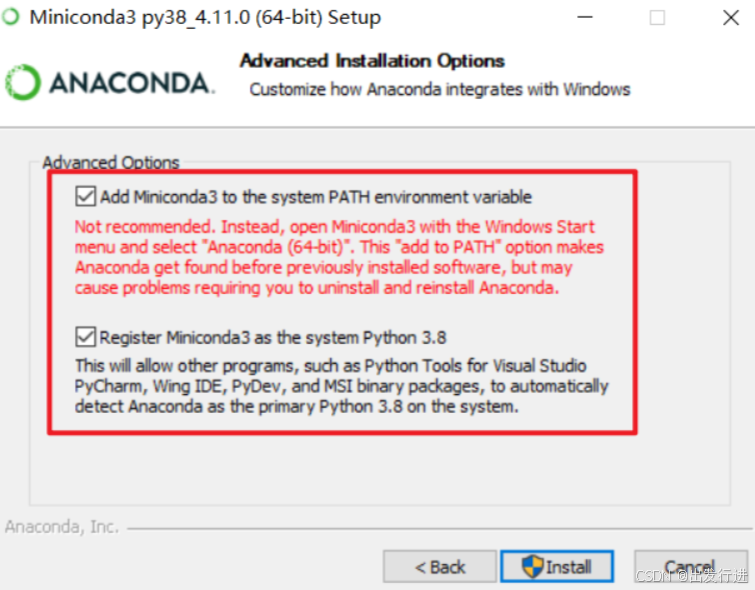
然后傻瓜式安装即可。
三.Anaconda中安装PySpark
进入黑窗口,操作如下:
进入base环境中:
conda activate base
安装pyspark [此时的pyspark和pyspark命令不是一会儿事儿]
pip install pyspark==3.1.2 -i https://pypi.tuna.tsinghua.edu.cn/simple/也可以使用阿里云的源:https://mirrors.aliyun.com/pypi/simple中间如果遇到输入y或者n,就输入y
检查是否安装成功:
可以通过conda list或者pip list检查是否包含:py4j和 pyspark两个包。
四.Pycharm中创建工程
如图:
大概介绍一下目前为止都在干什么:
Annaconda : 这个软件它包含了Python,并且可以安装各种环境,比如pyspark
PySpark : pip install pyspark==3.1.2 首先这个是pyspark的开发环境,这个软件安装在了 Annaconda里面,所以Annaconda 安装在了哪个盘,你这个pyspark 就在哪个盘。
pycharm: 这个是一个IDE工具,IDE工具关联了 本地的Annaconda,你这个Annaconda 里面有什么工具,pycharm 中就可以使用什么工具。
假如我没有在黑窗口安装这个pyspark ,就关联了pycharm ,请问,这个pycharm 如何才能有pyspark的环境?
那么继续,创建项目后来检查一下:
看一下如下文件夹里面是否有py4j和pyspark:
有的话恭喜没有问题,那么继续下一步:
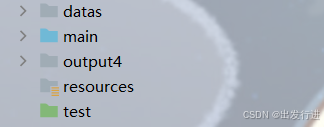
创建四个文件夹:
main :用于存放每天开发的一些代码文件
resources :用于存放程序中需要用到的配置文件
datas :用于存放每天用到的一些数据文件
test :用于存放测试时的一些代码文件
main和resource的创建后:
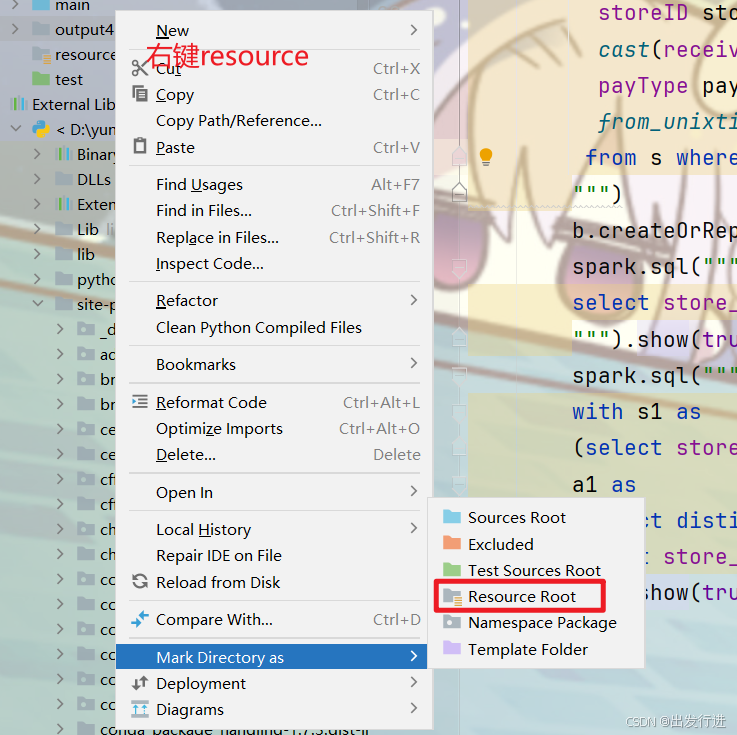
同理test选择test sources root,一样的操作不再放图了。
好的,那么准备工作已经完成,来写一个代码测试一下:
在main里新建一个Python文件然后:
import osif __name__ == '__main__':print("你好")os.environ['JAVA_HOME'] = 'D:/Program Files/Java/jdk1.8.0_271'# 配置Hadoop的路径,就是前面解压的那个路径os.environ['HADOOP_HOME'] = 'D:/hadoop-3.3.1/hadoop-3.3.1'# 配置base环境Python解析器的路径os.environ['PYSPARK_PYTHON'] = 'C:/ProgramData/Miniconda3/python.exe' # 配置base环境Python解析器的路径os.environ['PYSPARK_DRIVER_PYTHON'] = 'C:/ProgramData/Miniconda3/python.exe'
请改成自己电脑里的配置。
获取SparkContext对象:
Spark中的核心类,任何一个Spark的程序都必须包含一个SparkContext类的对象
import os
# 导入pyspark模块
from pyspark import SparkContext,SparkConfif __name__ == '__main__':# 配置环境os.environ['JAVA_HOME'] = 'D:/Program Files/Java/jdk1.8.0_271'# 配置Hadoop的路径,就是前面解压的那个路径os.environ['HADOOP_HOME'] = 'D:/hadoop-3.3.1/hadoop-3.3.1'# 配置base环境Python解析器的路径os.environ['PYSPARK_PYTHON'] = 'C:/ProgramData/Miniconda3/python.exe' # 配置base环境Python解析器的路径os.environ['PYSPARK_DRIVER_PYTHON'] = 'C:/ProgramData/Miniconda3/python.exe'# 获取 conf 对象# setMaster 按照什么模式运行,local bigdata01:7077 yarn# local[2] 使用2核CPU * 你本地资源有多少核就用多少核# appName 任务的名字conf = SparkConf().setMaster("local[*]").setAppName("第一个Spark程序")# 假如我想设置压缩# conf.set("spark.eventLog.compression.codec","snappy")# 根据配置文件,得到一个SC对象,第一个conf 是 形参的名字,第二个conf 是实参的名字sc = SparkContext(conf=conf)print(sc)# 使用完后,记得关闭sc.stop()运行结果如下:
可见非常明显的问题,每次都要写入这固定的环境配置,非常麻烦,那么我们将它模板化:
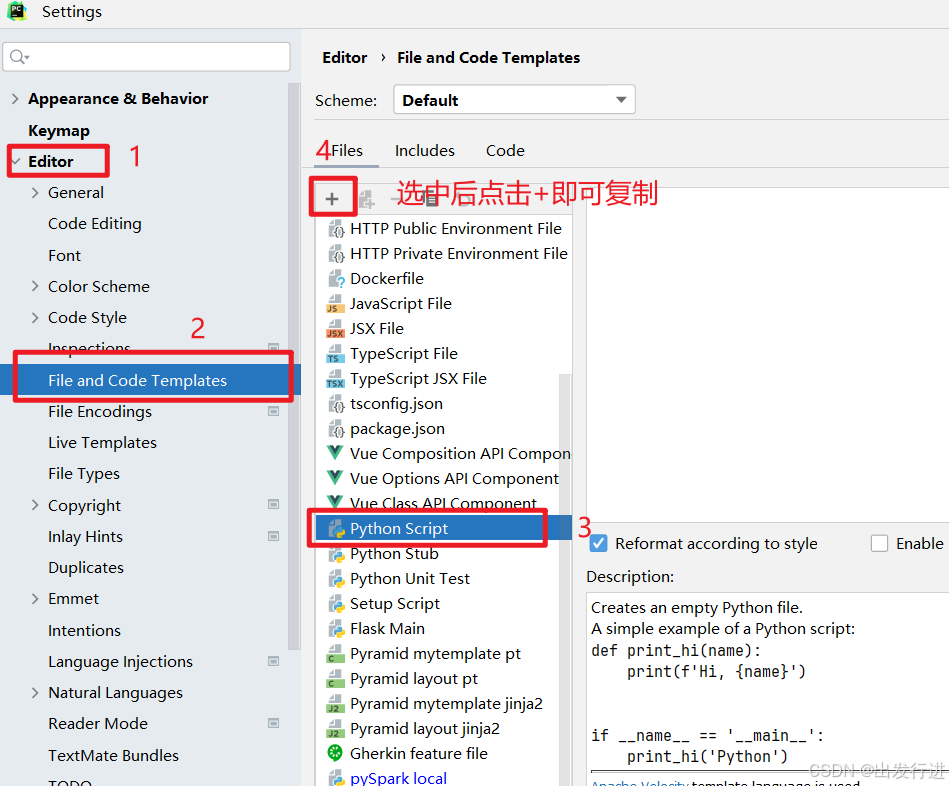
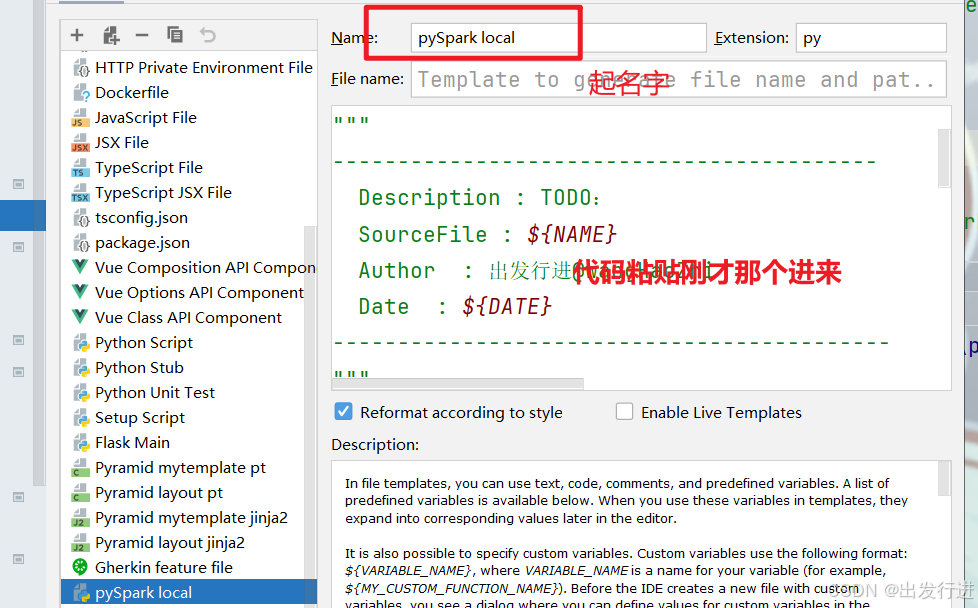
配置完成后记得是要点击:![]()
再退出,否则没有保存的话肯定用不了,
然后再次进行新建的时候:
就可以直接选择我们的模板了。非常的方便。
相关文章:
PySpark本地开发环境搭建
一.前置事项 请注意,需要先实现Windows的本地JDK和Hadoop的安装。 二.windows安装Anaconda 资源:Miniconda3-py38-4.11.0-Windows-x86-64,在window使用的Anaconda资源-CSDN文库 右键以管理员身份运行,选择你的安装路径&#x…...

【进阶】Stable Diffusion 插件 Controlnet 安装使用教程(图像精准控制)
Stable Diffusion WebUI 的绘画插件 Controlnet 最近更新了 V1.1 版本,发布了 14 个优化模型,并新增了多个预处理器,让它的功能比之前更加好用了,最近几天又连续更新了 3 个新 Reference 预处理器,可以直接根据图像生产…...

调试、发布自己的 npm 包
查看 npm 的配置 npm config ls登录 whoami 查看当前登录的用户 npm whoamiaduser 登录 adduser 有以下参数: –scope 作用域–registry 注册地址 默认地址:https://registry.npmjs.org/,也可通过.npmrc文件配置 npm login 是 …...

拓扑学与DNA双螺旋结构的奇妙连接:从算法到分子模拟
拓扑的形变指的是通过连续地拉伸、弯曲或扭曲物体而不进行撕裂或粘合来改变其形状的一种数学变换。拓扑形变属于拓扑学的一个分支,研究在这些操作下保持不变的性质。简单来说,它关注的是物体“形状的本质”,而不是具体的几何形状。 拓扑形变…...
单表查询)
mysql数据库(四)单表查询
单表查询 文章目录 单表查询一、单表查询1.1 简单查询1.2where1.3group by1.4having1.5order by1.6limit 一、单表查询 记录的查询语法如下: SELECT DISTINCT(去重) 字段1,字段2… FROM 表名 WHERE 筛选条件 GROUP BY 分组 HAVING 分组筛选 ORDER BY 排序 LIMIT 限…...
JavaEE初阶---properties类+反射+注解
文章目录 1.配置文件properities2.快速上手3.常见方法3.1读取配置文件3.2获取k-v值3.3修改k-v值3.4unicode的说明 4.反射的引入4.1传统写法4.2反射的写法(初识)4.3反射的介绍4.4获得class类的方法4.5所有类型的class对象4.6类加载过程4.7类初始化的过程4…...

HarmonyOS一次开发多端部署三巨头之功能级一多开发和工程级一多开发
功能级一多开发与工程级一多开发 引言功能级一多开发SysCaps机制介绍能力集canlUse接口 工程级一多开发三层架构规范 引言 一次开发多端部署 定义:一套代码工程,一次开发上架,多端按需部署 目标:支撑开发者快速高效的开发多终端设…...

STL常用遍历算法
概述: 算法主要是由头文件<algorithm> <functional> <numeric>组成。 <algorithm>是所有STL头文件中最大的一个,范围涉及到比较、 交换、查找、遍历操作、复制、修改等等 <numeric>体积很小,只包括几个在序列上面进行简…...

前端开发中常见的ES6技术细节分享一
var、let、const之间有什么区别? var: 在ES5中,顶层对象的属性和全局变量是等价的,用var声明的变量既是全局变量,也是顶层变量 注意:顶层对象,在浏览器环境指的是window对象,在 Node 指的是g…...

行业类别-智慧城市-子类别智能交通-细分类别自动驾驶技术-应用场景城市公共交通优化
1.大纲分析 针对题目“8.0 行业类别-智慧城市-子类别智能交通-细分类别自动驾驶技术-应用场景城市公共交通优化”的大纲分析,可以从以下几个方面进行展开: 一、引言 简述智慧城市的概念及其重要性。强调智能交通在智慧城市中的核心地位。引出自动驾驶…...

[High Speed Serial ] Xilinx
Xilinx 高速串行数据接口 收发器产品涵盖了当今高速协议的方方面面。GTH 和 GTY 收发器提供要求苛刻的光互连所需的低抖动,并具有世界一流的自适应均衡功能,具有困难的背板操作所需的 PCS 功能。 Versal™ GTY (32.75Gb/s)&…...

Unity学习笔记(3):场景绘制和叠层设置 Tilemap
文章目录 前言开发环境规则瓦片绘制拐角 动态瓦片总结 前言 这里学一下后面的场景绘制和叠层技巧。 开发环境 Unity 6windows 11vs studio 2022Unity2022.2 最新教程《勇士传说》入门到进阶|4K:https://www.bilibili.com/video/BV1mL411o77x/?spm_id_from333.10…...

不吹不黑,客观理性深入讨论中国信创现状
1. 题记: 随着美国大选尘埃落定,特朗普当选美国新一任总统,参考他之前对中国政策的风格,个人预计他将进一步限制中国半导体产业和信创产业的发展。本篇博文不吹不黑,客观理性深入探讨中国信创现状。文中数据来自权威媒…...
NoSQL数据库的基本原理)
NoSQL大数据存储技术测试(2)NoSQL数据库的基本原理
写在前面:未完成测试的同学,请先完成测试,此博文供大家复习使用,(我的答案)均为正确答案,大家可以放心复习 单项选择题 第1题 NoSQL的主要存储模式不包括 键值对存储模式 列存储模式 文件…...

「QT」几何数据类 之 QPoint 整型点类
✨博客主页何曾参静谧的博客📌文章专栏「QT」QT5程序设计📚全部专栏「VS」Visual Studio「C/C」C/C程序设计「UG/NX」BlockUI集合「Win」Windows程序设计「DSA」数据结构与算法「UG/NX」NX二次开发「QT」QT5程序设计「File」数据文件格式「PK」Parasolid…...

植物明星大乱斗5
能帮到你的话,就给个赞吧 😘 文章目录 timer.htimer.cppcamera.hcamera.cppmenuScene.cpp timer.h #pragma once #include <functional>class Timer {public:void reStart();void setTimer(int timerMs);void setIsOneShot(bool isOneShot);void …...

每日算法练习
各位小伙伴们大家好,今天给大家带来几道算法题。 题目一 算法分析 首先,我们应该知道什么是完全二叉树:若一颗二叉树深度为n,那么前n-1层是满二叉树,只有最后一层不确定。 给定我们一棵完全二叉树,我们查看…...

把握鸿蒙生态崛起机遇:开发者如何在全场景操作系统中脱颖而出
把握鸿蒙生态崛起机遇:开发者如何在全场景操作系统中脱颖而出 随着鸿蒙系统的逐步成熟和生态体系的扩展,其与安卓、iOS 形成了全新竞争格局,为智能手机、穿戴设备、车载系统和智能家居等领域带来了广阔的应用前景。作为开发者,如…...

字符串类型排序,通过枚举进行单个维度多个维度排序
字符串类型进行排序通过定义枚举值实现 1.首先创建一个测试类,并实现main方法 2.如果是单个维度的排序,则按照顺序定义一个枚举 public enum Risk {高风险,中风险,一般风险,低风险 } public static void main(String[] args) { }3.main方法里实现如下…...

figma的drop shadow x:0 y:4 blur:6 spread:0 如何写成css样式
figma的drop shadow x:0 y:4 blur:6 spread:0 如何写成css样式 在CSS中,我们可以使用box-shadow属性来模拟Figma中的Drop Shadow效果。box-shadow属性接受的值分别是:横向偏移、纵向偏移、模糊半径、扩展半径和颜色。 但是,Figma的Drop Sha…...

异构GPU推理优化:Tessera架构解析与实践
1. 异构GPU推理的性能瓶颈与挑战在当前的AI推理服务部署中,混合使用不同代际的GPU已经成为提升性价比的常见做法。比如将最新的H100与相对便宜的L40S搭配使用,或者将计算密集型的B200与内存优化的H100组合部署。然而,这种异构环境下的资源利用…...
2026-05-11 全国各地响应最快的 BT Tracker 服务器(联通版)
数据来源:https://bt.me88.top 序号Tracker 服务器地域网络响应(毫秒)1udp://60.172.236.18:6969/announce安徽芜湖联通102udp://118.196.100.63:6969/announce安徽芜湖联通113http://211.75.205.187:6969/announce安徽芜湖联通384http://211.75.205.188:80/announ…...

LiteLoaderQQNT插件加载器:从简单加载到企业级插件生态的完整进化指南
LiteLoaderQQNT插件加载器:从简单加载到企业级插件生态的完整进化指南 【免费下载链接】LiteLoaderQQNT QQNT 插件加载器:LiteLoaderQQNT —— 轻量 简洁 开源 福瑞 项目地址: https://gitcode.com/gh_mirrors/li/LiteLoaderQQNT LiteLoaderQQ…...
)
ConcurrentHashMap详细讲解(java)
文章目录前言一、 为什么用ConcurrentHashMap1.1 什么是 ConcurrentHashMap1.2 为什么用ConcurrentHashMap二、 并发和锁的基础知识2.1 缘起:硬件的“木桶效应”与 JMM 的诞生2.2 并发编程的三大核心危机2.2.1 可见性问题:CPU 缓存引发的“盲区”2.2.2 原…...

基于区块链与IPFS的视频版权存证系统之区块链部分设计
本节对视频版权存证系统的区块链部分做一个简单的介绍,包括目录结构、文件作用、设计思路。 购买专栏前请认真阅读:《基于区块链与IPFS的视频版权存证系统》专栏简介 一、区块链部分文件目录简介 ├── bin //保存了二进制文件方便启动网络 │ ├── configtxgen //生成…...

基于Node.js的Gemini CLI蓝图:构建高效AI命令行工具
1. 项目概述:一个让Gemini API在命令行中“活”起来的蓝图 如果你和我一样,日常工作中大量时间都泡在终端里,那么你肯定理解那种感觉:为了调用一个AI模型,不得不频繁地在浏览器、API文档和命令行之间来回切换ÿ…...

跨端三维GIS实战:uni-app集成Cesium.js的RenderJS方案解析
1. 为什么需要跨端三维GIS解决方案 最近几年三维GIS应用越来越普及,从传统的Web端到移动端APP,开发者都希望实现"一次开发,多端运行"的目标。uni-app作为跨端开发框架,天然具备这个优势。但当我们想在uni-app中集成Cesi…...

NVIDIA aicr:AI容器运行时核心原理与生产部署指南
1. 项目概述:当AI遇见容器运行时如果你在AI开发或者高性能计算领域摸爬滚打过一段时间,大概率会遇到一个让人头疼的问题:如何高效、稳定地管理那些“胃口”巨大、依赖复杂的AI工作负载?从训练一个大型语言模型到运行一个实时的计算…...

MATLAB 2018a/2023b实测:Libsvm安装后如何用自带数据集快速验证与跑通第一个模型
MATLAB 2018a/2023b实战:Libsvm安装后快速验证与模型跑通全流程 当你第一次在MATLAB中成功安装Libsvm后,那种兴奋感可能很快会被"接下来该做什么"的迷茫所取代。别担心,这篇文章将带你用Libsvm自带的heart_scale数据集,…...

5G技术授权商业化的七大挑战与市场可行性深度解析
1. 项目概述:一次关于5G技术授权商业可行性的深度探讨最近在整理行业资料时,翻到一篇2019年EE Times上的旧文,标题挺抓人眼球,叫《授权华为5G技术可能是个坏主意的30个理由》。文章的核心是讨论当时华为创始人提出的一项设想&…...